JP6835964B2 - 自律車両センサ用のポッドの接続 - Google Patents
自律車両センサ用のポッドの接続 Download PDFInfo
- Publication number
- JP6835964B2 JP6835964B2 JP2019526311A JP2019526311A JP6835964B2 JP 6835964 B2 JP6835964 B2 JP 6835964B2 JP 2019526311 A JP2019526311 A JP 2019526311A JP 2019526311 A JP2019526311 A JP 2019526311A JP 6835964 B2 JP6835964 B2 JP 6835964B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- sensor unit
- sensor
- data bus
- autonomous
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
- B60R16/023—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements for transmission of signals between vehicle parts or subsystems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
- B60R16/03—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements for supply of electrical power to vehicle subsystems or for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R9/00—Supplementary fittings on vehicle exterior for carrying loads, e.g. luggage, sports gear or the like
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0011—Planning or execution of driving tasks involving control alternatives for a single driving scenario, e.g. planning several paths to avoid obstacles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0255—Control of position or course in two dimensions specially adapted to land vehicles using acoustic signals, e.g. ultra-sonic singals
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Transportation (AREA)
- Acoustics & Sound (AREA)
- Electromagnetism (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
- Business, Economics & Management (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
[0001] 本出願は、2016年11月29日に出願された米国特許出願第15/363,212号に付与された優先権を主張し、前出の特許出願はこれにより参照によって完全な形で組み込まれる。
Claims (14)
- 車両制御命令に基づいて車両を自律制御するように構成された制御システムと、
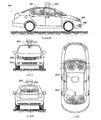
センサユニットを前記車両に結合することを可能にするように構成された、前記車両の屋根に結合されたコネクタと、を備え、前記コネクタは、
電源接続部と、
前記センサユニットから熱を除去するように構成された熱接続部と、
データバスと、を備え、前記データバスは前記制御システムに結合され、前記センサユニットから前記制御システムに前記車両制御命令を提供するように構成され、
前記車両制御命令は、前記センサユニットに局所的に配置された処理システムが、前記センサユニットに対応する複数のセンサからのセンサデータを用いてセンサの融合を実行することに基づいて、前記処理システムによって決定され、
前記処理システムは、前記車両が前記車両制御命令に基づいて自律的に動作することを可能にする、
車両システム。 - 前記データバスが、前記センサユニットから前記制御システムへセンサデータを提供するように構成される、請求項1に記載の車両システム。
- 前記車両の環境内の物体を確認し、
前記データバスを介して前記確認された物体に基づく制御信号を前記車両に伝達する ように構成された変換ユニットをさらに備える、請求項1に記載の車両システム。 - 前記変換ユニットが、前記電源接続部によって提供された電圧を前記センサユニットの少なくとも1つの電圧に変換するようにさらに構成される、請求項3に記載の車両システム。
- 前記コネクタが、前記センサユニットを前記車両に取り外し可能に結合するように構成される、請求項1に記載の車両システム。
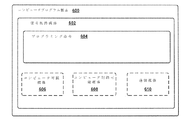
- センサユニットであって、
車両の環境を感知するように構成された複数のセンサと、
前記複数のセンサからのセンサデータを用いてセンサの融合を実行することに基づいて車両制御命令を決定するように構成された処理システムであって、前記車両が前記車両制御命令に基づいて自律的に動作することを可能にする処理システムと、
前記センサユニットを前記車両に結合するように構成された前記センサユニットの結合部と、を備え、前記結合部が、
電源接続部と、
前記センサユニットから熱を除去するように構成された熱接続部と、
データバスと、を備え、前記データバスは前記車両の制御システムへ前記車両制御命令を提供するように構成される、
センサユニット。 - 前記車両の前記環境内の物体を確認し、
前記データバスを介して前記確認された物体に基づく制御信号を前記車両に伝達する
ように構成された変換ユニットをさらに備える、請求項6に記載のセンサユニット。 - 前記変換ユニットが、前記電源接続部によって提供された電圧を前記センサユニットの少なくとも1つの電圧に変換するようにさらに構成される、請求項7に記載のセンサユニット。
- 前記結合部が、前記センサユニットを前記車両に取り外し可能に結合するように構成される、請求項6に記載のセンサユニット。
- 前記データバスが、前記センサユニットから前記車両の前記制御システムへセンサデータを提供するように構成される、請求項6に記載のセンサユニット。
- 車両制御命令に基づいて車両を自律制御するように構成された制御システムを提供すること、および
センサユニットを前記車両に結合することを可能にするように構成された、前記車両の屋根に結合されたコネクタを提供することを含み、前記コネクタは、
電源接続部と、
前記センサユニットから熱を除去するように構成された熱接続部と、
データバスと、を備え、前記データバスは前記制御システムに結合され、前記センサユニットから前記制御システムに前記車両制御命令を提供するように構成され、
前記車両制御命令は、前記センサユニットに局所的に配置された処理システムが、前記センサユニットに対応する複数のセンサからのセンサデータを用いてセンサの融合を実行することに基づいて、前記処理システムによって決定され、前記処理システムは、前記車両が前記車両制御命令に基づいて自律的に動作することを可能にする、方法。 - 前記車両の環境内の物体を確認し、
前記データバスを介して前記確認された物体に基づく制御信号を前記車両に伝達する
ように構成された変換ユニットを提供することをさらに含む、請求項11に記載の方法。 - 前記変換ユニットが、前記電源接続部によって提供された電圧を前記センサユニットの少なくとも1つの電圧に変換するようにさらに構成される、請求項12に記載の方法。
- 前記データバスが、前記センサユニットから前記車両の前記制御システムへセンサデータを提供するように構成される、請求項11に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/363,212 | 2016-11-29 | ||
| US15/363,212 US20180150083A1 (en) | 2016-11-29 | 2016-11-29 | Pod connection for Autonomous Vehicle Sensors |
| PCT/US2017/063628 WO2018102363A1 (en) | 2016-11-29 | 2017-11-29 | Pod connection for autonomous vehicle sensors |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020504690A JP2020504690A (ja) | 2020-02-13 |
| JP6835964B2 true JP6835964B2 (ja) | 2021-02-24 |
Family
ID=60703144
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019526311A Active JP6835964B2 (ja) | 2016-11-29 | 2017-11-29 | 自律車両センサ用のポッドの接続 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20180150083A1 (ja) |
| EP (2) | EP4552928A3 (ja) |
| JP (1) | JP6835964B2 (ja) |
| KR (2) | KR102377766B1 (ja) |
| CN (1) | CN110023144A (ja) |
| WO (1) | WO2018102363A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10150432B2 (en) * | 2017-03-20 | 2018-12-11 | Ford Global Technologies, Llc | Autonomous vehicle conversion |
| US10359303B1 (en) * | 2018-02-09 | 2019-07-23 | Ford Global Technologies, Llc | System for vehicle sensor assembly |
| CN110758400A (zh) * | 2018-07-27 | 2020-02-07 | 郑州宇通客车股份有限公司 | 一种智能驾驶车辆的控制方法及装置 |
| DK3849150T3 (da) | 2018-09-04 | 2023-04-03 | Byd Co Ltd | Sikker åben api til et køretøj |
| US10706619B2 (en) | 2018-09-12 | 2020-07-07 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods for extending detachable automobile sensor capabilities for environmental mapping |
| US10730514B2 (en) * | 2018-09-12 | 2020-08-04 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods for extending detachable automobile sensor capabilities for collision avoidance |
| US11240941B2 (en) * | 2018-09-12 | 2022-02-01 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous vehicle lidar cooling system |
| US11163312B2 (en) | 2018-11-02 | 2021-11-02 | Aurora Operations, Inc. | Removable automotive LIDAR data collection POD |
| US11408984B2 (en) | 2019-05-08 | 2022-08-09 | Ford Global Technologies, Llc | Sensor-drainage apparatus |
| US10632942B1 (en) * | 2019-09-30 | 2020-04-28 | Aurora Innovation, Inc. | Autonomous vehicle sensor interface |
| JP2021105602A (ja) * | 2019-12-27 | 2021-07-26 | パイオニア株式会社 | ライダ装置 |
| US11522836B2 (en) * | 2020-02-25 | 2022-12-06 | Uatc, Llc | Deterministic container-based network configurations for autonomous vehicles |
| US11460546B2 (en) * | 2020-03-09 | 2022-10-04 | Ford Global Technologies, Llc | Sensor-drainage apparatus |
| USD1014398S1 (en) | 2021-12-23 | 2024-02-13 | Waymo Llc | Vehicle |
| USD1018337S1 (en) | 2021-12-23 | 2024-03-19 | Waymo Llc | Sensor assembly |
| JP7825525B2 (ja) * | 2022-06-30 | 2026-03-06 | フォルシアクラリオン・エレクトロニクス株式会社 | デバイス制御装置及びデバイス制御方法 |
| US12441255B2 (en) | 2022-12-15 | 2025-10-14 | Ford Global Technologies, Llc | Sensor assembly including mounting bracket fused to vehicle body |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5499182A (en) * | 1994-12-07 | 1996-03-12 | Ousborne; Jeffrey | Vehicle driver performance monitoring system |
| JPH08339864A (ja) * | 1995-06-13 | 1996-12-24 | Fuji Facom Corp | 放熱形コネクタ |
| US6086131A (en) * | 1999-03-24 | 2000-07-11 | Donnelly Corporation | Safety handle for trunk of vehicle |
| US6789013B2 (en) * | 2001-04-24 | 2004-09-07 | Navman Nz Limited | Vehicle activity tracking |
| ITVI20020212A1 (it) * | 2002-10-15 | 2004-04-16 | Calearo Srl | Antenna veicolare a schermatura perfezionata. |
| US7191269B2 (en) * | 2003-07-30 | 2007-03-13 | Delphi Technologies, Inc. | Method for multiple sensors to communicate on a uni-directional bus |
| EP1508776A1 (en) * | 2003-08-18 | 2005-02-23 | Saab Ab | Autonomous velocity estimation and navigation |
| US20090152943A1 (en) * | 2007-12-17 | 2009-06-18 | Wael William Diab | Method and system for vehicular power distribution utilizing power over ethernet |
| US8126642B2 (en) * | 2008-10-24 | 2012-02-28 | Gray & Company, Inc. | Control and systems for autonomously driven vehicles |
| DE102009051605B4 (de) * | 2009-11-02 | 2022-08-18 | Continental Automotive Gmbh | Hochintegrierte Multiband-Finnenantenne für ein Fahrzeug |
| CN102141621B (zh) * | 2011-01-06 | 2015-05-06 | 同致电子科技(厦门)有限公司 | 一种串联结构无主机泊车雷达系统的感测器定位方法 |
| US20120210730A1 (en) * | 2011-02-23 | 2012-08-23 | Raytheon Company | Method and Apparatus for Cooling a Vehicle Component |
| US8793046B2 (en) * | 2012-06-01 | 2014-07-29 | Google Inc. | Inferring state of traffic signal and other aspects of a vehicle's environment based on surrogate data |
| US9383753B1 (en) * | 2012-09-26 | 2016-07-05 | Google Inc. | Wide-view LIDAR with areas of special attention |
| US9121703B1 (en) * | 2013-06-13 | 2015-09-01 | Google Inc. | Methods and systems for controlling operation of a laser device |
| US9425654B2 (en) * | 2013-09-30 | 2016-08-23 | Google Inc. | Contactless electrical coupling for a rotatable LIDAR device |
| DE102015105528A1 (de) * | 2015-04-10 | 2016-10-13 | Connaught Electronics Ltd. | Kamera für ein Kraftfahrzeug mit thermischer Verbindungseinrichtung, Fahrerassistenzsystem, Kraftfahrzeug sowie Verfahren |
| CN204870799U (zh) * | 2015-06-17 | 2015-12-16 | 深圳市金狼星电子有限公司 | 一种车载摄像头 |
| US10288458B2 (en) * | 2016-06-29 | 2019-05-14 | GM Global Technology Operations LLC | Systems and methods for sensor platform |
-
2016
- 2016-11-29 US US15/363,212 patent/US20180150083A1/en not_active Abandoned
-
2017
- 2017-11-29 EP EP25166740.8A patent/EP4552928A3/en active Pending
- 2017-11-29 WO PCT/US2017/063628 patent/WO2018102363A1/en not_active Ceased
- 2017-11-29 EP EP17817520.4A patent/EP3526078B1/en active Active
- 2017-11-29 JP JP2019526311A patent/JP6835964B2/ja active Active
- 2017-11-29 KR KR1020217019155A patent/KR102377766B1/ko active Active
- 2017-11-29 CN CN201780073934.XA patent/CN110023144A/zh active Pending
- 2017-11-29 KR KR1020197018484A patent/KR102269543B1/ko not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP4552928A3 (en) | 2025-07-30 |
| US20180150083A1 (en) | 2018-05-31 |
| KR20210079415A (ko) | 2021-06-29 |
| KR20190085548A (ko) | 2019-07-18 |
| KR102269543B1 (ko) | 2021-06-29 |
| EP4552928A2 (en) | 2025-05-14 |
| EP3526078B1 (en) | 2025-04-16 |
| CN110023144A (zh) | 2019-07-16 |
| EP3526078A1 (en) | 2019-08-21 |
| JP2020504690A (ja) | 2020-02-13 |
| KR102377766B1 (ko) | 2022-03-23 |
| WO2018102363A1 (en) | 2018-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6835964B2 (ja) | 自律車両センサ用のポッドの接続 | |
| US12561986B2 (en) | Vision-based indicator signal detection using spatiotemporal filtering | |
| JP7058726B2 (ja) | レーダ技術を使用した自律車両の動きの検出 | |
| AU2018301762B2 (en) | Methods and systems for vehicle occupancy confirmation | |
| US12250476B2 (en) | Adjustable vertical field of view | |
| US20180113210A1 (en) | Mountable Radar System |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190709 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200917 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200930 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201224 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210128 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210204 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6835964 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |