JP6828024B2 - Petスキャナーを較正するためのシステム及び方法 - Google Patents
Petスキャナーを較正するためのシステム及び方法 Download PDFInfo
- Publication number
- JP6828024B2 JP6828024B2 JP2018514820A JP2018514820A JP6828024B2 JP 6828024 B2 JP6828024 B2 JP 6828024B2 JP 2018514820 A JP2018514820 A JP 2018514820A JP 2018514820 A JP2018514820 A JP 2018514820A JP 6828024 B2 JP6828024 B2 JP 6828024B2
- Authority
- JP
- Japan
- Prior art keywords
- tof
- radiation source
- lor
- pet scanner
- detector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 0 *CC(C=C)C#N Chemical compound *CC(C=C)C#N 0.000 description 1
Images

























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01T—MEASUREMENT OF NUCLEAR OR X-RADIATION
- G01T7/00—Details of radiation-measuring instruments
- G01T7/005—Details of radiation-measuring instruments calibration techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01T—MEASUREMENT OF NUCLEAR OR X-RADIATION
- G01T1/00—Measuring X-radiation, gamma radiation, corpuscular radiation, or cosmic radiation
- G01T1/29—Measurement performed on radiation beams, e.g. position or section of the beam; Measurement of spatial distribution of radiation
- G01T1/2914—Measurement of spatial distribution of radiation
- G01T1/2985—In depth localisation, e.g. using positron emitters; Tomographic imaging (longitudinal and transverse section imaging; apparatus for radiation diagnosis sequentially in different planes, steroscopic radiation diagnosis)
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N23/00—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00
- G01N23/22—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by measuring secondary emission from the material
- G01N23/2206—Combination of two or more measurements, at least one measurement being that of secondary emission, e.g. combination of secondary electron [SE] measurement and back-scattered electron [BSE] measurement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2201/00—Features of devices classified in G01N21/00
- G01N2201/12—Circuits of general importance; Signal processing
- G01N2201/121—Correction signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2201/00—Features of devices classified in G01N21/00
- G01N2201/12—Circuits of general importance; Signal processing
- G01N2201/124—Sensitivity
- G01N2201/1245—Averaging several measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2201/00—Features of devices classified in G01N21/00
- G01N2201/12—Circuits of general importance; Signal processing
- G01N2201/127—Calibration; base line adjustment; drift compensation
- G01N2201/12746—Calibration values determination
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/07—Investigating materials by wave or particle radiation secondary emission
- G01N2223/071—Investigating materials by wave or particle radiation secondary emission combination of measurements, at least 1 secondary emission
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/30—Accessories, mechanical or electrical features
- G01N2223/303—Accessories, mechanical or electrical features calibrating, standardising
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/30—Accessories, mechanical or electrical features
- G01N2223/304—Accessories, mechanical or electrical features electric circuits, signal processing
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- High Energy & Nuclear Physics (AREA)
- Molecular Biology (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Nuclear Medicine (AREA)
- Measurement Of Radiation (AREA)
Description
本願は、2015年9月21日出願の中国特許出願第201510603207.2号、2015年11月28日出願の中国特許出願第201510854615.5号、2015年12月31日出願の中国特許出願第201511031899.4号、2015年12月31日出願の中国特許出願第201521140680.3号、及び2016年6月2日出願の米国特許出願第15/171,877号の優先権を主張し、各出願の内容が参照として本明細書に組み込まれる。
本開示は、一般的に、撮影に関し、より具体的には、PETスキャナーのTOFの較正システム及び方法に関する。
いくつかの実施形態において、上記の放射線源は、PETスキャナーの性能を試験するためのファントムを含む。
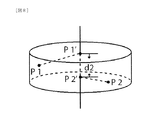
そうでなければ、光子P1及び光子P2は、同じ消滅イベントに由来する光子対として指定されず、光子P2が廃棄されてよい。

Claims (8)
- 複数の結晶素子をそれぞれ有する複数の検出器ユニットをそれぞれ有する複数の検出器リングを有するPETスキャナーを較正する方法であって、
PETスキャナーの第1の検出器ユニットと第2の検出器ユニットを接続し、前記PETスキャナー内に配置された放射線源から放射された陽電子の消滅に起因する複数の同時計数イベントに関連する同時計数線(LOR)を決定するステップと、
前記複数の同時計数イベントに基づいて前記LORの第1の飛行時間(TOF)を計算するステップと、
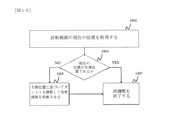
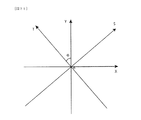
前記複数の同時計数イベントに基づいて前記放射線源の位置を決定するステップと、
前記放射線源の位置に基づいて、前記LORの第2のTOFを計算するステップであって、前記LORの第2のTOFを計算することは、
前記LOR及び前記放射線源の交差部分を決定することと、
前記交差部分の中心を決定することと、
前記交差部分の中心で発生した前記同時計数イベントに基づいて前記第2のTOFを計算することと、を含むステップと、
前記第1のTOF及び前記第2のTOFに基づいて、時間オフセットを計算するステップと、
前記時間オフセットに基づいて、前記第1の検出器ユニット及び前記第2の検出器ユニットを較正するステップと、を含むPETスキャナーを較正する方法。 - 前記第1のTOFは、前記複数の同時計数イベントのうちの各TOFの平均値である請求項1に記載の方法。
- 前記複数の同時計数イベントに基づいて前記LORの前記第1のTOFを計算することは、
前記複数の同時計数イベントの各TOFのヒストグラムを作成することと、
前記ヒストグラムの中心での時間値を計算することとを含む請求項1に記載の方法。 - 前記放射線源は、ファントムで包まれる請求項1に記載の方法。
- 複数の検出器ユニットをそれぞれ有する複数の検出器リングを有する陽電子放射断層撮影(PET)システムであって、
PETスキャナと、
前記PETスキャナー内に配置された放射線源から放射された陽電子の消滅に起因する同時計数イベントを検出する同時計数イベント検出回路と、
前記複数の検出器ユニットのうちの第1の検出器ユニットと第2の検出器ユニットを接続し、複数の同時計数イベントに関連する同時計数線(LOR)を決定し、
前記複数の同時計数イベントに基づいて前記LORの第1の飛行時間(TOF)を計算し、
前記複数の同時計数イベントに基づいて前記放射線源の位置を決定し、
前記放射線源の位置に基づいて、前記LORの第2のTOFを計算し、ここで前記放射線源の位置に基づいて前記第2のTOFを計算することは、
前記LOR及び前記放射線源の交差部分を決定することと、
前記交差部分の中心を決定することと、
前記交差部分の中心で発生した前記同時計数イベントに基づいて前記第2のTOFを計算することとを含む、
前記第1のTOF及び前記第2のTOFに基づいて、時間オフセットを計算し、
前記時間オフセットに基づいて、前記第1の検出器ユニット及び第2の検出器ユニットを較正する動作を実行するように構成されるホストコンピュータと、
を含むPETシステム。 - 前記第1のTOFは、前記複数の同時計数イベントの各TOFの平均値である請求項5に記載のPETシステム。
- 前記複数の同時計数イベントに基づいて前記LORの前記第1のTOFを計算することは、
前記複数の同時計数イベントの各TOFのヒストグラムを作成することと、
前記ヒストグラムの中心での時間値を計算することとを含む請求項5に記載のPETシステム。 - 前記放射線源は、ファントムで包まれる請求項5に記載のPETシステム。
Applications Claiming Priority (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201510603207.2A CN106539591B (zh) | 2015-09-21 | 2015-09-21 | Pet飞行时间状态质量检测方法和pet扫描装置 |
| CN201510603207.2 | 2015-09-21 | ||
| CN201510854615.5A CN105496436B (zh) | 2015-11-28 | 2015-11-28 | 用于pet装置的时间校正方法和装置 |
| CN201510854615.5 | 2015-11-28 | ||
| CN201511031899.4A CN105411618B (zh) | 2015-12-31 | 2015-12-31 | 放射源的位置调节方法及系统 |
| CN201511031899.4 | 2015-12-31 | ||
| CN201521140680.3 | 2015-12-31 | ||
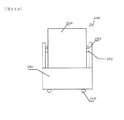
| CN201521140680.3U CN205354679U (zh) | 2015-12-31 | 2015-12-31 | 放射源转运装置 |
| PCT/CN2016/099078 WO2017050180A1 (en) | 2015-09-21 | 2016-09-14 | System and method for calibrating a pet scanner |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018535395A JP2018535395A (ja) | 2018-11-29 |
| JP6828024B2 true JP6828024B2 (ja) | 2021-02-10 |
Family
ID=58282288
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018514820A Active JP6828024B2 (ja) | 2015-09-21 | 2016-09-14 | Petスキャナーを較正するためのシステム及び方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US10663608B2 (ja) |
| EP (1) | EP3352671B1 (ja) |
| JP (1) | JP6828024B2 (ja) |
| KR (1) | KR102709104B1 (ja) |
| WO (1) | WO2017050180A1 (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8017915B2 (en) | 2008-03-14 | 2011-09-13 | Reflexion Medical, Inc. | Method and apparatus for emission guided radiation therapy |
| US10663608B2 (en) | 2015-09-21 | 2020-05-26 | Shanghai United Imaging Healthcare Co., Ltd. | System and method for calibrating a PET scanner |
| RU2018128613A (ru) * | 2016-01-07 | 2020-02-07 | Цсл Беринг Ленгнау Аг | Мутированный фактор фон виллебранда |
| CN116943051A (zh) | 2016-11-15 | 2023-10-27 | 反射医疗公司 | 放射治疗患者平台 |
| CN110234275B (zh) | 2016-11-15 | 2023-08-22 | 反射医疗公司 | 用于发射引导式高能光子传输的系统 |
| CN108109182B (zh) * | 2016-11-24 | 2021-08-24 | 上海东软医疗科技有限公司 | 一种pet图像重建方法和装置 |
| WO2018183748A1 (en) | 2017-03-30 | 2018-10-04 | Reflexion Medical, Inc. | Radiation therapy systems and methods with tumor tracking |
| WO2019014387A1 (en) | 2017-07-11 | 2019-01-17 | Reflexion Medical, Inc. | METHODS FOR MANAGING RETENTION FOR PET SENSOR |
| WO2019032911A1 (en) * | 2017-08-09 | 2019-02-14 | Reflexion Medical, Inc. | SYSTEMS AND METHODS FOR DEFECT DETECTION IN EMISSION-GUIDED RADIOTHERAPY |
| US11903749B2 (en) | 2017-10-19 | 2024-02-20 | Spectrum Dynamics Medical Limited | Nuclear medicine tomography system comprising a detector carrier housing and a heat pump configured to cool air within the detector carrier housing |
| EP3698176B1 (en) | 2017-10-19 | 2023-10-11 | Spectrum Dynamics Medical Limited | Moving parts in a nuclear medicine (n-m) imaging system |
| EP3698326A4 (en) | 2017-10-19 | 2021-08-11 | Spectrum Dynamics Medical Limited | CALIBRATION AND QUALITY CONTROL OF A RADIO IMAGING SYSTEM FOR NUCLEAR MEDICINE (N-M) |
| WO2019077542A2 (en) | 2017-10-19 | 2019-04-25 | Spectrum Dynamics Medical Limited | SAFETY MECHANISMS FOR SHORT-RANGE TOMODENSITOMETRY MACHINE AND METHODS OF USE |
| WO2019084778A1 (en) | 2017-10-31 | 2019-05-09 | Shenzhen United Imaging Healthcare Co., Ltd. | System and method for pet correction |
| US11369806B2 (en) | 2017-11-14 | 2022-06-28 | Reflexion Medical, Inc. | Systems and methods for patient monitoring for radiotherapy |
| CN108703769B (zh) * | 2018-06-14 | 2021-11-23 | 上海联影医疗科技股份有限公司 | Tof数据的校正方法、装置、系统和计算机可读存储介质 |
| US10682115B1 (en) * | 2019-05-02 | 2020-06-16 | Siemens Medical Solutions Usa, Inc. | Light weight positron emission tomography phantom |
| CN110226942A (zh) * | 2019-05-29 | 2019-09-13 | 上海联影医疗科技有限公司 | 数据显示方法、装置、pet扫描设备和存储介质 |
| CN110215227B (zh) * | 2019-06-05 | 2022-10-14 | 上海联影医疗科技股份有限公司 | 时间窗设置方法、装置、计算机设备和存储介质 |
| CN110269638B (zh) * | 2019-06-25 | 2023-07-25 | 上海联影医疗科技股份有限公司 | 图像重建方法、系统、可读存储介质和设备 |
| JP7382496B2 (ja) * | 2019-10-09 | 2023-11-16 | シーメンス メディカル ソリューションズ ユーエスエー インコーポレイテッド | Petイメージングシステムのセットアップおよび品質管理のための短軸ファントムを用いた連続寝台移動収集 |
| CN111080734B (zh) * | 2019-11-25 | 2023-10-20 | 中国科学院深圳先进技术研究院 | 一种处理正电子发射断层扫描pet数据的方法及终端 |
| CN111080737B (zh) * | 2019-12-20 | 2023-05-26 | 沈阳智核医疗科技有限公司 | 图像重建方法、装置及pet扫描系统 |
| CN114343692B (zh) * | 2020-12-30 | 2024-11-15 | 上海联影医疗科技股份有限公司 | 一种正电子发射断层成像方法和系统 |
| CN112998737B (zh) * | 2021-02-26 | 2022-08-30 | 中派科技(深圳)有限责任公司 | 一种扫描装置的时间偏移校正系统及其时间偏移校正方法 |
| CN113425320B (zh) * | 2021-06-02 | 2023-09-26 | 沈阳智核医疗科技有限公司 | 时间校准方法、装置、电子设备及存储介质 |
| CN120858298A (zh) * | 2023-03-08 | 2025-10-28 | 国立研究开发法人量子科学技术研究开发机构 | 信号处理装置、信号处理方法、信号处理程序、以及正电子发射断层摄影装置 |
| EP4455737A1 (en) * | 2023-04-25 | 2024-10-30 | Marvel Fusion GmbH | Particle detector |
| US20250172708A1 (en) * | 2023-11-27 | 2025-05-29 | Siemens Medical Solutions Usa, Inc. | Use of background radiation-based tof offsets to evaluate annihilation radiation-based tof offsets |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030212320A1 (en) | 2001-10-01 | 2003-11-13 | Michael Wilk | Coordinate registration system for dual modality imaging systems |
| US7247844B2 (en) | 2002-11-07 | 2007-07-24 | Scanwell Systems | Instrument and method to facilitate and improve the timing alignment of a pet scanner |
| DE10312253B4 (de) | 2003-03-19 | 2007-04-05 | Siemens Ag | Kühlsystem, Computertomographie-Anlage mit einem solchen Kühlsystem und Verfahren zur Kühlung einer Gantry |
| US7201515B2 (en) | 2005-03-23 | 2007-04-10 | General Electric Company | System and method for cooling components rotatable about an axis |
| US7345281B2 (en) | 2005-09-14 | 2008-03-18 | General Electric Company | Method and system for calibrating a time of flight positron emission tomography system |
| JP3942188B2 (ja) | 2005-09-30 | 2007-07-11 | 株式会社日立製作所 | 核医学診断装置、陽電子放出型断層撮影装置及び検出器ユニット |
| US7820975B2 (en) | 2006-01-03 | 2010-10-26 | Koninklijke Philips Electronics N.V. | Achieving accurate time-of-flight calibrations with a stationary coincidence point source |
| CN101297758B (zh) | 2007-04-30 | 2010-12-01 | 上海西门子医疗器械有限公司 | 计算机断层扫描系统 |
| DE102007037313B4 (de) | 2007-08-08 | 2009-11-12 | Siemens Ag | Computertomographiegerät mit einer Gantry zur Halterung von um eine Systemachse rotierbar angeordneten Komponenten eines Aufnahmesystems |
| US8282278B2 (en) | 2007-11-30 | 2012-10-09 | Koninklijke Philips Electronics N.V. | Gantry cooling |
| KR101467509B1 (ko) * | 2008-07-25 | 2014-12-01 | 삼성전자주식회사 | 이미지 센서 및 이미지 센서 동작 방법 |
| US8089043B2 (en) | 2009-12-01 | 2012-01-03 | Siemens Medical Solutions Usa, Inc. | Systems and methods for calibrating time alignment for a positron emission tomography (PET) system |
| US8455834B2 (en) | 2009-12-02 | 2013-06-04 | General Electric Company | Systems and methods for patient positioning for nuclear medicine imaging |
| JP6067959B2 (ja) * | 2010-06-17 | 2017-01-25 | 東芝メディカルシステムズ株式会社 | 核医学イメージング装置および方法 |
| US9029786B2 (en) * | 2010-06-17 | 2015-05-12 | Kabushiki Kaisha Toshiba | Nuclear medicine imaging apparatus, and nuclear medicine imaging method |
| JP5672061B2 (ja) | 2011-02-24 | 2015-02-18 | 株式会社島津製作所 | 陽電子放射断層撮像装置 |
| US8483992B2 (en) | 2011-04-28 | 2013-07-09 | Kabushiki Kaisha Toshiba | Analytical computation of geometric normalization factor for TOF-PET |
| US20120303178A1 (en) | 2011-05-26 | 2012-11-29 | Hendry Jeffrey C | Method and system for establishing user settings of vehicle components |
| US20130123602A1 (en) | 2011-11-16 | 2013-05-16 | General Electric Company | Method and system for automatically positioning a structure within a field of view |
| US10831859B2 (en) | 2012-11-07 | 2020-11-10 | Ford Global Technologies, Llc | Hardware and controls for personal vehicle rental |
| KR101912715B1 (ko) * | 2012-11-20 | 2018-10-29 | 삼성전자주식회사 | 방사선이 방출된 위치의 분포를 추정하는 방법 및 장치 |
| US8796637B1 (en) | 2013-05-24 | 2014-08-05 | Kabushiki Kaisha Toshiba | Timing calibration for time-of-flight (TOF) PET using positron-emitting isotopes and annihilation targets |
| PL223751B1 (pl) | 2013-08-30 | 2016-10-31 | Univ Jagiellonski | Sposób kalibracji detektorów TOF-PET przy wykorzystaniu promieniowania kosmicznego |
| CN104434160B (zh) | 2013-09-18 | 2017-11-28 | 上海联影医疗科技有限公司 | Pet扫描装置及其时间偏移校正方法 |
| CN106575454A (zh) | 2014-06-11 | 2017-04-19 | 威尔蒂姆Ip公司 | 基于生物特征信息帮助用户访问车辆的系统和方法 |
| CN104644204A (zh) | 2015-02-09 | 2015-05-27 | 中国船舶重工集团公司第七一九研究所 | 一种数字pet的时间校正方法及系统 |
| CN105193441B (zh) | 2015-08-17 | 2018-03-13 | 中国科学院高能物理研究所 | 一种放射性点源定位方法及系统 |
| CN105496436B (zh) | 2015-11-28 | 2018-06-19 | 上海联影医疗科技有限公司 | 用于pet装置的时间校正方法和装置 |
| US10663608B2 (en) | 2015-09-21 | 2020-05-26 | Shanghai United Imaging Healthcare Co., Ltd. | System and method for calibrating a PET scanner |
| CN105411618B (zh) * | 2015-12-31 | 2018-11-09 | 上海联影医疗科技有限公司 | 放射源的位置调节方法及系统 |
-
2016
- 2016-06-02 US US15/171,877 patent/US10663608B2/en active Active
- 2016-09-14 JP JP2018514820A patent/JP6828024B2/ja active Active
- 2016-09-14 EP EP16848062.2A patent/EP3352671B1/en active Active
- 2016-09-14 WO PCT/CN2016/099078 patent/WO2017050180A1/en not_active Ceased
- 2016-09-14 KR KR1020187010475A patent/KR102709104B1/ko active Active
-
2020
- 2020-05-25 US US16/882,556 patent/US11619755B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20200284928A1 (en) | 2020-09-10 |
| US11619755B2 (en) | 2023-04-04 |
| EP3352671A1 (en) | 2018-08-01 |
| KR20180056679A (ko) | 2018-05-29 |
| KR102709104B1 (ko) | 2024-09-25 |
| EP3352671B1 (en) | 2020-07-22 |
| US10663608B2 (en) | 2020-05-26 |
| US20170082759A1 (en) | 2017-03-23 |
| WO2017050180A1 (en) | 2017-03-30 |
| EP3352671A4 (en) | 2018-10-03 |
| JP2018535395A (ja) | 2018-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6828024B2 (ja) | Petスキャナーを較正するためのシステム及び方法 | |
| CN106539591B (zh) | Pet飞行时间状态质量检测方法和pet扫描装置 | |
| JP6933703B2 (ja) | イメージングシステムおよび校正方法 | |
| CN107693037B (zh) | Pet扫描装置及其时间偏移校正方法 | |
| Tashima et al. | 3D Compton image reconstruction method for whole gamma imaging | |
| US7039227B2 (en) | PET device and image generating method for pet device | |
| JP5984246B2 (ja) | 陽電子放出コンピュータ断層撮影装置、陽電子放出コンピュータ断層撮影装置に実行させるためのプログラム、及び陽電子放出コンピュータ断層撮影装置によって実行される方法 | |
| EP3035038B1 (en) | High-resolution computed tomography | |
| JP6188418B2 (ja) | 偶発イベント削減方法、偶発イベント削減装置及び非一時的コンピュータ可読記憶媒体 | |
| Shao et al. | Development of a prototype PET scanner with depth-of-interaction measurement using solid-state photomultiplier arrays and parallel readout electronics | |
| CN101365962A (zh) | 对正电子发射断层摄影的飞行时间测量中所利用的符合计时进行校准 | |
| CN107137101A (zh) | 一种时间校准方法和装置 | |
| CN112998735B (zh) | 一种扫描装置重建图像的系统和方法 | |
| US20120267536A1 (en) | Pet imaging system including detector elements of different design and performance | |
| JP6670643B2 (ja) | Pet装置 | |
| Stolin et al. | Preclinical positron emission tomography scanner based on a monolithic annulus of scintillator: initial design study | |
| CN112998737B (zh) | 一种扫描装置的时间偏移校正系统及其时间偏移校正方法 | |
| Cho et al. | Development of positron emission tomography with wobbling and zooming for high sensitivity and high-resolution molecular imaging | |
| US20150238161A1 (en) | Registration of 4th generation detectors relative to the 3rd generation ct system coordinates using 4th generation sinogram data | |
| US20230243988A1 (en) | System and method for calibrating a pet scanner | |
| US20140161335A1 (en) | Method and apparatus for generating system response of scanner of imaging apparatus | |
| CN112998736B (zh) | 一种扫描装置的时间校正系统及其时间校正方法 | |
| Singh et al. | Technical NEMA NU2–2018 performance assessment of time-of-flight-integrated digital PET-CT system | |
| Saha | Data Acquisition and Corrections | |
| Uribe et al. | Coincidence Time Correction (CTC) method for TOF-PET scanners with correction to account for misalignment of calibration phantom |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190823 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200717 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200804 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20201102 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210120 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6828024 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |