JP7006930B2 - 回転翼機 - Google Patents
回転翼機 Download PDFInfo
- Publication number
- JP7006930B2 JP7006930B2 JP2018130505A JP2018130505A JP7006930B2 JP 7006930 B2 JP7006930 B2 JP 7006930B2 JP 2018130505 A JP2018130505 A JP 2018130505A JP 2018130505 A JP2018130505 A JP 2018130505A JP 7006930 B2 JP7006930 B2 JP 7006930B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- attached
- rotary wing
- motors
- front side
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Toys (AREA)
Description
少なくとも第1方向に沿って前進可能な回転翼機であって、アーム部と、当該アーム部に取り付けられている複数のモータと、当該モータの夫々に取り付けられている回転翼とを備えており、
前記複数のモータは、少なくとも前記第1方向に沿ってみた場合に、前側に位置する一以上の前側モータと後側に位置する一以上の後側モータとによって構成されており、
前記前側モータに含まれるモータの出力特性と、前記後ろ側モータに含まれるモータの出力特性は異なる、
回転翼機が得られる。
[項目1]
少なくとも第1方向に沿って前進可能な回転翼機であって、アーム部と、当該アーム部に取り付けられている複数のモータと、当該モータの夫々に取り付けられている回転翼とを備えており、
前記複数のモータは、少なくとも前記第1方向に沿ってみた場合に、前側に位置する一以上の前側モータと後側に位置する一以上の後側モータとによって構成されており、
前記前側モータに含まれるモータの出力特性と、前記後ろ側モータに含まれるモータの出力特性は異なる、
回転翼機。
[項目2]
請求項1に記載の回転翼機であって、
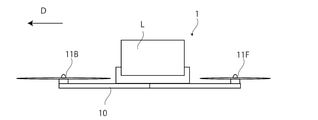
前記回転翼による推力中心よりも下方に設けられた搭載部を更に有しており、
前記後ろ側モータに含まれるモータの出力特性は、前記前側モータに含まれるモータの出力特性よりも高い、
回転翼機。
[項目3]
請求項1に記載の回転翼機であって、
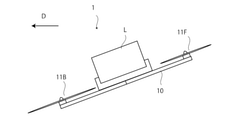
前記回転翼による推力中心よりも上方に設けられた搭載部を更に有しており、
前記後ろ側モータに含まれるモータの出力特性は、前記前側モータに含まれるモータの出力特性よりも小さい、
回転翼機。
[項目4]
請求項1乃至請求項3のいずれかに記載の回転翼機であって、
当該回転翼機は、2つの前側モータと、2つの後側モータとを有している、
回転翼機。
[項目5]
請求項1に記載の回転翼機であって、
少なくとも前記前側モータ又は後側モータのいずれかは、更に複数のグループ化されたモータを含んでおり、
各グループ同士の出力特性は異なる、
回転翼機。
以下、本発明の実施の形態による回転翼機について、図面を参照しながら説明する。
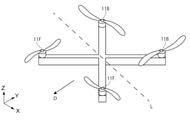
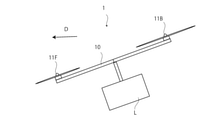
図2に示されるように、本発明の実施の形態による回転翼機1は、プロペラ11F、11B(推力発生部:回転翼)と、プロペラ11F、11Bを回転させるためのモータと、モータが取り付けられているアーム10とを備えている。
前後方向:+Y方向及び-Y方向
上下方向(または鉛直方向):+Z方向及びZ方向
左右方向(または水平方向):+X方向及び-X方向
進行方向(前方):-Y方向
後退方向(後方):+Y方向
上昇方向(上方):+Z方向
下降方向(下方):-Z方向
10 アーム
11F、11B プロペラ
Claims (6)
- 少なくとも第1方向に沿って前進可能な回転翼機であって、アーム部と、当該アーム部に取り付けられている複数のモータと、当該モータの夫々に取り付けられている回転翼とを備えており、
前記複数のモータは、少なくとも前記第1方向に沿ってみた場合に、前側に位置する一以上の前側モータと後側に位置する一以上の後側モータとによって構成されており、
前記前側モータ及び前記後側モータ、または、前記前側モータに取り付けられた前記回転翼及び前記後側モータに取り付けられた前記回転翼、のうち少なくとも何れか一方の構成が互いに異なることにより、前記前側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力と、前記後側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力が、互いに異なり、
前記回転翼による推力中心よりも下方に機体重心が位置し、
前記後側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力は、前記前側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力よりも大きい、
回転翼機。 - 少なくとも第1方向に沿って前進可能な回転翼機であって、アーム部と、当該アーム部に取り付けられている複数のモータと、当該モータの夫々に取り付けられている回転翼とを備えており、
前記複数のモータは、少なくとも前記第1方向に沿ってみた場合に、前側に位置する一以上の前側モータと後側に位置する一以上の後側モータとによって構成されており、
前記前側モータ及び前記後側モータ、または、前記前側モータに取り付けられた前記回転翼及び前記後側モータに取り付けられた前記回転翼、のうち少なくとも何れか一方の構成が互いに異なることにより、前記前側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力と、前記後側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力が、互いに異なり、
前記回転翼による推力中心よりも上方に機体重心が位置し、
前記後側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力は、前記前側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力よりも小さい、
回転翼機。 - 少なくとも第1方向に沿って前進可能な回転翼機であって、アーム部と、当該アーム部に取り付けられている複数のモータと、当該モータの夫々に取り付けられている回転翼とを備えており、
前記複数のモータは、少なくとも前記第1方向に沿ってみた場合に、前側に位置する一以上の前側モータと後側に位置する一以上の後側モータとによって構成されており、
前記前側モータ及び前記後側モータ、または、前記前側モータに取り付けられた前記回転翼及び前記後側モータに取り付けられた前記回転翼、のうち少なくとも何れか一方の構成が互いに異なることにより、前記前側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力と、前記後側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力が、互いに異なり、
前記後側モータに取り付けられた前記回転翼のダイヤは、前記前側モータに取り付けられた前記回転翼のダイヤよりも大きい、
回転翼機。 - 少なくとも第1方向に沿って前進可能な回転翼機であって、アーム部と、当該アーム部に取り付けられている複数のモータと、当該モータの夫々に取り付けられている回転翼とを備えており、
前記複数のモータは、少なくとも前記第1方向に沿ってみた場合に、前側に位置する一以上の前側モータと後側に位置する一以上の後側モータとによって構成されており、
前記前側モータ及び前記後側モータ、または、前記前側モータに取り付けられた前記回転翼及び前記後側モータに取り付けられた前記回転翼、のうち少なくとも何れか一方の構成が互いに異なることにより、前記前側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力と、前記後側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力が、互いに異なり、
前記後側モータに取り付けられた前記回転翼は、前記前側モータに取り付けられた前記回転翼とピッチが異なる、
回転翼機。 - 少なくとも第1方向に沿って前進可能な回転翼機であって、アーム部と、当該アーム部に取り付けられている複数のモータと、当該モータの夫々に取り付けられている回転翼とを備えており、
前記複数のモータは、少なくとも前記第1方向に沿ってみた場合に、前側に位置する一以上の前側モータと後側に位置する一以上の後側モータとによって構成されており、
前記前側モータ及び前記後側モータ、または、前記前側モータに取り付けられた前記回転翼及び前記後側モータに取り付けられた前記回転翼、のうち少なくとも何れか一方の構成が互いに異なることにより、前記前側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力と、前記後側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力が、互いに異なり、
前記後側モータに取り付けられた前記回転翼は、前記前側モータに取り付けられた前記回転翼とブレードの枚数が異なる、
回転翼機。 - 少なくとも第1方向に沿って前進可能な回転翼機であって、アーム部と、当該アーム部に取り付けられている複数のモータと、当該モータの夫々に取り付けられている回転翼とを備えており、
前記複数のモータは、少なくとも前記第1方向に沿ってみた場合に、前側に位置する一以上の前側モータと後側に位置する一以上の後側モータとによって構成されており、
前記前側モータ及び前記後側モータ、または、前記前側モータに取り付けられた前記回転翼及び前記後側モータに取り付けられた前記回転翼、のうち少なくとも何れか一方の構成が互いに異なることにより、前記前側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力と、前記後側モータに含まれるモータ及び当該モータに取り付けられた前記回転翼により得られる推力が、互いに異なり、
前記前側モータに取り付けられた前記回転翼のダイヤと、前記後側モータに取り付けられた前記回転翼のダイヤは同一であり、
前記後側モータは、前記前側モータよりも定格出力が高い、
回転翼機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018130505A JP7006930B2 (ja) | 2018-07-10 | 2018-07-10 | 回転翼機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018130505A JP7006930B2 (ja) | 2018-07-10 | 2018-07-10 | 回転翼機 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017564936A Division JP6578477B2 (ja) | 2017-10-10 | 2017-10-10 | 回転翼機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019069751A JP2019069751A (ja) | 2019-05-09 |
| JP2019069751A5 JP2019069751A5 (ja) | 2021-01-28 |
| JP7006930B2 true JP7006930B2 (ja) | 2022-01-24 |
Family
ID=66441449
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018130505A Active JP7006930B2 (ja) | 2018-07-10 | 2018-07-10 | 回転翼機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7006930B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3838748A1 (en) * | 2018-08-17 | 2021-06-23 | SZ DJI Technology Co., Ltd. | Multi-rotary blade aerial vehicle and control method thereof |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE20206936U1 (de) | 2002-05-02 | 2002-08-22 | Dienlin, Sieghard, Dr., 55124 Mainz | Drehzahlgesteuerter Modellhubschrauber |
| CN205076036U (zh) | 2015-08-19 | 2016-03-09 | 何春旺 | 飞行器 |
| CN107176298A (zh) | 2017-05-28 | 2017-09-19 | 珠海磐磊智能科技有限公司 | 飞行器飞行控制方法及飞行器 |
-
2018
- 2018-07-10 JP JP2018130505A patent/JP7006930B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE20206936U1 (de) | 2002-05-02 | 2002-08-22 | Dienlin, Sieghard, Dr., 55124 Mainz | Drehzahlgesteuerter Modellhubschrauber |
| CN205076036U (zh) | 2015-08-19 | 2016-03-09 | 何春旺 | 飞行器 |
| CN107176298A (zh) | 2017-05-28 | 2017-09-19 | 珠海磐磊智能科技有限公司 | 飞行器飞行控制方法及飞行器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019069751A (ja) | 2019-05-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6308642B1 (ja) | 飛行体 | |
| JP6578477B2 (ja) | 回転翼機 | |
| JP7137257B2 (ja) | 飛行体 | |
| JP6384013B1 (ja) | 飛行体 | |
| JP2018203226A (ja) | 飛行体 | |
| JP6664822B1 (ja) | 飛行体 | |
| WO2019135264A1 (ja) | 飛行体及び飛行体の飛行方法 | |
| JP2024028660A (ja) | 飛行体 | |
| JP7438523B2 (ja) | 飛行体及び飛行体の飛行方法 | |
| JP2019182390A (ja) | 飛行体 | |
| JP6993711B2 (ja) | 飛行体及び飛行体の飛行方法 | |
| JP7006930B2 (ja) | 回転翼機 | |
| JP7137222B2 (ja) | プロペラ、モータ部品及びこれを備えた飛行体 | |
| JP2023076742A (ja) | 飛行体 | |
| JP7398790B2 (ja) | 飛行体 | |
| JP6758697B2 (ja) | 飛行体及び飛行体の飛行方法 | |
| JP6671705B2 (ja) | 飛行体 | |
| JP7711909B2 (ja) | 飛行体 | |
| JP6661162B1 (ja) | プロペラ、モータ部品及びこれを備えた飛行体 | |
| JP2022075257A (ja) | アタッチメント及び飛行体 | |
| JP2022024172A (ja) | 飛行体及び飛行体の飛行方法 | |
| WO2021059323A1 (ja) | アタッチメント及び飛行体 | |
| JPWO2021070363A1 (ja) | 飛行体 | |
| WO2021053786A1 (ja) | 飛行体 | |
| JP2020001464A (ja) | プロペラ、モータ部品及びこれを備えた飛行体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201011 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201011 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210916 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211224 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7006930 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |