JP6904992B2 - 自然なピッチとロール - Google Patents
自然なピッチとロール Download PDFInfo
- Publication number
- JP6904992B2 JP6904992B2 JP2019024085A JP2019024085A JP6904992B2 JP 6904992 B2 JP6904992 B2 JP 6904992B2 JP 2019024085 A JP2019024085 A JP 2019024085A JP 2019024085 A JP2019024085 A JP 2019024085A JP 6904992 B2 JP6904992 B2 JP 6904992B2
- Authority
- JP
- Japan
- Prior art keywords
- robot
- posture
- processing system
- joint
- robotic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1694—Program controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D57/00—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track
- B62D57/02—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members
- B62D57/032—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members with alternately or sequentially lifted supporting base and legs; with alternately or sequentially lifted feet or skid
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39082—Collision, real time collision avoidance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39215—Adaptive control with stabilizing compensation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39325—External force control, additional loop comparing forces corrects position
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/01—Mobile robot
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
- Y10S901/09—Closed loop, sensor feedback controls arm movement
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/46—Sensing device
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Manipulator (AREA)
- Rehabilitation Tools (AREA)
Description
[0001] 本出願は、2014年8月25日に出願された米国仮特許出願第62/041,281号、2014年12月30日出願された米国特許出願第14/586,519号、及び2015年3月16日に出願された米国特許出願第14/659,012号の優先権を主張し、その内容はその全体が参照により本明細書に組み込まれる。
[0019] 例示的な実施形態は、少なくとも1つのロボット肢、センサ、及び処理システムを有するロボット装置を含む。ロボット肢は、関節によって接続されたいくつもの部材を含む多関節ロボット付属物であり得る。ロボット肢は、部材を接続する関節によって制限される動きの範囲を通じてロボット肢の運動を促進する肢の部材に結合されたいくつものアクチュエータ(例えば2〜5個のアクチュエータ)も含み得る。センサは、関節の角度、アクチュエータ内の圧力、及び/又は所定時点でのロボット肢の位置、速度、及び加速度などのロボット装置の特性を測定するように構成され得る。センサは、ロボット装置本体(本明細書ではロボットの「基部」とも呼ばれ得る)の姿勢(すなわち本体の姿勢の測定値)を測定するようにも構成され得る。他の例示的な特性は、ロボット装置の様々な構成要素の質量、ロボット装置又はロボット装置の様々な構成要素の質量中心の場所、その他の特性では、ロボット装置又はロボット装置の構成要素の慣性モーメントを含む。ロボット装置の処理システムは、角度センサ情報から直接的、又は関節角を計算し得る他のセンサ情報から間接的のいずれかによってロボット肢の関節の角度を判定し得る。処理システムは、次にはロボット装置基部の感知された姿勢及び関節角に基づきロボット装置の姿勢を推定し得る。
[0030] ここで図面を参照すると、図1は、例示的な実施形態によるロボット装置の例示的な構成を示す。ロボットシステム100は、本明細書に記載された動作を実行するように構成された例示的なロボット装置を表す。加えて、ロボット装置100は、自律的に、半自律的に、及び/又はユーザによって提供される指示を用いて動作するように構成され、かつ、人間型ロボット、又はその他の例の中でも四足ロボットなどの様々な形で存在し得る。さらに、ロボット装置100は、ロボット装置、可動性ロボット、又はその他の呼称の中でもロボットとも呼ばれ得る。
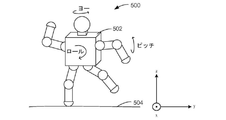
[0069] 図5A及び図5Cは、例示的な二足ロボットの構えを示す。図5A及び図5Cに示す二足ロボットは、図4に示したロボット装置400、図3に示したロボット装置300、又は図2に示したロボット装置200と同じ又は同様であり得る。図5B及び図5Dは、それぞれ、図5A及び図5Cの二足ロボットの簡略描写を示す。図5B及び図5Dに示した簡略描写は、それぞれ、図5A及び図5Cからの二足ロボットの集合的姿勢の剛性本体推定値である。図5A及び5Cに示した二足ロボット、及び図5B及び図5Dに示した二足ロボットの簡略描写は、説明の目的のために示されており、必ずしも縮尺通りに描かれていなくてよい。同様に、図5B及び5Dに示した特定の角度及び位置は、一定の縮尺で描かれておらず、必ずしも二足ロボットの集合的姿勢の正確な描写を表すものではない。
[00101] 図6は、例示的な実施形態による流れ図600である。流れ図における動作は、例えば、図1のロボット装置100、図2のロボット装置200、図3のロボット装置300、図4のロボット装置400、又はロボット装置100、ロボット装置200、ロボット装置300、及び/又はロボット装置400からの構成要素の任意の組み合わせによって実行され得る。図6は、1つ以上の動作、又はブロック602、604、606、608、及び610の1つ以上によって示されるような手順を含み得る。ブロックは順番に図示されているが、これらのブロックは、いくつかの例では、本明細書に記載されたものと並行して、及び/又は異なる順序で実行され得る。また、様々なブロックがより少数のブロックに結合され、追加のブロックに分割され、及び/又は所望の実施形態に基づいて除去され得る。
[00115] 図7は、本明細書に記載された少なくともいくつかの実施形態により構成された例示的なコンピュータ可読媒体を示す。例示的な実施形態では、例示的なシステムは、1つ以上のプロセッサ、1つ以上の形のメモリ、1つ以上の入力装置/インターフェース、1つ以上の出力装置/インターフェース、及び、1つ以上のプロセッサによって実行されると、上述した様々な機能の作業、能力等をロボット装置にさせる機械可読命令を含むことができる。
[00120] 本明細書に記載された構成は、例示のみの目的のためのものであることを理解されたい。したがって、当業者であれば、他の構成及び他の要素(例えば、機械、インターフェース、機能、順序、及び機能のグループなど)を代わりに使用することができ、いくつかの要素は、所望の結果に従いすべて省略し得る。さらに、記載されている要素の多くは、別個の又は分散された構成要素として、又は他の構成要素と組み合わせて、任意の適切な組み合わせ及び位置で実施し得る機能実体であり、又は独立した構造物として記載される他の構造的要素を組み合わせることができる。
Claims (10)
- 処理システムにおいて、ロボットに接続された複数のセンサから、前記ロボットの本体に接続された複数の関節肢のそれぞれの関節角を示す複数の測定値を受信すること、
前記処理システムにおいて、前記ロボットの前記本体の姿勢を示す本体の姿勢の測定値を受信すること、
前記処理システムによって、前記複数の測定値、前記本体の姿勢の測定値、及び前記ロボットの前記複数の関節肢に関連したそれぞれの特性に基づいて、前記ロボットの将来の姿勢を予測することであって、前記ロボットの前記姿勢は、前記ロボットの前記本体及び前記接続された複数の関節肢の基準フレームに対する姿勢を示すこと、
前記処理システムによって、前記基準フレームに対する前記予測された姿勢の特定の角度が、前記予測された姿勢が不安定な姿勢である又は前記不安定な姿勢になると判定することであって、前記不安定な姿勢は、経時的に増大された角速度をもたらし、前記特定の角度は、ヨー角、ピッチ角、及びロール角のうちの1つであること、及び
前記予測された姿勢が不安定な姿勢である又は前記不安定な姿勢になると判定することに応じて、前記処理システムによって、前記ロボットが前記不安定な姿勢より安定な別の姿勢をとるように、前記関節肢の少なくとも1つに、特定の位置に移動し特定の姿勢になる命令を提供することであって、前記別の姿勢は、前記特定の角度の減少された値に関連すること、を含む方法。 - 前記関節肢の前記少なくとも1つに命令を提供することは、前記ロボットが前記予測された姿勢をとる前に前記ロボットが前記別の姿勢をとるように、前記関節肢の前記少なくとも1つに命令を提供することを含む、請求項1の方法。
- 前記予測された姿勢が不安定な姿勢である又は前記不安定な姿勢になると判定することは、前記予測された姿勢の前記特定の角度が加速していると判定することを含む、請求項1の方法。
- 前記ロボットの前記将来の姿勢を予測することは、前記関節肢の前記少なくとも1つの重量配分に基づき、前記それぞれの関節角と前記本体の姿勢の測定値との間の関係を判定することを含み、前記関係は、前記それぞれの関節角が前記予測された姿勢に影響を及ぼす程度を表す、請求項1の方法。
- 前記それぞれの関節角と前記本体の姿勢の測定値との間の前記関係は、前記関節肢の前記少なくとも1つを動かすことから生じ前記本体にかけられるトルクを示す、請求項4の方法。
- 前記関節肢の前記少なくとも1つに前記命令を提供することは、
前記関節肢の前記少なくとも1つが前記別の姿勢をとるように地面に対して及ぼす力の程度を推定すること、及び
前記関節肢の前記少なくとも1つを前記地面に配置し、前記推定された力の程度を及ぼす命令を提供することを含む、請求項1の方法。 - 前記関節肢の前記少なくとも1つに命令を提供することは、
前記別の姿勢をとるように前記関節肢の前記少なくとも1つを移動させる位置を推定すること、及び
前記関節肢の前記少なくとも1つを前記推定された位置に移動させる命令を提供することを含む、請求項1の方法。 - 前記ロボットは2脚を含み、前記予測された姿勢は、前記ロボットが地面より上の中空にあり、かつ前記2脚が前記地面に接触していないときにおける前記ロボットを表し、前記方法は、
前記処理システムによって、前記ロボットが前記別の姿勢をとるように前記2脚のうちの1つを調節する角度を、前記2脚のうちの少なくとも1つが前記地面に降り着くとき推定すること、及び
前記処理システムによって、前記ロボットが前記別の姿勢をとるように、前記推定された角度によって前記2脚のうちの前記1つを調節する命令を提供することをさらに含む、請求項1の方法。 - 前記処理システムによって、前記ロボットがたどる所望の軌道を推定すること、及び
前記処理システムによって、前記ロボットが前記所望の軌道をたどるように前記予測された姿勢に対する修正を推定することをさらに含み、前記別の姿勢は前記推定された修正を含む、請求項1の方法。 - 前記提供される命令は第1の命令であり、前記方法は、
前記処理システムによって、前記予測された姿勢に基づく前記ロボットの角速度を推定すること、
前記処理システムにおいて、前記ロボットに加えられる外力を示す第2の複数の測定値を受信すること、
前記第2の複数の測定値及び前記ロボットの前記推定された角速度に基づき、前記処理システムによって、前記ロボットに加えられる前記外力によって引き起こされる前記推定された角速度の構成要素を推定すること、及び
前記処理システムによって、前記ロボットに加えられる前記外力によって引き起こされる前記推定された角速度の前記推定された構成要素に基づき、前記関節肢の前記少なくとも1つに第2の命令を提供することをさらに含む、請求項1の方法。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462041281P | 2014-08-25 | 2014-08-25 | |
| US62/041,281 | 2014-08-25 | ||
| US14/586,519 | 2014-12-30 | ||
| US14/586,519 US9517561B2 (en) | 2014-08-25 | 2014-12-30 | Natural pitch and roll |
| US14/659,012 US9662792B2 (en) | 2014-08-25 | 2015-03-16 | Natural pitch and roll |
| US14/659,012 | 2015-03-16 | ||
| JP2016572822A JP6483730B2 (ja) | 2014-08-25 | 2015-08-14 | 自然なピッチとロールを得る方法、ロボットおよびコンピュータ可読媒体 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016572822A Division JP6483730B2 (ja) | 2014-08-25 | 2015-08-14 | 自然なピッチとロールを得る方法、ロボットおよびコンピュータ可読媒体 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020204655A Division JP2021041532A (ja) | 2014-08-25 | 2020-12-10 | 自然なピッチとロール |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019089200A JP2019089200A (ja) | 2019-06-13 |
| JP2019089200A5 JP2019089200A5 (ja) | 2020-09-03 |
| JP6904992B2 true JP6904992B2 (ja) | 2021-07-21 |
Family
ID=55347481
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016572822A Expired - Fee Related JP6483730B2 (ja) | 2014-08-25 | 2015-08-14 | 自然なピッチとロールを得る方法、ロボットおよびコンピュータ可読媒体 |
| JP2019024085A Expired - Fee Related JP6904992B2 (ja) | 2014-08-25 | 2019-02-14 | 自然なピッチとロール |
| JP2020204655A Pending JP2021041532A (ja) | 2014-08-25 | 2020-12-10 | 自然なピッチとロール |
| JP2021126593A Pending JP2021181156A (ja) | 2014-08-25 | 2021-08-02 | 自然なピッチとロール |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016572822A Expired - Fee Related JP6483730B2 (ja) | 2014-08-25 | 2015-08-14 | 自然なピッチとロールを得る方法、ロボットおよびコンピュータ可読媒体 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020204655A Pending JP2021041532A (ja) | 2014-08-25 | 2020-12-10 | 自然なピッチとロール |
| JP2021126593A Pending JP2021181156A (ja) | 2014-08-25 | 2021-08-02 | 自然なピッチとロール |
Country Status (5)
| Country | Link |
|---|---|
| US (6) | US9517561B2 (ja) |
| EP (2) | EP3186041B1 (ja) |
| JP (4) | JP6483730B2 (ja) |
| CN (2) | CN111482960B (ja) |
| WO (1) | WO2016032773A2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230008096A1 (en) * | 2014-08-25 | 2023-01-12 | Boston Dynamics, Inc. | Natural pitch and roll |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150168953A1 (en) * | 2013-12-13 | 2015-06-18 | Itrack Llc | Autonomous self-leveling vehicle |
| US11093590B2 (en) * | 2015-08-31 | 2021-08-17 | Avaya Inc. | Selection of robot operation mode from determined compliance with a security criteria |
| US10493617B1 (en) * | 2016-10-21 | 2019-12-03 | X Development Llc | Robot control |
| US10351189B2 (en) * | 2016-12-13 | 2019-07-16 | Boston Dynamics, Inc. | Whole body manipulation on a legged robot using dynamic balance |
| US10766140B2 (en) * | 2017-04-13 | 2020-09-08 | Battelle Memorial Institute | Teach mode collision avoidance system and method for industrial robotic manipulators |
| JPWO2019035362A1 (ja) * | 2017-08-18 | 2019-11-07 | 三菱電機株式会社 | ロボット制御装置およびこれを用いたロボットシステム |
| WO2019123769A1 (ja) * | 2017-12-19 | 2019-06-27 | ソニー株式会社 | 肢ユニット、および、ロボット |
| US10800049B2 (en) * | 2018-02-22 | 2020-10-13 | Boston Dynamics, Inc. | Maneuvering mobile robots |
| US10802508B2 (en) * | 2018-02-22 | 2020-10-13 | Boston Dynamics, Inc. | Mobile robot |
| CN108638095A (zh) * | 2018-04-02 | 2018-10-12 | 深圳小趴智能科技有限公司 | 一种机器人运动控制装置及其操作方法 |
| WO2020107279A1 (zh) * | 2018-11-28 | 2020-06-04 | 深圳市优必选科技有限公司 | 双足机器人及其移动方法、装置和存储介质 |
| CN111377004B (zh) * | 2018-12-28 | 2021-11-16 | 深圳市优必选科技有限公司 | 一种双足机器人步态控制方法以及双足机器人 |
| US11241982B2 (en) * | 2019-06-28 | 2022-02-08 | Honda Motor Co., Ltd. | Walking infant seat |
| CN110524561B (zh) * | 2019-09-27 | 2024-03-26 | 长沙紫宸科技开发有限公司 | 一种多功能仿人多足机器人 |
| GB2588629B (en) * | 2019-10-29 | 2024-01-03 | Cmr Surgical Ltd | Robotic joint control |
| CN111086001B (zh) * | 2019-12-25 | 2021-09-14 | 广东省智能制造研究所 | 一种足式机器人多模态感知的状态估计方法及系统 |
| CN111216126B (zh) * | 2019-12-27 | 2021-08-31 | 广东省智能制造研究所 | 基于多模态感知的足式机器人运动行为识别方法及系统 |
| CN114131604B (zh) * | 2020-08-26 | 2023-11-03 | 北京市商汤科技开发有限公司 | 机器人的状态确定方法及装置、机器人及存储介质 |
| KR20230058652A (ko) * | 2020-09-01 | 2023-05-03 | 세바 테크놀러지, 인크. | 광학 흐름, 휠 인코더 및 관성 측정 유닛을 구비한 평면 로봇 추측 항법 |
| CN112256047B (zh) * | 2020-09-30 | 2023-04-11 | 江苏集萃智能制造技术研究所有限公司 | 一种基于四元数的四足姿态控制策略 |
| US12005584B2 (en) * | 2020-12-22 | 2024-06-11 | Ubtech Robotics Corp Ltd | Pose control method, robot and computer-readable storage medium |
| CN116395054A (zh) * | 2021-02-04 | 2023-07-07 | 深圳逐际动力科技有限公司 | 可变形态的腿部结构及机器人 |
| JP7156445B1 (ja) | 2021-05-18 | 2022-10-19 | 三菱電機株式会社 | 携帯端末、歩行ロボット、プログラム、および位置演算支援方法 |
| CN113997282B (zh) * | 2021-10-13 | 2022-11-25 | 杭州景业智能科技股份有限公司 | 机械臂控制方法、装置、电子装置和存储介质 |
| CA3181763A1 (en) * | 2021-11-12 | 2023-05-12 | Sanctuary Cognitive Systems Corporation | Robots and methods for protecting fragile components thereof |
| CN114147703B (zh) * | 2021-11-16 | 2023-11-17 | 深圳市优必选科技股份有限公司 | 机器人避障方法、装置、计算机可读存储介质及机器人 |
| CN114911164B (zh) * | 2022-05-07 | 2023-05-02 | 北京理工大学 | 一种仿鼠四足机器人跳跃动作的开环控制方法及系统 |
| US20240181637A1 (en) * | 2022-07-21 | 2024-06-06 | Carla R. Gillett | Autonomous humanoid robot |
| CN117532597A (zh) * | 2022-08-02 | 2024-02-09 | 北京小米机器人技术有限公司 | 机器人的控制方法、装置、电子设备、存储介质及机器人 |
| US12290940B1 (en) * | 2022-11-18 | 2025-05-06 | Agility Robotics, Inc. | Torso protrusion for robotic manipulation of objects and related technology |
| US20240189989A1 (en) * | 2022-12-13 | 2024-06-13 | Boston Dynamics, Inc. | Object climbing by legged robots using training objects |
| EP4691698A1 (en) | 2023-03-30 | 2026-02-11 | Sony Group Corporation | Information processing device, operation control method, and moving body |
| US12539618B1 (en) | 2023-04-17 | 2026-02-03 | Figure Ai Inc. | Head and neck assembly of a humanoid robot |
| US12365094B2 (en) | 2023-04-17 | 2025-07-22 | Figure Ai Inc. | Head and neck assembly for a humanoid robot |
| US12403611B2 (en) | 2023-04-17 | 2025-09-02 | Figure Ai Inc. | Head and neck assembly for a humanoid robot |
| USD1118726S1 (en) | 2023-04-17 | 2026-03-17 | Figure Ai Inc. | Humanoid robot |
| IT202300022377A1 (it) * | 2023-10-25 | 2025-04-25 | Marco Ceccarelli | Gamba robotica per movimento di salto |
| US12420434B1 (en) | 2024-01-04 | 2025-09-23 | Figure Ai Inc. | Kinematics of a mechanical end effector |
| US12605824B2 (en) | 2024-02-26 | 2026-04-21 | Figure Ai Inc. | Humanoid robot |
| US12611766B2 (en) | 2024-09-13 | 2026-04-28 | Figure Ai Inc. | Humanoid robot with advanced kinematics |
Family Cites Families (137)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB8906541D0 (en) | 1989-03-21 | 1989-05-04 | Portsmouth Tech Consult | Robot devices |
| JP2819353B2 (ja) * | 1990-09-28 | 1998-10-30 | 本田技研工業株式会社 | 脚式移動ロボットの歩行制御装置 |
| JP2997037B2 (ja) * | 1990-11-30 | 2000-01-11 | 本田技研工業株式会社 | 脚式移動ロボットの歩行制御装置 |
| JPH06170757A (ja) * | 1992-04-28 | 1994-06-21 | Honda Motor Co Ltd | リンク式移動ロボットの制御装置 |
| DE69725764T2 (de) * | 1996-07-25 | 2004-08-05 | Honda Giken Kogyo K.K. | Vorrichtung zur nachbildung des ganges für einen zweibeinigen robotor |
| US5929585A (en) * | 1996-11-19 | 1999-07-27 | Sony Corporation | Robot system and its control method |
| JP3956414B2 (ja) * | 1996-11-19 | 2007-08-08 | ソニー株式会社 | ロボット装置及びロボット装置の制御方法 |
| EP0965416B1 (en) | 1996-12-19 | 2005-12-07 | Honda Giken Kogyo Kabushiki Kaisha | Attitude controller of legged moving robot |
| JP3655056B2 (ja) * | 1997-08-04 | 2005-06-02 | 本田技研工業株式会社 | 脚式移動ロボットの制御装置 |
| JP2000236783A (ja) * | 1999-02-18 | 2000-09-05 | Mamiya Op Co Ltd | 釣 竿 |
| US6594552B1 (en) | 1999-04-07 | 2003-07-15 | Intuitive Surgical, Inc. | Grip strength with tactile feedback for robotic surgery |
| JP2001322079A (ja) | 2000-05-15 | 2001-11-20 | Sony Corp | 脚式移動ロボット及びその動作教示方法 |
| KR100485038B1 (ko) * | 2000-09-29 | 2005-04-22 | 혼다 기켄 고교 가부시키가이샤 | 2족보행 로봇 |
| JP3655233B2 (ja) * | 2000-11-17 | 2005-06-02 | 本田技研工業株式会社 | 二足ロボットの遠隔操作装置 |
| WO2002045913A1 (en) * | 2000-11-20 | 2002-06-13 | Sony Corporation | Device and method for controlling operation of legged robot, and robot device |
| JP4364634B2 (ja) | 2001-07-13 | 2009-11-18 | ブルックス オートメーション インコーポレイテッド | 二次元3自由度ロボットアームの軌道プラニング及び移動制御戦略 |
| JP2005515903A (ja) * | 2001-11-28 | 2005-06-02 | エヴォリューション ロボティクス インコーポレイテッド | ロボット用センサおよびアクチュエータのハードウェア抽象化層内における抽象化および集合化 |
| JP3568527B2 (ja) * | 2002-03-18 | 2004-09-22 | ソニー株式会社 | 移動体装置 |
| CN101745910B (zh) * | 2002-03-18 | 2014-11-05 | 索尼株式会社 | 移动设备及其控制方法 |
| EP2208581B1 (en) * | 2002-04-26 | 2011-09-07 | Honda Giken Kogyo Kabushiki Kaisha | Control device of legged mobile robot |
| JP3646169B2 (ja) * | 2002-05-07 | 2005-05-11 | 独立行政法人産業技術総合研究所 | 脚式ロボットの歩行制御装置 |
| US20040064195A1 (en) * | 2002-07-15 | 2004-04-01 | Hugh Herr | Variable-mechanical-impedance artificial legs |
| WO2004030870A1 (ja) * | 2002-10-01 | 2004-04-15 | Sony Corporation | ロボット装置及びロボット装置の制御方法 |
| JP3599244B2 (ja) * | 2002-11-06 | 2004-12-08 | ソニー株式会社 | ロボット装置、ロボット装置の運動制御装置並びに運動制御方法 |
| US7295892B2 (en) * | 2002-12-31 | 2007-11-13 | Massachusetts Institute Of Technology | Speed-adaptive control scheme for legged running robots |
| JP2004298975A (ja) | 2003-03-28 | 2004-10-28 | Sony Corp | ロボット装置、障害物探索方法 |
| SE0301531L (sv) | 2003-05-22 | 2004-11-23 | Abb Ab | A Control method for a robot |
| KR101083417B1 (ko) | 2003-06-27 | 2011-11-14 | 혼다 기켄 고교 가부시키가이샤 | 다리식 이동 로봇의 제어장치 |
| JP4587738B2 (ja) | 2003-08-25 | 2010-11-24 | ソニー株式会社 | ロボット装置及びロボットの姿勢制御方法 |
| US8075633B2 (en) * | 2003-09-25 | 2011-12-13 | Massachusetts Institute Of Technology | Active ankle foot orthosis |
| US7603199B2 (en) * | 2003-11-27 | 2009-10-13 | Honda Motor Co., Ltd. | Control device for mobile body |
| WO2005075156A1 (ja) * | 2004-02-06 | 2005-08-18 | Honda Motor Co., Ltd. | 移動ロボットの歩容生成装置 |
| EP1738878B1 (en) | 2004-02-16 | 2011-09-28 | Honda Motor Co., Ltd. | Gait generator for mobile robot |
| JP4503311B2 (ja) * | 2004-02-25 | 2010-07-14 | 本田技研工業株式会社 | 脚体運動補助装具の発生トルク制御方法 |
| JP4971977B2 (ja) * | 2004-03-31 | 2012-07-11 | 本田技研工業株式会社 | 角運動量の変化率に基づいて脚式ロボットを制御する方法 |
| JP4559803B2 (ja) * | 2004-09-14 | 2010-10-13 | 敏男 福田 | 関節角の受動変化を利用して歩行するロボットとその制御方法 |
| JP4548135B2 (ja) * | 2005-02-03 | 2010-09-22 | トヨタ自動車株式会社 | 脚式ロボットとその制御方法 |
| US7835822B2 (en) * | 2005-03-30 | 2010-11-16 | Honda Motor Co., Ltd. | Systems and methods for controlling a legged robot using a two-phase disturbance response strategy |
| US20070123997A1 (en) * | 2005-03-31 | 2007-05-31 | Massachusetts Institute Of Technology | Exoskeletons for running and walking |
| US10307272B2 (en) * | 2005-03-31 | 2019-06-04 | Massachusetts Institute Of Technology | Method for using a model-based controller for a robotic leg |
| US10080672B2 (en) * | 2005-03-31 | 2018-09-25 | Bionx Medical Technologies, Inc. | Hybrid terrain-adaptive lower-extremity systems |
| US20060249315A1 (en) * | 2005-03-31 | 2006-11-09 | Massachusetts Institute Of Technology | Artificial human limbs and joints employing actuators, springs, and variable-damper elements |
| US11278433B2 (en) * | 2005-03-31 | 2022-03-22 | Massachusetts Institute Of Technology | Powered ankle-foot prosthesis |
| US8864846B2 (en) * | 2005-03-31 | 2014-10-21 | Massachusetts Institute Of Technology | Model-based neuromechanical controller for a robotic leg |
| US8512415B2 (en) * | 2005-03-31 | 2013-08-20 | Massachusetts Institute Of Technology | Powered ankle-foot prothesis |
| US8500823B2 (en) * | 2005-03-31 | 2013-08-06 | Massachusetts Institute Of Technology | Powered artificial knee with agonist-antagonist actuation |
| US20070043449A1 (en) * | 2005-03-31 | 2007-02-22 | Massachusetts Institute Of Technology | Artificial ankle-foot system with spring, variable-damping, and series-elastic actuator components |
| US20070162152A1 (en) * | 2005-03-31 | 2007-07-12 | Massachusetts Institute Of Technology | Artificial joints using agonist-antagonist actuators |
| US20070059124A1 (en) * | 2005-08-25 | 2007-03-15 | Palo Alto Research Center Incorporated | Portable personal wearable active third arm |
| JP4641252B2 (ja) * | 2005-12-12 | 2011-03-02 | 本田技研工業株式会社 | 脚式移動ロボットの歩容生成装置 |
| JP4995458B2 (ja) * | 2005-12-12 | 2012-08-08 | 本田技研工業株式会社 | 脚式移動ロボット |
| US20070173973A1 (en) * | 2006-01-24 | 2007-07-26 | Wagner Richard J | Sticky-footed space walking robot & gaiting method |
| JP4692443B2 (ja) * | 2006-09-06 | 2011-06-01 | トヨタ自動車株式会社 | 脚式ロボット |
| US8083013B2 (en) * | 2006-12-06 | 2011-12-27 | The Regents Of The University Of California | Multimodal agile robots |
| JP2008150527A (ja) | 2006-12-19 | 2008-07-03 | Mitsubishi Paper Mills Ltd | スクラッチ発色用インキおよび不可視情報印刷シート |
| JP4143103B2 (ja) * | 2006-12-20 | 2008-09-03 | 本田技研工業株式会社 | 移動装置、ならびにその制御システム、制御プログラムおよび監督システム |
| JP4679527B2 (ja) * | 2007-01-25 | 2011-04-27 | 大成建設株式会社 | 2足歩行ロボット |
| JP5060619B2 (ja) * | 2007-06-08 | 2012-10-31 | 本田技研工業株式会社 | モーション計画方法、モーション計画システム及び記録媒体 |
| US8271138B2 (en) | 2007-09-12 | 2012-09-18 | Intelligent Hospital Systems Ltd. | Gripper device |
| JP5187552B2 (ja) | 2007-09-13 | 2013-04-24 | ソニー株式会社 | 制御装置および方法、プログラム並びに記録媒体 |
| JP4466715B2 (ja) * | 2007-10-25 | 2010-05-26 | トヨタ自動車株式会社 | 脚式ロボット、及びその制御方法 |
| JP4839487B2 (ja) * | 2007-12-04 | 2011-12-21 | 本田技研工業株式会社 | ロボット及びタスク実行システム |
| JP5071140B2 (ja) * | 2008-02-14 | 2012-11-14 | トヨタ自動車株式会社 | 脚式ロボット、及びその制御方法 |
| JP2009214255A (ja) | 2008-03-12 | 2009-09-24 | Toyota Motor Corp | 脚式ロボット、及びその制御方法 |
| KR20110010796A (ko) * | 2008-05-21 | 2011-02-07 | 조지아 테크 리서치 코포레이션 | 힘 균형 유지 이동성 로봇 시스템 |
| JP2009285816A (ja) * | 2008-05-30 | 2009-12-10 | Toyota Motor Corp | 脚式ロボット及びその制御方法 |
| US8242730B2 (en) | 2008-06-10 | 2012-08-14 | Nichols Michael J | Automated robot teach tool and method of use |
| US20110082566A1 (en) * | 2008-09-04 | 2011-04-07 | Herr Hugh M | Implementing a stand-up sequence using a lower-extremity prosthesis or orthosis |
| CA2736079A1 (en) * | 2008-09-04 | 2010-03-11 | Iwalk, Inc. | Hybrid terrain-adaptive lower-extremity systems |
| US8041456B1 (en) * | 2008-10-22 | 2011-10-18 | Anybots, Inc. | Self-balancing robot including an ultracapacitor power source |
| US8160747B1 (en) * | 2008-10-24 | 2012-04-17 | Anybots, Inc. | Remotely controlled self-balancing robot including kinematic image stabilization |
| US8442661B1 (en) * | 2008-11-25 | 2013-05-14 | Anybots 2.0, Inc. | Remotely controlled self-balancing robot including a stabilized laser pointer |
| US8352077B2 (en) * | 2008-12-19 | 2013-01-08 | Honda Motor Co., Ltd. | Inertia shaping for humanoid fall direction change |
| KR20100073438A (ko) * | 2008-12-23 | 2010-07-01 | 삼성전자주식회사 | 로봇 및 그 제어방법 |
| DE102009040145A1 (de) | 2009-09-04 | 2011-03-10 | Kuka Roboter Gmbh | Verfahren und Vorrichtung zum Stillsetzen eines Manipulators |
| US8924015B2 (en) | 2009-09-14 | 2014-12-30 | Honda Motor Co., Ltd. | Whole-body humanoid control from upper-body task specifications |
| JP5232124B2 (ja) * | 2009-10-28 | 2013-07-10 | 本田技研工業株式会社 | 脚式移動ロボットの制御装置 |
| JP5284923B2 (ja) * | 2009-10-28 | 2013-09-11 | 本田技研工業株式会社 | 脚式移動ロボットの制御装置 |
| KR101667032B1 (ko) * | 2009-10-30 | 2016-10-17 | 삼성전자 주식회사 | 로봇의 경로 계획 장치 및 그 방법 |
| KR101075026B1 (ko) | 2009-12-02 | 2011-10-20 | 한국생산기술연구원 | 로봇 하드웨어 설계지원 시스템 및 그의 방법 |
| US9367795B2 (en) * | 2010-02-25 | 2016-06-14 | Honda Motor Co., Ltd. | Momentum-based balance controller for humanoid robots on non-level and non-stationary ground |
| US8457830B2 (en) * | 2010-03-22 | 2013-06-04 | John R. Goulding | In-line legged robot vehicle and method for operating |
| JP2013524880A (ja) * | 2010-04-05 | 2013-06-20 | アイウォーク, インコーポレイテッド | プロテーゼまたは装具におけるトルク制御 |
| US9120512B2 (en) * | 2010-04-22 | 2015-09-01 | Honda Motor Co., Ltd. | Control device and gait generating device for bipedal mobile robot |
| JP5468974B2 (ja) * | 2010-04-22 | 2014-04-09 | 本田技研工業株式会社 | 2足移動ロボットの制御装置及び歩容生成装置 |
| JP5456588B2 (ja) * | 2010-06-07 | 2014-04-02 | 本田技研工業株式会社 | 脚式移動ロボットの制御装置 |
| JP5685842B2 (ja) | 2010-07-12 | 2015-03-18 | セイコーエプソン株式会社 | ロボット装置およびロボット装置の制御方法 |
| US8418705B2 (en) * | 2010-07-30 | 2013-04-16 | Toyota Motor Engineering & Manufacturing North America, Inc. | Robotic cane devices |
| KR101778027B1 (ko) * | 2010-12-21 | 2017-09-13 | 삼성전자주식회사 | 보행 로봇 및 그 자세 제어 방법 |
| US9839552B2 (en) * | 2011-01-10 | 2017-12-12 | Bionx Medical Technologies, Inc. | Powered joint orthosis |
| WO2012097156A2 (en) * | 2011-01-12 | 2012-07-19 | Iwalk, Inc. | Controlling powered human augmentation devices |
| US9687377B2 (en) * | 2011-01-21 | 2017-06-27 | Bionx Medical Technologies, Inc. | Terrain adaptive powered joint orthosis |
| WO2012125562A1 (en) * | 2011-03-11 | 2012-09-20 | Iwalk, Inc. | Biomimetic joint actuators |
| JP5845334B2 (ja) * | 2011-03-21 | 2016-01-20 | 本田技研工業株式会社 | ロボット制御方法および記憶媒体 |
| US8880221B2 (en) * | 2011-03-21 | 2014-11-04 | Honda Motor Co., Ltd. | Damage reduction control for humanoid robot fall |
| US8639386B2 (en) | 2011-05-20 | 2014-01-28 | Harris Corporation | Haptic device for manipulator and vehicle control |
| US8504208B2 (en) * | 2011-05-25 | 2013-08-06 | Honda Motor Co., Ltd. | Mobile object controller and floor surface estimator |
| JP5616290B2 (ja) * | 2011-05-25 | 2014-10-29 | 本田技研工業株式会社 | 移動体の制御装置 |
| US20120316682A1 (en) * | 2011-06-10 | 2012-12-13 | Samsung Electronics Co., Ltd. | Balance control apparatus of robot and control method thereof |
| JP5991857B2 (ja) * | 2011-06-10 | 2016-09-14 | 三星電子株式会社Samsung Electronics Co.,Ltd. | ロボットの均衡制御装置及びその制御方法 |
| JP5930892B2 (ja) * | 2011-09-07 | 2016-06-08 | 本田技研工業株式会社 | 接触状態推定装置及び軌道生成装置 |
| KR20130034082A (ko) * | 2011-09-28 | 2013-04-05 | 삼성전자주식회사 | 로봇 및 그 제어 방법 |
| WO2013067407A1 (en) * | 2011-11-02 | 2013-05-10 | Iwalk, Inc. | Biomimetic transfemoral prosthesis |
| US8805584B2 (en) * | 2011-11-22 | 2014-08-12 | Disney Enterprises, Inc | Kinematic and dynamic calibration methods for legged robots with force-controlled joints |
| KR20130063230A (ko) * | 2011-12-06 | 2013-06-14 | 삼성전자주식회사 | 보행 로봇 및 그 제어 방법 |
| US9032635B2 (en) * | 2011-12-15 | 2015-05-19 | Massachusetts Institute Of Technology | Physiological measurement device or wearable device interface simulator and method of use |
| US9014857B2 (en) | 2012-01-13 | 2015-04-21 | Toyota Motor Engineering & Manufacturing North America, Inc. | Methods and computer-program products for generating grasp patterns for use by a robot |
| KR101985790B1 (ko) * | 2012-02-21 | 2019-06-04 | 삼성전자주식회사 | 보행 로봇 및 그 제어 방법 |
| US9221177B2 (en) | 2012-04-18 | 2015-12-29 | Massachusetts Institute Of Technology | Neuromuscular model-based sensing and control paradigm for a robotic leg |
| WO2013188510A2 (en) * | 2012-06-12 | 2013-12-19 | Iwalk, Inc. | Prosthetic, orthotic or exoskeleton device |
| JP2014100767A (ja) * | 2012-11-20 | 2014-06-05 | Toshiba Corp | 多脚歩行ロボットの段差歩行制御装置及び方法 |
| KR101438970B1 (ko) * | 2012-12-27 | 2014-09-15 | 현대자동차주식회사 | 로봇의 보행제어방법 |
| US9031691B2 (en) | 2013-03-04 | 2015-05-12 | Disney Enterprises, Inc. | Systemic derivation of simplified dynamics for humanoid robots |
| US9649765B2 (en) | 2013-03-11 | 2017-05-16 | Siemens Aktiengesellschaft | Reducing energy consumption of industrial robots by using new methods for motion path programming |
| US9193403B2 (en) * | 2013-03-20 | 2015-11-24 | Honda Motor Co., Ltd | Humanoid fall damage reduction |
| US9044859B2 (en) * | 2013-10-31 | 2015-06-02 | Disney Enterprises, Inc. | Method for gait generation and tracking control for a bipedal walking robot |
| CN203776522U (zh) * | 2014-03-04 | 2014-08-20 | 王庆丰 | 一种可调整姿势的人体模型 |
| US9283949B2 (en) * | 2014-07-22 | 2016-03-15 | Google Inc. | Hybrid hydraulic and electrically actuated mobile robot |
| US9395726B1 (en) * | 2014-07-24 | 2016-07-19 | Google Inc. | Methods and devices for bound and gallop gaits |
| US10081098B1 (en) * | 2014-08-25 | 2018-09-25 | Boston Dynamics, Inc. | Generalized coordinate surrogates for integrated estimation and control |
| US9517561B2 (en) * | 2014-08-25 | 2016-12-13 | Google Inc. | Natural pitch and roll |
| US9895804B1 (en) * | 2014-08-26 | 2018-02-20 | Boston Dynamics, Inc. | Failure mode |
| JP6339467B2 (ja) * | 2014-09-29 | 2018-06-06 | 本田技研工業株式会社 | 移動ロボットの制御装置 |
| JP6356033B2 (ja) * | 2014-09-29 | 2018-07-11 | 本田技研工業株式会社 | 移動体の制御装置 |
| CN104376309B (zh) * | 2014-11-27 | 2018-12-25 | 韩慧健 | 一种基于手势识别的手势运动基元模型结构化方法 |
| US9440353B1 (en) * | 2014-12-29 | 2016-09-13 | Google Inc. | Offline determination of robot behavior |
| US9789920B2 (en) * | 2015-04-01 | 2017-10-17 | Oregon State University | Apparatus and method for energy regulation and leg control for spring-mass walking machine |
| CN108271365B (zh) * | 2015-09-09 | 2021-06-11 | 阿瓦里有限公司 | 游戏机器人、系统及控制游戏机器人的方法 |
| US9586316B1 (en) * | 2015-09-15 | 2017-03-07 | Google Inc. | Determination of robotic step path |
| KR101965071B1 (ko) * | 2017-10-25 | 2019-04-02 | 정승환 | 추진력을 이용한 로봇 동작구현장치 |
| KR20170138977A (ko) * | 2017-12-06 | 2017-12-18 | 삼성전자주식회사 | 보행 로봇 및 그의 위치 인식과 지도 작성을 동시에 수행하는 방법 |
| US11548151B2 (en) * | 2019-04-12 | 2023-01-10 | Boston Dynamics, Inc. | Robotically negotiating stairs |
| WO2020257777A1 (en) * | 2019-06-21 | 2020-12-24 | REHABILITATION INSTITUTE OF CHICAGO d/b/a Shirley Ryan AbilityLab | Wearable joint tracking device with muscle activity and methods thereof |
| CN114474034B (zh) * | 2020-10-26 | 2024-05-28 | 腾讯科技(深圳)有限公司 | 足式机器人运动控制方法、装置、设备及介质 |
| CN112731953B (zh) * | 2020-12-24 | 2024-07-19 | 深圳市优必选科技股份有限公司 | 机器人控制方法、装置、计算机可读存储介质及机器人 |
| US11833680B2 (en) * | 2021-06-25 | 2023-12-05 | Boston Dynamics, Inc. | Robot movement and online trajectory optimization |
| US12168300B2 (en) * | 2021-10-18 | 2024-12-17 | Boston Dynamics, Inc. | Nonlinear trajectory optimization for robotic devices |
-
2014
- 2014-12-30 US US14/586,519 patent/US9517561B2/en active Active
-
2015
- 2015-03-16 US US14/659,012 patent/US9662792B2/en active Active
- 2015-08-14 CN CN202010181342.3A patent/CN111482960B/zh active Active
- 2015-08-14 EP EP15754383.6A patent/EP3186041B1/en active Active
- 2015-08-14 EP EP19155331.2A patent/EP3498434B1/en active Active
- 2015-08-14 CN CN201580032432.3A patent/CN106660206B/zh active Active
- 2015-08-14 JP JP2016572822A patent/JP6483730B2/ja not_active Expired - Fee Related
- 2015-08-14 WO PCT/US2015/045253 patent/WO2016032773A2/en not_active Ceased
-
2017
- 2017-04-24 US US15/495,905 patent/US10105850B2/en active Active
-
2018
- 2018-09-21 US US16/137,796 patent/US10654168B2/en active Active
-
2019
- 2019-02-14 JP JP2019024085A patent/JP6904992B2/ja not_active Expired - Fee Related
-
2020
- 2020-04-27 US US16/858,795 patent/US11426875B2/en active Active
- 2020-12-10 JP JP2020204655A patent/JP2021041532A/ja active Pending
-
2021
- 2021-08-02 JP JP2021126593A patent/JP2021181156A/ja active Pending
-
2022
- 2022-07-25 US US17/814,776 patent/US11911916B2/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230008096A1 (en) * | 2014-08-25 | 2023-01-12 | Boston Dynamics, Inc. | Natural pitch and roll |
| US11911916B2 (en) * | 2014-08-25 | 2024-02-27 | Boston Dynamics, Inc. | Natural pitch and roll |
Also Published As
| Publication number | Publication date |
|---|---|
| US11426875B2 (en) | 2022-08-30 |
| WO2016032773A3 (en) | 2016-07-28 |
| US20230008096A1 (en) | 2023-01-12 |
| US20160052574A1 (en) | 2016-02-25 |
| CN106660206A (zh) | 2017-05-10 |
| JP2021041532A (ja) | 2021-03-18 |
| WO2016032773A2 (en) | 2016-03-03 |
| US10654168B2 (en) | 2020-05-19 |
| US20170225333A1 (en) | 2017-08-10 |
| EP3498434B1 (en) | 2026-03-04 |
| CN111482960A (zh) | 2020-08-04 |
| EP3186041B1 (en) | 2019-04-03 |
| CN111482960B (zh) | 2023-07-11 |
| US10105850B2 (en) | 2018-10-23 |
| US20190022868A1 (en) | 2019-01-24 |
| EP3186041A2 (en) | 2017-07-05 |
| US11911916B2 (en) | 2024-02-27 |
| JP6483730B2 (ja) | 2019-03-13 |
| US9517561B2 (en) | 2016-12-13 |
| EP3498434A1 (en) | 2019-06-19 |
| JP2017529246A (ja) | 2017-10-05 |
| JP2021181156A (ja) | 2021-11-25 |
| JP2019089200A (ja) | 2019-06-13 |
| US9662792B2 (en) | 2017-05-30 |
| US20200254621A1 (en) | 2020-08-13 |
| CN106660206B (zh) | 2020-04-10 |
| US20160052136A1 (en) | 2016-02-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6904992B2 (ja) | 自然なピッチとロール | |
| US12552476B2 (en) | Control of robotic devices with non-constant body pitch | |
| US11865715B2 (en) | Offline optimization to robot behavior | |
| US12194629B2 (en) | Robot movement and online trajectory optimization | |
| JP6823172B2 (ja) | 動的バランスを使用する脚ロボットに対する全身マニピュレーション | |
| US9751220B2 (en) | Flexure based torque sensor | |
| US9833899B1 (en) | Adaptive response to load | |
| KR20250116099A (ko) | 로봇 움직임 및 질량체들과의 상호작용 | |
| US20250196333A1 (en) | Robotic manipulation of objects | |
| KR20250116092A (ko) | 로봇 디바이스들을 위한 데이터 전달 어셈블리들 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190215 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190215 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200227 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20200526 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200814 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201210 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20201210 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20201223 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20201224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210224 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210428 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210526 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210624 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6904992 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |