JP6841502B2 - 通信装置、基地局選択方法および基地局選択プログラム - Google Patents
通信装置、基地局選択方法および基地局選択プログラム Download PDFInfo
- Publication number
- JP6841502B2 JP6841502B2 JP2017060587A JP2017060587A JP6841502B2 JP 6841502 B2 JP6841502 B2 JP 6841502B2 JP 2017060587 A JP2017060587 A JP 2017060587A JP 2017060587 A JP2017060587 A JP 2017060587A JP 6841502 B2 JP6841502 B2 JP 6841502B2
- Authority
- JP
- Japan
- Prior art keywords
- base station
- cell
- communication device
- moving
- relative position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
- Mobile Radio Communication Systems (AREA)
Description

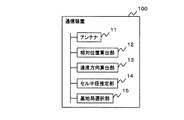
12 相対位置算出部
13 速度方向算出部
14 セル半径推定部
100 通信装置
200〜500 基地局
Claims (7)
- 基地局から送信された電波を受信する多次元アンテナと、
前記多次元アンテナで受信された電波の受信時間および受信電力の差異から、移動する自通信装置と前記基地局との相対位置を算出する相対位置算出部と、
時系列に複数回算出された相対位置の各差分から、前記基地局と自通信装置との相対的な移動速度および移動方向を算出する速度方向算出部と、
前記移動速度が所定の速度を超える場合に、前記移動方向のセルに対応する基地局をハンドオーバ先の基地局として選択する基地局選択部と、
算出された相対位置および受信電力から、基地局のセル半径を推定するセル半径推定部とを備え、
前記基地局選択部は、推定されたセル半径が所定の大きさ以上のセルに対応する基地局をハンドオーバ先の基地局として選択する
ことを特徴とする通信装置。 - 基地局選択部は、電波飛来方向が一番近い方向のセルに対応する基地局をハンドオーバ先の基地局として選択する
請求項1記載の通信装置。 - 基地局選択部は、一定角度内に収まるセルに対応する基地局を選択する
請求項1または請求項2記載の通信装置。 - 基地局選択部は、電波の受信電力および受信品質が予め定めた閾値を超えるセルに対応する基地局を選択する
請求項1から請求項3のうちのいずれか1項に記載の通信装置。 - 多次元アンテナは、少なくとも4つ以上の受信アンテナまたは2つ以上の平面アレイアンテナである
請求項1から請求項4のうちのいずれか1項に記載の通信装置。 - 基地局から送信された電波を多次元アンテナで受信し、
前記多次元アンテナで受信された電波の受信時間および受信電力の差異から、移動する通信装置と前記基地局との相対位置を算出し、
算出された相対位置および受信電力から、基地局のセル半径を推定し、
時系列に複数回算出された相対位置の各差分から、前記基地局と前記通信装置との相対的な移動速度および移動方向を算出し、
前記移動速度が所定の速度を超える場合に、前記移動方向のセルに対応し、かつ、推定されたセル半径が所定の大きさ以上のセルに対応する基地局をハンドオーバ先の基地局として選択する
ことを特徴とする基地局選択方法。 - コンピュータに、
多次元アンテナで受信された基地局からの電波の受信時間および受信電力の差異から、移動する自コンピュータと当該基地局との相対位置を算出する相対位置算出処理、
時系列に複数回算出された相対位置の各差分から、前記基地局と自コンピュータとの相対的な移動速度および移動方向を算出する速度方向算出処理、
前記移動速度が所定の速度を超える場合に、前記移動方向のセルに対応する基地局をハンドオーバ先の基地局として選択する基地局選択処理、および、
算出された相対位置および受信電力から、基地局のセル半径を推定するセル半径推定処理を実行させ、
前記基地局選択処理で、推定されたセル半径が所定の大きさ以上のセルに対応する基地局をハンドオーバ先の基地局として選択させる
を実行させるための基地局選択プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017060587A JP6841502B2 (ja) | 2017-03-27 | 2017-03-27 | 通信装置、基地局選択方法および基地局選択プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017060587A JP6841502B2 (ja) | 2017-03-27 | 2017-03-27 | 通信装置、基地局選択方法および基地局選択プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018164202A JP2018164202A (ja) | 2018-10-18 |
| JP6841502B2 true JP6841502B2 (ja) | 2021-03-10 |
Family
ID=63860312
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017060587A Active JP6841502B2 (ja) | 2017-03-27 | 2017-03-27 | 通信装置、基地局選択方法および基地局選択プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6841502B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6896789B2 (ja) * | 2019-05-08 | 2021-06-30 | ソフトバンク株式会社 | 制御装置、プログラム、システム、及び制御方法 |
| JP7354810B2 (ja) * | 2019-12-04 | 2023-10-03 | 株式会社デンソー | 通信システム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2003301004A1 (en) * | 2002-12-16 | 2004-07-22 | Matsushita Electric Industrial Co., Ltd. | Using multiple receive antennas to determine the location of a transmitter with respect to a receiver in ultra wideband systems |
| JP2007329680A (ja) * | 2006-06-07 | 2007-12-20 | Sony Ericsson Mobilecommunications Japan Inc | 無線通信端末装置、及びその制御方法 |
| JP4795257B2 (ja) * | 2007-01-26 | 2011-10-19 | 京セラ株式会社 | 無線通信方法および無線通信端末 |
| JP2013225944A (ja) * | 2013-08-07 | 2013-10-31 | Hitachi Ltd | 基地局、無線通信システム |
-
2017
- 2017-03-27 JP JP2017060587A patent/JP6841502B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018164202A (ja) | 2018-10-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3860192B1 (en) | Measurement method and device | |
| EP3668205A1 (en) | Positioning and measurement reporting method and apparatus | |
| US6708036B2 (en) | Methods and systems for adjusting sectors across coverage cells | |
| CN114223170B (zh) | 按需定位的方法和设备 | |
| US11782121B2 (en) | Method and device for positioning utilizing beam information | |
| US10091757B2 (en) | Base-station control apparatus and position estimation method | |
| EP2533569B1 (en) | Method for identifying missing neighbors and for updating current neighbors in wireless networks | |
| US20130143588A1 (en) | System and methods of mobile geolocation | |
| US9949227B2 (en) | Location determination | |
| US20160255548A1 (en) | Triggering pilot transmission for mobility measurements | |
| EP3659376B1 (en) | Method for detection of wireless broadband coverage holes | |
| WO2013170226A1 (en) | Method and system for auditing and correcting cellular antenna coverage patterns | |
| US20160309537A1 (en) | Probe Response Suppression | |
| US20180041868A1 (en) | Proximity based positioning in a wireless communications network | |
| US20170336494A1 (en) | Calibration-Free Location Determination Using Wireless Communication | |
| EP3681215B1 (en) | Method and device for sending positioning signal | |
| US20170142680A1 (en) | Techniques for determining a device location | |
| CN115175310A (zh) | 移动终端的定位方法、处理设备及存储介质 | |
| JP6841502B2 (ja) | 通信装置、基地局選択方法および基地局選択プログラム | |
| EP2934052A1 (en) | Method, base station, system and computer-readable medium to localize a user device | |
| WO2015029849A1 (ja) | 無線基地局装置、及び送信電力決定方法 | |
| US20130124139A1 (en) | Method and a network node for localization of a user equipment | |
| WO2018121439A1 (zh) | 一种直射径判断方法及装置 | |
| KR20100135503A (ko) | 무선통신 시스템에서 핸드오버 결정 방법 및 장치 | |
| JP6570469B2 (ja) | 通信装置、制御方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201102 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201117 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210119 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210210 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6841502 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |