JP6979128B2 - マルチコプタ - Google Patents
マルチコプタ Download PDFInfo
- Publication number
- JP6979128B2 JP6979128B2 JP2020525300A JP2020525300A JP6979128B2 JP 6979128 B2 JP6979128 B2 JP 6979128B2 JP 2020525300 A JP2020525300 A JP 2020525300A JP 2020525300 A JP2020525300 A JP 2020525300A JP 6979128 B2 JP6979128 B2 JP 6979128B2
- Authority
- JP
- Japan
- Prior art keywords
- lift
- aircraft
- generator
- airframe
- multicopter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C29/00—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft
- B64C29/0008—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded
- B64C29/0016—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded the lift during taking-off being created by free or ducted propellers or by blowers
- B64C29/0025—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded the lift during taking-off being created by free or ducted propellers or by blowers the propellers being fixed relative to the fuselage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D31/00—Power plant control systems; Arrangement of power plant control systems in aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
- B64U30/26—Ducted or shrouded rotors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/10—Propulsion
- B64U50/19—Propulsion using electrically powered motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/10—Air crafts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/02—Initiating means
- B64C13/04—Initiating means actuated personally
- B64C13/042—Initiating means actuated personally operated by hand
- B64C13/0423—Initiating means actuated personally operated by hand yokes or steering wheels for primary flight controls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D31/00—Power plant control systems; Arrangement of power plant control systems in aircraft
- B64D31/02—Initiating means
- B64D31/06—Initiating means actuated automatically
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/30—UAVs specially adapted for particular uses or applications for imaging, photography or videography
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/40—Weight reduction
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/60—Efficient propulsion technologies, e.g. for aircraft
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Motorcycle And Bicycle Frame (AREA)
- Arrangement Or Mounting Of Propulsion Units For Vehicles (AREA)
Description
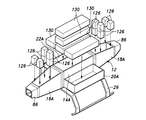
12 :機体
14 :主部機体
14A :箱本体
14B :蓋板
16 :前部機体
16A :箱本体
16B :蓋板
18 :後部機体
18A :箱本体
18B :蓋板
20 :左側機体
20A :箱本体
20B :蓋板
22 :右側機体
22A :箱本体
22B :蓋板
26 :脚体
30 :第1揚力発生装置
32 :上部電動機
34 :上部回転翼
36 :下部電動機
38 :下部回転翼
40 :ファンシュラウド
42 :上部アーム
44 :下部アーム
46 :ブラケット
48 :バンド体
50 :アーム部材
52 :ブラケット
54 :バンド体
56 :アーム部材
58 :アーム部材
60 :アーム部材
62 :バンド体
64 :アーム部材
66 :アーム部材
70 :第2揚力発生装置
72 :上部電動機
74 :上部回転翼
76 :下部電動機
78 :下部回転翼
80 :ファンシュラウド
82 :上部アーム
84 :下部アーム
86 :ブラケット取付部材
88 :ブラケット
90 :ブラケット
92 :バンド体
94 :バンド体
96 :アーム部材
98 :アーム部材
100 :アーム部材
102 :アーム部材
104 :バンド体
106 :アーム部材
108 :アーム部材
110 :座席台
112 :乗員用座席
114 :クリップ
116 :固定ハンドル
120 :ジャイロセンサ
121 :加速度センサ
122 :飛行制御装置
124 :自律飛行制御装置
126 :速度制御装置
130 :バッテリパック(電源バッテリ)
Claims (12)
- 機体と、
前記機体に設けられた揚力発生装置とを有し、
前記揚力発生装置は、前記機体の重心を略中心とする第1同心円上にあって前記機体の前部及び後部に各々左右対称に配置されたN個の第1揚力発生装置及び前記機体の重心を略中心とする前記第1同心円より大径の第2同心円上且つ前記機体の前後方向に延在する中心軸線上にあって前記機体の前方及び後方にのみ配置されたM個の第2揚力発生装置にのみにより構成されているマルチコプタ。(但し、N>Mとする。) - 機体と、
前記機体の重心を略中心とする第1同心円上にあって前記機体の前部及び後部に各々左右対称に配置されたN個の第1揚力発生装置と、
前記機体の重心を略中心とする前記第1同心円より大径の第2同心円上且つ前記機体の前後方向に延在する中心軸線上にあって前記機体の前方及び後方に配置されたM個の第2揚力発生装置とを有し、
前記機体の前部及び後部に配置された前記第1揚力発生装置の前後方向の離間距離及び前記第2揚力発生装置の前後方向の離間距離が、左右に対応するもの同士の前記第1揚力発生装置の左右方向の離間距離より長いマルチコプタ。(但し、N>Mとする。) - 機体と、
前記機体の重心を略中心とする第1同心円上にあって前記機体の前部及び後部に各々左右対称に配置されたN個の第1揚力発生装置と、
前記機体の重心を略中心とする前記第1同心円より大径の第2同心円上且つ前記機体の前後方向に延在する中心軸線上にあって前記機体の前方及び後方に配置されたM個の第2揚力発生装置とを有し、
前記第1揚力発生装置及び前記第2揚力発生装置は各々回転翼を含み、前記第2揚力発生装置の回転翼の半径が前記第1揚力発生装置の回転翼の半径より大きいマルチコプタ。(但し、N>Mとする。) - 機体と、
前記機体の重心を略中心とする第1同心円上にあって前記機体の前部及び後部に各々左右対称に配置されたN個の第1揚力発生装置と、
前記機体の重心を略中心とする前記第1同心円より大径の第2同心円上且つ前記機体の前後方向に延在する中心軸線上にあって前記機体の前方及び後方に配置されたM個の第2揚力発生装置とを有し、
前記機体は、
前後に長い直方体箱状の主部機体と、前記主部機体の前端から前方に延出し、前方に向かうに従って横幅が小さくなり、前部の左右の前記第1揚力発生装置間に突入する前部機体と、
前記主部機体の後端から後方に延出し、後方に向かうに従って横幅が小さくなり、後部の左右の前記第1揚力発生装置間に突入する部分を含む後部機体と、
前後に長い直方体箱状をなして前記主部機体の左側に設けられ、左右対応する側の前後の前記第1揚力発生装置間に突入する部分を含む左側機体と、
前後に長い直方体箱状をなして前記主部機体の右側に設けられ、左右対応する側の前後の前記第1揚力発生装置間に突入する部分を含む右側機体とを有するマルチコプタ。(但し、N>Mとする。) - 前記機体の前部及び後部に配置された前記第1揚力発生装置の前後方向の離間距離及び前記第2揚力発生装置の前後方向の離間距離が、左右に対応するもの同士の前記第1揚力発生装置の左右方向の離間距離より長い請求項1又は3又は4に記載のマルチコプタ。
- 前記第1揚力発生装置及び前記第2揚力発生装置は各々回転翼を含み、前記第2揚力発生装置の回転翼の半径が前記第1揚力発生装置の回転翼の半径より大きい請求項1〜3及び5の何れか一項に記載のマルチコプタ。
- 前記第2揚力発生装置は、隣接する前記第1揚力発生装置に対して、側面視でオーバラップする部分を含む請求項1〜6の何れか一項に記載のマルチコプタ。
- 各第1揚力発生装置及び各第2揚力発生装置が、前記機体の互いに異なる2点から各々延出し、且つ各第1揚力発生装置及び各第2揚力発生装置の中心で互いに結合されて平面視でV字形をなすアームにより支持されている請求項1〜7の何れか一項に記載のマルチコプタ。
- 前記機体は、
前後に長い直方体箱状の主部機体と、前記主部機体の前端から前方に延出し、前方に向かうに従って横幅が小さくなり、前部の左右の前記第1揚力発生装置間に突入する前部機体と、
前記主部機体の後端から後方に延出し、後方に向かうに従って横幅が小さくなり、後部の左右の前記第1揚力発生装置間に突入する部分を含む後部機体と、
前後に長い直方体箱状をなして前記主部機体の左側に設けられ、左右対応する側の前後の前記第1揚力発生装置間に突入する部分を含む左側機体と、
前後に長い直方体箱状をなして前記主部機体の右側に設けられ、左右対応する側の前後の前記第1揚力発生装置間に突入する部分を含む右側機体とを有する請求項1〜3及び5〜8の何れか一項に記載のマルチコプタ。 - 前記主部機体の高さが前記左側機体及び前記右側機体の高さより大きく、前記主部機体上に乗員用座席が配置され、前記左側機体及び前記右側機体が前記乗員用座席に着座した乗員のためのフットレストをなす請求項9に記載のマルチコプタ。
- 前記第1揚力発生装置及び前記第2揚力発生装置は各々回転翼及び前記回転翼を個別に回転駆動する電動機を含み、
前記主部機体、前記左側機体及び前記右側機体の各々に前記電動機のための電源バッテリが収納されている請求項9に記載のマルチコプタ。 - 前記主部機体にジャイロセンサ、加速度センサ及び飛行制御装置のうちの少なくとも一つが設けられ、
前記前部機体及び前記後部機体の各々に各電動機の速度制御装置が設けられている請求項11に記載のマルチコプタ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018118540 | 2018-06-22 | ||
| JP2018118540 | 2018-06-22 | ||
| PCT/JP2019/016641 WO2019244462A1 (ja) | 2018-06-22 | 2019-04-18 | マルチコプタ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2019244462A1 JPWO2019244462A1 (ja) | 2021-01-07 |
| JP6979128B2 true JP6979128B2 (ja) | 2021-12-08 |
Family
ID=68982861
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020525300A Active JP6979128B2 (ja) | 2018-06-22 | 2019-04-18 | マルチコプタ |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11780571B2 (ja) |
| JP (1) | JP6979128B2 (ja) |
| WO (1) | WO2019244462A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12441464B1 (en) | 2019-09-09 | 2025-10-14 | Sifly Aviation, Inc. | Rotor system for electrically powered rotorcraft |
| JP2022054199A (ja) * | 2020-09-25 | 2022-04-06 | eVTOL Japan株式会社 | 電動回転翼航空機 |
| US11840329B1 (en) * | 2021-11-08 | 2023-12-12 | Sifly Aviation, Inc. | Contra-rotating electric helicopter |
| EP4603392A3 (en) | 2022-07-19 | 2025-09-24 | AIRBUS HELICOPTERS DEUTSCHLAND GmbH | A rotorcraft with an energy source storage unit |
| CN119262356B (zh) * | 2024-11-26 | 2025-10-31 | 中国矿业大学 | 一种机架电池共形架构的无人机及其控制方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4223921B2 (ja) | 2003-10-24 | 2009-02-12 | トヨタ自動車株式会社 | 垂直離着陸飛翔装置 |
| US7857253B2 (en) | 2003-10-27 | 2010-12-28 | Urban Aeronautics Ltd. | Ducted fan VTOL vehicles |
| JP2009513435A (ja) * | 2005-11-01 | 2009-04-02 | アーバン エアロノーティクス リミテッド | 屋根と床の流れ |
| US8328130B2 (en) | 2008-12-08 | 2012-12-11 | Honeywell International Inc. | Vertical take off and landing unmanned aerial vehicle airframe structure |
| DE102013104447A1 (de) | 2013-04-30 | 2014-10-30 | Niederberger-Engineering Ag | Automatisiertes und flexibel einsetzbares selbstkletterndes Fahrwerk mit Flugeigenschaften |
| JP2014240242A (ja) | 2013-06-12 | 2014-12-25 | 富士重工業株式会社 | 垂直離着陸飛行体 |
| GB2526517A (en) * | 2014-03-27 | 2015-12-02 | Malloy Aeronautics Ltd | Rotor-Lift Aircraft |
| WO2016136848A1 (ja) * | 2015-02-25 | 2016-09-01 | 株式会社プロドローン | マルチコプター |
| US10683086B2 (en) * | 2015-03-19 | 2020-06-16 | Prodrone Co., Ltd. | Unmanned rotorcraft and method for measuring circumjacent object around rotorcraft |
| JP6261090B2 (ja) * | 2015-05-18 | 2018-01-17 | 株式会社amuse oneself | 無人飛行体 |
| US20170247107A1 (en) * | 2016-02-29 | 2017-08-31 | GeoScout, Inc. | Rotary-wing vehicle and system |
| US10435176B2 (en) * | 2016-05-25 | 2019-10-08 | Skydio, Inc. | Perimeter structure for unmanned aerial vehicle |
| CN107416194A (zh) * | 2017-03-25 | 2017-12-01 | 周良勇 | 一种多旋翼无人机 |
-
2019
- 2019-04-18 JP JP2020525300A patent/JP6979128B2/ja active Active
- 2019-04-18 US US17/054,612 patent/US11780571B2/en active Active
- 2019-04-18 WO PCT/JP2019/016641 patent/WO2019244462A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2019244462A1 (ja) | 2021-01-07 |
| US20210101675A1 (en) | 2021-04-08 |
| WO2019244462A1 (ja) | 2019-12-26 |
| US11780571B2 (en) | 2023-10-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6979128B2 (ja) | マルチコプタ | |
| US10710718B2 (en) | Personal flight vehicle | |
| JP2022515915A (ja) | 電動垂直離着陸航空機 | |
| JP5920557B2 (ja) | 垂直離着陸機 | |
| CN107614376A (zh) | 旋翼机 | |
| US20200385106A1 (en) | Autogyro | |
| CN113911329B (zh) | 飞行体以及动力装置 | |
| KR20170061259A (ko) | 추진 로터가 구비된 멀티콥터 | |
| JPWO2019225607A1 (ja) | 飛行体および飛行体のフレーム | |
| JP7244084B2 (ja) | 電子部品及び当該電子部品を取り付けた飛行体 | |
| CN107757897A (zh) | 三轴飞行器及移动起飞方法 | |
| JP6993948B2 (ja) | 飛翔装置 | |
| EP3434591A1 (en) | Vertical takeoff and landing aircraft | |
| CA2844721A1 (fr) | A platform shaped aircraft capable of carrying a pilot, methods for manufacturing and uses thereof | |
| KR101664899B1 (ko) | 멀티콥터 | |
| CN118004415A (zh) | 旋翼航空器 | |
| JP2011131861A (ja) | 垂直離発着機 | |
| JP7784615B2 (ja) | 飛行装置 | |
| EP4157716B1 (en) | Aircraft thrust and control system | |
| JP7123459B1 (ja) | 飛行装置 | |
| CN116069049B (zh) | 一种五轴涵道飞行器及其控制方法 | |
| JP2020108997A (ja) | 有人飛行体 | |
| JP2021075191A (ja) | 垂直離着陸航空機 | |
| JP2020066392A (ja) | 回転翼式の飛行装置および飛行装置用のアタッチメント | |
| JP2021181309A (ja) | 飛行体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200728 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210803 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210914 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211102 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211112 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6979128 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |