JP6828655B2 - 自車位置推定装置 - Google Patents
自車位置推定装置 Download PDFInfo
- Publication number
- JP6828655B2 JP6828655B2 JP2017203728A JP2017203728A JP6828655B2 JP 6828655 B2 JP6828655 B2 JP 6828655B2 JP 2017203728 A JP2017203728 A JP 2017203728A JP 2017203728 A JP2017203728 A JP 2017203728A JP 6828655 B2 JP6828655 B2 JP 6828655B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- lane marking
- image
- distance
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Description
図1に示すように、自車位置推定装置100は、装置を統括的に管理するECU[Electronic Control Unit]10を備えている。ECU10は、CPU[Central Processing Unit]、ROM[Read Only Memory]、RAM[Random Access Memory]、CAN[Controller Area Network]通信回路などを有する電子制御ユニットである。ECU10では、例えば、ROMに記憶されているプログラムをRAMにロードし、RAMにロードされたプログラムをCPUで実行することにより各種の機能を実現する。ECU10は、複数の電子ユニットから構成されていてもよい。
以下、自車位置推定装置100の自車位置推定処理について図6を参照して説明する。図6は、自車位置推定処理を示すフローチャートである。図6に示すフローチャートは,例えば、車両Mの走行中に実行される。なお、測定位置取得部11による車両Mの測定位置の取得は随時行われているものとする。
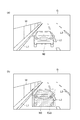
以上説明した一実施形態に係る自車位置推定装置100によれば、壁や他車両などの物体が撮像画像に含まれる場合には、物体に対応する画像情報を除外して区画線の認識を行うので、他車両のボディの横線などを誤って区画線として認識することが避けられ、自車位置を適切に推定することができる。
Claims (1)
- 車両の地図上の自車位置を推定する自車位置推定装置であって、
道路の区画線の位置情報を含む地図情報を記憶している地図データベースと、
前記車両の周囲を撮像するカメラの撮像画像に基づいて、前記車両の周囲の区画線を認識する区画線認識部と、
前記車両のレーダセンサの検出結果に基づいて、前記車両の周囲の物体を認識する物体認識部と、
前記区画線認識部の認識した前記区画線と前記地図情報に含まれる前記区画線の位置情報とに基づいて、前記車両の前記自車位置を推定する自車位置推定部と、
前記物体と前記区画線との距離が距離閾値以上であるか否かを判定する距離判定部と、
を備え、
前記区画線認識部は、前記撮像画像に前記物体の画像が含まれる場合において、前記距離判定部により前記物体と前記区画線との距離が距離閾値以上であると判定されたときに、前記物体に対応する画像情報を除外して前記車両の周囲の区画線の認識を行い、前記距離判定部により前記物体と前記区画線との距離が前記距離閾値未満であると判定されたときには前記物体に対応する画像情報を除外せずに前記車両の周囲の区画線の認識を行う、自車位置推定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017203728A JP6828655B2 (ja) | 2017-10-20 | 2017-10-20 | 自車位置推定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017203728A JP6828655B2 (ja) | 2017-10-20 | 2017-10-20 | 自車位置推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019078562A JP2019078562A (ja) | 2019-05-23 |
| JP6828655B2 true JP6828655B2 (ja) | 2021-02-10 |
Family
ID=66627638
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017203728A Active JP6828655B2 (ja) | 2017-10-20 | 2017-10-20 | 自車位置推定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6828655B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7173062B2 (ja) | 2020-01-23 | 2022-11-16 | トヨタ自動車株式会社 | 変化点検出装置及び地図情報配信システム |
| WO2021208110A1 (zh) * | 2020-04-18 | 2021-10-21 | 华为技术有限公司 | 车道线识别异常事件确定方法、车道线识别装置及系统 |
| WO2022071315A1 (ja) * | 2020-09-30 | 2022-04-07 | 学校法人明治大学 | 自律移動体制御装置、自律移動体制御方法及びプログラム |
| US11703586B2 (en) * | 2021-03-11 | 2023-07-18 | Qualcomm Incorporated | Position accuracy using sensor data |
| JP2022139830A (ja) * | 2021-03-12 | 2022-09-26 | 株式会社豊田自動織機 | 自律走行車 |
| JP7548087B2 (ja) * | 2021-03-19 | 2024-09-10 | 株式会社豊田自動織機 | 自律走行車 |
| WO2025134318A1 (ja) * | 2023-12-21 | 2025-06-26 | 日産自動車株式会社 | 画像生成方法及び画像生成装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4648697B2 (ja) * | 2004-12-27 | 2011-03-09 | アイシン・エィ・ダブリュ株式会社 | 画像認識装置及び方法、ナビゲーション装置 |
| JP6380422B2 (ja) * | 2016-02-05 | 2018-08-29 | トヨタ自動車株式会社 | 自動運転システム |
| JP6604240B2 (ja) * | 2016-03-08 | 2019-11-13 | アイシン・エィ・ダブリュ株式会社 | 自動運転支援装置及びコンピュータプログラム |
-
2017
- 2017-10-20 JP JP2017203728A patent/JP6828655B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019078562A (ja) | 2019-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6828655B2 (ja) | 自車位置推定装置 | |
| US11631257B2 (en) | Surroundings recognition device, and surroundings recognition method | |
| CN109752741B (zh) | 车辆定位设备 | |
| US11092442B2 (en) | Host vehicle position estimation device | |
| CN110470309B (zh) | 本车位置推断装置 | |
| US20190073540A1 (en) | Vehicle control device, vehicle control method, and storage medium | |
| JP7074438B2 (ja) | 自車位置推定装置 | |
| JP7143722B2 (ja) | 自車位置推定装置 | |
| JP6323402B2 (ja) | 車線内走行制御装置、車線内走行制御方法 | |
| US12033403B2 (en) | Vehicle control device, vehicle control method, and storage medium | |
| JP6189815B2 (ja) | 走行区画線認識システム | |
| JP6626410B2 (ja) | 自車位置特定装置、自車位置特定方法 | |
| US11042759B2 (en) | Roadside object recognition apparatus | |
| JP6449627B2 (ja) | 走行区画線認識装置 | |
| JP6520740B2 (ja) | 物体検出方法、物体検出装置、およびプログラム | |
| WO2015087502A1 (ja) | 自車位置検出装置 | |
| US20220306150A1 (en) | Control device, control method, and storage medium | |
| US20170225681A1 (en) | Driving support apparatus, server, and non-transitory computer-readable medium | |
| JP2020020690A (ja) | 自車位置推定装置 | |
| CN115050205A (zh) | 地图生成装置以及位置识别装置 | |
| WO2017013692A1 (ja) | 走行車線判定装置及び走行車線判定方法 | |
| JP7182963B2 (ja) | 移動体検知システム及び移動体検知方法 | |
| US11867526B2 (en) | Map generation apparatus | |
| US20260070554A1 (en) | Mobile object control device, mobile object control method, and storage medium | |
| JP2023151308A (ja) | 先行車両判定方法及び先行車両判定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200715 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200721 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200911 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201222 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210104 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6828655 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |