JP6885509B2 - 画像処理装置、画像処理方法及び画像処理プログラム - Google Patents
画像処理装置、画像処理方法及び画像処理プログラム Download PDFInfo
- Publication number
- JP6885509B2 JP6885509B2 JP2020513656A JP2020513656A JP6885509B2 JP 6885509 B2 JP6885509 B2 JP 6885509B2 JP 2020513656 A JP2020513656 A JP 2020513656A JP 2020513656 A JP2020513656 A JP 2020513656A JP 6885509 B2 JP6885509 B2 JP 6885509B2
- Authority
- JP
- Japan
- Prior art keywords
- cloud
- shadow
- pixel
- pixels
- altitude
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/90—Dynamic range modification of images or parts thereof
- G06T5/94—Dynamic range modification of images or parts thereof based on local image properties, e.g. for local contrast enhancement
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/12—Edge-based segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/40—Analysis of texture
- G06T7/41—Analysis of texture based on statistical description of texture
- G06T7/45—Analysis of texture based on statistical description of texture using co-occurrence matrix computation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10032—Satellite or aerial image; Remote sensing
- G06T2207/10036—Multispectral image; Hyperspectral image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20076—Probabilistic image processing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Computing Systems (AREA)
- Mathematical Physics (AREA)
- Probability & Statistics with Applications (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Description

rTは、整合フィルタが合わせられる標的反射である
Cは、非雲および非水の画素の共分散行列である
<<画像処理装置>>
雲を抜ける通路を除き、太陽から地面までの経路上の大気透過率を1つと見なすと、直接太陽放射(ts)の減衰は、その経路に沿った雲の透過率によって決定されることになる。遮蔽雲の透過率を推定し、それを影除去に用いることにより、補正の精度を向上させることができる。第1の実施形態において、遮蔽雲の透過率から直接太陽放射(ts)の減衰率を推定して正確な影除去結果を得る画像処理装置が説明される。
Ct=1−g (3)
として与えられ、式中、「g」は、雲の相対厚さ係数である。係数gは、厚い雲に対する雲の相対厚さに従って0〜1まで変化する。g=1の場合、これは厚い雲を意味する。これらの雲は、透過率が0である不透明の雲である。本方法は、雲をエンドメンバと仮定し、画素を成分分離して、gで近似される雲存在量(画素内の相対的比率)を得る。エンドメンバは、画像内の純粋な土地被覆クラスを表す。土地被覆クラス(エンドメンバ)の選択は、用途に依存する。例えば、変化検出用途では、エンドメンバは、植生、水などである一方、植生モニタリングにおいては、エンドメンバは、スギまたはヒノキであり得る。非特許文献2内のモデルは、gを決定するために線形分離技法を適用する。成分分離のため、雲透過率計算部12は、雲スペクトルを抽出する。複数の雲クラスが画像内に存在する場合、雲透過率計算部12は、複数の雲スペクトルを抽出する。
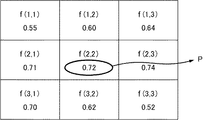
Pav=f(1,1)*g(1,1)+f(1,2)*g(1,2)+、…、+f(3,2)*g(3,2)+f(3,3)*g(3,3)
=0.55/9+0.60/9+0.64/9+0.71/9+0.72/9+0.74/9+0.70/9+0.62/9+0.52/9
=(0.55+0.60+0.64+0.71+0.72+0.74+0.70+0.62+0.52)/9=0.64
などのように計算される。減衰率推定部16は、各画素について平均Pavを計算する。すべての画素についての計算の結果として、図7に示されるような行列が、図4の雲透過率値から得られる。図7の行列内の値は、それぞれの画素についての直接太陽放射の減衰率を示す。
<<画像処理装置の動作>>
まず、ステップS101において、雲透過率計算部12は、式(5)によって、受信したマルチスペクトル画像(I)をグレースケール強度画像(Im)に変換する。式中、i=1、…、Rであり、j=1、…、Cである(kは、入力画像内の波長域に対応する変数である)。
<第1の実施形態例の効果>
第1の実施形態例において、画像処理装置100は、雲影で被覆された画素を検出し、それらを補正して、遮蔽雲の光学特性を使用することにより真の地面反射を正確に取得することができる。検出および補正の精度は、入力画像自体から入力画像内の雲の高度を推定することによってさらに向上され得る。画像内で、雲によって投じられた影画素を、雲の光学特性に基づいて補正するには、影画素と遮蔽雲の画素との正確な対応を確立することが必要不可欠である。この対応は、遮蔽雲の高度の推定が正しい場合にのみ正確である。第2の実施形態では、ドメイン知識なしに画像自体から画像内の遮蔽雲の高度を見出すことができる画像処理装置が説明される。
<<画像処理装置>>
<<画像処理装置の動作>>
<第2の実施形態の効果>
本発明に従う第3の実施形態の画像処理装置300は、第1および第2の実施形態例に従う画像処理装置の最小構成を含む。
<情報処理装置の構成>
− CPU901(Central_Processing_Unit)、
− ROM902(Read_Only_Memory)、
− RAM903(Random_Access_Memory)、
− ハードディスク904(ストレージデバイス)、
− 外部デバイスへの通信インターフェース905;
− CD−ROM(Compact_Disc_Read_Only_Memory)などの記憶媒体907に記憶されたデータを読みこむことまたはそれに書き込むことができるリーダ/ライタ908、および
−入力/出力インターフェース909。
<付記>
(付記1)
1つまたは複数の雲によって引き起こされる影響の検出および補正のための画像処理装置であって、
各画素について、入力画像内の前記1つまたは複数の雲の透過率を計算するための雲透過率計算手段と、
対応する1つまたは複数の影の位置を検出するために、前記各画素について前記入力画像における地面から各雲までの高度を推定する雲高度推定手段と、
各画素について、計算された前記雲の透過率に平均化フィルタを適用することによって直接太陽放射の減衰率を計算するための減衰率推定手段と、
計算された前記減衰率および前記位置を用いることにより雲影形成の物理モデルに基づいて、前記1つまたは複数の影によって影響を受けた画素を補正し、補正された前記画素を含む画像を出力することによって、前記1つまたは複数の影を除去するための影除去手段と
を備える、画像処理装置。
(付記2)
各雲クラスの高度を含む、雲クラスを分類するための雲情報を記憶するための雲データ記憶装置と、
前記雲データ記憶装置に記憶された前記雲情報に基づいて、雲によって影響を受けた前記各画素を雲クラスのうちの1つに分類するための雲分類手段と
をさらに備え、
前記雲高度推定手段が、前記雲データ記憶装置に記憶された前記雲クラスの各々に対応する前記高度を推定する、
付記1に記載の画像処理装置。
(付記3)
前記雲高度推定手段によって得られた前記各雲の高度を用いることにより幾何モデルに基づいて、前記入力画像内の雲画素に対応する前記入力画像上の影画素を検出するための影検出手段をさらに備える、
付記1または2に記載の画像処理装置。
(付記4)
各雲の空間およびスペクトル特性に基づいて、前記入力画像内の前記1つまたは複数の雲によって影響を受けた可能性のある画素を含む雲マップを検出するための雲マップ検出手段と、
前記雲マップ内の前記1つまたは複数の雲によって影響を受けた可能性のある前記画素に対応する1つまたは複数の雲オブジェクトを検出するための雲オブジェクト検出手段と
をさらに備える、付記1に記載の画像処理装置。
(付記5)
各影の空間およびスペクトル特性に基づいて、雲に対応する影によって被覆された画素を含む影マップを検出するための影マップ検出手段と、
推定された前記各雲の高度を用いることにより幾何モデルに基づいて、前記影マップ内の前記影によって被覆された前記画素に対応する影オブジェクトを検出するための影オブジェクト検出手段と
をさらに備える、付記1または4に記載の画像処理装置。
(付記6)
前記影オブジェクトの領域境界を含めるために構造要素を適用し影オブジェクトの領域を空間的に拡大する影オブジェクト拡大手段をさらに備える、
付記1、4および5のいずれか一項に記載の画像処理装置。
(付記7)
1つまたは複数の雲によって引き起こされる影響の検出および補正のための画像処理方法であって、
各画素について、入力画像内の前記1つまたは複数の雲の透過率を計算することと、
対応する1つまたは複数の影の位置を検出するために、前記各画素について前記入力画像における地面から各雲までの高度を推定することと、
各画素について、計算された前記雲の透過率に平均化フィルタを適用することによって直接太陽放射の減衰率を計算することと、
計算された前記減衰率および前記位置を用いることにより雲影形成の物理モデルに基づいて、前記1つまたは複数の影によって影響を受けた画素を補正し、補正された前記画素を含む画像を出力することによって、前記1つまたは複数の影を除去することと
を含む方法。
(付記8)
雲データ記憶装置に記憶された、各雲クラスの高度を含む雲情報に基づいて、雲によって影響を受けた前記各画素を雲クラスのうちの1つに分類することをさらに含み、
高度を推定することにおいて、前記高度が、前記雲データ記憶装置に記憶された前記雲クラスの各々に対応する、
付記7に記載の方法。
(付記9)
前記雲高度推定手段によって得られた前記各雲の高度を用いることにより幾何モデルに基づいて、前記入力画像内の雲画素に対応する前記入力画像上の影画素を検出することをさらに含む、
付記7または8に記載の方法。
(付記10)
各雲の空間およびスペクトル特性に基づいて、前記入力画像内の前記1つまたは複数の雲によって影響を受けた可能性のある画素を含む雲マップを検出することと、
前記雲マップ内の前記1つまたは複数の雲によって影響を受けた可能性のある前記画素に対応する1つまたは複数の雲オブジェクトを検出することと
をさらに含む、付記7に記載の方法。
(付記11)
各影の空間およびスペクトル特性に基づいて、雲に対応する影によって被覆された画素を含む影マップを検出することと、
推定された前記各雲の高度を用いることにより幾何モデルに基づいて、前記影マップ内の前記影によって被覆された前記画素に対応する影オブジェクトを検出することと
をさらに含む、付記7または10に記載の方法。
(付記12)
前記影オブジェクトの領域境界を含めるために構造要素を適用し影オブジェクトの領域を空間的に拡大することをさらに含む、
付記7、10および11のいずれか一項に記載の方法。
(付記13)
1つまたは複数の雲によって引き起こされる影響をコンピュータに検出および補正させるための画像処理プログラムを記憶するコンピュータ可読記憶媒体であって、前記プログラムが、
各画素について、入力画像内の前記1つまたは複数の雲の透過率を計算することと、
対応する1つまたは複数の影の位置を検出するために、前記各画素について前記入力画像における地面から各雲までの高度を推定することと、
各画素について、計算された前記雲の透過率に平均化フィルタを適用することによって直接太陽放射の減衰率を計算することと、
計算された前記減衰率および前記位置を用いることにより雲影形成の物理モデルに基づいて、前記1つまたは複数の影によって影響を受けた画素を補正し、補正された前記画素を含む画像を出力することによって、前記1つまたは複数の影を除去することと、を含む
コンピュータ可読記憶媒体。
(付記14)
前記プログラムが、
雲データ記憶装置に記憶された、各雲クラスの高度を含む雲情報に基づいて、雲によって影響を受けた前記各画素を雲クラスのうちの1つに分類することをさらに含み、
高度を推定することにおいて、前記高度が、前記雲データ記憶装置に記憶された前記雲クラスの各々に対応する、
付記13に記載の記憶媒体。
(付記15)
前記プログラムが、
前記雲高度推定手段によって得られた前記各雲の高度を用いることにより幾何モデルに基づいて、前記入力画像内の雲画素に対応する前記入力画像上の影画素を検出することをさらに含む、
付記13または14に記載の記憶媒体。
(付記16)
前記プログラムが、
各雲の空間およびスペクトル特性に基づいて、前記入力画像内の前記1つまたは複数の雲によって影響を受けた可能性のある画素を含む雲マップを検出することと、
前記雲マップ内の前記1つまたは複数の雲によって影響を受けた可能性のある前記画素に対応する1つまたは複数の雲オブジェクトを検出することと
をさらに含む、付記13に記載の記憶媒体。
(付記17)
前記プログラムが、
各影の空間およびスペクトル特性に基づいて、雲に対応する影によって被覆された画素を含む影マップを検出することと、
推定された前記各雲の高度を用いることにより幾何モデルに基づいて、前記影マップ内の前記影によって被覆された前記画素に対応する影オブジェクトを検出することと
をさらに含む、付記13または16に記載の記憶媒体。
(付記18)
前記プログラムが、
前記影オブジェクトの領域境界を含めるために構造要素を適用し影オブジェクトの領域を空間的に拡大することをさらに含む、
付記13、16および17のいずれか一項に記載の記憶媒体。
2 整合フィルタ導出部
3 減衰率推定部
4 影除去部
5 出力部
10 入力部
11 雲データ記憶装置
12 雲透過率計算部
13 雲分類部
14 雲高度推定部
15 影検出部
16 減衰率推定部
17 大気モデル化部
18,18a 影除去部
19 出力部
21 雲マップ検出部
22 雲オブジェクト検出部
23 影マップ検出部
24 影オブジェクト検出部
25 雲高度推定部
26 影オブジェクト拡大部
31 雲透過率計算部
32 雲高度推定部
33 減衰率推定部
34 影除去部
100 画像処理装置
200 画像処理装置
300 画像処理装置
900 情報処理装置
901 CPU
902 ROM
903 RAM
904 ハードディスク
905 通信インターフェース
906 バス
907 記憶媒体
908 リーダ/ライタ
909 入力/出力インターフェース
Claims (8)
- 1つまたは複数の雲によって引き起こされる影響の検出および補正のための画像処理装置であって、
各画素について、入力画像内の前記1つまたは複数の雲の透過率を計算するための雲透過率計算手段と、
対応する1つまたは複数の影の位置を検出するために、前記各画素について前記入力画像における地面から各雲までの高度の推定する雲高度推定手段と、
各画素について、計算された前記雲の透過率に平均化フィルタを適用することによって直接太陽放射の減衰率を計算するための減衰率推定手段と、
計算された前記減衰率および前記位置を用いることにより雲影形成の物理モデルに基づいて、前記1つまたは複数の影によって影響を受けた画素を補正し、補正された前記画素を含む画像を出力することによって、前記1つまたは複数の影を除去するための影除去手段と
を備える、画像処理装置。 - 各雲クラスの高度を含む、雲クラスを分類するための雲情報を記憶するための雲データ記憶装置と、
前記雲データ記憶装置に記憶された前記雲情報に基づいて、雲によって影響を受けた前記各画素を雲クラスのうちの1つに分類するための雲分類手段と
をさらに備え、
前記雲高度推定手段が、前記雲データ記憶装置に記憶された前記雲クラスの各々に対応する前記高度を推定する、請求項1に記載の画像処理装置。 - 前記雲高度推定手段によって得られた前記各雲の高度を用いることにより幾何モデルに基づいて、前記入力画像内の雲画素に対応する前記入力画像上の影画素を検出するための影検出手段をさらに備える、請求項1または2に記載の画像処理装置。
- 各雲の空間およびスペクトル特性に基づいて、前記入力画像内の前記1つまたは複数の雲によって影響を受けた可能性のある画素を含む雲マップを検出するための雲マップ検出手段と、
前記雲マップ内の前記1つまたは複数の雲によって影響を受けた可能性のある前記画素に対応する1つまたは複数の雲オブジェクトを検出するための雲オブジェクト検出手段と
をさらに備える、請求項1に記載の画像処理装置。 - 各影の空間およびスペクトル特性に基づいて、雲に対応する影によって被覆された画素を含む影マップを検出するための影マップ検出手段と、
推定された前記各雲の高度を用いることにより幾何モデルに基づいて、前記影マップ内の前記影によって被覆された前記画素に対応する影オブジェクトを検出するための影オブジェクト検出手段と
をさらに備える、請求項1または4に記載の画像処理装置。 - 前記影オブジェクトの領域境界を含めるために構造要素を適用し影オブジェクトの領域を空間的に拡大する影オブジェクト拡大手段をさらに備える、請求項5に記載の画像処理装置。
- 1つまたは複数の雲によって引き起こされる影響の検出および補正のための画像処理方法であって、
各画素について、入力画像内の前記1つまたは複数の雲の透過率を計算することと、
対応する1つまたは複数の影の位置を検出するために、前記各画素について前記入力画像における地面から各雲までの高度を推定することと、
各画素について、計算された前記雲の透過率に平均化フィルタを適用することによって直接太陽放射の減衰率を計算することと、
計算された前記減衰率および前記位置を用いることにより雲影形成の物理モデルに基づいて、前記1つまたは複数の影によって影響を受けた画素を補正し、補正された前記画素を含む画像を出力することによって、前記1つまたは複数の影を除去することと
を含む画像処理方法。 - 1つまたは複数の雲によって引き起こされる影響をコンピュータに検出および補正させるための画像処理プログラムであって、
各画素について、入力画像内の前記1つまたは複数の雲の透過率を計算することと、
対応する1つまたは複数の影の位置を検出するために、前記各画素について前記入力画像における地面から各雲までの高度を推定することと、
各画素について、計算された前記雲の透過率に平均化フィルタを適用することによって直接太陽放射の減衰率を計算することと、
計算された前記減衰率および前記位置を用いることにより雲影形成の物理モデルに基づいて、前記1つまたは複数の影によって影響を受けた画素を補正し、補正された前記画素を含む画像を出力することによって、前記1つまたは複数の影を除去することと、を含む
画像処理プログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/032530 WO2019049324A1 (en) | 2017-09-08 | 2017-09-08 | IMAGE PROCESSING DEVICE, IMAGE PROCESSING METHOD, AND STORAGE MEDIUM |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020532808A JP2020532808A (ja) | 2020-11-12 |
| JP6885509B2 true JP6885509B2 (ja) | 2021-06-16 |
Family
ID=65634761
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020513656A Active JP6885509B2 (ja) | 2017-09-08 | 2017-09-08 | 画像処理装置、画像処理方法及び画像処理プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11227367B2 (ja) |
| JP (1) | JP6885509B2 (ja) |
| WO (1) | WO2019049324A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230078377A (ko) * | 2021-11-26 | 2023-06-02 | 한국항공우주연구원 | 위성 영상 편집 방법, 위성 영상 편집 장치 및 상기 방법을 실행시키기 위하여 기록매체에 저장된 컴퓨터 프로그램 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020009826A1 (en) * | 2018-07-05 | 2020-01-09 | Kaarta, Inc. | Methods and systems for auto-leveling of point clouds and 3d models |
| US10650498B2 (en) | 2018-08-02 | 2020-05-12 | Nec Corporation | System, method, and non-transitory, computer-readable medium containing instructions for image processing |
| CN112889089B (zh) * | 2018-10-19 | 2024-03-05 | 克莱米特有限责任公司 | 用于标识卫星影像中的云和云影的机器学习技术 |
| CN113436115B (zh) * | 2021-07-30 | 2023-09-19 | 西安热工研究院有限公司 | 一种基于深度无监督学习的图像阴影检测方法 |
| CN113936009B (zh) * | 2021-09-14 | 2023-11-21 | 国家卫星气象中心(国家空间天气监测预警中心) | 一种气象卫星洪涝监测的云阴影去除方法、装置及设备 |
| CN114066755B (zh) * | 2021-11-11 | 2023-02-14 | 南京航空航天大学 | 一种基于全波段特征融合的遥感影像薄云去除方法及系统 |
| CN114359232B (zh) * | 2022-01-06 | 2024-02-02 | 中国人民解放军国防科技大学 | 一种基于上下文协方差矩阵的图像变化检测方法及装置 |
| CN114563085B (zh) * | 2022-02-28 | 2023-10-20 | 中国科学院空天信息创新研究院 | 基于临近空间浮空器平台的遥感卫星传递定标方法 |
| CN115906477B (zh) * | 2022-11-21 | 2026-03-20 | 杭州电子科技大学 | 一种基于云图的雷暴云实时模拟方法 |
| CN115657013B (zh) * | 2022-12-27 | 2023-04-07 | 成都远望探测技术有限公司 | 基于激光雷达和云雷达的冰云内冰晶粒子数浓度估算方法 |
| CN117745583B (zh) * | 2023-12-21 | 2025-12-12 | 中山大学 | 一种支持路况阴影祛除的公交安全预警方法及系统 |
| CN119762696B (zh) * | 2024-12-13 | 2025-07-08 | 山东庆莱信息科技有限公司 | 一种用于测绘制图的图像数据处理方法 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5612901A (en) * | 1994-05-17 | 1997-03-18 | Gallegos; Sonia C. | Apparatus and method for cloud masking |
| JP2001143054A (ja) | 1999-11-16 | 2001-05-25 | Hitachi Ltd | 衛星画像処理方法 |
| JP3383845B2 (ja) | 2000-10-12 | 2003-03-10 | 独立行政法人通信総合研究所 | 雲微物理量導出システム,雲微物理量導出処理方法およびそのプログラム記録媒体 |
| EP1476850A1 (en) * | 2002-01-22 | 2004-11-17 | National University Of Singapore | Method for producing cloud free, and cloud-shadow free, images |
| JP3981744B2 (ja) * | 2003-11-21 | 2007-09-26 | 中部電力株式会社 | 画像補正方法及び画像補正装置 |
| US7058511B2 (en) * | 2003-11-24 | 2006-06-06 | The Boeing Company | Sub-visible cloud cover assessment: VNIR-SWIR |
| US8594375B1 (en) * | 2010-05-20 | 2013-11-26 | Digitalglobe, Inc. | Advanced cloud cover assessment |
| US9230308B2 (en) * | 2011-06-30 | 2016-01-05 | Weyerhaeuser Nr Company | Method and apparatus for removing artifacts from aerial images |
| US8509476B2 (en) * | 2011-09-13 | 2013-08-13 | The United States Of America, As Represented By The Secretary Of The Navy | Automated system and method for optical cloud shadow detection over water |
| JP5856866B2 (ja) | 2012-02-10 | 2016-02-10 | 株式会社日立製作所 | 太陽光発電量推定システム、装置及び方法 |
| US20140083413A1 (en) * | 2012-09-24 | 2014-03-27 | Brightsource Industries (Israel) Ltd. | Method and apparatus for mapping cloud shading on the ground in a large area |
| US9001311B2 (en) * | 2013-03-15 | 2015-04-07 | Digitalglobe, Inc. | Using parallax in remote sensing to determine cloud feature height |
| US9449244B2 (en) * | 2013-12-11 | 2016-09-20 | Her Majesty The Queen In Right Of Canada, As Represented By The Minister Of National Defense | Methods for in-scene atmospheric compensation by endmember matching |
| US20170031056A1 (en) * | 2014-04-10 | 2017-02-02 | Board Of Regents, The University Of Texas System | Solar Energy Forecasting |
| US9721181B2 (en) | 2015-12-07 | 2017-08-01 | The Climate Corporation | Cloud detection on remote sensing imagery |
-
2017
- 2017-09-08 US US16/644,560 patent/US11227367B2/en active Active
- 2017-09-08 JP JP2020513656A patent/JP6885509B2/ja active Active
- 2017-09-08 WO PCT/JP2017/032530 patent/WO2019049324A1/en not_active Ceased
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230078377A (ko) * | 2021-11-26 | 2023-06-02 | 한국항공우주연구원 | 위성 영상 편집 방법, 위성 영상 편집 장치 및 상기 방법을 실행시키기 위하여 기록매체에 저장된 컴퓨터 프로그램 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020532808A (ja) | 2020-11-12 |
| WO2019049324A1 (en) | 2019-03-14 |
| US20200265562A1 (en) | 2020-08-20 |
| US11227367B2 (en) | 2022-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6885509B2 (ja) | 画像処理装置、画像処理方法及び画像処理プログラム | |
| CN110100262B (zh) | 用于从图像移除云的图像处理设备、方法和存储介质 | |
| CN109214439B (zh) | 一种基于多特征融合的红外图像结冰河流检测方法 | |
| CN109146890B (zh) | 基于滤波器的高光谱图像的异常目标检测方法 | |
| US7953280B2 (en) | Anomalous change detection in imagery | |
| EP2846306B1 (en) | Image processing apparatus for removing haze contained in still image and method thereof | |
| Satya et al. | Stripe noise removal from remote sensing images | |
| CN120707450B (zh) | 一种复杂光场干扰环境下的精密金属件表面缺陷成像方法及系统 | |
| Kumar et al. | Comparison of efficient techniques of hyper-spectral image preprocessing for mineralogy and vegetation studies | |
| CN114820577A (zh) | 一种多源卫星遥感影像产品的辐射质量检测方法及系统 | |
| JP6958743B2 (ja) | 画像処理装置、画像処理方法及び画像処理プログラム | |
| Cui et al. | Multiscale Intensity Propagation to Remove Multiplicative Stripe Noise From Remote Sensing Images. | |
| US10650498B2 (en) | System, method, and non-transitory, computer-readable medium containing instructions for image processing | |
| CN114792322A (zh) | 一种检测山地国产高分辨率卫星影像云与云阴影的方法 | |
| CN111310771A (zh) | 遥感影像的道路图像提取方法、装置、设备及存储介质 | |
| Rahimzadegan et al. | Development of the iterative edge detection method applied on blurred satellite images: state of the art | |
| CN103824260A (zh) | 一种高分辨率遥感图像薄雾快速去除技术 | |
| Qi et al. | Fast thermal infrared image restoration method based on on-orbit invariant modulation transfer function | |
| CN118570615A (zh) | 一种基于高分辨率sar影像的覆雪条件下结构面识别方法 | |
| CN110753951B (zh) | 用于处理在大气中存在气溶胶和/或云的情况下获取的光学图像的方法 | |
| CN117522746A (zh) | 一种遥感图像阴影去除方法、设备及存储介质 | |
| Somdatta et al. | Pre-processing of hyperspectral data: a case study of Henry and Lothian Islands in Sunderban Region, West Bengal, India | |
| Shrawankar et al. | An algorithm for high-resolution satellite imagery pre-processing | |
| Zhou et al. | An Extended Cloud Shadow Detection Algorithm Supported by an A Priori Database | |
| CN117315391B (zh) | 一种物体分类模型训练方法、装置、设备及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200305 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200305 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210413 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210426 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6885509 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |