JP6889923B2 - 歩幅推定装置および歩幅推定プログラム - Google Patents
歩幅推定装置および歩幅推定プログラム Download PDFInfo
- Publication number
- JP6889923B2 JP6889923B2 JP2017179206A JP2017179206A JP6889923B2 JP 6889923 B2 JP6889923 B2 JP 6889923B2 JP 2017179206 A JP2017179206 A JP 2017179206A JP 2017179206 A JP2017179206 A JP 2017179206A JP 6889923 B2 JP6889923 B2 JP 6889923B2
- Authority
- JP
- Japan
- Prior art keywords
- subject
- stride
- leg
- angular velocity
- movement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- RRYRQMCYXOTGBZ-UHFFFAOYSA-N CC1(CCCCC2)C2C=CCC1 Chemical compound CC1(CCCCC2)C2C=CCC1 RRYRQMCYXOTGBZ-UHFFFAOYSA-N 0.000 description 1
Images














Landscapes
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Description
20代〜60代の54名(男性12名、女性42名)の被験者について、携帯端末をサポータにより大腿部に取り付け、各被験者の歩行データを取得した。そして、計算モデルを切り替える際の基準となる腰部の移動量の閾値Lthを12cmに設定して、本実施形態の歩幅推定処理と同様の処理を行い、各被験者の2歩分の歩幅を算出した。
54名分の歩行データについて、各被験者の腰部の移動量を算出した後、腰部の移動量により計算モデルを切り替えることなく、上記の第1計算モデル30に基づいて、脚部の加速度情報から脚部の移動量L4を算出した。そして、腰部の移動量と脚部の移動量とを合算して、各被験者の2歩分の歩幅L5を算出した。
54名分の歩行データについて、各被験者の腰部の移動量を算出することなく、上記の第2計算モデル40に基づいて、脚部の角速度情報から各被験者の2歩分の歩幅L6を算出した。
54名の被験者について、各被験者のズボンのポケットに収納した携帯端末により歩行データを取得した。そして、54名分の歩行データについて、上記の非特許文献1と同様の処理を行って、各被験者の2歩分の歩幅を算出した。具体的には、図11に示すような第3計算モデル70に基づいて、被験者の直立時の重力加速度が最大になる1軸(たとえば、Y軸)を決定し、1軸の重力加速度が最大値をとる第1時点t0と最小値をとる第2時点t1を算出した。そして、下記の数式(8)に示すとおり、残りの2軸(たとえば、X軸、Z軸)の軸周りの角速度の和gk(=gx+gz)を第1時点t0から第2時点t1まで積分して、重力方向に対する大腿部の最大傾斜角度θmaxを算出した。
54名の被験者について、マイクロソフト社製のモーションセンサであるKinectセンサを用いて2歩分の歩幅を直接的に計測した。そして、Kinectセンサにより直接的に計測された歩幅を基準(真値)として、実施例1,2および比較例1,2によりそれぞれ算出された歩幅の真値からの誤差(平均誤差および最大誤差)を算出して、歩幅の推定精度を評価した。評価結果を図12に示す。
本実施形態に係る歩幅推定処理の有効性を確認するために、実施例1により算出された各被験者の歩幅と腰部の移動量との相関性を調べた。被験者の歩幅と腰部の移動量との関係を図13に示す。また、参考として、Kinectセンサにより直接的に計測された歩幅と実施例1により算出された腰部の移動量との関係を図14に示す。なお、図13および図14の横軸は、被験者の2歩分の歩幅(ストライド)を示している。
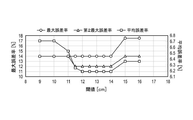
54人分の歩行データについて、計算モデルを切り替える際の基準となる閾値Lthを0.5cm単位で変更しつつ、本実施形態に係る歩幅推定処理と同様の処理を行い、被験者の2歩分の歩幅をそれぞれ算出した。そして、Kinectセンサにより計測された歩幅との最大誤差、その次に大きい誤差(第2最大誤差)、および平均誤差を算出して、閾値Lthを評価した。評価結果を図15に示す。
11 CPU(第1〜第4演算部、出力制御部)、
12 RAM、
13 ストレージ、
14 操作表示部、
14a 表示面、
15 加速度センサ、
16 ジャイロセンサ(腰部角速度センサ、脚部角速度センサ)、
17 通信部、
18 バス、
20 回旋モデル、
30,40,70 計算モデル、
50 矢状面、
60 横断面。
Claims (4)
- 被験者の脚部に取り付けられ、歩行中の前記被験者の前記脚部に作用する加速度を検出する加速度センサと、
前記被験者の前記脚部に取り付けられ、歩行中の前記被験者の腰部に作用する水平方向の角速度を検出する腰部角速度センサと、
前記加速度センサにより検出された加速度に基づいて、前記被験者の前記脚部の移動量を算出する第1演算部と、
前記腰部角速度センサにより検出された角速度に基づいて、前記被験者の前記腰部の移動量を算出する第2演算部と、
前記脚部の移動量と前記腰部の移動量とから、前記被験者の歩幅を算出する第3演算部と、
を有する歩幅推定装置。 - 前記被験者の前記脚部に取り付けられ、歩行中の前記被験者の前記脚部に作用する角速度を検出する脚部角速度センサと、
前記脚部角速度センサにより検出された角速度に基づいて、前記被験者の歩幅を算出する第4演算部と、
前記腰部の移動量が所定の閾値を超える場合、前記第3演算部により算出された歩幅を出力する一方で、前記腰部の移動量が前記閾値以下の場合、前記第4演算部により算出された歩幅を出力する出力制御部と、をさらに有する、請求項1に記載の歩幅推定装置。 - 被験者の脚部に取り付けられた加速度センサにより検出される、歩行中の前記被験者の前記脚部に作用する加速度に基づいて、前記被験者の前記脚部の移動量を算出する手順(a)と、
前記被験者の前記脚部に取り付けられた腰部角速度センサにより検出される、歩行中の前記被験者の腰部に作用する水平方向の角速度に基づいて、前記被験者の前記腰部の移動量を算出する手順(b)と、
前記脚部の移動量と前記腰部の移動量とから、前記被験者の歩幅を算出する手順(c)と、
をコンピュータに実行させる歩幅推定プログラム。 - 前記被験者の前記脚部に取り付けられた脚部角速度センサにより検出される、歩行中の前記被験者の前記脚部に作用する角速度に基づいて、前記被験者の歩幅を算出する手順(d)と、
前記腰部の移動量が所定の閾値を超える場合、前記手順(c)において算出された歩幅を出力する一方で、前記腰部の移動量が前記閾値以下の場合、前記手順(d)において算出された歩幅を出力する手順(e)と、をさらにコンピュータに実行させる、請求項3に記載の歩幅推定プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017179206A JP6889923B2 (ja) | 2017-09-19 | 2017-09-19 | 歩幅推定装置および歩幅推定プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017179206A JP6889923B2 (ja) | 2017-09-19 | 2017-09-19 | 歩幅推定装置および歩幅推定プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019051243A JP2019051243A (ja) | 2019-04-04 |
| JP6889923B2 true JP6889923B2 (ja) | 2021-06-18 |
Family
ID=66012899
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017179206A Active JP6889923B2 (ja) | 2017-09-19 | 2017-09-19 | 歩幅推定装置および歩幅推定プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6889923B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7504611B2 (ja) * | 2020-02-10 | 2024-06-24 | 株式会社今仙電機製作所 | 歩行支援装置、歩行支援装置の制御方法及びそのプログラム |
| CN113712536B (zh) * | 2020-05-26 | 2023-12-26 | 李昀儒 | 基于步态分析的不平衡预警方法及穿戴装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3984253B2 (ja) * | 2004-10-01 | 2007-10-03 | マイクロストーン株式会社 | 健康管理用装置 |
| JP4971808B2 (ja) * | 2007-01-17 | 2012-07-11 | パナソニック株式会社 | 歩行動作分析装置 |
| KR101759350B1 (ko) * | 2010-11-25 | 2017-07-18 | 삼성전자주식회사 | 사용자 단말의 변위 추정방법 및 장치 |
| JP5099800B1 (ja) * | 2012-05-31 | 2012-12-19 | マキクリエイション株式会社 | 姿勢改善ガードル |
| JP6183906B2 (ja) * | 2013-08-28 | 2017-08-23 | 日本電信電話株式会社 | 歩容推定装置とそのプログラム、転倒危険度算出装置とそのプログラム |
| JP6183716B2 (ja) * | 2014-09-19 | 2017-08-23 | カシオ計算機株式会社 | 運動支援装置及び運動支援方法、運動支援プログラム |
-
2017
- 2017-09-19 JP JP2017179206A patent/JP6889923B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019051243A (ja) | 2019-04-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6288706B2 (ja) | 上体運動計測システム及び上体運動計測方法 | |
| US10751561B2 (en) | Systems and methods for controlling a self-paced treadmill using predicted subject velocity | |
| JP6131706B2 (ja) | 歩行姿勢計およびプログラム | |
| CN105435436B (zh) | 运动支援装置、运动支援方法及计算机可读取的记录介质 | |
| CN110381910A (zh) | 步行支援系统、步行支援方法及步行支援程序 | |
| CN103323615B (zh) | 一种通过加速度传感器计算步行速度的移动终端及方法 | |
| JP2012513227A (ja) | 歩行モニタ | |
| JP6881451B2 (ja) | 歩行状態判定装置、歩行状態判定システム、歩行状態判定方法及びプログラム | |
| Liang et al. | Smartphone-based real-time indoor location tracking with 1-m precision | |
| CN106572816A (zh) | 步行解析系统和步行解析程序 | |
| JP2013117493A (ja) | 移動経路推定システム、移動経路推定装置及び移動経路推定方法 | |
| JP6889923B2 (ja) | 歩幅推定装置および歩幅推定プログラム | |
| KR101718392B1 (ko) | 신발에 부착된 관성 센서를 이용하여 보폭 정보를 계산하는 휴대 단말 및 그 방법 | |
| CN111671432A (zh) | 惯性传感器的安装姿势推测方法 | |
| Abbasi et al. | A motion capture algorithm based on inertia-Kinect sensors for lower body elements and step length estimation | |
| Chen et al. | Extracting spatio-temporal information from inertial body sensor networks for gait speed estimation | |
| JP6738249B2 (ja) | 歩行分析方法及び歩行分析装置 | |
| JP5915990B2 (ja) | つまずきリスク評価装置、つまずきリスク評価システム | |
| KR101592101B1 (ko) | 운동 능력 평가 시스템 및 그 방법 | |
| US20120144916A1 (en) | Single gyroscope-based approach to determining spatial gait parameters | |
| JP5928036B2 (ja) | タグ位置推定システム、タグ位置推定方法、及びタグ位置推定プログラム | |
| TW201918225A (zh) | 步態分析方法與系統 | |
| US20240260854A1 (en) | Physical-ability estimation system, physical-ability estimation method, and recording medium | |
| EP3999813B1 (en) | Apparatus and associated methods for step length estimation | |
| JP6259256B2 (ja) | 前進運動加速度算出方法及び装置並びにプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171012 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200827 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210428 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210512 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210517 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6889923 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |