以下、本発明を回転式の塵芥収集車に適用した実施形態について、図面を参照して説明する。なお、以下の説明においては便宜上、塵芥収集車の前後左右を単に前後左右と呼ぶこともある。
図1には、本発明の実施形態に係る人物認識装置を装備した塵芥収集車100を示し、その車台1上には塵芥収容箱2と塵芥投入箱3とが設けられていて、塵芥収容箱2の後方の開口部と塵芥投入箱3の前面の開口部とが連通されている。また、塵芥投入箱3は、その上部に設けられた左右方向の枢軸3aによって軸支されており、図示しないが、左右一対の傾動シリンダによって傾動されるようになっている。
また、前記塵芥投入箱3の背面における下寄りの部位には、塵芥を投入するための矩形状の塵芥投入口4(図6、7も参照)が開口され、昇降可能なテールゲート5によって開閉されるようになっている。この塵芥投入口4の左側方には、塵芥積込装置の作動などの操作のためのスイッチボックス6が設けられており、また、塵芥投入口4の上方には、詳しくは後述するが、塵芥投入口4の近傍を撮影するようにカメラ7が配設され、その下方には塵芥投入口4の近傍を照らすように作業灯8が配設されている。
図2に拡大して示すように塵芥投入箱3の内部には、投入された塵芥を塵芥収容箱2に積み込む塵芥積込装置が装備されている。本実施形態の塵芥積込装置は、回転板10(積込部材)の回転によって塵芥を掻き上げるとともに、押込板20によって塵芥収容箱2内へと押し込む、いわゆる回転式のものである。すなわち、まず、塵芥投入箱3内の下部においてその幅方向に延びるように回転軸11が架設され、これに回転板10の基端側が固定されている。
図示の例では前記回転軸11の端部に減速機構12を介して正逆回転可能な油圧モータ13が連結されている。よって、油圧モータ13の回転は減速機構12によりトルクアップされて回転軸11に伝達され、この回転軸11と一体に回転板10が回転されることで、その先端部は、断面略半円弧状に形成された塵芥投入箱3の底壁に沿って前後方向に移動するようになる。
一方、押込板20は、前記回転板10の上方において塵芥投入箱3の幅方向全体に亘って設けられ、その上部に設けられた左右方向の揺動軸21の周りに前後方向に揺動自在に支持されている。また、押込板20には、揺動軸21よりも上方に延びる延設部22が設けられ、この延設部22とその前方の支持ピン23との間に押込シリンダ24が架設されており、その伸縮作動によって押込板20を前後方向に揺動させるようになっている。
すなわち、図2に実線で示すように押込板20が塵芥収容箱2の側に最も揺動した位置(前進限界位置)にあるときは、この押込板20に干渉することなく回転板10が上方に回動するようになり、これに遅れて押込板20が塵芥投入口4側へ揺動する。そして、押込板20が塵芥投入口4側に最も揺動し、図2には仮想線で示す後退限界位置に達した後も、回転板10の回動は継続される。
こうして回転する回転板10は、塵芥を塵芥収容箱2側に掻き込んで、図2に実線で示すように前方の塵芥収容箱2側に延びる設定停止位置に一旦、停止する。そうすると今度は押込板20が塵芥収容箱2側に揺動して、回転板10上の塵芥を塵芥収容箱2に押し込んでゆく。そして、押込板20が再び前記の前進限界位置に達すれば、再び回転板10が上方へ回動するようになる。
このように互いに同期して回転板10の回転および押込板20の揺動が繰り返されることによって、塵芥投入箱3に投入された塵芥が連続的に塵芥収容箱2に積み込まれる(以下、塵芥積込作動と呼ぶ)。そのように回転板10および押込板20を作動させるための油圧回路および電子制御装置(制御系)の構成については以下に述べるが、そのために塵芥投入箱3の内部には、回転板10および押込板20の位置を検出するためのスイッチLS1〜LS4が設けられている。
すなわち、図2に表れているように、押込板20が前進限界位置または後退限界位置にあるときにそれぞれオンになるスイッチLS1,LS2と、回転板10が設定停止位置にあるときにオンになるスイッチLS3と、その設定停止位置から回転板10が正の向き(図1の時計回り)に所定角度回転したときにオンになり、さらに所定角度回転したときにオフになるスイッチLS4と、が設けられている。
なお、スイッチLS1,LS2は、押込板20の揺動軸21の端部に設けられた図示省略のドグを検出するようになっており、スイッチLS3〜LS4は、回転板10の回転軸11の端部に設けられた図示省略のドグを検出するようになっている。また、これらのスイッチLS1〜LS4としては例えばリミットスイッチ、光電スイッチ、近接スイッチなどを使用することができる。
また、スイッチLS4は、図2にハッチングで示すように、回転板10が塵芥投入口4の前縁部4aの真下から、その後方へ回転しつつ下降して塵芥投入口4の後縁部4bに最も近接するまでの角度範囲Zを検出するもので、回転板10が塵芥投入口4の近傍にて作動していることを検出するためのセンサである。その角度範囲Zにおいては回転板10が作業者の体の一部を巻き込む危険性があるので、以下では危険な角度範囲Zと呼ぶ。
さらに、図1、2に表れているように塵芥投入口4の近傍には、塵芥積込装置の作動を停止させるための緊急停止ボタン60,61や緊急停止プレート62などが配設されている。図1に表れているように塵芥投入口4の左側のスイッチボックス6に緊急停止ボタン60が配設され、また、図2に破線で示すように塵芥投入口4の右側に緊急停止ボタン61が配設されている。緊急停止プレート62は、塵芥投入口4の下方においてスイッチSW3をオンオフするように配設されている。
−塵芥積込装置の制御系−
次に、図3および図4を参照して、前記のように塵芥積込装置を作動させるための制御系について説明する。この制御系は、塵芥積込装置の油圧モータ13や押込シリンダ24などに供給する油圧を制御する油圧回路と、この油圧回路に設けられた電磁制御弁V1,V2に制御信号を出力する制御装置PLC(プログラマブル ロジック コントローラ)と、を備えている。
まず、図3を参照して油圧回路について説明すると、この油圧回路は、油圧ポンプPと、オイルリザーバTと、押込シリンダ24を制御するための電磁制御弁V1と、油圧モータ13を制御するための電磁制御弁V2と、を備えている。なお、油圧ポンプPには、図示しないが、エンジンの駆動力がPTO(パワー テイク オフ)を介して伝達されるようになっている。
一例として電磁制御弁V1,V2は、いずれも6ポート3位置の電磁式の方向切換弁からなる。電磁制御弁V1は、制御装置PLCによりソレノイドSOLaが励磁されると第1連通位置(図の上位置)に切り換わって、油圧ポンプPからの作動油を一対の押込シリンダ24のロッド側油室に供給する一方、制御装置PLCによりソレノイドSOLbが励磁されると第2連通位置(図の下位置)に切り換わって、作動油をヘッド側油室に供給する。
そうして電磁制御弁V1から作動油がヘッド側油室に供給されると、一対の押込シリンダ24が伸長作動して押込板20を前方に揺動させる。一方、作動油がロッド側油室に供給されると、一対の押込シリンダ24は収縮作動して、押込板20を後方に揺動させる。また、いずれのソレノイドSOLa,SOLbも励磁されていないときに、電磁制御弁V1は中立位置(図の中央位置)に復帰するようになる。
一方、電磁制御弁V2は、ソレノイドSOLcが励磁されると第1連通位置(図の下位置)に切り換わって、作動油を油圧モータ13の正転側油室に供給し、当該油圧モータ13を正転作動させるほか、押込シリンダ24も伸縮作動させることができる。一方、ソレノイドSOLdが励磁されると電磁制御弁V2は第2連通位置(図の上位置)に切り換わって、作動油を油圧モータ13の逆転側油室に供給し、当該油圧モータ13を逆転作動させる。
また、いずれのソレノイドSOLc,SOLdも励磁されていないときに、電磁制御弁V2は中立位置(図の中央位置)に復帰するようになる。電磁制御弁V1,V2の両方が中立位置にあるとき、作動油はオイルリザーバTへ還流するようになる。なお、図示の油圧回路において符号V3はチェック弁であり、また、符号V4は、油圧ポンプPの吐出圧の上限を設定するためのリリーフ弁である。
次に、図4を参照して制御装置PLCなどの信号の入出力状態について説明する。まず、制御装置PLCへの電力供給は図の左上(図中のモニタ93の下方)に示すバッテリBTによって行われる。このバッテリBTの正極から図の右側に延びてグランドラインK1に至る通電ラインK2には、塵芥収集車100のキースイッチSWK、PTOスイッチSWP、リレーコイルCR1などが介設されている。
また、前記キースイッチSWKおよびバッテリBTの中間において通電ラインK2から分岐するように、通電ラインK3の上流端が接続されており、その上流側(バッテリBTに近い側)には前記リレーコイルCR1の接点cr1が介設されている。この通電ラインK3には電源ランプLが介設されており、リレーコイルCR1がオンになって接点cr1が閉じられると、通電ラインK3に通電することによって電源ランプLが点灯する。
また、前記リレーコイルCR1の接点cr1および電源ランプLの中間において通電ラインK3から分岐するように、通電ラインK4の上流端が接続されており、これにより制御装置PLCの信号用電力供給部(図示せず)に電力が供給されるようになっている。つまり、前記のように接点cr1が閉じられると、通電ラインK3,K4を介して制御装置PLCに電力が供給される。
さらに、前記の通電ラインK4から分岐する通電ラインK5によって、塵芥積込装置の塵芥積込作動中には必ず制御装置PLCに通電されるようになっている。つまり、通電ラインK5は、いわゆる積込継続信号を入力するラインであり、ここには、図2を参照して上述した緊急停止ボタン60,61および緊急停止プレート62の操作に対応して開閉されるスイッチSW1〜SW3などが介設されている。
これらのスイッチSW1〜SW3によって通電(即ち積込継続信号の入力)が遮断されると、制御装置PLCの作動が停止される。これにより、電磁制御弁V1,V2のソレノイドSOLa〜SOLdを励磁させるための制御装置PLCからの制御信号の出力が全て途絶えて、電磁制御弁V1,V2が中立位置に復帰するようになり、塵芥積込装置の作動が停止されるようになっている。
また、通電ラインK4にはその途中から分岐する複数の分岐ラインが接続されており、これらの分岐ラインのそれぞれに、図2を参照して上述したスイッチLS1〜LS4が介設されている。そのうちのスイッチLS1〜LS3からの信号は制御装置PLCに入力されるようになっており、これらの信号に基づいて塵芥積込装置の回転板10および押込板20の位置、即ち作動状況が検出される。
なお、前記のスイッチLS1〜LS3の他にも制御装置PLCへの入力側には、図示はしないが、塵芥積込装置の始動および停止スイッチ、塵芥積込作動の単動または連続の選択スイッチ、塵芥積込作動および塵芥排出作動の選択スイッチ、回転板10や押込板20を単独で作動させるスイッチ、塵芥投入箱3を傾動させて開放するスイッチなども接続されている。
また、図2を参照して上述したように回転板10が危険な角度範囲Zにあることを検出するスイッチLS4からの信号は、制御装置PLCにではなくて、画像処理ユニット9へ入力されるようになっている。これを受けて画像処理ユニット9の中央処理部CPUは、詳しくは後述するが、画像処理部DSPから停止信号が発せられればリレースイッチSW4を開放させて、通電ラインK5による制御装置PLCへの通電を遮断する。
前記のように各種スイッチが入力側に接続されている一方、制御装置PLCの出力側には、図3を参照して上述した電磁制御弁V1,V2のソレノイドSOLa〜SOLdなどが接続されている。そして、制御装置PLCは、スイッチSW1〜SW3,LS1〜LS3などから入力する信号に基づいて、予め設定された手順に従い油圧モータ13や押込シリンダ24などを作動させるべく、対応するソレノイドSOLa〜SOLdに出力するようにプログラムされている。
すなわち、例えば塵芥積込装置が塵芥積込作動するときには、通電ラインK2上のキースイッチSWKおよびPTOスイッチSWPがいずれも閉じられて、リレーコイルCR1に通電される。これにより、リレーコイルCR1の接点cr1が閉じられるので、通電ラインK3〜K5によって通電されることにより、制御装置PLCが作動可能な状態になって適宜、ソレノイドSOLa〜SOLdに制御信号を出力するようになる。
この制御信号を受けてソレノイドSOLa〜SOLdが励磁され、電磁制御弁V1,V2の位置が適宜、切り換えられることで、油圧モータ13や押込シリンダ24などに作動油圧が供給される。これにより、油圧モータ13や押込シリンダ24などがそれぞれ作動し、図2を参照して上述したように、回転板10の回転および押込板20の揺動が互いに同期して繰り返されることになる。
詳しくは、まず図2に実線で示すように押込板20が前進限界位置にあって、スイッチLS1からオン信号が出力されるとともに、回転板10が設定停止位置にあって、スイッチLS3からもオン信号が出力されるときに、始動スイッチの信号を受けた制御装置PLCから制御信号が出力され、電磁制御弁V2が第1連通位置に切り換えられて、油圧モータ13が正転作動を開始する。これにより、回転板10は上方に回動し始める。
そして、所定の期間が経過すると制御装置PLCから電磁制御弁V1のソレノイドSOLaへ制御信号が出力されて、電磁制御弁V1が第1連通位置に切り換えられ、押込シリンダ24が収縮作動を開始する。これにより押込板20は後方の塵芥投入口4側へ揺動するようになり、この押込板20が後退限界位置に達すると、スイッチLS2からオン信号が出力される。
これを受けて制御装置PLCがソレノイドSOLaへの制御信号の出力を停止することで、電磁制御弁V1が中立位置に復帰し、押込板20の揺動が停止する。また、そうして押込板20が揺動している間も回転板10の回動は継続しており、塵芥を塵芥収容箱2側に掻き込んでゆくが、こうして回動する押込板20が設定停止位置に至り、スイッチLS3からオン信号が出力される。
これを受けて制御装置PLCが、電磁制御弁V2のソレノイドSOLcへの制御信号の出力を停止することで、電磁制御弁V2が中立位置に復帰し、油圧モータ13の回動が停止する。また、制御装置PLCは、電磁制御弁V1のソレノイドSOLbへ制御信号を出力し、電磁制御弁V1が第2連通位置に切り換えられて、押込シリンダ24が伸長作動を開始することで、押込板20が前方へ揺動し始める。
こうして前方の塵芥収容箱2側に揺動する押込板20が、回転板10上の塵芥を塵芥収容箱2に押し込んでゆき、前進限界位置に達すれば、スイッチLS1からオン信号が出力される。これを受けて制御装置PLCがソレノイドSOLbへの制御信号の出力を停止することで、電磁制御弁V1が中立位置に復帰し、押込シリンダ24の伸長作動、即ち、押込板20の前方への揺動が停止し、一連の動作が終了する。
なお、図4に表れているように、緊急停止用のスイッチSW1〜SW3が介設されている通電ラインK5には、以下に説明する画像処理ユニット9が介設されているとともに、この画像処理ユニット9をバイパスするバイパスラインK6によって制御装置PLCに通電するための切替スイッチSWSも介設されている。また、画像処理ユニット9の出力側(図4の右側)には作業灯8およびパイロットランプ91が接続されており、その点灯制御が行われる。
−人物認識装置および緊急停止装置−
ところで、前記のように塵芥積込装置が塵芥積込作動をしているときには、塵芥投入口4に塵芥を投入している作業者が不注意から回転板10などに巻き込まれるおそれがある。そこで、本実施形態の塵芥収集車100においては、塵芥投入口4の近傍を撮影するようにカメラ7を配設し、画像処理によって塵芥投入口4近傍の人物が危険なエリアにいると判定すれば、直ちに塵芥積込装置の作動を停止させるようにしている。
すなわち、前記の図1、2に表れている他、図5、6にも示すように、塵芥投入箱3の背面の上部、即ち塵芥投入口4の上方にはカメラ7が配設され、その撮像レンズ70が後方の斜め下に向けられている。このカメラ7は本来、塵芥収集車100の運転者が後方を監視するためのバックカメラとして用いられるものであり、図7に一例を示すように塵芥投入口4およびその後方の所定範囲を撮影するようになっている。
そうして塵芥投入口4の後方を撮影するためにカメラ7の撮像レンズ70の光軸Aは、鉛直下向きから後方に振り向けられて、塵芥投入口4の近傍の人物Hを上方から撮影するようになっている。また、そのカメラ7の下方に配設された作業灯8も後方斜め下向きとされ、撮像レンズ70の光軸Aと略平行に光を照射して、人物Hをカメラ7の撮影する方向にほぼ正面から照射するようになっている。
こうして正面から照明光を当てるようにすれば、人物Hの姿勢が多少、変化してもその見え方が大きく変化することはないので、夜間や地下スペースなどの暗い場所でも、撮影した画像中における人物Hの物体像の変化はあまり大きくならない。また、カメラ7の下方に作業灯8を配設しているので、雨風による作業灯8の汚れを抑制できる上に、そのオンオフを作業者などが視認しやすい。
そして、前記の図4に表れているようにカメラ7は、信号分配器92を介して監視用のモニタ93および画像処理ユニット9(画像処理装置であり、例えば図1に破線で示すように運転席周辺に配設されている)に接続されている。このモニタ93は、塵芥収集車100の運転者にカメラ7の画像を提供するものであり、それと同じ画像が画像処理ユニット9に送信されて、作業者などが危険なエリアにいるか否か判定される。
すなわち、前記の図5〜7には、塵芥投入口4の近傍に立った作業者(人物H)が両腕を前方に伸ばして、ごみ袋を積み込む様子が示されており、この人物Hが危険なエリアにいるか否かを画像処理ユニット9において判定するようになっている。そのために画像処理ユニット9には、図5に模式的に示すように、カメラ7からの画像データを入力して、以下に説明する公知の画像処理を行う画像処理部DSPが設けられている。
また、画像処理ユニット9には、所定のプログラムを実行して各種の制御を行う中央処理部CPU、この中央処理部CPUや前記画像処理部DSPにおいて使用されるデータを記憶するメモリM、中央処理部CPUの指令を受けて開閉されるリレースイッチSW4なども設けられている。そして、画像処理部DSPにおいて人物Hが危険なエリアにいると判定すれば、中央処理部CPUがリレースイッチSW4を開放させる。
ここで、図4を参照して上述したように塵芥積込装置の積込作動時には、キースイッチSWKおよびPTOスイッチSWPがいずれも閉じられており、通電ラインK3〜K5によって制御装置PLCに通電されている。そして、その通電ラインK5の途中に画像処理ユニット9が介設されているので、ここにおいて前記のようにリレースイッチSW4が開放されると、制御装置PLCへの通電が遮断されて、塵芥積込装置の作動が停止されることになる。
つまり、画像処理ユニット9の中央処理部CPUおよびリレースイッチSW4によって、塵芥積込装置の作動を停止させる緊急停止装置が構成されている。また、そうして緊急停止装置として機能する他に、中央処理部CPUは、画像処理ユニット9の作動中には作業灯8を点灯させる一方、故障などの非作動時には消灯させるようになっており、このような作業灯8のオンオフ制御を行う点灯としても機能する。
こうして画像処理ユニット9の非作動時には作業灯8を消灯させることで、ごみ袋を積み込む作業者(人物H)は、画像処理による緊急停止装置が作動していないことに容易に気付き、塵芥積込装置に巻き込まれないように一層の注意を払うようになる。なお、画像処理ユニット9には、中央処理部CPUの指令を受けてモニタ93に画像処理の結果などを表示させる画像出力部VOPやカメラ7の制御を行うカメラ制御部(図示せず)なども設けられている。
−画像処理のルーチン−
前記の画像処理部DSPは、公知の画像処理ロジックを高速で行う一般的な集積回路であり、例えば入力画像データの二値化処理と、この二値化された画像データにおいて互いに近接する各画素について領域化するラベリング処理と、ラベリングにより領域化された物体像の領域が人物像であることを識別する人物識別処理と、人物像と識別された物体像の位置が危険なエリアか否か判定する人物位置判定処理とを行う。
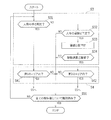
具体的に、図8のフローチャートを参照して画像処理のルーチンについて説明すると、まず、スタート後のステップS1において二値化処理が行われる。これは例えば、入力画像データについて各画素毎の輝度値が予め設定された閾値以上である場合に最大輝度値とし、閾値未満であれば最小輝度値とする処理である。生成される二値化画像データは、ノイズや光量変化の影響の多くが除去されたものとなる。
なお、こうして二値化処理を行う一方で、入力画像データはメモリMに一時保持しておき、これに含まれる色の情報を後述する人物Hの手の判定(ステップS3)に使用する。或いは、入力画像データについてカラー二値化処理も行い、各画素毎の色相値が予め設定された範囲にあるものを色情報として抽出する一方、それ以外は色相の情報を削除するようにしてもよい。
次にステップS2ではラベリング処理が行われる。これは、前記の二値化画像データにおいて互いに近接する各画素を領域化するものであり、例えば同じ輝度値に属するとともに、所定距離内で密接する複数の画素について1つの領域と見なす処理である。ラベリング処理は画像平面全体について行われ、これにより1つの領域とされたものが、それぞれ物体像として認識される。
そして、続くステップS3において、前記それぞれの物体像についての人物識別処理が行われる。本実施形態では、塵芥投入口4の上方に配設したカメラ7によって、下方の塵芥投入口4近傍を撮影するようにしているので、その画像には、図7に一例を示すように人物Hの頭部が大きく表示される。そこで、予め設定されている頭部の特徴データ、例えばその大きさや形状などを示すデータを参照し、この特徴データの条件を満たすような物体像を、人物Hの頭部と判定する。
また、図10を参照して後述するが、ステップS3においては人物Hの手首に装着されたリストバンドLBの特徴データ、即ちそこに表示された縞模様SP(識別表示)の色や形状、大きさなどを示すデータを参照し、この特徴データの条件を満たすような物体像を人物Hの手であると判定する。そうして、人物Hの手または頭部であると識別した物体像についてステップS4では、この物体像が予め設定されている危険なエリアに入っているか否か判定する。
本実施形態において危険なエリアは人物Hの手と頭部とで異なっており、図7に示すように、塵芥投入口4の前縁部4aおよび後縁部4bの中央の境界線B1よりも前方、即ち塵芥投入口4の奥側が、手に関しての危険なエリアである第1のエリアとされている。また、塵芥投入口4の全体に相当するエリア、即ち塵芥投入口4の後縁部4b(境界線B2)よりも前方が、頭部に関しての危険なエリアである第2のエリアとされている。
そして、前記のように人物Hの手であると識別した物体像(領域)の外形をなす画素の位置座標が、第1のエリアの境界線B1よりも前方にあるか否かを判定する。また、前記のように人物Hの頭部であると識別した物体像(領域)の外形をなす画素の位置座標が、第2のエリアの境界線B2よりも前方にあるか否かも判定する。こうして人物Hが危険なエリアにいるか否かの判定が行われる。
そのようにして人物Hの手および頭部の少なくとも一方が危険なエリア(第1、第2のエリア)に入っていると肯定判定すれば(YES)、ステップS5に進んで塵芥積込装置の作動を停止させるべく、中央処理部CPUへ停止信号を出力し、画像処理ルーチンを終了する(エンド)。一方、人物Hの手も頭部も危険なエリアに入っていないと否定判定すれば(NO)、停止信号は出力せずに画像処理ルーチンを終了する(エンド)。
そうして画像処理部DSPから停止信号が発せられると、これを受けた中央処理部CPUは、スイッチLS4からの信号がオンであれば、即ち、回転板10が危険な角度範囲Zにあれば、リレースイッチSW4を開放させる。すなわち、図示しないリレーコイルに通電してスイッチの接点を開くことにより、通電ラインK5による制御装置PLCへの通電を遮断する。
これにより制御装置PLCの作動が強制的に停止されるので、仮に制御装置PLCに何らかの異常があっても、電磁制御弁V1,V2の全てのソレノイドSOLa〜SOLdへの通電が停止されることになる。よって、第1連通位置または第2連通位置にある電磁制御弁V1,V2が全て中立位置に復帰するようになり、その結果、直ちに油圧モータ13および押込シリンダ24の作動が停止される。
前記図8のフローのステップS3を実行することによって、画像処理部DSPは、物体像の特徴データを人物の手または頭部の特徴データと比較して、物体像が人物の手または頭部を表すものか否か判定する人物識別部を構成し、さらに、ステップS4を実行することによって、人物の手または頭部を表す物体像が塵芥投入口近傍の所定のエリアに入っているか否か判定する人物位置判定部を構成する。
なお、図示は省略するが、画像処理ユニット9には公知の手法により汎用のパソコンなど、コンピュータ装置を接続して、リストバンドLBの色の情報を設定できるようになっている。すなわち、画像処理ユニット9には、ユーザが設定した色相値のデータを入力し、特徴データの色情報としてメモリMに格納する入力設定プログラムが備わっており、このルーチンを実行することによって中央処理部CPUが、特徴データの色情報をユーザが設定可能とする色情報設定部を構成する。
−人物の手などの識別−
次に、前記図8のフローのステップS3,S4において人物の手や頭部を識別し、これらが危険なエリアにあるか否か判定する手順について、図9のフローチャートを参照して詳細に説明する。上述したように本実施形態では、塵芥投入口4の上方に配設したカメラ7によって塵芥投入口4の近傍を見下ろすように撮影しており、前記の図7に表れているように画像中には人物Hの頭部が大きく表示される。
そこで、人物Hであることを認識するために、まず、その頭部を識別することが考えられるが、図5、6を参照して上述したように作業者(人物H)は、塵芥投入口4にごみ袋を投入する際に、両腕を前方斜め上方に伸ばしてごみ袋を積み込むことがある。よって、その手が塵芥積込装置に巻き込まれることを防止するために、人物Hの頭部よりもむしろその手を識別することが望ましい。
しかしながら人の手は、開いたり閉じたりすることによって大きく形状が変化する上に、どの向きから撮影するかによって画像中の物体像の形状が大きく変化することになり、さらに、手袋などを装着した場合は、これによって大きさも変化するようになる。このことから、人の手を画像処理によって識別することは極めて難しいと考えられている。
このような実状を考慮して本実施形態では、図10に一例を示すようなリストバンドLBを作業者の手首に装着させ、このリストバンドLBの周回するように表示した縞模様SP(識別表示)、特にその色を特徴データとして参照し、これにより手であることを識別するようにしている。こうしてリストバンドLBを周回する縞模様SPの色は、手の向きが変わっても同じように識別可能である。
具体的には、まず、図9のフローのスタート後のステップS31において、予め設定されているリストバンドLBの特徴データ、即ち、その縞模様SPの色、および大きさや形状などを示す特徴データを参照し、この特徴データの条件を画像中の物体像が満たすか否か判定する。なお、縞模様SPの色は、塵芥収集車100の車体色や地域のごみ袋の色と間違いなく識別できるように、予めユーザによって設定されて画像処理ユニット9のメモリMに格納されている。
そして、物体像の色が縞模様SPの色とマッチしていなければ、物体像は人物Hの手ではないと否定判定(NO)して後述するステップS32に進み、今度は物体像が人物Hの頭部か否か判定する。一方、縞模様SPの色がマッチしていれば、物体像が人物Hの手であると肯定判定(YES)して、ステップS41に進む。なお、このときに色の情報だけでなく、物体像の形状や大きさも判定に利用するようにしてもよい。
ステップS41の処理は、図8のフローのステップS4に対応しており、前記のように手であると判定した物体像が第1のエリアに入っているか否か判定するものである。即ち、図7を参照して上述したように、手であると識別した物体像が塵芥投入口4の中央付近の境界線B1よりも前方にあれば、第1のエリアに入っていると肯定判定する(ステップS41でYES)。
この場合は、図8のフローのステップS4でYESと判定して、ステップS5に進むことになり、上述したように塵芥積込装置の作動を停止させるべく、中央処理部CPUへ停止信号を出力する。一方、前記ステップS41で物体像が第1のエリアに入っていないと否定判定すれば(NO)、後述するステップS51に進む。つまり、物体像が手であると識別しても、これが第1のエリアに入っていなければ、塵芥積込装置の作動を停止させることはない。
また、前記のステップS31でリストバンドLBの縞模様SPの色がマッチしておらず、物体像は手でないと否定判定して進んだステップS32においては、今度は物体像が人物Hの頭部か否か判定する。これは、予め設定されている頭部の特徴データ、即ち例えば頭部の大きさや形状、頭髪の状態、さらには頭部や顔への装着物の大きさや形状などを示すデータを参照し、この特徴データの条件を満たすような物体像を、仮に人物Hの頭部と判定する(ステップS33)。
こうして頭部と仮判定した物体像について、それ以外の物体像と識別する処理を行う。すなわち、本実施形態では、カメラ7から時系列に入力される複数の画像データの差分処理(各画素毎の輝度値の差を求める処理)によって、物体像の位置の変化を検出しておく。そして、この位置の変化、即ち物体像の移動距離を、それに要した時間(画像データを取得する時間間隔)で除算して、物体像の移動速度を算出する。
こうして算出した移動速度が予め設定した閾値以下であるか否か、ステップS34において判定する。この閾値は、塵芥投入口4に塵芥を投入する作業者の頭部の移動速度と、投入される塵芥の移動速度とを区別できるように、予め実験などによって設定されている。よって、算出した移動速度が閾値よりも高ければ、動作が速すぎるので人物Hの頭部ではないと識別し、否定判定して(NO)後述のステップS51へ進む。
一方、前記ステップS34において移動速度が閾値以下であると肯定判定すれば(YES)、物体像は人物Hの頭部であると判定(本判定)してステップS42に進む。ステップS42の処理は、図8のフローのステップS4に対応しており、前記のように頭部であると判定した物体像が、図7を参照して上述した第2のエリアに入っているか否か判定するものである。
そして、頭部であると識別した物体像が塵芥投入口4の後縁部4b(境界線B2)よりも前方にあれば、第2のエリアに入っていると肯定判定する(ステップS42でYES)。この場合は、図8のフローのステップS4でYESと判定して、ステップS5に進むことになり、上述したように塵芥積込装置の作動を停止させるべく、中央処理部CPUへ停止信号を出力する。
一方、前記ステップS42で物体像が第2のエリアに入っていないと否定判定すれば(NO)ステップS51に進んで、画像中の全ての物体像について前記のような手や頭部であることの識別が済んだか否か判定し、否定判定(NO)であれば前記ステップS31に戻って、前述した手順を繰り返す。一方、全ての物体像についての識別が済んでいればステップS51で肯定判定(YES)し、ルーチンを終了する。
以上、説明したように本実施形態に係る塵芥収集車の人物認識装置は、まず、車体後部の塵芥投入箱3における塵芥投入口4の上方にカメラ7を配設し、下方の塵芥投入口4の近傍を撮影する。そして、そのカメラ7からの画像データを画像処理ユニット9に入力し、画像処理によって危険なエリアに人物Hが居ると判定すれば、塵芥積込装置の作動を停止させるようにしている。
そうしてカメラ7による画像データに基づいて、塵芥投入口4の近傍の人物Hを認識する際に、本実施形態では、そのカメラ7の下方に設けた作業灯8を点灯させ、人物H(例えば塵芥の積み込みをする作業者)に向かって光を照射するようにしている。こうしてカメラ7の下方に配設することで、雨風による作業灯8の汚れを抑制し、安定的に光を照射することができる。
また、本実施形態では作業灯8を、カメラ7の撮像レンズ70の光軸Aと略平行に人物Hに向かって光を照射するように設けており、これにより人物Hを、撮影する方向にほぼ正面から照らすことになる。よって、その姿勢が多少、変化しても見え方が大きく変化することはなく、撮影した画像中における物体像の変化はあまり大きはならないので、人物Hの認識の失敗や誤認が抑制される。
さらに、そうして撮影された画像中の物体像の特徴データが、人物Hの手の特徴データと比較される。この特徴データにはリストバンドLBの色の情報が含まれているので、人物Hの手が開いたり閉じたりして、その形状が大きく変化しても、また、手袋などの装着によって大きさが変化しても、そのことによらず手であることを識別できる。こうして手と判定された物体像が塵芥投入口4の奥側の第1のエリアに入っていれば、塵芥積込装置の作動を停止させることによって、安全性の確保が図られる。
また、本実施形態では、人物Hの手だけでなく、その頭部についても識別するようにしており、これが塵芥投入口4全体に相当する第2のエリアに入っていれば、塵芥積込装置の作動を停止させることによって、安全性の確保が図られる。
さらにまた、そのように画像処理によって塵芥投入口4の近傍の人物Hが認識されるときには、作業灯8が点灯される一方で、画像処理ユニット9の故障などの非作動時には作業灯8が消灯される。このため作業者(人物H)は、画像処理による緊急停止装置が作動しないことに容易に気付いて一層の注意を払うようになるので、事故を抑制する上で好ましい。特に本実施形態では作業灯8がカメラ7の下方に配設されているので、そのオンオフも視認しやすい。
−その他の実施形態−
以上、本発明の好適な実施形態について説明したが、これは1つの具体例を示したに過ぎず、特に本発明を限定するものではないから、具体的な構成などは適宜、設計変更可能である。例えば前記の実施形態では、画像処理ユニット9を制御装置PLCへの通電ラインK4に介設して、リレースイッチSW4の開放により制御装置PLCへの通電を遮断するようにしているが、これには限定されない。
すなわち、例えば画像処理ユニット9において人物Hが危険なエリアに居ると判定したときに、制御装置PLCに停止信号を出力し、これを受けた制御装置PLCによって電磁制御弁V1,V2のソレノイドSOLa〜SOLdへの制御信号の出力を停止させるようにしてもよく、その他、塵芥積込装置の作動を停止させることができる構成であれば採用可能である。
また、前記の実施形態では、作業者の手首に装着させたリストバンドLBの縞模様SPの色を特徴データとして、画像処理によって手であることを識別するとともに、作業者の頭部についても識別するようにしているが、これにも限定されない。例えば、作業者の頭部については識別しないようにしてもよいし、手以外に足にもリストバンドLBを装着させて、その縞模様SPの色などにより足であることを識別するようにしてもよい。
或いは、作業者が手に装着した手袋に前記の縞模様SPのような識別表示を設けて、これを識別するようにしてもよいし、手袋そのものの色に基づいて、これを識別するようにしてもよい。同様に、作業者が足に装着した靴に識別表示を設けて、これを識別するようにしてもよいし、靴そのものの色に基づいて、これを識別するようにしてもよい。
さらに、それら手や足への装着物(リストバンドLB、手袋、靴など)の特徴に基づいて作業者の手や足を識別する必要もなく、作業者の顔や頭部をその特徴データに基づいて識別するだけでもよい。
また、前記の実施形態では、作業灯8をカメラ7の下方に配設し、その撮像レンズ70の光軸Aに沿うように光を照射させるようにしているが、こうする必要もなく、作業灯8はカメラ7の上方や左右に配設して、これにより撮影する方向に光を照射させるようにしてもよい。
さらにまた、前記実施形態では、いわゆる回転式の塵芥積込装置を装備した塵芥収集車100に本発明を適用した場合について説明しており、塵芥積込装置の主要部は回転板10および押込板20により構成されているが、これにも限定されず、塵芥積込装置の主要部は昇降板および押込板によって構成されていてもよく、その構造を特に限定するものではない。