以下、添付図面に従って本発明に係る内視鏡の好ましい実施形態について詳説する。
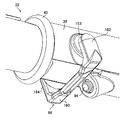
図1は、本発明の実施形態に係る内視鏡10を備えた内視鏡システム12の構成図である。内視鏡システム12は、内視鏡10、プロセッサ装置14、光源装置16及びディスプレイ18を備える。なお、図1には、内視鏡システム12にて使用される処置具56も図示されている。
内視鏡10は、操作部材である起立操作レバー20を備えた操作部22と、操作部22の先端側に設けられた挿入部24と、を備える。
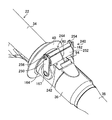
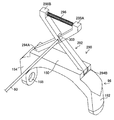
また、挿入部24の先端部26の構成を示した図2及び図3の斜視図の如く、挿入部24の先端部26には、先端部材28が設けられ、先端部材28には後述する起立台30が取り付けられる。図2は、起立台30が倒伏位置に位置された先端部材28の斜視図であり、図3は、起立台30が起立位置に位置された先端部材28の斜視図である。
なお、以下の説明において、図1から図3のZ(+)方向を上方向と称し、Z(−)方向を下方向と称し。また、X(+)方向を右方向と称し、X(−)方向を左方向と称する。さらに、Y(+)方向を先端側方向と称し、Y(−)方向を基端側方向と称する。
図1に戻り、操作部22は、起立操作レバー20が設けられた操作部本体32と、操作部本体32に連接された把持部34と、把持部34から先端側に向かって延出された延設部36とを有し、延設部36の先端側に挿入部24の基端部が折れ止め管38を介して連結されている。なお、把持部34は、内視鏡10の操作時に術者が把持する部分である。
延設部36とは、起立操作機構120(図9及び図10)に連結された可動部材96(図6参照)を設けるために、把持部34の先端部から先端側に向けて延設された非把持領域の部分である。具体的には、把持部34に設けられた処置具導入口42の凸状のマウント部44の先端部44Aから折れ止め管38の基端部38Aまでの領域Aが、延設部36に相当する。この延設部36の領域Aには、円環状のフランジ40が設けられている。なお、起立操作機構120及び可動部材96については後述する。
操作部22の操作部本体32には、ユニバーサルコード46が備えられる。ユニバーサルコード46の先端側には、光源コネクタ50が設けられ、この光源コネクタ50は光源装置16に接続される。また、光源コネクタ50には電気コネクタ48が分岐して設けられており、この電気コネクタ48はプロセッサ装置14に接続される。
挿入部24は、先端側から基端側に向かって先端部26、湾曲部52及び軟性部54が連結されて構成される。
挿入部24の内部には、以下の内容物が設けられる。すなわち、図1の処置具56の先端部56Aを、図2の先端部材28に導く処置具チャンネル58と、先端部材28から導出される処置具56の先端部56Aの導出方向を変更する操作を行うための起立操作ワイヤ60(以下、ワイヤ60と称する。)と、ワイヤ60の先端を先端部材28に導く起立操作ワイヤチャンネル62(以下、ワイヤチャンネル62と称する。)と、図1の光源装置16から供給される照明光を、図2の先端部材28に導くライトガイド(不図示)と、送気送水チューブ(不図示)と、アングルワイヤ(不図示)と、信号ケーブル(不図示)等の内容物が設けられている。
図1に戻り、操作部22は、全体として略円筒状に構成されており、Y(+)−Y(−)方向に沿った円筒軸Bを有している。操作部22の円筒軸Bを含む上下方向の断面を境として一方側の側面22Aには、湾曲部52を湾曲操作する一対のアングルノブ64、64が配置される。一対のアングルノブ64、64は、同軸上で回動自在に設けられる。
湾曲部52は、複数のアングルリング(不図示)が相互に回動可能に連結されてなる構造体を有する。湾曲部52は、この構造体の外周に金属線で編んだ筒状の網体を被覆し、この網体の外周面にゴム製の筒状の外皮を被覆することによって構成される。このように構成された湾曲部52からアングルノブ64、64にかけて、例えば4本のアングルワイヤ(不図示)が配設されており、アングルノブ64、64の回動操作によって、これらのアングルワイヤを押し引き操作することにより湾曲部52が上下左右に湾曲される。
軟性部54は、弾性を有する薄い金属製の帯状板を螺旋状に巻回してなる螺旋管(不図示)を有する。軟性部54は、この螺旋管の外側に、金属線で編んだ筒状の網体を被覆し、この網体の外周面に樹脂からなる筒状の外皮を被覆することによって構成される。
操作部本体32には、送気送水ボタン66と吸引ボタン68とが並設されている。送気送水ボタン66を操作することによって、図2の先端部材28に設けられた送気送水ノズル70からエアと水を噴出することができる。また、図1の吸引ボタン68を操作することによって、図2の先端部材28に設けられた処置具導出口72を兼ねる吸引口から血液等の体液を吸引することができる。
更に、図1の操作部22の把持部34には、処置具56を導入する処置具導入口42が設けられる。処置具導入口42から先端部56Aを先頭にして導入された処置具56は、挿入部24に挿通された図2の処置具チャンネル58に挿通されて、先端部材28に設けられた処置具導出口72から外部に導出される。
また、図1の操作部22の一方の側面22Aには、アングルノブ64、64と同軸上に起立操作レバー20が回転自在に設けられる。起立操作レバー20は、把持部34を把持する術者の手によって回転操作される。起立操作レバー20が回転操作されると、起立操作レバー20の回転操作に連動して動作する起立操作機構120(図9及び図10参照)によって、図2のワイヤ60が押し引きされて、ワイヤ60の先端側に連結された起立台30の姿勢が、図3の起立位置と図2の倒伏位置との間で変更される。上述の起立操作機構120については後述する。
上記の如く構成された実施形態の内視鏡10は、十二指腸鏡として用いられる側視内視鏡であり、挿入部24が口腔を介して被検体内に挿入される。挿入部24は、食道から胃を経て十二指腸まで挿入されて、所定の検査又は治療等の処置が行われる。
実施形態では、処置具56として、先端部56Aに生体組織を採取可能なカップを有する生検鉗子を例示したが、これに限定されるものではない。例えば、他の処置具として、造影チューブ又はEST(Endoscopic Sphincterotomy:内視鏡的乳頭切開術)用ナイフ等の処置具が使用される。
次に、先端部26について説明する。
図2の如く、先端部26は、先端部材28と、先端部材28に着脱自在に装着されるキャップ部材76と、から構成される。キャップ部材76は、先端側が封止された略筒状に構成され、その外周面の一部には、略矩形状の開口窓76Aが形成されている。キャップ部材76が先端部材28に装着されると、キャップ部材76の開口窓76Aが先端部材28の処置具導出口72に連通される。これにより、処置具導出口72から導出された処置具56の先端部56Aが開口窓76Aから外部に導出される。
キャップ部材76は、弾性力のある材質、例えばフッ素ゴム又はシリコンゴム等のゴム材料、又はポリサルフォン又はポリカーボネイト等の樹脂材料から構成されており、その基端側には、先端部材28に形成された溝(不図示)に係合する係合部(不図示)を有し、この係合部を先端部材28の溝に係合することにより先端部材28に装着される。また、キャップ部材76は、内視鏡10の処置が終了すると、先端部材28から取り外されて洗浄消毒されるか、もしくはディスポーザブルとして廃棄される。
先端部材28は、耐食性を有する金属材料で構成される。また、先端部材28には、先端側に向けて突設された隔壁78と、隔壁78に対向する隔壁80とが一体に設けられている。隔壁78と隔壁80との間には、起立台30を収容する起立台収容室82が形成される。この起立台収容室82の基端側に、処置具56を外部に導出させる処置具導出口72が形成され、この処置具導出口72に処置具チャンネル58の先端部が接続されている。
処置具チャンネル58は、図1の挿入部24の内部に挿通される。処置具チャンネル58の基端部は、操作部22の内部に設けられた分岐管200(図10参照)の先端管202に接続される。
この分岐管200は、周知な構造であり、基端部が二つの管路204、206に分岐され、一方の管路204の基端に処置具導入口42が形成される。よって、処置具導入口42から管路204を介して処置具チャンネル58に導入された処置具56の先端部56Aは、処置具チャンネル58に挿通されて、図2の処置具導出口72から起立台収容室82に導出される。そして、起立台収容室82に導出された処置具56の先端部56Aは、起立台収容室82に配置された起立台30の起立位置と倒伏位置との間の姿勢に応じて導出方向が変更される。また、図10に示した分岐管200の他方の管路206の基端には、血液等の体液を吸引する吸引管208の先端が接続されている。
図4は、起立台30の拡大斜視図である。図4の如く、起立台30の上面にはガイド面30Aが備えられる。このガイド面30Aに沿って、図1の処置具56の先端部56Aが、図2のキャップ部材76の開口窓76Aから外部に導出される。
図4の如く、起立台30は、その基部30Bの両側面に回動軸部84、86が備えられる。この回動軸部84、86の軸方向は、起立台30が先端部材28に取り付けられた場合に、図2のX(+)−X(−)方向に設定される。
図5は、先端部材28に対する起立台30の取り付け構造を示した要部断面図である。図5の如く、回動軸部84、86の軸は、起立台30の基部30Bを介して同軸上に配置され、回動軸部84が隔壁78の凹状の軸受部78Aに回動自在に嵌合され、回動軸部86が隔壁80の凹状の軸受部80Aに回動自在に嵌合されている。また、回動軸部84、86は、それぞれ軸受部78A、80Aに対して回動軸部84、86の軸方向に所定のガタ量xをもって装着されている。このガタ量xを利用して回動軸部84、86を一方側に片寄せしたときに、軸受部78A、80Aのうち一方の軸受部の一部が露出され、その露出部にブラシを容易に挿入することができるので、軸受部78A、80Aの洗浄性が向上されている。
図2及び図3の如く、隔壁78の内部には、光学系収容室88が備えられる。光学系収容室88の上部には、照明窓90と観察窓92とが隣接して配設され、また、観察窓92に向けられた送気送水ノズル70が先端部材28に設けられる。送気送水ノズル70は、挿入部24に挿通された送気送水チューブ(不図示)を介して不図示の送気送水装置に接続され、図1に示した操作部22の送気送水ボタン66を操作することによって、エア又は水が送気送水ノズル70から観察窓92に向けて噴射される。これにより、観察窓92が洗浄される。
また、光学系収容室88の内部には、照明部(不図示)と撮影部(不図示)とが収容される。照明部は、照明窓90の内側に設置された照明レンズ(不図示)と、この照明レンズに先端面が臨むように配置されたライトガイド(不図示)とを備えている。ライトガイドは、内視鏡10の挿入部24から操作部22を介してユニバーサルコード46に配設され、その基端が光源コネクタ50を介して光源装置16に接続される。これにより、光源装置16からの照射光がライトガイドを介して伝達され、照明窓90から外部に照射される。
前述の撮影部は、観察窓92の内側に配設された撮影光学系(不図示)とCMOS(complementary metal oxide semiconductor)型又はCCD(charge coupled device)型の撮像素子(不図示)とを備えている。撮像素子は、図1の挿入部24に挿通された信号ケーブル(不図示)を介してプロセッサ装置14に接続される。この撮影部によって得られた被写体像の撮像信号は、信号ケーブルを介してプロセッサ装置14に出力されて画像処理された後、ディスプレイ18に被写体像として表示される。
先の説明と重複するが、まず、ワイヤ60について説明すると、ワイヤ60は、図2及び図3の如く、ワイヤ60の先端が導出口74の外部に配置されて起立台30に連結される。また、ワイヤ60の基端は、図6に示すように操作部22に設けられた導入口94の外側に配置されて可動部材96に連結される。
図6は、操作部22の斜視図であり、図1に示した操作部22の一方の側面22Aに対向する他方の側面22Bを図示した斜視図である。
図6によれば、導入口94は、操作部22の延設部36に設けられている。導入口94から外側に配置されたワイヤ60の基端には、取付部材98が設けられており、この取付部材98が、可動部材96の係合穴(後述)に着脱自在に装着されている。
操作部22には、可動部材96が設けられている。可動部材96は、操作部22の外部に露出して配置されており、起立操作機構120(図9及び図10参照)により起立操作レバー20の操作に連動して動作する。また、実施形態では、可動部材96は、アングルノブ64、64が設けられている一方の側面22Aと対向する他方の側面22Bに回転自在に配置されているが、操作部22に対する可動部材96の配置位置は限定されるものではなく、操作部22の所定の位置に回転自在に配置されていればよい。また、可動部材96は、起立操作レバー20の回転操作に連動して回転する従動型のレバーである。
起立操作機構120は、操作部22の内部に配置され、起立操作レバー20の操作に連動して可動部材96を動作させる機構である。したがって、起立操作レバー20を操作すると、可動部材96が起立操作機構120を介して動作し、可動部材96に連結されているワイヤ60(図2参照)が押し引きされる。
次に、ワイヤ60の先端を起立台30に係脱自在に連結する連結構造について説明する。
図2及び図3に戻り、ワイヤ60は、先端部に係合部材100が設けられる。また、起立台30には、係合部材100と係脱自在に係合される収容溝102であって、X(+)方向側に開口104が形成された収容溝102が設けられる。これにより、ワイヤ60の先端に設けられた係合部材100を、開口104を介して収容溝102に収容させることによって、ワイヤ60の先端が起立台30に連結される。
実施形態では、係合部材100は球体であり、収容溝102は球体の係合部材100を収容する球面状凹部である。なお、係合部材100及び収容溝102の形状は上記の形状に限定されるものではないが、係合部材100を球体とし、収容溝102を球面状凹部とすることにより、ワイヤ60の押し引き操作によって生じる係合部材100と収容溝102との間の摺動抵抗を低減することができる。よって、ワイヤ60の押し引き操作を円滑に行うことができる。
また、先端部材28には、図3の起立位置において収容溝102に連設される係合用誘導部106が備えられる。係合用誘導部106は、導出口74から導出された係合部材100を、収容溝102の開口104に誘導する機能を備えている。導出口74は、先端部材28に設けられており、挿入部24の内部に設けられたワイヤチャンネル62を介して導入口94(図6参照)に連通されている。
このような係合用誘導部106を有する内視鏡10によれば、導入口94からワイヤ60を、係合部材100を先頭に導入していくと、係合部材100はワイヤチャンネル62(図2参照)に挿通されて、導出口74から外部に導出される。そして、係合部材100は、継続するワイヤ60の導入操作によって、係合用誘導部106により起立台30の収容溝102の開口104に向けて誘導されていき、開口104から収容溝102に係合される。これにより、実施形態の内視鏡10によれば、ワイヤ60の導入操作のみで、ワイヤ60の係合部材100を起立台30の収容溝102に係合させることができる。
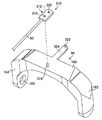
図7は、係合用誘導部106を介して係合部材100が収容溝102に係合された拡大斜視図である。図8は、係合部材100が係合用誘導部106に誘導されて収容溝102に係合されるまでの動作を継時的に示した説明図である。
図7及び図8の如く、係合用誘導部106は、導出口74から導出された係合部材100を、収容溝102の開口104まで誘導する係合用誘導路108と、係合用誘導路108内で収容溝102の開口104に連設された変形発生部110と、を備える。変形発生部110は、係合用誘導路108内を開口104に向けてY(+)方向に進む係合部材100に接触して、係合部材100をY(+)方向に誘導しつつX(+)方向に誘導する。
これにより、ワイヤ60の先端は、係合部材100が係合用誘導路108に沿って開口104に近づくのに従って、開口104からしだいに遠ざかる方向(X(+)方向)に弾性変形する。係合用誘導路108内を進む係合部材100は、変形発生部110を通過した場合に、ワイヤ60の復元力によりX(−)方向に移動して、開口104から収容溝102に係合される。
係合用誘導路108は、先端部材28の周面28Aの一部を凹状に切り欠くことにより形成されており、導出口74からY(+)方向に向けてX(+)方向に漸次傾斜した面である。この係合用誘導路108の先端側に変形発生部110が形成されている。
また、係合用誘導部106には、係合部材100が収容溝102に係合された場合に、ワイヤ60の先端側を没入させて逃がす溝112が形成されている。また、起立台30の収容溝102の基端側にも、係合部材100が収容溝102に係合された場合に、ワイヤ60の先端側を没入させて逃がす溝114が形成されている。図8の紙面に直交する方向の溝112の幅寸法は、ワイヤ60の直径よりも大きく、且つ変形発生部110を通過する係合部材100が溝112に没入しないように、係合部材100の直径よりも小さい。また、図8の紙面に直交する方向の溝114の幅寸法は、ワイヤ60の直径よりも大きく、且つ収容溝102に係合された係合部材100がY(−)方向に抜けないように、係合部材100の直径よりも小さい。
係合用誘導部106は、起立台30を起立位置に位置させた状態で係合部材100を収容溝102に係合させる場合に適した形態である。つまり、収容溝102は、図7の如く、起立台30が起立位置に位置した状態で、導出口74に対向した位置に配置されている。よって、導出口74から係合部材100を直進させることにより、起立位置に位置した起立台30の収容溝102に係合部材100を、係合用誘導部106を介して係合させることができる。
次に、起立台30の収容溝102に係合されたワイヤ60の係合部材100を、収容溝102から離脱させるための離脱構造について説明する。
先端部材28には、離脱用誘導面116が備えられており、この離脱用誘導面116は、隔壁80の上面に備えられている(図2参照)。この離脱用誘導面116は、X(+)方向に向けてZ(−)方向に傾斜したガイド面(図2、図3参照)である。また、離脱用誘導面116は、収容溝102に係合部材100が係合されて起立台30が倒伏位置に位置した状態で、ワイヤ60がさらに押し込み操作された場合に、収容溝102内から開口104の外へ係合部材100が離脱する方向にワイヤ60を誘導する面として機能する。
このように構成された離脱構造によれば、可動部材96の係合穴(後述)から、ワイヤ60の基端に設けられた取付部材(後述)を取り外し、その後、延設部36の導入口94からワイヤ60を押し込み操作して、起立台30を図3の起立位置から図2の倒伏位置に位置させる。この後、ワイヤ60をさらに押し込み操作すると、先端部材28の離脱用誘導面116によって、収容溝102内から開口104の外へ係合部材100が離脱するX(+)方向にワイヤ60が誘導される。これにより、ワイヤ60の復元力によって係合部材100が、収容溝102内から開口104の外へ容易に離脱する。
次に、起立操作機構120について説明する。
図9は、起立操作機構120の全体構成を示した構成図である。また、図10は、図9の起立操作機構120の側面図である。なお、図9及び図10では、操作部22の外装ケース(不図示)を省略し、操作部22の内部に配置された起立操作機構120を示している。
図9及び図10に示すように、起立操作機構120は、起立操作レバー20と可動部材96とを連結し、起立操作レバー20の回転動作を可動部材96に伝達する動力伝達機構として機能する。
起立操作機構120は、起立操作レバー20の回転運動を直線運動に変換する第1変換機構124と、第1変換機構124によって直線運動されるワイヤ126と、ワイヤ126の直線運動を回転運動に変換して可動部材96を回転させる第2変換機構128と、を備える。
第1変換機構124は、起立操作レバー20に基端が連結されたクランク部材130と、クランク部材130の先端に基端が連結された第1スライダ132と、第1スライダ132の先端に基端が連結された第2スライダ134と、を備えている。
ワイヤ126は、ワイヤ126の基端が第2スライダ134の先端に接続され、ワイヤ126の先端が第2変換機構128に接続されている。
上記の如く構成された第1変換機構124によれば、起立操作レバー20が回転操作されると、それに連動してクランク部材130、第1スライダ132及び第2スライダ134が円筒軸Bに沿って直線運動する。これにより、ワイヤ126が円筒軸Bに沿って直線運動し、その直線運動が第2変換機構128に伝達される。
第2変換機構128は、レバー136と、第1ギア138と、第2ギア140と、第3ギア142と、第4ギア144と、を備え、これらのギアによって減速機構が構成されている。
レバー136は、ブラケット146に軸部148を介して回転自在に支持され、ワイヤ126の先端が連結されている。よって、レバー136は、ワイヤ126の直線運動によって軸部148を中心に回転される。
第1ギア138は、レバー136と一体に設けられ、軸部148を中心に回転される。第2ギア140は、第1ギア138と噛合され、軸部150を介してブラケット146に回転自在に支持されている。第3ギア142は、第2ギア140と一体に設けられ、且つ第2ギア140と同軸上に設けられている。
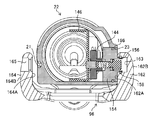
第4ギア144は、第3ギア142に噛合されている。また、第4ギア144には、第4ギア144と同軸上に回転軸152(図13参照)が固定されている。回転軸152の基端側は、ブラケット146に回転自在に支持され、回転軸152の先端側は操作部22の外部に配置されている。この回転軸152は、円盤状の回転体154と同軸上に設けられており、この回転体154は、回転軸152に連結されて回転軸152とともに回転される。また、回転体154は、Oリング166を介して操作部22の開口部23に回動自在に支持されている。このOリング166によって開口部23が封止され、操作部22の水密性が確保されている。
回転体154の側面には、スリーブ156が形成されている。このスリーブ156は、回転体154と同軸上に設けられ、スリーブ156の外周面に、可動部材96の第1の軸受部162がOリング158を介して連結されている。
なお、実施形態においては、既述のスリーブ156が、可動部材96を操作部22に回転自在に支持する本発明の第1の軸部に相当し、Oリング158が本発明のシール部材に相当する。第1の軸受部162とスリーブ156との連結構造については後述する。
上記の如く構成された第2変換機構128(図9及び図10参照)によれば、ワイヤ126の直線運動がレバー136に伝達されると、レバー136とともに第1ギア138が回転操作され、第1ギア138の回転動作が第2ギア140及び第3ギア142を介して第4ギア144に伝達されて、第4ギア144が回転される。第4ギア144が回転されると、回転軸152(図13参照)とともに回転体154が回転される。これにより、回転体154のスリーブ156にOリング158を介して連結された可動部材96が、スリーブ155の軸芯を中心に回転される。
また、起立操作機構120(図9及び図10参照)によれば、減速機構を含む第2変換機構128によって、起立操作レバー20の回転動作を減速して可動部材96に伝達している。つまり、起立操作レバー20の操作によって動作するレバー136の回転角に対して、可動部材96の第1の軸受部162の回転角が小さくなる。これにより、起立操作レバー20を操作するのに必要な力をより小さくすることができ、起立操作レバー20による起立台30の起伏姿勢制御が容易になる。
また、実施形態では、起立操作機構120を構成する構成要素にワイヤ126を用いている。ワイヤ126を用いることにより、以下の利点がある。すなわち、第2スライダ134の直線運動をレバー136の回転運動に変換する際に、ワイヤ126は、曲線的な動き(弛み)ができるので、リンク機構を設置しないで済み、スペースの制約が減る。また、第2スライダ134とレバー136とをリンク機構で連結した場合、起立操作機構120において力の逃げ場が少なくなるが、ワイヤ126を使用することにより、ワイヤ126が弛むことによって、力を逃がすことができるので、起立操作機構120にかかる負荷を低減することができる。
次に、操作部22に可動部材96を取り付ける取付構造について図面を参照して説明する。
図11は、操作部22に取り付けられた可動部材96を一方向側から見た拡大斜視図であって、可動部材96の一端側に備えられた第1の軸受部162を特に示した斜視図である。また、図12は、操作部22に取り付けられた可動部材96を他方向側から見た拡大斜視図であって、可動部材96の他端側に備えられた第2の軸受部164を特に示した斜視図である。図13は、図12の13−13線に沿った操作部22の断面図である。
図11から図13に示すように、可動部材96は、平板状の梁部160と、梁部160の一端側に設けられた第1の軸受部162と、梁部160の他端側に設けられた第2の軸受部164とを備え、全体としてU字形状に構成されている。
ここで、前述した第1の軸受部162とスリーブ156との連結構造について説明する。
図13に示すように、第1の軸受部162には、操作部22に対向する内側面162Aに有底の凹部163が形成されている。この凹部163は、操作部22に対面する側に開口を有し、この開口を介してスリーブ156が凹部163に収容されている。これにより、スリーブ156が外部に露出することなく第1の軸受部162によって覆われている。また、既述のOリング158は、スリーブ156の外周面と凹部163の内周面との間に配置されている。これにより、スリーブ156が配置される凹部163の内部空間の水密性が確保されている。
このような実施形態の連結構造に対して、例えば、第1の軸受部162に貫通孔を形成し、この貫通孔に回転軸152を貫通させて回転軸152と第1の軸受部162とをネジ(不図示)によって連結する連結構造の場合、貫通孔の内周面及びネジが外部に露出する。このため、貫通孔の内周面及びネジを洗浄するのに手間がかかる。
これに対して、実施形態の連結構造は、回転軸152、スリーブ156及び凹部163が外部に露出しない構造なので、第1の軸受部162の洗浄性を向上させることができる。
したがって、実施形態の連結構造によれば、従来の内視鏡と比較して、内視鏡10の洗浄性を向上させることができる。なお、第1の軸受部162の外側面162Bは、洗浄性を向上させるために平滑面とすることが好ましい。
次に、第2の軸受部164と操作部22との連結構造について説明する。
第2の軸受部164は、操作部22に対向する内側面164Aから内側面164Aとは反対側の外側面164Bに向けた貫通孔165を有している。貫通孔165には、ネジとして構成された従動軸168が挿入され、従動軸168は、操作部22に形成されたネジ穴21に締結されて固定される。これにより、第2の軸受部164は、従動軸168を介して操作部22に軸支される。
第2の軸受部164において、貫通孔165の外側面164B側の開口部には、ゴム等の弾性部材で構成されたキャップ部材167が装着され、貫通孔165がキャップ部材167によって閉塞されている。このような連結構造においても、貫通孔165と従動軸168を外部に露出していないので、内視鏡10の洗浄性が向上されている。
なお、実施形態においては、従動軸168が本発明の第2の軸部に相当し、キャップ部材167が本発明の閉塞部材に相当する。また、第2の軸受部164と操作部22との間には、筒状のスペーサ169が挿入されており、従動軸168はスペーサ169に挿入されて操作部22に固定される。なお、第1の軸受部162側のスリーブ156と第2の軸受部164側の従動軸168の各々の軸芯は同軸上に設定されている。
次に、図14から図17を参照して、操作部22に可動部材96を取り付ける取付手順について説明する。
図14は、操作部22に可動部材96を取り付ける直前の状態を示した操作部22の断面図である。図14には、スリーブ156の外周面にOリング158が装着されていることが示されている。
図15は、可動部材96の第1の軸受部162の凹部163に、スリーブ156を収容する直前の状態を示した操作部22の断面図である。図15には、第2の軸受部164の内側面164Aが操作部22に当接されて、その位置で凹部163の開口がスリーブ156に対面することが示されている。すなわち、第2の軸受部164の内側面164Aが、凹部163にスリーブ156を収容するための位置決め面として機能していることが示されている。
図16は、第1の軸受部162の凹部163に、スリーブ156を収容した状態を示した操作部22の断面図である。すなわち、図15に示した第1の軸受部162をスリーブ156に向けて押し込む作業だけで、凹部163にスリーブ156を収容することができる。以上で、第1の軸受部162を操作部22側に取り付ける取付作業が終了する。なお、図16の状態では、凹部163の水密性がOリング158によって確保される。また、第1の軸受部162がスリーブ156に向けて押し込まれる関係で、第2の軸受部164の内側面164Aが操作部22から離間した状態となっている。
図17は、第2の軸受部164の内側面164Aと操作部22との間の隙間にスペーサ169を配置した状態を示した操作部22の断面図である。
図17の如く、スペーサ169を配置した後、図13に示したように、第2の軸受部164の貫通孔165に従動軸168を挿入する。この後、従動軸168を操作部22のネジ穴21に締結し、その後、貫通孔165をキャップ部材167によって閉塞する。以上で、第2の軸受部164を操作部22側に取り付ける取付作業が終了し、可動部材96を操作部22に取り付ける取付作業が終了する。
先の説明と重複するが、操作部22に取り付けられた可動部材96は、第1の軸受部162においてはネジを挿入するための貫通孔が存在せず、また、第2の軸受部164においては従動軸168を挿入するための貫通孔165が存在するが、その貫通孔165はキャップ部材167によって封止されている。このため、可動部材96の洗浄性が向上し、結果として内視鏡10の洗浄性が向上されている。
次に、上記の洗浄性が向上された内視鏡10において、ワイヤ60の基端を可動部材96に取り付けるための取付構造に関し、以下に示す複数の実施形態を例示して説明する。
図18から図22には、第1実施形態の取付構造170が示されている。
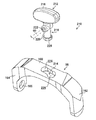
図18は、操作部22の他方の側面22Bから取付構造170を見た斜視図である。また、図19は、図18に示した取付構造170を左側から見た斜視図である。また、図20は、ワイヤ60とワイヤ60の基端に設けられた取付部材98とを備えたワイヤ組立体172の斜視図である。図21は、取付部材98の正面図であり、図22は、導入口94と可動部材96とを有する延設部36の斜視図である。
図22に示すように、可動部材96には、取付部材98(図21参照)が着脱自在に係合される係合穴174が備えられる。係合穴174は、可動部材96の梁部160の長手方向に沿って形成されており、梁部160の表裏面を貫通した貫通穴によって構成される。この係合穴174に取付部材98の一対の係合部176、176(図21参照)が着脱自在に係合される。
図21に示す取付部材98は、略三角形状の板状体であり、中央部の芯部178にワイヤ60の基端が連結される穴部180が形成される。取付部材98の一対の係合部176、176は、芯部178の両側にスリット状の切欠き182を介して設けられている。また、一対の係合部176、176には、係合穴174に弾性変形して係合する弾性変形部184がそれぞれ形成されている。また、弾性変形部184、184には、係合穴174の長手方向の両側の縁部175、175(図22参照)に係止する爪部186がそれぞれ形成される。これら爪部186、186は、係合穴174と係合部176、176とを係合又は係合解除する際に、弾性変形部184、184の弾性変形により互いに近づく方向に変位される。
次に、第1実施形態の取付構造170によって、ワイヤ60の基端を可動部材96に取り付ける取付手順について説明する。
まず、ワイヤ60の基端を可動部材96に取り付ける前に、ワイヤ60の先端を起立台30に連結する作業を行う。
図23には、導入口94からワイヤ60を、係合部材100(図20参照)を先頭にして挿入している図が示されている。
すなわち、起立台30を起立位置に位置させた状態(図3参照)で、図23の如く、導入口94からワイヤ60を、係合部材100を先頭に導入していくと、係合部材100はワイヤチャンネル62(図2参照)を介して導出口74から外部に導出される。そして、係合部材100は、継続するワイヤ60の導入操作によって、図3の係合用誘導部106により起立台30の収容溝102の開口104に向けて誘導されていき、開口104から収容溝102に係合される。この作業によって、ワイヤ60の先端を起立台30に連結することができる。
図24は、ワイヤ60の先端が起立台30に連結された状態における取付部材98の姿勢が示されている。この姿勢で、係合穴174の両側の縁部175、175(図23参照)に、爪部186、186(図21参照)の下部のテーパ部187、187を当接して取付部材98を係合穴174に押し込む。この押し込み動作によって、爪部186、186の間の間隔が狭くなり、爪部186、186が係合穴174の両側の縁部175、175に係止する。これにより、図25に示す連結図の如く、可動部材96に取付部材98が連結される。
よって、第1実施形態の取付構造170によれば、可動部材96の係合穴174に取付部材98の爪部186、186を押し込む作業だけで、ワイヤ60の基端を可動部材96にワンタッチで取り付けることができる。
この後、図1の起立操作レバー20を操作すると、図19に示すように、可動部材96が矢印C方向又は矢印D方向に動作する。そして、可動部材96の動作に連動して、ワイヤ60が取付部材98を介して可動部材96に押し引き操作される。これにより、起立台30が起立位置と倒伏位置との間で回動される。
ところで、内視鏡10は、各種の検査又は処置に使用される。その後において、内視鏡10を洗浄する場合には、以下の作業を実施する。
まず、図2に示したキャップ部材76を先端部材28から取り外す。次に、取付部材98の係合部176、176を手指で摘まみ、爪部186、186の間の間隔を係合穴174の長手方向の寸法より小さくなるように狭めた後、係合穴174から爪部186、186を引き抜く。
よって、第1実施形態の取付構造170によれば、係合穴174から爪部186、186を引き抜く作業だけで、ワイヤ60の基端を可動部材96から取り外すことができる。
次に、延設部36の導入口94からワイヤ60を押し込み操作して、起立台30を図3の起立位置から図2の倒伏位置に位置させる。この後、ワイヤ60をさらに押し込み操作して、係合部材100を、収容溝102から開口104の外方に離脱させる。この作業によって、ワイヤ60の先端を起立台30から取り外すことができる。次に、ワイヤ60を導入口94から引き出してワイヤチャンネル62を空にする。その後、先端部材28、起立台30、及びワイヤチャンネル62の洗浄を実施する。
以上の如く、第1実施形態の取付構造170によれば、操作部22の外部において、可動部材96の係合穴174に取付部材98の爪部186、186を押し込む作業だけで、ワイヤ60の基端を可動部材96に取り付けることができる。また、操作部22の外部において、可動部材96の係合穴174から取付部材98の係合部176、176を引き抜く作業だけで、ワイヤ60の基端を可動部材96から取り外すことができる。
したがって、第1実施形態の取付構造170によれば、従来の内視鏡と比較して、起立操作機構120(図9及び図10参照)に対するワイヤ60の基端の着脱操作を容易に行うことができる。
また、実施形態の内視鏡10は、図13に示したように、操作部22に対する可動部材96の取付構造により内視鏡10の洗浄性が向上されている。
以上により、第1実施形態の取付構造170を有する実施形態の内視鏡10によれば、起立操作機構120に対するワイヤ60の基端の着脱操作を容易に行いつつ、内視鏡10の洗浄性を向上させることができる。
なお、第1実施形態の取付構造170では、可動部材96に係合穴174を形成し、取付部材98に係合部176を形成したが、可動部材96に係合部176を形成し、取付部材98に係合穴174を形成してもよい。すなわち、可動部材96と取付部材98とのいずれか一方には係合穴174が設けられ、他方には係合穴174に着脱自在に係合する係合部176が設けられていればよい。更に、爪部186は、可動部材96の梁部160の長手方向側でなく、短手方向側に設けてもよい。更にまた、係合穴174は、梁部160の長手方向に互いに離間して形成された二つの係合穴であってもよい。また、係合穴174は、梁部160の表裏面を貫通していない凹状の非貫通穴でもよい。
また、前述の例では、ワイヤチャンネル62を空にするために、ワイヤ60を導入口94から引き出すとしたが、これに限定されない。たとえば、ワイヤチャンネル62からのワイヤ60の引き出しに先立って、ワイヤ60の基端を取付部材98から取り外せば、ワイヤ60を導出口74から引き出すことができる。
図26は、図18から図25に示した取付構造170の変形例の取付構造170Aを示した斜視図である。
図26に示す取付構造170Aを説明するに当たり、図18から図25に示した取付構造170と同一又は類似の部材については同一の符号を付して説明する。なお、これ以降に説明する他の実施形態の取付構造においても同様とする。
可動部材96に形成された係合穴174Aは、円形の貫通穴である。また、取付部材98Aの係合部176Aは、係合穴174Aに挿入される筒状部177を有している。また、取付部材98Aの弾性変形部は、筒状部177の先端部に設けられたすり割り部184Aによって構成され、すり割り部184Aの外周面には爪部186Aが形成されている。
このように構成された取付構造170Aによれば、筒状部177のすり割り部184Aを係合穴174Aに挿入すると、すり割り部184Aが弾性変形により縮径する。これにより、すり割り部184Aが係合穴174Aを通過していき、すり割り部184Aが係合穴174Aを通過したときに、すり割り部184Aが元の直径に復帰する。これによって、図27に示す取付構造170Aの断面図の如く、すり割り部184Aの爪部186Aが、可動部材96の梁部160の裏面160Aに係合するので、可動部材96に取付部材98Aが連結される。
よって、取付構造170Aによれば、係合穴174Aに係合部176Aを挿入する作業だけで、ワイヤ60の基端を可動部材96に取り付けることができる。また、すり割り部184Aを指で摘まんで、すり割り部184Aを縮径させた後、すり割り部184Aを係合穴174Aから引き抜く作業だけで、ワイヤ60の基端を可動部材96から取り外すことができる。
したがって、取付構造170Aによれば、第1実施形態の取付構造170と同様に、起立操作機構120(図9及び図10参照)に対するワイヤ60の基端の着脱操作を容易に行うことができる。
以上により、取付構造170Aを有する実施形態の内視鏡10によれば、起立操作機構120に対するワイヤ60の基端の着脱操作を容易に行いつつ、内視鏡10の洗浄性を向上させることができる。
次に、図28から図30を参照して、第2実施形態の取付構造210について説明する。
図28は、取付構造210の斜視図であり、図29は、取付構造210の組立斜視図であり、図30は、取付構造210の要部断面図である。
取付構造210は、可動部材96と取付部材212とから構成される。
図29の如く、可動部材96の梁部160には、係合穴214が設けられ、取付部材212には、係合穴214に着脱自在に係合する係合部216が設けられる。また、取付部材212は、摘まみ部218と、係合部216を構成する軸部220とから構成され、軸部220に形成された穴部222にワイヤ60の基端が連結されている。
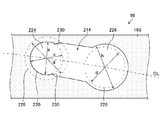
ここで、係合穴214の形状について説明する。図31は、係合穴214の平面図であり、係合穴214の形状に係合部216の拡径部228(図29参照)の形状を重畳して示している。
係合穴214は、直径aを有する幅狭部224と、直径aよりも大きい直径bを有する幅広部226とを有する。実施形態では、本発明の第1幅を直径aで説明し、本発明の第2幅を直径bで示している。なお、図31に示すように、幅狭部224の中心と幅広部226の中心とを結ぶ線CLは、導入口94(不図示)を中心とする円弧に沿った曲線である。幅狭部224と幅広部226との配置は、取付部材212を係合穴214に係合する際の操作を容易にしている。これについては後述する。
図29に示した取付部材212の係合部216は、図31の直径a以下の外径cを有する軸部220と、軸部220の先端に設けられた拡径部228とを有する。直径aと外径cとの差を小さくすることにより、軸部220を幅狭部224に安定して保持させることができる。拡径部228は、直径aよりも大きく且つ直径bより小さい外径dを有している。この拡径部228は、幅狭部224から軸部220が、軸部220の軸方向に離脱することを規制する抜け止め部材として機能する。
係合穴214は、幅狭部224と幅広部226との間に摩擦抵抗部230を有する。この摩擦抵抗部230は、幅狭部224の開口入口部に設けられ、且つ係合穴214の互いに対向する壁面から突出するよう形成されている。摩擦抵抗部230は、幅狭部224に挿入された軸部220が、幅狭部224から幅広部226に不用意にスライドすることを規制する規制部材として機能する。
このように構成された取付構造210によれば、まず、係合部216を幅広部226に挿入する。次いで、取付部材212を幅広部226から幅狭部224に向けてスライド移動する。その際、図28に示すように、取付部材212はワイヤ60に固定されているので、取付部材212は導入口94を中心とする曲線CLに沿って移動する。上述したように幅狭部224と幅広部226のそれぞれの中心は曲線CL上にあるので、取付部材212は幅広部226から幅狭部224に向けて円滑にスライドする。また、幅広部226から幅狭部224に向けて係合部216をスライドさせると、軸部220が摩擦抵抗部230に当接するが、係合部216をスライドさせる力によって係合部216を幅狭部224に問題なく係合させることができる。これにより、可動部材96に取付部材212が連結される。
よって、第2実施形態の取付構造210によれば、係合部216を幅狭部224に係合させる作業だけで、ワイヤ60の基端を可動部材96に取り付けることができる。
また、係合部216を幅狭部224に係合させた状態において、幅狭部224から軸部220が、軸部220の軸方向に離脱することを拡径部228によって防止することができる。また、軸部220が摩擦抵抗部230に当接することで、係合部216が幅狭部224から幅広部226に向けてスライドすることを規制することができる。これにより、取付部材212を可動部材96に確実に連結することができる。
一方、内視鏡10の洗浄時に、ワイヤ60の基端を可動部材96から取り外す場合には、係合部216を幅狭部224から幅広部226にスライドさせて、幅広部226から係合部216を引き抜く。
よって、第2実施形態の取付構造210によれば、係合部216を幅広部226から引き抜く作業だけで、ワイヤ60の基端を可動部材96から取り外すことができる。
したがって、第2実施形態の取付構造210によれば、第1実施形態の取付構造170と同様に、起立操作機構120(図9及び図10参照)に対するワイヤ60の基端の着脱操作を容易に行うことができる。
以上により、第2実施形態の取付構造210を有する実施形態の内視鏡10によれば、起立操作機構120に対するワイヤ60の基端の着脱操作を容易に行いつつ、内視鏡10の洗浄性を向上させることができる。
なお、図31では、摩擦抵抗部230を備えた係合穴214を例示したが、摩擦抵抗部230を備えていない係合穴214であってもよい。
次に、図32及び図33を参照して、第3実施形態の取付構造232について説明する。
図32は、取付構造232の組立斜視図である。図33は、可動部材96に形成された係合穴214の平面図であり、係合穴214の形状に、取付部材234の係合部236の拡径部238の形状を重畳させて示している。なお、取付構造232を説明するに当たり、図28から図31に示した取付構造210と同一又は類似の部材については同一の符号を付して説明する。
図33に示すように、係合穴214は、直径aを有する幅狭部224と、直径aよりも大きい直径bを有する幅広部226とを有する。幅狭部224と幅広部226とは、図31と同様に位置関係にある。
また、図32に示した取付部材234の係合部236は、直径a以下の外径cを有する軸部220と、軸部220の先端に設けられ、直径bよりも外径fが大きく且つ複数(例えば4本)のすり割り溝237(図32参照)が形成された拡径部238とを有している。拡径部238は、拡径部238が幅広部226に挿入される際に、複数のすり割り溝237によって弾性変形して縮径する。
このように構成された取付構造232によれば、係合穴214の幅広部226に拡径部238を嵌装すると、拡径部238が複数のすり割り溝237によって弾性変形して縮径する。これにより、拡径部238が幅広部226を通過していき、拡径部238が幅広部226を通過したときに、拡径部238が元の直径に復帰する。これによって、拡径部238が、可動部材96の梁部160の裏面160Aに係合するので、可動部材96からの取付部材234の抜けが防止される。
その後、係合部236を幅狭部224に向けてスライドさせて、係合部236を幅狭部224に係合させる。これにより、可動部材96に取付部材234が連結される。
よって、第3実施形態の取付構造232によれば、係合部236を幅狭部224に係合させる作業だけで、ワイヤ60の基端を可動部材96に取り付けることができる。
また、係合部236を幅狭部224に係合させた状態において、幅狭部224から軸部220が、軸部220の軸方向に離脱することを拡径部238によって防止することができる。また、軸部220が摩擦抵抗部230に当接することで、係合部236が幅狭部224から幅広部226に向けてスライドすることを規制することができる。これにより、取付部材234を可動部材96に確実に連結することができる。
一方、内視鏡10の洗浄時に、ワイヤ60の基端を可動部材96から取り外す場合には、取付部材234の係合部236を幅狭部224から幅広部226にスライドさせ、その後、拡径部238を指で摘まみ、拡径部238を縮径させて、拡径部238を幅広部226から引き抜く。
よって、第3実施形態の取付構造232によれば、拡径部238を幅広部226から引き抜く作業だけで、ワイヤ60の基端を可動部材96から取り外すことができる。
したがって、第3実施形態の取付構造232によれば、第1実施形態の取付構造170と同様に、起立操作機構120(図9及び図10参照)に対するワイヤ60の基端の着脱操作を容易に行うことができる。
以上により、第3実施形態の取付構造232を有する実施形態の内視鏡10によれば、起立操作機構120に対するワイヤ60の基端の着脱操作を容易に行いつつ、内視鏡10の洗浄性を向上させることができる。
なお、図33では、摩擦抵抗部230を備えた係合穴214を例示したが、摩擦抵抗部230を備えていない係合穴214であってもよい。
次に、図34及び図35を参照して、第4実施形態の取付構造240について説明する。
図34は、取付構造240の斜視図であり、図35は、取付構造210の組立斜視図である。
取付構造240は、可動部材242と取付部材244とから構成される。
可動部材242は、第1の軸受部162と、第2の軸受部164と、第1の軸受部162と第2の軸受部164とを連結する円筒体246と、から構成される。この円筒体246は、ワイヤ60の軸線方向に垂直な方向(X(+)−X(−)方向)に延在されている。また、図34及び図35において、第1の軸受部162と第2の軸受部164の上端部には、回転規制ストッパを構成するU字状の溝248、250が形成されている。なお、この可動部材242においても、図13に示した可動部材96と同様な取付構造にて操作部22に取り付けられている。
一方、取付部材244には、ワイヤ60の基端が連結されている。取付部材244は、円筒体246の外周に回転自在に係合する環状体252と、溝248、250とともに回転規制ストッパを構成するピン254、256と、から構成される。環状体252は、長手方向に直交する断面がC字形状に構成されており、長手方向に形成されているスリット253を円筒体246に押し付けることにより、拡径して円筒体246に係合する。
このように構成された取付構造240によれば、取付部材244の環状体252のスリット253を、可動部材242の円筒体246に押し付けて、環状体252を円筒体246に係合させる。
よって、第4実施形態の取付構造240によれば、環状体252を円筒体246に係合させる作業だけで、ワイヤ60の基端を可動部材242に取り付けることができる。
また、環状体252が円筒体246に係合すると、これと同時に溝248にピン254が係合され、且つ溝250にピン256が係合されるので、可動部材242によるワイヤ60の押し引き操作時に、円筒体246に対して環状体252が相対回転することを防止することができる。これにより、ワイヤ60を円滑に押し引き操作することができる。
一方、内視鏡10の洗浄時に、ワイヤ60の基端を可動部材242から取り外す場合には、溝248、250からピン254、256を取り外す方向に取付部材244を引っ張ると、環状体252が円筒体246に押されて拡径し、環状体252が円筒体246から離脱する。
よって、第4実施形態の取付構造240によれば、取付部材244を引っ張る作業だけで、ワイヤ60の基端を可動部材96から取り外すことができる。
したがって、第4実施形態の取付構造240によれば、第1実施形態の取付構造170と同様に、起立操作機構120(図9及び図10参照)に対するワイヤ60の基端の着脱操作を容易に行うことができる。
以上により、第4実施形態の取付構造240を有する実施形態の内視鏡10によれば、起立操作機構120に対するワイヤ60の基端の着脱操作を容易に行いつつ、内視鏡10の洗浄性を向上させることができる。
なお、上記の実施形態では、可動部材242に円筒体246を設け、取付部材244に環状体252を設けたが、可動部材242と取付部材244とのいずれか一方に円筒体246を設け、他方に環状体252を設ければよい。
次に、図36から図38を参照して、第5実施形態の取付構造270について説明する。
図36は、取付構造270の斜視図、図37及び図38は、取付構造270の組立斜視図である。
図37に示すように、取付構造270は、可動部材96と取付部材272とから構成される。
取付部材272には、ワイヤ60の軸線方向に垂直な方向に延在する軸部274と、軸部274の長手軸gに垂直な方向hに延在する連結部276と、連結部276の軸部274と反対側に設けられた係止部278と、が設けられている。
可動部材96の梁部160には、軸部274が挿入される装着穴280と、係止部278が係止される係止溝部282とが設けられている。装着穴280は、ワイヤ60の軸線方向に沿って形成されており、その軸線方向に沿った装着穴280の長さjは、軸部274の直径kと連結部276の長さmとを足した長さよりも長く設定されている。
係止部278は、装着穴280の奥深くに軸部274が挿入された図38の状態で軸部274の長手軸gを中心に軸部274を回転させたときに、図36の如く係止溝部282に係止される。また、図37の如く、梁部160には、装着穴280に貫通した切欠部284が形成される。図36の如く、係止部278が係止溝部282に係止されたとき、連結部276は、切欠部284を介して装着穴280に収容される。
また、図37の如く、連結部276には、連結部276の延在方向である方向hに沿ったワイヤ溝部286が設けられている。ワイヤ溝部286は、係止部278を係止溝部282に係止させたときにワイヤ60を収容する。
このように構成された取付構造270によれば、軸部274を装着穴280に挿入し、軸部274の長手軸gを中心に軸部274を回転させて、係止部278を係止溝部282に係止する。
よって、第5実施形態の取付構造270によれば、装着穴280に軸部274を挿入して軸部274を回転させる作業だけで、ワイヤ60の基端を可動部材96に取り付けることができる。
一方、内視鏡10の洗浄時に、ワイヤ60の基端を可動部材96から取り外す場合には、係止部278を指で摘まんで係止溝部282から取り外し、軸部274を装着穴280から引き抜く。
よって、第5実施形態の取付構造270によれば、係止部278を係止溝部282から取り外し、軸部274を装着穴280から引き抜く作業だけで、ワイヤ60の基端を可動部材96から取り外すことができる。
したがって、第5実施形態の取付構造270によれば、第1実施形態の取付構造170と同様に、起立操作機構120(図9及び図10参照)に対するワイヤ60の基端の着脱操作を容易に行うことができる。
以上により、第5実施形態の取付構造270を有する実施形態の内視鏡10によれば、起立操作機構120に対するワイヤ60の基端の着脱操作を容易に行いつつ、内視鏡10の洗浄性を向上させることができる。
次に、図39及び図40を参照して、第6実施形態の取付構造290について説明する。
図39は、取付構造290の斜視図、図40は、取付構造290の組立斜視図である。
図40に示すように、取付構造290は、可動部材96と取付部材292とから構成される。
取付部材292には、一対の爪部294A、294Bと、一対の爪部294A、294Bを互いに近づける方向に付勢するバネ296と、バネ296の付勢力に抗して一対の爪部294A、294Bを互いに遠ざかる方向に移動させるための一対の摘まみ部298A、298Bとが設けられている。なお、バネ296が、本発明の付勢部材に相当する。
爪部294Aと摘まみ部298Aは一体に構成され、同様に爪部294Bと摘まみ部298Bは一体に構成され、軸300を介して互いに軸支されている。この軸300にワイヤ60の基端が固定されている。
可動部材96の梁部160には、バネ296の付勢力により一対の爪部294A、294Bが装着される一対の装着穴302A、302Bが設けられている。
このように構成された取付構造290によれば、一対の摘まみ部298A、298Bを摘まんで一対の爪部294A、294Bの間隔を広げ、一対の爪部294A、294Bを一対の装着穴302A、302Bに挿入し、一対の爪部294A、294Bから指を離す。これにより、一対の摘まみ部298A、298Bが一対の装着穴302A、302Bにバネ296の付勢力により係止する。
よって、第6実施形態の取付構造290によれば、一対の摘まみ部298A、298Bを一対の装着穴302A、302Bに係止させる作業だけで、ワイヤ60の基端を可動部材96に取り付けることができる。
一方、内視鏡10の洗浄時に、ワイヤ60の基端を可動部材96から取り外す場合には、一対の摘まみ部298A、298Bを摘まんで一対の爪部294A、294Bの間隔を広げ、一対の爪部294A、294Bを一対の装着穴302A、302Bから取り外す。
よって、第6実施形態の取付構造290によれば、一対の摘まみ部298A、298Bを一対の装着穴302A、302Bから取り外す作業だけで、ワイヤ60の基端を可動部材96から取り外すことができる。
したがって、第6実施形態の取付構造290によれば、第1実施形態の取付構造170と同様に、起立操作機構120(図9及び図10参照)に対するワイヤ60の基端の着脱操作を容易に行うことができる。
以上により、第6実施形態の取付構造290を有する実施形態の内視鏡10によれば、起立操作機構120に対するワイヤ60の基端の着脱操作を容易に行いつつ、内視鏡10の洗浄性を向上させることができる。
次に、図41から図43を参照して、第7実施形態の取付構造310について説明する。
図41は、取付構造310の斜視図であり、図42及び図43は、取付構造310の組立斜視図である。
図42に示すように、取付構造310は、可動部材96と取付部材312とから構成される。
可動部材96の梁部160には、固定軸部316が設けられている。また、取付部材312は板状に構成され、固定軸部316に嵌合される固定穴318が設けられている。
また、取付部材312には抜け止め孔320が設けられており、可動部材96には、抜け止め孔320に嵌合される抜け止め部322が設けられている。この抜け止め部322は軸状に構成される。また、抜け止め部322は、ポリプロピレン等の軟質の樹脂シート324に一体に設けられるとともに、樹脂シート324を介して梁部160に連結されている。
このように構成された取付構造310によれば、図43の如く固定軸部316に固定穴318を嵌合し、図41の如く抜け止め孔320に抜け止め部322を嵌合する。
よって、第7実施形態の取付構造310によれば、固定軸部316に固定穴318を嵌合し、抜け止め孔320に抜け止め部322を嵌合する作業だけで、ワイヤ60の基端を可動部材96に取り付けることができる。
一方、内視鏡10の洗浄時に、ワイヤ60の基端を可動部材96から取り外す場合には、抜け止め孔320から抜け止め部322を引き抜き、固定軸部316から固定穴318を引き抜く。
よって、第7実施形態の取付構造310によれば、抜け止め孔320から抜け止め部322を引き抜いた後、固定軸部316から固定穴318を引き抜く作業だけで、ワイヤ60の基端を可動部材96から取り外すことができる。
したがって、第7実施形態の取付構造310によれば、第1実施形態の取付構造170と同様に、起立操作機構120(図9及び図10参照)に対するワイヤ60の基端の着脱操作を容易に行うことができる。
以上により、第7実施形態の取付構造310を有する実施形態の内視鏡10によれば、起立操作機構120に対するワイヤ60の基端の着脱操作を容易に行いつつ、内視鏡10の洗浄性を向上させることができる。
なお、取付構造310では、可動部材96に固定軸部316を設け、取付部材312に固定穴318を設けたが、これに限定されず、可動部材96に固定穴318を設け、取付部材312に固定軸部316を設けてもよい。
また、取付構造310では、取付部材312に抜け止め孔320を設け、可動部材96に抜け止め部322を設けたが、これに限定されず、取付部材312に抜け止め部322を設け、可動部材96に抜け止め孔320を設けてもよい。
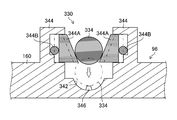
次に、図44及び図47を参照して、第8実施形態の取付構造330について説明する。
図44は、取付構造330の斜視図であり、図45は、取付構造330の組立斜視図である。また、図46は、取付構造330の要部構成を示した断面図であり、図47は、後述する軸部334が押し当て部346によって破断される状態を示した説明図である。
図45に示すように、取付構造310は、可動部材96と取付部材332とから構成される。
取付部材332には、ワイヤ60の軸線方向に延在する軸部334と、軸部334の長手軸方向の中央部に形成された小径部336と、軸部334の一方の端部に設けられた第1係止部338と、軸部334の他方の端部に設けられた第2係止部340とが設けられている。
第1係止部338は、軸部334の直径よりも大径のストッパ部338Aと、ストッパ部338Aに形成された摘まみ部338Bとを有している。また、第2係止部340も同様に、軸部334の直径よりも大径のストッパ部340Aと、ストッパ部340Aに形成された摘まみ部340Bとを有している。
可動部材96の梁部160には、軸部334を収容する固定溝342と、固定溝342に軸部334が収容されたときに第1係止部338のストッパ部338Aと第2係止部340のストッパ部340Aとに当接されて軸部334の長手軸方向の移動を規制する抜け止め部344と、固定溝342に形成されて固定溝342に軸部334が収容されたときに軸部334の中央部に当接される凸状の押し当て部346(図46参照)とが設けられる。
図46の如く、抜け止め部344は、軸部334の長手方向に沿って互いに隙間をもって配置された一対の抜け止め片344A、344Aと、一対の抜け止め片344A、344Aを互いに近づく方向に付勢する一対の弾性部材344B、344Bと、を有している。なお、弾性部材344Bが本発明の付勢部材に相当する。
このように構成された取付構造330によれば、摘まみ部338B、340Bを指で摘まんで軸部334を、一対の抜け止め片344A、344Aの間の隙間から弾性部材344B、344Bの付勢力に抗して固定溝342に収容する。これにより、軸部334の軸方向の移動が抜け止め部344によって規制され、軸部334の固定溝343からの抜けが一対の抜け止め片344A、344Aによって防止される。
よって、第8実施形態の取付構造330によれば、軸部334を固定溝342に収容する作業だけで、ワイヤ60の基端を可動部材96に取り付けることができる。
一方、内視鏡10の洗浄時に、ワイヤ60の基端を可動部材96から取り外す場合には、摘まみ部338B、340Bを摘まんで軸部334を固定溝342に向けて押圧する。これにより、小径部336が押し当て部346に押圧され、小径部336が図47の如く破断して軸部334が2本の軸部334A、334Aに分割される。この後、2本の軸部334A、334Aを固定溝342から各々の軸方向に引き抜く。
よって、第8実施形態の取付構造330によれば、軸部334を2本の軸部334A、334Aに分割し、2本の軸部334A、334Aを固定溝342から引き抜く作業だけで、ワイヤ60の基端を可動部材96から取り外すことができる。
したがって、第8実施形態の取付構造330によれば、第1実施形態の取付構造170と同様に、起立操作機構120(図9及び図10参照)に対するワイヤ60の基端の着脱操作を容易に行うことができる。
以上により、第8実施形態の取付構造330を有する実施形態の内視鏡10によれば、起立操作機構120に対するワイヤ60の基端の着脱操作を容易に行いつつ、内視鏡10の洗浄性を向上させることができる。
上記の実施形態によって、本発明の可動部材に対する取付部材の取付構造の具体例を説明したが、本発明は、上記の実施形態に限定されるものではなく、本発明の範囲であれば、上記の実施形態に種々の変形及び置換を加えることができる。
上記の実施形態では、内視鏡10として十二指腸鏡を例示して説明したが、挿入部の先端部に処置具の導出方向を調整する起立台を備える内視鏡であれば、超音波内視鏡等の各種内視鏡に本発明を適用することができる。