JP6848086B2 - 観察装置および方法並びに観察装置制御プログラム - Google Patents
観察装置および方法並びに観察装置制御プログラム Download PDFInfo
- Publication number
- JP6848086B2 JP6848086B2 JP2019553800A JP2019553800A JP6848086B2 JP 6848086 B2 JP6848086 B2 JP 6848086B2 JP 2019553800 A JP2019553800 A JP 2019553800A JP 2019553800 A JP2019553800 A JP 2019553800A JP 6848086 B2 JP6848086 B2 JP 6848086B2
- Authority
- JP
- Japan
- Prior art keywords
- observation
- optical system
- container
- imaging
- autofocus control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/24—Base structure
- G02B21/241—Devices for focusing
- G02B21/245—Devices for focusing using auxiliary sources, detectors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/36—Microscopes arranged for photographic purposes or projection purposes or digital imaging or video purposes including associated control and data processing arrangements
- G02B21/361—Optical details, e.g. image relay to the camera or image sensor
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M41/00—Means for regulation, monitoring, measurement or control, e.g. flow regulation
- C12M41/30—Means for regulation, monitoring, measurement or control, e.g. flow regulation of concentration
- C12M41/36—Means for regulation, monitoring, measurement or control, e.g. flow regulation of concentration of biomass, e.g. colony counters or by turbidity measurements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/0004—Microscopes specially adapted for specific applications
- G02B21/002—Scanning microscopes
- G02B21/0024—Confocal scanning microscopes (CSOMs) or confocal "macroscopes"; Accessories which are not restricted to use with CSOMs, e.g. sample holders
- G02B21/0032—Optical details of illumination, e.g. light-sources, pinholes, beam splitters, slits, fibers
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/0004—Microscopes specially adapted for specific applications
- G02B21/002—Scanning microscopes
- G02B21/0024—Confocal scanning microscopes (CSOMs) or confocal "macroscopes"; Accessories which are not restricted to use with CSOMs, e.g. sample holders
- G02B21/0036—Scanning details, e.g. scanning stages
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/0004—Microscopes specially adapted for specific applications
- G02B21/002—Scanning microscopes
- G02B21/0024—Confocal scanning microscopes (CSOMs) or confocal "macroscopes"; Accessories which are not restricted to use with CSOMs, e.g. sample holders
- G02B21/0052—Optical details of the image generation
- G02B21/006—Optical details of the image generation focusing arrangements; selection of the plane to be imaged
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/02—Objectives
- G02B21/025—Objectives with variable magnification
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/06—Means for illuminating specimens
- G02B21/08—Condensers
- G02B21/14—Condensers affording illumination for phase-contrast observation
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/24—Base structure
- G02B21/26—Stages; Adjusting means therefor
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/36—Microscopes arranged for photographic purposes or projection purposes or digital imaging or video purposes including associated control and data processing arrangements
- G02B21/365—Control or image processing arrangements for digital or video microscopes
- G02B21/367—Control or image processing arrangements for digital or video microscopes providing an output produced by processing a plurality of individual source images, e.g. image tiling, montage, composite images, depth sectioning, image comparison
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B3/00—Simple or compound lenses
- G02B3/12—Fluid-filled or evacuated lenses
- G02B3/14—Fluid-filled or evacuated lenses of variable focal length
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/28—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/0004—Microscopes specially adapted for specific applications
- G02B21/0088—Inverse microscopes
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/34—Microscope slides, e.g. mounting specimens on microscope slides
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
Landscapes
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Optics & Photonics (AREA)
- General Physics & Mathematics (AREA)
- Analytical Chemistry (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Organic Chemistry (AREA)
- Wood Science & Technology (AREA)
- Zoology (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Genetics & Genomics (AREA)
- General Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Biochemistry (AREA)
- Sustainable Development (AREA)
- Microbiology (AREA)
- Biotechnology (AREA)
- Microscoopes, Condenser (AREA)
- Automatic Focus Adjustment (AREA)
- Apparatus Associated With Microorganisms And Enzymes (AREA)
- Lens Barrels (AREA)
Description
結像光学系により結像された観察対象の画像を撮像する撮像素子を有する撮像系と、
結像光学系の焦点距離を変更する第1の動作、結像レンズを光軸方向に移動させる第2の動作、撮像素子を光軸方向に移動させる第3の動作、および容器を光軸方向に移動させる第4の動作の少なくとも1つを行う動作部と、
容器および結像光学系の少なくとも一方を水平面内において移動させる水平方向駆動部と、
水平方向駆動部を制御して、容器および結像光学系の少なくとも一方を移動させることによって、容器内の観察位置を走査する走査制御部と、
動作部を制御して、観察位置毎のオートフォーカス制御を行うオートフォーカス制御部とを備え、
オートフォーカス制御部が、観察位置の走査方向に隣接する容器の境界部分に基づいて、観察位置毎のオートフォーカス制御の開始タイミングを切り換える。
結像光学系の焦点距離を変更する第1の動作、結像レンズを光軸方向に移動させる第2の動作、および容器を光軸方向に移動させる第4の動作の少なくとも1つを行う動作部と、
容器および結像光学系の少なくとも一方を水平面内において移動させる水平方向駆動部と、
水平方向駆動部を制御して、容器および結像光学系の少なくとも一方を移動させることによって、容器内の観察位置を走査する走査制御部と、
動作部を制御して、観察位置毎のオートフォーカス制御を行うオートフォーカス制御部とを備え、
オートフォーカス制御部が、観察位置の走査方向に隣接する容器の境界部分に基づいて、観察位置毎のオートフォーカス制御の開始タイミングを切り換える。
第1の動作は、結像レンズの焦点距離を変更する動作および対物レンズの焦点距離を変更する動作の少なくとも一方を含むものであってもよい。
結像光学系は、容器内の観察対象の像を結像させる対物レンズをさらに有し、
第1の動作は、結像レンズの焦点距離を変更する動作、対物レンズの焦点距離を変更する動作、および焦点距離変更光学系により、結像光学系の焦点距離を変更する動作の少なくとも1つを含むものであってもよい。
第1の動作は、焦点距離変更光学系により、結像光学系の焦点距離を変更する動作を含むものであってもよい。
動作部は、さらに対物レンズを光軸方向に移動させる第5の動作を行うものであってもよい。
オートフォーカス制御部が、検出部の検出信号に基づいて、各観察位置のオートフォーカス制御を行うものであってもよい。
オートフォーカス制御部が、記憶部に記憶された境界部分の位置情報に基づいて、オートフォーカス制御の開始タイミングを切り換えるものであってもよい。
結像光学系の焦点距離を変更する第1の動作、結像レンズを光軸方向に移動させる第2の動作、撮像素子を光軸方向に移動させる第3の動作、および容器を光軸方向に移動させる第4の動作の少なくとも1つを行うステップと、
観察位置の走査方向に隣接する容器の境界部分に基づいて、観察位置毎のオートフォーカス制御の開始タイミングを切り換えるステップとを有する。
結像光学系の焦点距離を変更する第1の動作、結像レンズを光軸方向に移動させる第2の動作、および容器を光軸方向に移動させる第4の動作の少なくとも1つを行うステップと、
観察位置の走査方向に隣接する容器の境界部分に基づいて、観察位置毎のオートフォーカス制御の開始タイミングを切り換えるステップとを有する。
結像光学系の焦点距離を変更する第1の動作、結像レンズを光軸方向に移動させる第2の動作、撮像素子を光軸方向に移動させる第3の動作、および容器を光軸方向に移動させる第4の動作の少なくとも1つを行う手順と、
観察位置の走査方向に隣接する容器の境界部分に基づいて、観察位置毎のオートフォーカス制御の開始タイミングを切り換える手順とをコンピュータに実行させる。
結像光学系の焦点距離を変更する第1の動作、結像レンズを光軸方向に移動させる第2の動作、および容器を光軸方向に移動させる第4の動作の少なくとも1つを行う手順と、
観察位置の走査方向に隣接する容器の境界部分に基づいて、観察位置毎のオートフォーカス制御の開始タイミングを切り換える手順とをコンピュータに実行させる。
記憶された命令を実行するよう構成されたプロセッサを備え、プロセッサは、
観察対象が収容される複数の容器および容器内の観察対象の像を結像させる結像レンズを有する結像光学系の少なくとも一方を移動させることによって、容器内における各観察位置を結像光学系の観察領域で走査し、結像光学系により結像された観察対象の画像を撮像素子により撮像する処理であって、
結像光学系の焦点距離を変更する第1の動作、結像レンズを光軸方向に移動させる第2の動作、撮像素子を光軸方向に移動させる第3の動作、および容器を光軸方向に移動させる第4の動作の少なくとも1つを行い、
観察位置の走査方向に隣接する容器の境界部分に基づいて、観察位置毎のオートフォーカス制御の開始タイミングを切り換える処理を実行する。
記憶された命令を実行するよう構成されたプロセッサを備え、プロセッサは、
観察対象が収容される複数の容器および容器内の観察対象の像を結像させる結像レンズを有する結像光学系の少なくとも一方を移動させることによって、容器内における各観察位置を結像光学系の観察領域で走査する処理であって、
結像光学系の焦点距離を変更する第1の動作、結像レンズを光軸方向に移動させる第2の動作、および容器を光軸方向に移動させる第4の動作の少なくとも1つを行い、
観察位置の走査方向に隣接する容器の境界部分に基づいて、観察位置毎のオートフォーカス制御の開始タイミングを切り換える処理を実行する。
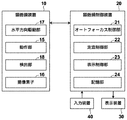
11 白色光源
12 コンデンサレンズ
13 スリット板
14 結像光学系
14a 位相差レンズ
14b 対物レンズ
14c 位相板
14d 結像レンズ
15 動作部
15A 第1の動作部
15B 第2の動作部
15C 第3の動作部
15D 第4の動作部
15E 第5の動作部
15F 第6の動作部
15G 第7の動作部
15H 第8の動作部
16 撮像素子
17 水平方向駆動部
18 検出部
18a 第1のオートフォーカス用変位センサ
18b 第2のオートフォーカス用変位センサ
18c 第3のオートフォーカス用変位センサ
18d 第4のオートフォーカス用変位センサ
20 顕微鏡制御装置
21 オートフォーカス制御部
22 走査制御部
23 表示制御部
24 記憶部
30 表示装置
40 入力装置
50 培養容器
51 ステージ
51a 開口
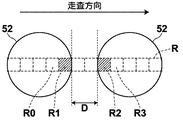
52 ウェル
52a 底部
70,75 焦点距離変更光学系
71 第1のウェッジプリズム
72 第2のウェッジプリズム
D 境界部分
E 走査終了点
L 照明光
M 走査位置を示す実線
R 観察位置
R1 観察位置
R2 観察位置
S 走査開始点
Claims (20)
- 観察対象が収容される複数の容器内の前記観察対象の像を結像させる結像レンズを有する結像光学系と、
前記結像光学系により結像された前記観察対象の画像を撮像する撮像素子を有する撮像系と、
前記結像光学系の焦点距離を変更する第1の動作、前記結像レンズを光軸方向に移動させる第2の動作、前記撮像素子を前記光軸方向に移動させる第3の動作、および前記容器を光軸方向に移動させる第4の動作の少なくとも1つを行う動作部と、
前記容器および前記結像光学系の少なくとも一方を水平面内において移動させる水平方向駆動部と、
該水平方向駆動部を制御して、前記容器および前記結像光学系の少なくとも一方を移動させることによって、前記容器内の観察位置を走査する走査制御部と、
前記動作部を制御して、前記観察位置毎のオートフォーカス制御を行うオートフォーカス制御部とを備え、
前記オートフォーカス制御部が、前記観察位置の走査方向に隣接する前記容器の境界部分に基づいて、前記観察位置毎のオートフォーカス制御の開始タイミングを切り換える観察装置。 - 前記動作部は、前記第1の動作、前記第2の動作、前記第3の動作および前記第4の動作のうちの複数の動作を行う請求項1に記載の観察装置。
- 観察対象が収容される複数の容器内の前記観察対象の像を結像させる結像レンズを有する結像光学系と、
前記結像光学系の焦点距離を変更する第1の動作、前記結像レンズを光軸方向に移動させる第2の動作、および前記容器を光軸方向に移動させる第4の動作の少なくとも1つを行う動作部と、
前記容器および前記結像光学系の少なくとも一方を水平面内において移動させる水平方向駆動部と、
該水平方向駆動部を制御して、前記容器および前記結像光学系の少なくとも一方を移動させることによって、前記容器内の観察位置を走査する走査制御部と、
前記動作部を制御して、前記観察位置毎のオートフォーカス制御を行うオートフォーカス制御部とを備え、
前記オートフォーカス制御部が、前記観察位置の走査方向に隣接する前記容器の境界部分に基づいて、前記観察位置毎のオートフォーカス制御の開始タイミングを切り換える観察装置。 - 前記動作部は、前記第1の動作、前記第2の動作および前記第4の動作のうちの複数の動作を行う請求項3に記載の観察装置。
- 前記結像光学系は、前記容器内の前記観察対象の像を結像させる対物レンズをさらに有し、
前記第1の動作は、前記結像レンズの焦点距離を変更する動作および前記対物レンズの焦点距離を変更する動作の少なくとも一方を含む請求項1から4のいずれか1項に記載の観察装置。 - 前記結像光学系の焦点距離を変更する焦点距離変更光学系をさらに備え、
前記結像光学系は、前記容器内の前記観察対象の像を結像させる対物レンズをさらに有し、
前記第1の動作は、前記結像レンズの焦点距離を変更する動作、前記対物レンズの焦点距離を変更する動作、および前記焦点距離変更光学系により、前記結像光学系の焦点距離を変更する動作の少なくとも1つを含む請求項1から4のいずれか1項に記載の観察装置。 - 前記動作部は、さらに前記対物レンズを前記光軸方向に移動させる第5の動作を行う請求項5または6に記載の観察装置。
- 前記結像光学系の焦点距離を変更する焦点距離変更光学系をさらに備え、
前記第1の動作は、前記焦点距離変更光学系により、前記結像光学系の焦点距離を変更する動作を含む請求項1から4のいずれか1項に記載の観察装置。 - 前記結像光学系は、前記容器内の前記観察対象の像を結像させる対物レンズをさらに有し、
前記動作部は、さらに前記対物レンズを前記光軸方向に移動させる第5の動作を行う請求項1から4および8のいずれか1項に記載の観察装置。 - 前記オートフォーカス制御部が、前記境界部分の直後の観察位置のオートフォーカス制御を、前記境界部分の直前の観察位置のオートフォーカス制御の終了時点から前記境界部分の直後の観察位置に前記結像光学系が到達する前までの間に開始する請求項1から8のいずれか1項に記載の観察装置。
- 前記オートフォーカス制御部が、前記境界部分の直後以外の観察位置については、該観察位置に前記結像光学系が到達した時点からオートフォーカス制御を開始する請求項10に記載の観察装置。
- 前記境界部分の直後の観察位置のオートフォーカス制御のための時間が、前記境界部分の直後以外の観察位置のオートフォーカス制御のための時間よりも長い請求項10または11に記載の観察装置。
- 前記結像光学系が観察位置に到達する前に、先行して前記観察位置における前記容器の鉛直方向の位置を検出する検出部を備え、
前記オートフォーカス制御部が、前記検出部の検出信号に基づいて、前記各観察位置のオートフォーカス制御を行う請求項1から12のいずれか1項に記載の観察装置。 - 前記検出部が、前記結像光学系を挟んで前記走査方向について並べて設けられた少なくとも2つの変位センサを有し、前記走査方向の向きの変更に応じて、使用する前記変位センサを切り換える請求項13に記載の観察装置。
- 前記検出部が、前記容器の境界部分を検出する請求項13または14に記載の観察装置。
- 前記オートフォーカス制御部が、前記検出部によって検出された検出信号が異常である場合には、前記異常な検出信号が検出された観察位置については、該観察位置の前記走査方向について前後の観察位置の前記検出部の検出信号に基づくオートフォーカス制御を行う請求項13から15のいずれか1項に記載の観察装置。
- 前記容器の境界部分の位置情報を記憶する記憶部を備え、
前記オートフォーカス制御部が、前記記憶部に記憶された境界部分の位置情報に基づいて、前記オートフォーカス制御の開始タイミングを切り換える請求項1から16のいずれか1項に記載の観察装置。 - 前記容器が、ウェルプレートの各ウェルである請求項1から17のいずれか1項に記載の観察装置。
- 観察対象が収容される複数の容器および前記容器内の前記観察対象の像を結像させる結像レンズを有する結像光学系の少なくとも一方を移動させることによって、前記容器内における各観察位置を前記結像光学系の観察領域で走査し、前記結像光学系により結像された前記観察対象の画像を撮像素子により撮像する観察方法であって、
前記結像光学系の焦点距離を変更する第1の動作、前記結像レンズを光軸方向に移動させる第2の動作、前記撮像素子を前記光軸方向に移動させる第3の動作、および前記容器を光軸方向に移動させる第4の動作の少なくとも1つを行うステップと、
前記観察位置の走査方向に隣接する前記容器の境界部分に基づいて、前記観察位置毎のオートフォーカス制御の開始タイミングを切り換えるステップとを有する観察方法。 - 観察対象が収容される複数の容器および前記容器内の前記観察対象の像を結像させる結像レンズを有する結像光学系の少なくとも一方を移動させることによって、前記容器内における各観察位置を前記結像光学系の観察領域で走査し、前記結像光学系により結像された前記観察対象の画像を撮像素子により撮像する観察方法をコンピュータに実行させる観察装置制御プログラムであって、
前記結像光学系の焦点距離を変更する第1の動作、前記結像レンズを光軸方向に移動させる第2の動作、前記撮像素子を前記光軸方向に移動させる第3の動作、および前記容器を光軸方向に移動させる第4の動作の少なくとも1つを行う手順と、
前記観察位置の走査方向に隣接する前記容器の境界部分に基づいて、前記観察位置毎のオートフォーカス制御の開始タイミングを切り換える手順とをコンピュータに実行させる観察装置制御プログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017221445 | 2017-11-17 | ||
| JP2017221445 | 2017-11-17 | ||
| PCT/JP2018/040387 WO2019098018A1 (ja) | 2017-11-17 | 2018-10-30 | 観察装置および方法並びに観察装置制御プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2019098018A1 JPWO2019098018A1 (ja) | 2020-11-26 |
| JP6848086B2 true JP6848086B2 (ja) | 2021-03-24 |
Family
ID=66540296
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019553800A Active JP6848086B2 (ja) | 2017-11-17 | 2018-10-30 | 観察装置および方法並びに観察装置制御プログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11480780B2 (ja) |
| EP (1) | EP3712671B1 (ja) |
| JP (1) | JP6848086B2 (ja) |
| WO (1) | WO2019098018A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021181482A1 (ja) * | 2020-03-09 | 2021-09-16 | 株式会社日立ハイテク | 顕微鏡画像撮像方法および顕微鏡画像撮像装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030193600A1 (en) * | 2002-03-28 | 2003-10-16 | Minolta Co., Ltd | Image capturing apparatus |
| JP2006003653A (ja) * | 2004-06-17 | 2006-01-05 | Olympus Corp | 生体試料観察システム |
| JP5152622B2 (ja) | 2007-05-23 | 2013-02-27 | 横河電機株式会社 | 創薬スクリーニング装置及びこの装置を用いた創薬スクリーニング方法 |
| JP2009025349A (ja) | 2007-07-17 | 2009-02-05 | Nikon Corp | 顕微鏡装置、顕微鏡制御方法、および、プログラム |
| US9395528B2 (en) | 2007-08-22 | 2016-07-19 | Nikon Corporation | Photographing control device, microscope and program |
| JP5207213B2 (ja) | 2008-09-16 | 2013-06-12 | 横河電機株式会社 | オートフォーカス装置 |
| JP2010091739A (ja) * | 2008-10-07 | 2010-04-22 | Olympus Corp | 自動焦点合焦装置を備えた画像撮像装置 |
| EP2845045B1 (en) * | 2012-05-02 | 2023-07-12 | Leica Biosystems Imaging, Inc. | Real-time focusing in line scan imaging |
| US9064166B2 (en) * | 2013-11-26 | 2015-06-23 | Symbol Technologies, Llc | Optimizing focus plane position of imaging scanner |
| JP6667411B2 (ja) * | 2016-09-30 | 2020-03-18 | 富士フイルム株式会社 | 観察装置および方法並びに観察装置制御プログラム |
-
2018
- 2018-10-30 EP EP18878865.7A patent/EP3712671B1/en active Active
- 2018-10-30 WO PCT/JP2018/040387 patent/WO2019098018A1/ja not_active Ceased
- 2018-10-30 JP JP2019553800A patent/JP6848086B2/ja active Active
-
2020
- 2020-05-14 US US15/931,596 patent/US11480780B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US11480780B2 (en) | 2022-10-25 |
| JPWO2019098018A1 (ja) | 2020-11-26 |
| WO2019098018A1 (ja) | 2019-05-23 |
| US20200271914A1 (en) | 2020-08-27 |
| EP3712671A1 (en) | 2020-09-23 |
| EP3712671A4 (en) | 2021-01-13 |
| EP3712671B1 (en) | 2025-02-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10761295B2 (en) | Image focusing device, image focusing method and computer readable medium with image focusing control program | |
| US11163145B2 (en) | Observation device, observation method, and observation device control program | |
| JP6667411B2 (ja) | 観察装置および方法並びに観察装置制御プログラム | |
| JP6848086B2 (ja) | 観察装置および方法並びに観察装置制御プログラム | |
| JPWO2019202979A1 (ja) | 観察装置、観察装置の作動方法、及び観察制御プログラム | |
| US11402607B2 (en) | Observation device, observation method, and observation device control program | |
| US11009689B2 (en) | Observation device, observation method, and observation device control program | |
| US11480777B2 (en) | Observation device, observation method, and observation device control program storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200514 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210303 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6848086 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |