JP6843159B2 - サーマルアブレーションにおける損傷の成長をモニタリングするための反射せん断波の使用 - Google Patents
サーマルアブレーションにおける損傷の成長をモニタリングするための反射せん断波の使用 Download PDFInfo
- Publication number
- JP6843159B2 JP6843159B2 JP2018563917A JP2018563917A JP6843159B2 JP 6843159 B2 JP6843159 B2 JP 6843159B2 JP 2018563917 A JP2018563917 A JP 2018563917A JP 2018563917 A JP2018563917 A JP 2018563917A JP 6843159 B2 JP6843159 B2 JP 6843159B2
- Authority
- JP
- Japan
- Prior art keywords
- boundary
- displacement field
- directional
- shear wave
- displacement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000006378 damage Effects 0.000 title claims description 50
- 238000002679 ablation Methods 0.000 title description 20
- 238000006073 displacement reaction Methods 0.000 claims description 101
- 238000012545 processing Methods 0.000 claims description 32
- 238000000034 method Methods 0.000 claims description 27
- 230000002441 reversible effect Effects 0.000 claims description 25
- 230000001902 propagating effect Effects 0.000 claims description 22
- 238000003384 imaging method Methods 0.000 claims description 20
- 238000001914 filtration Methods 0.000 claims description 12
- 230000002123 temporal effect Effects 0.000 claims description 9
- 238000002604 ultrasonography Methods 0.000 claims description 9
- 239000000523 sample Substances 0.000 claims description 8
- 238000004422 calculation algorithm Methods 0.000 claims description 7
- 238000005259 measurement Methods 0.000 claims description 5
- 230000003252 repetitive effect Effects 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 13
- 238000001514 detection method Methods 0.000 description 11
- 238000012544 monitoring process Methods 0.000 description 10
- 208000027418 Wounds and injury Diseases 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 9
- 208000014674 injury Diseases 0.000 description 9
- 238000013459 approach Methods 0.000 description 7
- 238000002091 elastography Methods 0.000 description 6
- 230000003287 optical effect Effects 0.000 description 5
- 238000002099 shear wave elastography Methods 0.000 description 5
- 206010028980 Neoplasm Diseases 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 238000003491 array Methods 0.000 description 3
- 230000014509 gene expression Effects 0.000 description 3
- 230000033001 locomotion Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000000717 retained effect Effects 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 238000010317 ablation therapy Methods 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 210000004185 liver Anatomy 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 238000012285 ultrasound imaging Methods 0.000 description 2
- 238000012800 visualization Methods 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 206010019695 Hepatic neoplasm Diseases 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 238000001574 biopsy Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 230000003139 buffering effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000005345 coagulation Methods 0.000 description 1
- 230000015271 coagulation Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 238000002592 echocardiography Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 210000001035 gastrointestinal tract Anatomy 0.000 description 1
- 238000013275 image-guided biopsy Methods 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 238000012417 linear regression Methods 0.000 description 1
- 208000014018 liver neoplasm Diseases 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000017074 necrotic cell death Effects 0.000 description 1
- 238000001208 nuclear magnetic resonance pulse sequence Methods 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 238000007674 radiofrequency ablation Methods 0.000 description 1
- 238000002271 resection Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000007669 thermal treatment Methods 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Clinical applications
- A61B8/0833—Clinical applications involving detecting or locating foreign bodies or organic structures
- A61B8/085—Clinical applications involving detecting or locating foreign bodies or organic structures for locating body or organic structures, e.g. tumours, calculi, blood vessels, nodules
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/485—Diagnostic techniques involving measuring strain or elastic properties
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52019—Details of transmitters
- G01S7/5202—Details of transmitters for pulse systems
- G01S7/52022—Details of transmitters for pulse systems using a sequence of pulses, at least one pulse manipulating the transmissivity or reflexivity of the medium
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52023—Details of receivers
- G01S7/52025—Details of receivers for pulse systems
- G01S7/52026—Extracting wanted echo signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52023—Details of receivers
- G01S7/52036—Details of receivers using analysis of echo signal for target characterisation
- G01S7/52042—Details of receivers using analysis of echo signal for target characterisation determining elastic properties of the propagation medium or of the reflective target
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H30/00—ICT specially adapted for the handling or processing of medical images
- G16H30/40—ICT specially adapted for the handling or processing of medical images for processing medical images, e.g. editing
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Pathology (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Vascular Medicine (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Description
a)「含む」という用語は、所与の請求項に列挙された要素又は動作以外の要素又は動作の存在を排除するものではない。
b)要素に先行する用語「a」又は「an」は、複数のかかる要素の存在を排除するものではない。
c)特許請求の範囲内のいかなる参照符号も、その範囲を限定しない。
d)複数の「手段」が、同一のアイテム、ハードウェア、又はソフトウェア実装構造もしくは機能によって代理され得る。
e)特に明記されない限り、動作の特定のシーケンスはいとされないものとする。
Claims (14)
- 境界特定のためのシステムであって、
媒体通過のせん断波変位を、空間成分及び時間成分を含む変位場として記憶するメモリと、
前記変位場をフィルタリングして指向性変位場を提供する少なくとも1つの指向性フィルタと、
境界推定器が、経時的に蓄積された前記指向性変位場の履歴に基づいて、表示画像内の組織の境界を推定することを実行するために、前記メモリに結合される信号処理装置とを備え、
前記境界推定器は、損傷の境界を推定するために伝搬波の振幅測定値を蓄積する処理アルゴリズムを含み、
前記信号処理装置は、境界推定結果の減算又は相互相関を使用して、複数の反復サイクルにわたる前記損傷の境界のシフトを検出することによって、組織から固有反射体をキャンセルし、成長する前記損傷の境界を提供する、システム。 - 前記変位場のための前記せん断波変位は、超音波プローブからのプッシュパルスによって生成される、請求項1に記載のシステム。
- 前記少なくとも1つの指向性フィルタは、前記指向性変位場として順方向伝搬変位場を提供するように前記変位場をフィルタリングする順方向伝搬フィルタを含む、請求項1に記載のシステム。
- 前記少なくとも1つの指向性フィルタは、前記指向性変位場として逆方向伝搬変位場を提供するように前記変位場をフィルタリングする逆方向伝搬フィルタを含む、請求項1に記載のシステム。
- 前記少なくとも1つの指向性フィルタは、前記指向性変位場として順方向及び逆方向伝搬変位場を提供するように前記変位場をフィルタリングする順方向及び逆方向伝搬フィルタを含む、請求項1に記載のシステム。
- 前記境界推定器は、前記境界を推定するモデルを含み、前記モデルは、伝搬波場を入力として使用し、前記モデルからの推定反射波と、せん断波イメージングを用いて測定された反射波との間の誤差を最小にするように反射波について繰り返し解を求めて推定する、請求項1に記載のシステム。
- 前記境界推定器は、せん断波振幅の履歴を示すピクセルクラッタに基づいて前記境界を推定する、請求項1に記載のシステム。
- 前記システムは、境界推定器モードを有する超音波イメージングシステムを含み、前記境界推定器モードは、前記境界推定器モードが起動されたとき、超音波画像内の前記境界を推定する、請求項1に記載のシステム。
- 媒体中にプッシュパルスを用いてせん断波変位を生成し、変位場を生成する超音波モードをさらに備え、前記信号処理装置は、
前記媒体内の複数のトラッキング位置についてせん断波変位を検出して変位場を生成するせん断波イメージングモジュールと、
前記変位場をフィルタリングして指向性変位場を提供するための少なくとも1つの指向性フィルタを含むデータ処理モジュールとを備え、前記データ処理モジュールは、前記境界推定器を含む、請求項1に記載のシステム。 - 前記境界推定器は、せん断波振幅の履歴を示すピクセルクラッタに基づいて前記境界を推定する、請求項9に記載のシステム。
- 前記超音波モードは境界推定器モードを含み、前記境界推定器モードは、前記境界推定器モードが起動されたとき、超音波画像内の前記境界を推定する、請求項9に記載のシステム。
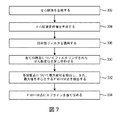
- 境界を決定する方法であって、
媒体を通るせん断波に基づいて、せん断波変位場を生成するステップと、
前記せん断波変位場に指向性フィルタリングを適用して、指向性伝搬変位場を生成するステップと、
前記画像内の組織境界を特定するために、画像内の最高振幅の位置を指し示して、前記指向性伝搬変位場の振幅履歴を蓄積するステップと、
損傷の境界を推定するために伝搬波の振幅測定値を蓄積するステップと、
境界推定結果の減算又は相互相関を使用して、複数の反復サイクルにわたる前記損傷の境界のシフトを検出することによって、組織から固有反射体をキャンセルし、成長する前記損傷の境界を提供するステップと、を含む、方法。 - 前記最高振幅及び/又は前記最高振幅の平均が、超音波画像とともに表示される、請求項12に記載の方法。
- 前記境界を示すために振幅データを通るスプラインを定義するステップをさらに含む、請求項12に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662348302P | 2016-06-10 | 2016-06-10 | |
| US62/348,302 | 2016-06-10 | ||
| PCT/EP2017/063598 WO2017211757A1 (en) | 2016-06-10 | 2017-06-05 | Using reflected shear waves for monitoring lesion growth in thermal ablations |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020209317A Division JP2021053432A (ja) | 2016-06-10 | 2020-12-17 | サーマルアブレーションにおける損傷の成長をモニタリングするための反射せん断波の使用 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019520889A JP2019520889A (ja) | 2019-07-25 |
| JP2019520889A5 JP2019520889A5 (ja) | 2020-01-30 |
| JP6843159B2 true JP6843159B2 (ja) | 2021-03-17 |
Family
ID=59325267
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018563917A Expired - Fee Related JP6843159B2 (ja) | 2016-06-10 | 2017-06-05 | サーマルアブレーションにおける損傷の成長をモニタリングするための反射せん断波の使用 |
| JP2020209317A Pending JP2021053432A (ja) | 2016-06-10 | 2020-12-17 | サーマルアブレーションにおける損傷の成長をモニタリングするための反射せん断波の使用 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020209317A Pending JP2021053432A (ja) | 2016-06-10 | 2020-12-17 | サーマルアブレーションにおける損傷の成長をモニタリングするための反射せん断波の使用 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11337673B2 (ja) |
| EP (1) | EP3468475B8 (ja) |
| JP (2) | JP6843159B2 (ja) |
| CN (1) | CN109310401A (ja) |
| WO (1) | WO2017211757A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3787519B1 (en) * | 2018-05-03 | 2021-10-13 | Koninklijke Philips N.V. | Shear wave amplitude reconstruction for tissue elasticity monitoring and display |
| JP7236312B2 (ja) * | 2019-04-04 | 2023-03-09 | 富士フイルムヘルスケア株式会社 | 超音波診断装置、信号処理装置、および、プログラム |
| CN110840488B (zh) * | 2019-11-27 | 2021-09-28 | 深圳开立生物医疗科技股份有限公司 | 一种基于剪切波的成像方法、系统及装置 |
| CN111671464A (zh) * | 2020-06-19 | 2020-09-18 | 深圳开立生物医疗科技股份有限公司 | 一种图像标记方法、装置、设备及可读存储介质 |
| EP3977938B1 (en) * | 2020-10-05 | 2024-07-10 | Esaote S.p.A. | Method and ultrasound system for shear wave elasticity imaging |
| CN112869768A (zh) * | 2021-01-12 | 2021-06-01 | 哈尔滨工业大学(威海) | 基于多模态成像的身体机能多参数量化方法和装置 |
| CN115414065B (zh) * | 2022-08-30 | 2025-09-30 | 青岛海信医疗设备股份有限公司 | 一种剪切波图像生成方法、超声设备及装置 |
| GB202214230D0 (en) * | 2022-09-28 | 2022-11-09 | Institute Of Cancer Res Royal Cancer Hospital | Vibrational shear wave elastography |
| US12415094B2 (en) * | 2023-03-30 | 2025-09-16 | GE Precision Healthcare LLC | System and method for facilitating shedding of tissue lining cells with ultrasound |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006044996A2 (en) * | 2004-10-15 | 2006-04-27 | The Trustees Of Columbia University In The City Of New York | System and method for automated boundary detection of body structures |
| CN103142251B (zh) * | 2005-04-14 | 2015-04-29 | 维拉声学公司 | 利用面向像素处理的超声成像系统 |
| US9364194B2 (en) * | 2008-09-18 | 2016-06-14 | General Electric Company | Systems and methods for detecting regions of altered stiffness |
| EP2494924A1 (en) * | 2009-10-27 | 2012-09-05 | Hitachi Medical Corporation | Ultrasonic imaging device, ultrasonic imaging method and program for ultrasonic imaging |
| EP2504716B1 (en) * | 2009-11-25 | 2014-07-30 | Koninklijke Philips N.V. | Ultrasonic shear wave imaging with focused scanline beamforming |
| WO2013051943A1 (en) * | 2011-10-03 | 2013-04-11 | Surf Technology As | Nonlinear imaging with dual band pulse complexes |
| ITPD20120026A1 (it) * | 2012-02-03 | 2013-08-04 | Univ Padova | Metodo di misura automatico per una arteria di un feto ed in particolare per l'aorta addominale e dispositivo ecografico per una arteria di un feto, in particolare per la realizzazione di tale metodo |
| US9220479B2 (en) * | 2012-03-30 | 2015-12-29 | Hitachi Aloka Medical, Ltd. | Methods and apparatus for ultrasound imaging |
| CN104302233B (zh) * | 2013-03-05 | 2016-10-12 | 株式会社日立制作所 | 超声波诊断装置以及收发方法 |
| US9332962B2 (en) * | 2013-03-13 | 2016-05-10 | Siemens Medical Solutions Usa, Inc. | Ultrasound ARFI displacement imaging using an adaptive time instance |
| US10194889B2 (en) | 2014-04-23 | 2019-02-05 | Duke University | Methods, systems and computer program products for multi-resolution imaging and analysis |
| JP6390516B2 (ja) * | 2015-05-27 | 2018-09-19 | コニカミノルタ株式会社 | 超音波診断装置及び超音波診断装置の制御方法 |
-
2017
- 2017-06-05 EP EP17739199.2A patent/EP3468475B8/en active Active
- 2017-06-05 JP JP2018563917A patent/JP6843159B2/ja not_active Expired - Fee Related
- 2017-06-05 WO PCT/EP2017/063598 patent/WO2017211757A1/en not_active Ceased
- 2017-06-05 CN CN201780035933.6A patent/CN109310401A/zh active Pending
- 2017-06-05 US US16/306,938 patent/US11337673B2/en active Active
-
2020
- 2020-12-17 JP JP2020209317A patent/JP2021053432A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN109310401A (zh) | 2019-02-05 |
| JP2021053432A (ja) | 2021-04-08 |
| EP3468475B1 (en) | 2020-03-11 |
| US11337673B2 (en) | 2022-05-24 |
| US20190142366A1 (en) | 2019-05-16 |
| JP2019520889A (ja) | 2019-07-25 |
| WO2017211757A1 (en) | 2017-12-14 |
| EP3468475B8 (en) | 2020-04-15 |
| EP3468475A1 (en) | 2019-04-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6843159B2 (ja) | サーマルアブレーションにおける損傷の成長をモニタリングするための反射せん断波の使用 | |
| JP4842933B2 (ja) | 画像診断装置 | |
| CN107028623B (zh) | 使用多孔超声确定材料刚度 | |
| JP6675305B2 (ja) | エラストグラフィ測定システム及びその方法 | |
| JP7634444B2 (ja) | 媒体の超音波特性評価用の方法とシステム | |
| JP2010526626A (ja) | 関心領域の粘弾性の平均値を測定するための方法および装置 | |
| RU2641067C1 (ru) | Ультразвуковая система и способ измерения с использованием сдвиговой волны | |
| CN104203115B (zh) | 超声成像的方法和系统 | |
| JP2012523910A (ja) | 適合体積撮像のためのシステムおよび方法 | |
| JP2014518119A (ja) | 超音波ビームフォーマの対象姿勢に基づく初期化 | |
| JP7535109B2 (ja) | 超音波画像における反響アーチファクトの低減並びに関連するデバイス、システム及び方法 | |
| KR20180013956A (ko) | 단일 추적 위치 전단파 탄성 이미징을 위한 방법, 시스템 및 컴퓨터 프로그램 제품 | |
| KR20220036337A (ko) | 매질의 초음파 특성화 방법 및 시스템 | |
| KR20220036863A (ko) | 매질의 초음파 특성화 방법 및 시스템 | |
| JP6828218B2 (ja) | 超音波画像処理 | |
| KR20220036338A (ko) | 매질의 초음파 특성화 방법 및 시스템 | |
| JP7654066B2 (ja) | 媒体の超音波特性評価用の方法及びシステム | |
| JP2019534115A (ja) | 超音波イメージングシステム及び方法 | |
| US20140187940A1 (en) | Method of calculating displacement of shear wave, method of calculating mechanical modulus of body, and system using the methods | |
| JP7135051B2 (ja) | パルス波ドップラー撮像においてアーチファクト警告を自動的に提供するための方法およびシステム | |
| JP5002181B2 (ja) | 超音波診断装置及び超音波診断装置制御方法 | |
| CN106232019A (zh) | 接触确定装置 | |
| Nguyen et al. | Visualization of the intensity field of a focused ultrasound source in situ | |
| JP2012245092A (ja) | 超音波診断装置 | |
| JP2022500136A (ja) | 超音波画像内のツールを追跡するためのシステム及び方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191216 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191216 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20191216 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20200107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200121 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200409 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200818 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201217 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20201217 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20201225 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20210108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210125 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210222 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6843159 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |