JP7007367B2 - 微生物の存在を判定し、前記微生物を同定するための方法、システム、及びコンピュータプログラム製品 - Google Patents
微生物の存在を判定し、前記微生物を同定するための方法、システム、及びコンピュータプログラム製品 Download PDFInfo
- Publication number
- JP7007367B2 JP7007367B2 JP2019510638A JP2019510638A JP7007367B2 JP 7007367 B2 JP7007367 B2 JP 7007367B2 JP 2019510638 A JP2019510638 A JP 2019510638A JP 2019510638 A JP2019510638 A JP 2019510638A JP 7007367 B2 JP7007367 B2 JP 7007367B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- petri dish
- processed
- processed image
- colonies
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

























Classifications
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12Q—MEASURING OR TESTING PROCESSES INVOLVING ENZYMES, NUCLEIC ACIDS OR MICROORGANISMS; COMPOSITIONS OR TEST PAPERS THEREFOR; PROCESSES OF PREPARING SUCH COMPOSITIONS; CONDITION-RESPONSIVE CONTROL IN MICROBIOLOGICAL OR ENZYMOLOGICAL PROCESSES
- C12Q1/00—Measuring or testing processes involving enzymes, nucleic acids or microorganisms; Compositions therefor; Processes of preparing such compositions
- C12Q1/02—Measuring or testing processes involving enzymes, nucleic acids or microorganisms; Compositions therefor; Processes of preparing such compositions involving viable microorganisms
- C12Q1/04—Determining presence or kind of microorganism; Use of selective media for testing antibiotics or bacteriocides; Compositions containing a chemical indicator therefor
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12Q—MEASURING OR TESTING PROCESSES INVOLVING ENZYMES, NUCLEIC ACIDS OR MICROORGANISMS; COMPOSITIONS OR TEST PAPERS THEREFOR; PROCESSES OF PREPARING SUCH COMPOSITIONS; CONDITION-RESPONSIVE CONTROL IN MICROBIOLOGICAL OR ENZYMOLOGICAL PROCESSES
- C12Q1/00—Measuring or testing processes involving enzymes, nucleic acids or microorganisms; Compositions therefor; Processes of preparing such compositions
- C12Q1/02—Measuring or testing processes involving enzymes, nucleic acids or microorganisms; Compositions therefor; Processes of preparing such compositions involving viable microorganisms
- C12Q1/04—Determining presence or kind of microorganism; Use of selective media for testing antibiotics or bacteriocides; Compositions containing a chemical indicator therefor
- C12Q1/045—Culture media therefor
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/20—Image enhancement or restoration using local operators
- G06T5/30—Erosion or dilatation, e.g. thinning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration using two or more images, e.g. averaging or subtraction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
- G06T7/0014—Biomedical image inspection using an image reference approach
- G06T7/0016—Biomedical image inspection using an image reference approach involving temporal comparison
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/136—Segmentation; Edge detection involving thresholding
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/162—Segmentation; Edge detection involving graph-based methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/69—Microscopic objects, e.g. biological cells or cellular parts
- G06V20/695—Preprocessing, e.g. image segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/69—Microscopic objects, e.g. biological cells or cellular parts
- G06V20/698—Matching; Classification
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10024—Color image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20036—Morphological image processing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20076—Probabilistic image processing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20212—Image combination
- G06T2207/20224—Image subtraction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30024—Cell structures in vitro; Tissue sections in vitro
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Chemical & Material Sciences (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Organic Chemistry (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Health & Medical Sciences (AREA)
- Wood Science & Technology (AREA)
- Zoology (AREA)
- Proteomics, Peptides & Aminoacids (AREA)
- Molecular Biology (AREA)
- Biochemistry (AREA)
- Genetics & Genomics (AREA)
- Analytical Chemistry (AREA)
- Biotechnology (AREA)
- Immunology (AREA)
- Microbiology (AREA)
- Toxicology (AREA)
- Biophysics (AREA)
- General Engineering & Computer Science (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Quality & Reliability (AREA)
- Biomedical Technology (AREA)
- Multimedia (AREA)
- Apparatus Associated With Microorganisms And Enzymes (AREA)
- Measuring Or Testing Involving Enzymes Or Micro-Organisms (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
Description
- アルファ溶血現象は、血液寒天上で増殖する細菌コロニーを囲む緑がかった変色を生じさせる。この種の溶血現象は、血液寒天の赤血球のヘモグロビンの部分的分解を表す。
- ベータ溶血現象は、細菌コロニーの近くにある赤血球のヘモグロビンの全分解を表す。
- ガンマ溶血現象は細菌コロニーの周辺領域に如何なる分解もないことに対応する。
- ペトリ皿の少なくとも一つの初期画像を取得するステップであって、第一の初期画像が一又は複数の可視画素を含み、各画素が画素値と関連付けられているステップ;
- 少なくとも一つの初期画像に第一の処理を適用することによってペトリ皿の第一の処理済み画像を取得するステップであって、第一の処理済み画像の可視画素が微生物の一又は複数のコロニーに関連する画素のみに関連付けられているステップ;
- 第一の処理済み画像に第二の処理を適用することによってペトリ皿の複数の第二の処理済み画像を得るステップであって、第二の処理済み画像の可視画素が微生物の一又は複数のコロニーと微生物の前記一又は複数のコロニーの周辺の周囲ゾーンとに関連付けられた画素のみに関連しているステップ;
- 少なくとも一つの初期画像と複数の第二の処理済み画像との間の差分を計算することによってペトリ皿の複数の第三の処理済み画像を取得するステップであって、複数の第三の処理済み画像が培地に関連付けられた画素のみに関連する可視画素を含むステップ;
- 複数の第二の処理済み画像と第一の処理済み画像との間の差分を計算することによってペトリ皿の複数の第四の処理済み画像を取得するステップであって、複数の第四の処理済み画像の可視画素が周囲ゾーンに関連付けられた画素のみに関連しているステップ;
- 複数の第三の処理済み画像の平均画素値と複数の第四の処理済み画像の平均画素値との間の差分値を、赤緑青(RGB)色チャネルの少なくとも各色チャネルについて計算することによって、複数の第三及び第四の処理済み画像に関連付けられた特徴量を決定するステップ;
- 決定された特徴量を分類することによって、ペトリ皿中の周囲ゾーン内の少なくとも一種の特定された微生物の存在の指標の値を決定するステップ;
- 指標の値を閾値と比較するステップ;
- 比較の結果に応じて、ペトリ皿中の周囲ゾーン内の少なくとも一種の特定された微生物の存在を判定するステップ
を含む、方法が提供される。
- 画素値の算術平均、又は
- 画素値の中央値。
- ペトリ皿の少なくとも一つの初期画像の第一の処理済み画像を取得するための第一の処理ユニットであって、第一の処理済み画像の可視画素が微生物の一又は複数のコロニーに関連付けられた画素のみに関連する第一の処理ユニット;
- ペトリ皿の第一の処理済み画像の複数の第二の処理済み画像を取得するための第二の処理ユニットであって、第二の処理済み画像の可視画素が微生物の一又は複数のコロニーと微生物の前記一又は複数のコロニーの周辺の周囲ゾーンとに関連付けられた画素のみに関連する第二の処理ユニット;
- 第二の初期画像と第二の処理済み画像との間の差分を計算することによってペトリ皿の複数の第三の処理済み画像を取得するためと、第二の処理済み画像と第一の処理済み画像との間の差分を計算することによってペトリ皿の複数の第四の処理済み画像を取得するための計算ユニットであって、第三の処理済み画像が培地に関連付けられた画素のみに関連し、第四の処理済み画像の可視画素が周囲ゾーンに関連付けられた画素のみに関連する計算ユニット;
- 第三の処理済み画像の平均画素値と第四の処理済み画像の平均画素値との間の差分値をRGB色チャネルの少なくとも各色チャネルに対して計算することによって、複数の第三の処理済み画像と第四の処理済み画像に関連付けられた特徴量を決定するための特徴抽出ユニット;
- 及びペトリ皿中の周囲ゾーン内の少なくとも一種の特定された微生物の存在の指標の値を決定し、指標の値を閾値と比較し;かつ比較の結果に応じて、ペトリ皿中の周囲ゾーン内の少なくとも一種の特定された微生物の存在を判定するための分析ユニット
を備える、システムが提供される。
- サンプル凹所内へのサンプルの添加及び取出し;
- サンプル凹所内へのサンプル位置決めのチェック及び調整;
- 輝度レベルの制御;
- 赤、緑、青成分バランスの制御;
- 露光時間の制御;
- 照明組合せの制御;
- システムの検査;
- システムの較正;及び
- 使用及び分析目的に基づく任意の他の適切な制御。
分析ユニット110は、細菌の存在を判定し、前記細菌を同定するために、決定された特徴量に基づいて分析処理を動作させることができる。より具体的には、分析ユニット110は、指標の値を、決定された閾値と該指標の値を比較するために決定する。比較の結果に応じて、分析ユニット110はペトリ皿内の細菌の存在又は細菌の非存在の何れかを判定する。

CultureMediumMaskは、培地の元の色、つまり微生物の増殖による影響を受けていない色を示す。

本願の状況では、決定された膨張パラメータはd=50ピクセルである。

に示され、以下の3σ規則(5)に基づく閾値は、以下に示されるように正規分布を決定するように設定される:

図18bは、膨張パラメータd=10ピクセルのHaloMaskの例を示している。

- p(Halo)はハローの存在の先験確率であり;
- そして、p(Halo;X)は、値Xが与えられた場合のハロー存在の確率である。

- そして、p(Proteus)は、プロテウス菌の存在の先験確率である。
p(Proteus)、p(X;Proteus)、p(NoProteus)及びP(X;NoProteus)は、教師あり学習プロセスに使用されるデータセットから既知である。


ベータ溶血性細菌の検出に関する方法はまた単一細菌コロニーと血液寒天培地、例えばCOS及びCAN培地とを含むペトリ皿を含む第二のデータセットにも適用されており、前記ペトリ皿は24時間インキュベートされている。
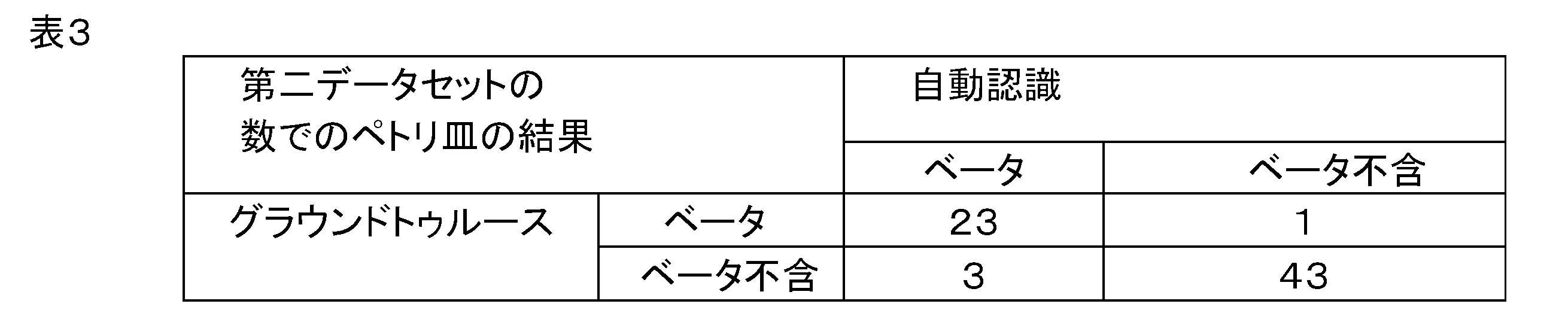

表1、2、3及び4に示された結果は、ベータ溶血性細菌の検出のための本発明の方法に対して95%の高レベルの精度を示している。


感度レベルは、また良好なレベルである78%である。上記のように、データセットは、ハローゾーンを有さないプロテウス菌を含むペトリ皿を含む。表6に記載のペトリ皿の22%の目視検査は、前記ペトリ皿の大部分がハローゾーンを有さないプロテウス菌を含んでいることを示している。また、コロニーの境界は、教師ありモデルアルゴリズムによってハローゾーンであると誤って検出されているようである。しかしながら、統計的中央画素値の使用はこの問題を克服する。



- そしてp(Proteus)は、プロテウス菌の存在の先験確率である。
円は、表6及び7に示された偽陽性結果の検出を示す。





[1] Pedro F. Felzenszwalb, Daniel P. Huttenlocher,「効率的なグラフベースの画像セグメンテーション」; International Journal of Computer Vision, 2004年9月、第59巻、第2号、167-181頁
Claims (17)
- 微生物の一又は複数のコロニーと培地とを含むペトリ皿中の少なくとも一種の特定された微生物の存在を判定するための方法であって、前記培地が、微生物の一又は複数のコロニーと、存在する場合前記少なくとも一種の特定された微生物とが適切な増殖条件下で増殖するのを可能にするように適応されている方法において、
- 撮像システムを用いて、ペトリ皿の少なくとも一つの初期画像を取得するステップであって、第一の初期画像が複数の可視画素を含み、各画素が画素値と関連付けられているステップ;
- 少なくとも一つの初期画像に第一の処理を適用することによってペトリ皿の第一の処理済み画像を取得するステップであって、第一の処理済み画像の可視画素が微生物の一又は複数のコロニーに関連付けられた画素のみに関連しているステップ;
- 第一の処理済み画像に第二の処理を適用することによってペトリ皿の複数の第二の処理済み画像を取得する ステップであって、第二の処理済み画像の可視画素が微生物の一又は複数のコロニーと微生物の前記一又は複数のコロニーの周辺の周囲ゾーンとに関連付けられた画素のみに関連しているステップ;
- 少なくとも一つの初期画像と複数の第二の処理済み画像との間の差分を計算することによってペトリ皿の複数の第三の処理済み画像を取得するステップであって、複数の第三の処理済み画像が培地に関連付けられた画素のみに関連する可視画素を含むステップ;
- 複数の第二の処理済み画像と第一の処理済み画像との間の差分を計算することによってペトリ皿の複数の第四の処理済み画像を取得するステップであって、複数の第四の処理済み画像の可視画素が周囲ゾーンに関連付けられた画素のみに関連しているステップ;
- 複数の第三の処理済み画像の平均画素値と複数の第四の処理済み画像の平均画素値との間の差分値を、赤緑青(RGB)色チャネルの少なくとも各色チャネルについて計算することによって、複数の第三及び第四の処理済み画像に関連付けられた特徴量を決定するステップ;
- 決定された特徴量を分類することによって、ペトリ皿中の周囲ゾーン内の少なくとも一種の特定された微生物の存在の指標の値を決定するステップ;
- 指標の値を閾値と比較するステップ;
- 比較の結果に応じて、ペトリ皿中の周囲ゾーン内の少なくとも一種の特定された微生物の存在を判定するステップ
を含む、方法。 - 第一の処理がセグメンテーション処理である、請求項1に記載の方法。
- セグメンテーション処理が、閾値の決定と、画素値と前記閾値の比較とを含む、請求項2に記載の方法。
- 前記セグメンテーション処理が、グラフベースの領域セグメンテーション処理である、請求項2に記載の方法。
- 第二の処理が、複数の定義された値を有する膨張基準に関連付けられた膨張処理である、請求項1に記載の方法。
- 特徴量を決定するステップが、複数の第三の処理済み画像と第四の処理済み画像を画素パッチに分割することを含む、請求項1に記載の方法。
- 各画素パッチについて、前記第三の処理済み画像と第四の処理済み画像の画素値間の画素値の最大差分を計算することを更に含む、請求項6に記載の方法。
- 特徴量を決定するステップが、グレースケール画像に対して画素値の最大差分を計算することを含む、請求項7に記載の方法。
- 特徴量を決定するステップが、複数の第一の処理済み画像の中央画素値とHSV空間に対する複数の第一の処理済み画像の中央画素値とを計算することを含む、請求項1に記載の方法。
- 特徴量を分類するステップが、特徴量の分布をガウス分布と比較することを含む、請求項1に記載の方法。
- 特徴量を分類するステップが、分類及び回帰ツリーアルゴリズムとサポートベクトルアルゴリズムを適用して、対応する第一及び第二スコアを提供することを含む、請求項1に記載の方法。
- 特徴量を分類するステップが、ベイズ定理を第一及び第二スコアに適用することを更に含む、請求項11に記載の方法。
- 指標の値を閾値と比較するステップが、ガウス分布の平均と標準偏差σに基づいて閾値を決定することを含む、請求項1に記載の方法。
- 少なくとも特定された微生物の存在を判定するステップが、ベータ溶血性細菌である細菌の存在を判定することを含む、請求項1、2、3、5、6、7、8、10又は13の何れか一項に記載の方法。
- 少なくとも特定された微生物の存在を判定するステップが、プロテウス菌である細菌の存在を判定することを含む、請求項1、4、9、11又は12の何れか一項に記載の方法。
- 微生物の一又は複数のコロニーと培地とを含むペトリ皿中の少なくとも一種の特定された微生物の存在を判定するためのシステムであって、前記培地が、微生物の一又は複数のコロニーと、存在する場合前記少なくとも一種の特定された微生物とが適切な増殖条件下で増殖するのを可能にするように適応されており、ペトリ皿の少なくとも一つの初期画像を取得するための撮像システムと、処理システム(108)とを備えるシステム(100)において、前記処理システム(108)が、
- ペトリ皿の少なくとも一つの初期画像の第一の処理済み画像を取得するための第一の処理ユニットであって、第一の処理済み画像の可視画素が微生物の一又は複数のコロニーに関連付けられた画素のみに関連する第一の処理ユニット(116);
- ペトリ皿の第一の処理済み画像の複数の第二の処理済み画像を取得するための第二の処理ユニットであって、第二の処理済み画像の可視画素が微生物の一又は複数のコロニーと微生物の前記一又は複数のコロニーの周辺の周囲ゾーンとに関連付けられた画素のみに関連する第二の処理ユニット(118);
- 別の初期画像と第二の処理済み画像との間の差分を計算することによってペトリ皿の複数の第三の処理済み画像を取得するためと、第二の処理済み画像と第一の処理済み画像との間の差分を計算することによってペトリ皿の複数の第四の処理済み画像を取得するための計算ユニットであって、第三の処理済み画像の可視画素が培地に関連付けられた画素のみに関連し、第四の処理済み画像の可視画素が周囲ゾーンに関連付けられた画素のみに関連する計算ユニット(120);
- 第三の処理済み画像の平均画素値と第四の処理済み画像の平均画素値との間の差分値をRGB色チャネルの少なくとも各色チャネルに対して計算することによって、複数の第三の処理済み画像と第四の処理済み画像に関連付けられた特徴量を決定するための特徴抽出ユニット(122);
- 及びペトリ皿中の周囲ゾーン内の少なくとも一種の特定された微生物の存在の指標の値を決定し、指標の値を閾値と比較し;かつ比較の結果に応じて、ペトリ皿中の周囲ゾーン内の少なくとも一種の特定された微生物の存在を判定するための分析ユニット(110)
を備える、システム(100)。 - プログラマブルデータ処理装置に請求項1から15の何れか一項に記載の方法のステップを実行させるためのコンピュータプログラム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16187153.8A EP3290524A1 (en) | 2016-09-02 | 2016-09-02 | Method, system and computer program product for determining the presence of microorganisms and identifying said microorganisms |
| EP16187153.8 | 2016-09-02 | ||
| EP16306113 | 2016-09-05 | ||
| EP16306113.8 | 2016-09-05 | ||
| PCT/EP2017/071775 WO2018041900A1 (en) | 2016-09-02 | 2017-08-30 | Method, system and computer program product for determining the presence of microorganisms and identifying said microorganisms |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019531065A JP2019531065A (ja) | 2019-10-31 |
| JP2019531065A5 JP2019531065A5 (ja) | 2020-10-08 |
| JP7007367B2 true JP7007367B2 (ja) | 2022-01-24 |
Family
ID=59738363
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019510638A Expired - Fee Related JP7007367B2 (ja) | 2016-09-02 | 2017-08-30 | 微生物の存在を判定し、前記微生物を同定するための方法、システム、及びコンピュータプログラム製品 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10968473B2 (ja) |
| EP (1) | EP3507378B1 (ja) |
| JP (1) | JP7007367B2 (ja) |
| CN (1) | CN109661473B (ja) |
| ES (1) | ES2823151T3 (ja) |
| WO (1) | WO2018041900A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111286523A (zh) * | 2020-02-20 | 2020-06-16 | 中国水产科学研究院黄海水产研究所 | 一种细菌的三原色鉴别及计数方法 |
| FR3109159B1 (fr) * | 2020-04-09 | 2023-06-23 | Interscience | Procédé de traitement d’images appliqué aux compteurs de colonies en microbiologie |
| CN116263955A (zh) * | 2023-01-18 | 2023-06-16 | 浙江泰林医学工程有限公司 | 一种自动菌落计数方法及系统 |
| CN116128845B (zh) * | 2023-02-10 | 2024-05-07 | 甘肃省科学院生物研究所 | 一种基于随机漫步的菌落自动计数方法及菌落计数器 |
| CN117557583B (zh) * | 2024-01-10 | 2024-03-15 | 江苏锡澄环境科学研究院有限公司 | 基于图像处理的电泳线废水处理效果视觉检测方法 |
| CN117953495B (zh) * | 2024-03-27 | 2024-06-04 | 北京大学口腔医学院 | 一种口腔微生物菌群群落分割方法 |
| CN118196087B (zh) * | 2024-05-15 | 2024-08-02 | 江苏海枫达生物科技有限公司 | 一种基于图像采集的微生物菌落检测系统及其方法 |
| CN119842475A (zh) * | 2025-03-18 | 2025-04-18 | 浙江鹰旸医药研发有限公司 | 一种微生物智能培养识别分析系统及方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002125696A (ja) | 2000-10-19 | 2002-05-08 | National Institute Of Advanced Industrial & Technology | 媒体中の生細胞の検出および該媒体のpH測定のための方法 |
| JP2003116593A (ja) | 2001-10-17 | 2003-04-22 | Hakuju Inst For Health Science Co Ltd | 微生物の判定方法およびその装置 |
| JP2014513960A (ja) | 2011-05-06 | 2014-06-19 | ビオメリュー | バイオ画像化方法及びシステム |
| JP2015536140A (ja) | 2012-11-07 | 2015-12-21 | バイオメリュー | バイオイメージング法 |
| JP2016052256A (ja) | 2014-09-02 | 2016-04-14 | 株式会社エヌテック | 微生物検出方法、微生物検出装置及びプログラム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5694478A (en) * | 1994-12-15 | 1997-12-02 | Minnesota Mining And Manufacturing Company | Method and apparatus for detecting and identifying microbial colonies |
| US20020086289A1 (en) * | 1999-06-15 | 2002-07-04 | Don Straus | Genomic profiling: a rapid method for testing a complex biological sample for the presence of many types of organisms |
| CN1536090A (zh) * | 2003-04-07 | 2004-10-13 | 中国人民解放军军事医学科学院卫生学 | 食源性致病菌快速检测基因芯片及其应用 |
| US20040253660A1 (en) * | 2003-06-12 | 2004-12-16 | Giles Scientific, Inc. | Automated microbiological testing apparatus and method |
| WO2008130445A2 (en) * | 2006-11-10 | 2008-10-30 | Advanced Analytical Technologies, Inc. | Rapid detection microorganisms in fluids |
| MX336963B (es) * | 2008-02-19 | 2016-02-08 | Becton Dickinson Co | Sistemas y metodos de identificacion presuntiva de microorganismos tipo en un cultivo. |
| JP5439096B2 (ja) | 2009-09-08 | 2014-03-12 | 株式会社日立ハイテクノロジーズ | 細菌分類装置および細菌検査前処理装置 |
-
2017
- 2017-08-30 WO PCT/EP2017/071775 patent/WO2018041900A1/en not_active Ceased
- 2017-08-30 CN CN201780054167.8A patent/CN109661473B/zh not_active Expired - Fee Related
- 2017-08-30 JP JP2019510638A patent/JP7007367B2/ja not_active Expired - Fee Related
- 2017-08-30 US US16/325,541 patent/US10968473B2/en not_active Expired - Fee Related
- 2017-08-30 EP EP17758553.6A patent/EP3507378B1/en active Active
- 2017-08-30 ES ES17758553T patent/ES2823151T3/es active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002125696A (ja) | 2000-10-19 | 2002-05-08 | National Institute Of Advanced Industrial & Technology | 媒体中の生細胞の検出および該媒体のpH測定のための方法 |
| JP2003116593A (ja) | 2001-10-17 | 2003-04-22 | Hakuju Inst For Health Science Co Ltd | 微生物の判定方法およびその装置 |
| JP2014513960A (ja) | 2011-05-06 | 2014-06-19 | ビオメリュー | バイオ画像化方法及びシステム |
| JP2015536140A (ja) | 2012-11-07 | 2015-12-21 | バイオメリュー | バイオイメージング法 |
| JP2016052256A (ja) | 2014-09-02 | 2016-04-14 | 株式会社エヌテック | 微生物検出方法、微生物検出装置及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019531065A (ja) | 2019-10-31 |
| EP3507378A1 (en) | 2019-07-10 |
| CN109661473B (zh) | 2022-06-07 |
| US10968473B2 (en) | 2021-04-06 |
| US20190203257A1 (en) | 2019-07-04 |
| EP3507378B1 (en) | 2020-07-29 |
| CN109661473A (zh) | 2019-04-19 |
| WO2018041900A1 (en) | 2018-03-08 |
| ES2823151T3 (es) | 2021-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7007367B2 (ja) | 微生物の存在を判定し、前記微生物を同定するための方法、システム、及びコンピュータプログラム製品 | |
| JP6062059B2 (ja) | バイオイメージング法 | |
| CN103748452B (zh) | 生物成像方法和系统 | |
| KR102664258B1 (ko) | 콜로니 콘트라스트 수집 | |
| Abdullah et al. | Localization and segmentation of optic disc in retinal images using circular Hough transform and grow-cut algorithm | |
| EP3286732B1 (en) | Method and system for automatically counting microbial colonies | |
| US20220213523A1 (en) | Methods and systems for automated assessment of antibiotic sensitivity | |
| Pandit et al. | Literature review on object counting using image processing techniques | |
| US20240018459A1 (en) | Analyzing apparatus, analyzing system, analyzing method, and computer-readable non-transitory storage medium | |
| EP3290524A1 (en) | Method, system and computer program product for determining the presence of microorganisms and identifying said microorganisms | |
| KR20210095955A (ko) | 세균 콜로니의 세균 성장을 모니터링하고 콜로니 생물량을 예측하기 위한 시스템 및 방법 | |
| AU2015255243B2 (en) | Bio-Imaging Method And System |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20191219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20191219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200831 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200831 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20200831 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20200911 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201117 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210216 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20210517 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210713 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211115 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20211115 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20211125 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20211130 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211221 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220106 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7007367 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |