以下、本発明の実施の形態について詳細に説明する。なお、図面の上下左右等の位置関係は、特に断らない限り、図面に示す位置関係に基づくものとする。また、図面の寸法比率は、図示の比率に限定されるものではない。さらに、以下の実施の形態は、本発明を説明するための例示であり、本発明をその実施の形態のみに限定する趣旨ではなく、本発明は、その要旨を逸脱しない限り、さまざまな変形が可能である。
以下では、まず「I.第1の処理装置」において、被処理物Tを折り畳み等する処理装置1及びその変形例について説明する。
次に、「II.第2の処理装置」において、乾燥機等で乾燥等された被処理物Tを、当該乾燥機等から取り出して折り畳み等する処理装置1B及びその変形例について説明する。
その次に、「III.第3の処理装置」において、3つの保持装置を用いて被処理物Tを折り畳み等する処理装置1C及びその変形例について説明する。
I.第1の処理装置
はじめに、被処理物の折り畳み等の動作について、処理装置1を例にとって説明する。
<処理装置1の全体構成>
処理装置1は、変形性薄物としての被処理物Tを保持、認識、折り畳み、および、搬送する装置であって、図1に示されるように、大略、フレーム100と、受入搬送装置200と、保持装置300A,300Bと、載置装置400と、撮像装置500と、挟持装置700と、搬送装置800と、制御装置900(図10)とを備えている。
なお、被処理物Tは、例えば、衣類およびタオル類などの布地、フィルム、紙ならびにシートなどに代表される変形性薄物であって、その形状は、タオル類のように矩形であってもよいし、Tシャツやランニングシャツのような略矩形であってもよい。
<フレーム100>
フレーム100は、4本のフレーム枠102と、当該フレーム枠102の下部に設けられたフレーム台104とで構成されている。また、前後方向(矢印Y方向)に隣り合うフレーム枠102の上端同士は、横フレーム枠105で連結されている。さらに、フレーム枠102の間にはそれぞれ壁面が設けられている。これにより、処理装置1には閉じられた内部空間が形成されている。なお、以下の説明では、扉本体210が取り付けられる壁面を正面106Aとして、これに対向する壁面を背面106B、右側の壁面を右側面106C、左側の壁面を左側面106Dという。またフレーム及び壁面を含めて「筐体」ともいう。
<受入搬送装置200>
受入搬送装置200は、被処理物Tを外部から受け入れるための装置であり、図2~図4に示されるように、扉202(図2)と、搬送コンベヤ204(図3)とを備えている。この受入搬送装置200は、後述する制御装置900と有線または無線により通信可能に接続されている。そして、この制御装置900により、搬送コンベヤ204の動作が制御される。
扉202は、ユーザがアクセスし易い、処理装置1における正面106Aの中央やや下寄りに配設されている。扉202は、図2に示されるように、扉本体210と、扉用軸212と、一対の扉用軸保持部材214と、扉開閉モータ216と、扉開閉モータ動力伝達手段218と、被処理物受け部材220と、障害部材222とを有している。
扉本体210は、処理装置1の正面106Aに形成された開口部O(図1)を開閉するための矩形板材である。扉用軸212は、この扉本体210の下端部において、その回転軸が幅方向(矢印X方向)に沿うように取り付けられている。
一対の扉用軸保持部材214は、扉用軸212の両端部を回動自在に保持する。また、各扉用軸保持部材214は、正面106Aの裏側に取り付けられている。
扉開閉モータ216は、正転および逆転が可能なモータであり、正面106Aの裏面における開口部Oの近傍に取り付けられている。
扉開閉モータ動力伝達手段218は、駆動側プーリ224と、従動側プーリ226と、ベルト228とで構成されている。駆動側プーリ224は、扉開閉モータ216の出力軸端に取り付けられている。従動側プーリ226は、扉用軸212における扉開閉モータ216の近傍に取り付けられている。ベルト228は、駆動側プーリ224と従動側プーリ226との間に架け渡されている。
以上の構成により、扉開閉モータ216の回動力が扉開閉モータ動力伝達手段218を介して扉用軸212に伝達される。扉用軸212が回転軸を中心に回転すると、当該扉用軸212を中心として扉本体210が回動する。扉本体210が回動することにより、開口部Oが開閉される。
被処理物受け部材220は、図4に示されるように、一対の側面板230と、底面板232と、背面板234とで構成されている。被処理物受け部材220は、扉本体210の内面に取り付けられている。被処理物受け部材220を当該扉本体210に取り付けることにより、扉本体210の裏側に処理が終わった被処理物Tを受け入れるスペースが形成される。このスペースには、被処理物受入箱Rが配置されている。被処理物受入箱Rに代えて篭を用いてもよいし、底面板232に、直接、処理済みの被処理物Tを載置してもよい。
障害部材222は、円弧状の断面を有しており、幅方向(矢印X方向)に延びる長尺の部材である。障害部材222の高さ(矢印Z方向)は、適宜設定できるが、例えば、保持機構322の略円板の把持部材328(図6参照)の直径(例えば10~20mm)と同程度又はやや大きくなるように設けることが好ましい。これにより、障害部材222に乗り上がった被処理物を、保持機構322の把持部材328の全面で把持できる。
また、障害部材222の背面(扉本体210に対向する凸面)には、一対の支持部材236の一方端がそれぞれ接続されている。これら支持部材236の他方端は、それぞれ被処理物受け部材220を構成する側面板230の下端部に接続されている。これにより、障害部材222は、被処理物受け部材220よりもさらに奥まった位置において、扉本体210に対して略平行に配置されている。
搬送コンベヤ204は、図3に示されるように、扉本体210を閉じた状態における被処理物受け部材220の直下に配設されている。搬送コンベヤ204は、フレーム台104から略垂直に立設された4本の支持フレーム238と、一対のローラ240と、コンベヤベルト242と、コンベヤ駆動モータ244と、コンベヤ駆動モータ動力伝達手段246とを備えている。
一対のローラ240は、それぞれ一対の支持フレーム238の間において、その回転軸が幅方向(矢印X方向)に沿うように、回転可能に架設されている。また、各ローラ240の高さ方向の位置は、両ローラ240の表面の上端同士を結ぶ線が、扉本体210を閉じた状態における障害部材222の下端から、コンベヤベルト242の厚さよりもやや離間するように設定されている。したがって、扉本体210を閉じた状態で、障害部材222の下端は、コンベヤベルト242の上面の近傍に位置することになる。コンベヤベルト242は、一対のローラ240の間に架け渡されている。
コンベヤ駆動モータ244は、正転および逆転が可能なモータであり、図3に示されるように、フレーム台104の上面に取り付けられている。コンベヤ駆動モータ動力伝達手段246は、駆動側プーリ248と、従動側プーリ250と、ベルト252とで構成されている。駆動側プーリ248は、コンベヤ駆動モータ244の出力軸端に取り付けられている。従動側プーリ250は、一方のローラ240に取り付けられている。ベルト252は、駆動側プーリ248と従動側プーリ250との間に架け渡されている。
以上の構成により、コンベヤ駆動モータ244の回転力がコンベヤ駆動モータ動力伝達手段246を介して一方のローラ240(扉202の直下に配置されたローラ240)に伝達される。一方のローラ240が回転すると、コンベヤベルト242も同方向に回転する。後述するように、コンベヤ駆動モータ244の回転方向(順方向/逆方向)は制御装置900によって制御される。なお、本明細書では、コンベヤベルト242が扉本体210から離間するような回転を「順方向回転」といい、扉本体210に近づくような回転を「逆方向回転」という。
<保持装置300>
保持装置300は、受入搬送装置200の搬送コンベヤ204に載せられた被処理物Tを保持して引き上げるとともに、載置装置400と協働して、被処理物Tの認識および折り畳みを行う装置である。(少なくとも、上述した搬送コンベヤ204と、障害部材222と、保持装置300とで被処理物Tの保持システムが構成される。)。
処理装置1は、図1に示されるように、一対の保持装置300A,300Bを備えており、各保持装置300A,300Bは、それぞれ、保持機構310A,310Bおよび移動機構320A,320Bを備えている。なお、一対の保持装置300A,300Bは、前後方向(矢印Y方向)に並べて配置されている。以下の説明では、扉202に近い方を保持装置およびその構成要素に枝番「A」を付し、扉202から遠い方の保持装置およびその構成要素に枝番「B」を付して区別する。
一対の保持装置300A、300Bは、載置装置400に対して、上下方向(Z方向)、幅方向(X方向)、前後方向(Y方向)にそれぞれ相対移動可能である。例えば、保持装置300A、300Bは、載置装置400の載置板402の縁部と同一線上(同一高さ)に並ぶように揃えることもできるし、一方の保持装置300Aを載置板402よりも前方とし、他方の保持装置300Bを載置板402よりも後方となるようにする等、その可動範囲内でそれぞれ自在に移動可能である。言い換えると、載置装置400は、保持装置300の可動範囲内に配置されている。
以下では、図5を用いて、保持装置300Bについて説明する。なお、保持装置300Aの構成は、保持装置300Bの構成と基本的に同じであるので、保持装置300Aの符号中「B」を「A」に置き換えた符号を用いて、その説明を省略する。
保持機構310Bは、被処理物Tの一部を保持する。また、移動機構320Bは、保持機構310Bを移動させる。この保持装置300Bは、後述する制御装置900と有線または無線により通信可能に接続されている。そして、この制御装置900により、保持機構310Bおよび移動機構320Bの動作が制御される。
保持機構310Bとしては、被処理物Tを積極的に把持する把持機構と、被処理物Tを単に係止するだけの係止機構とが考えられる。本実施形態の処理装置1では、保持装置300Bに、保持機構310Bとして、把持機構が使用されているので、以下の説明では、保持機構が把持機構である場合について説明する。
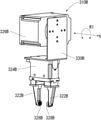
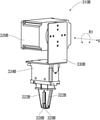
保持機構310Bは、図6および図7に示されるように、一対のフィンガ部材322Bと、リニアアクチュエータ324Bと、ロータリアクチュエータ326Bとを備えている。なお、図6では、一対のフィンガ部材322Bが互いに離間した状態が示されており、図7では、一対のフィンガ部材322Bが互いに接した状態が示されている。さらに、各フィンガ部材322Bの先端部には、それぞれ、略円板状の把持部材328Bが回転自在に取り付けられている。また、リニアアクチュエータ324Bは、断面L字状の連結板材330Bを介して、ロータリアクチュエータ326Bに接続されている。
一対のフィンガ部材322Bは、被処理物Tを把持する役割を有している。より具体的には、各フィンガ部材322Bの先端部に取り付けられた把持部材328Bが被処理物Tに直接接触して同被処理物Tを把持するようになっている。
リニアアクチュエータ324Bは、一対のフィンガ部材322Bを互いに近接または離間させる。本実施形態において、一方のフィンガ部材322Bはリニアアクチュエータ324Bに対して固定されており、他方のフィンガ部材322Bはリニアアクチュエータ324Bの動作に応じて移動する。一対のフィンガ部材322B間の最大幅(開閉ストローク)は、適宜設定可能である。
ロータリアクチュエータ326Bは、水平方向(矢印X方向)を回転軸として、連結板材330Bを介して、リニアアクチュエータ324Bを矢印R1方向に回転させる。
移動機構320Bは、図5に示されるように、幅方向移動機構332Bと、一対の上下方向移動機構334Bと、前後方向移動機構336Bとを備えている。
幅方向移動機構332Bは、保持機構310Bを幅方向(矢印X方向)に移動させる。上下方向移動機構334Bは、幅方向移動機構332Bとともに保持機構310Bを上下方向(矢印Z方向)に移動させる。また、前後方向移動機構336Bは、上下方向移動機構334B、幅方向移動機構332B、および保持機構310Bを前後方向(矢印Y方向)に移動させる。
幅方向移動機構332Bは、上述のように、保持機構310Bを幅方向(矢印X方向)に移動させるために設けられている。この幅方向移動機構332Bは、駆動力源となる幅方向移動用モータ338B、および、リニアガイド340Bを有している。
幅方向移動用モータ338Bには、リニアガイド340Bが挿入される。リニアガイド340Bは、丸棒状であり、上下方向移動機構334Bにおける左右一対の上下移動板344BR,344BLの間に架設されている。すなわち、リニアガイド340Bは、その長手方向が幅方向(矢印X方向)に沿うように配置されている。幅方向移動用モータ338Bは、通電により、リニアガイド340Bに沿ってスライド移動する。保持機構310Bのロータリアクチュエータ326Bは、幅方向移動用モータ338Bに固定されている。幅方向移動用モータ338Bがリニアガイド340Bに沿って幅方向(矢印X方向)に移動すると、幅方向移動用モータ338Bに固定された保持機構310Bも幅方向(矢印X方向)に移動する。
上下方向移動機構334Bは、上述した幅方向移動機構332Bを上下方向(矢印Z方向)に移動させる。上下方向移動機構334Bは、左右一対の上下移動板344BR,344BL、および、左右一対の昇降ユニット346BR,346BLを備えている。以下の説明では、正面視右側にある上下移動板、昇降ユニットおよびその構成要素に枝番「R」を付し、正面視で左側にある上下移動板、昇降ユニットおよびその構成要素に枝番「L」を付して区別する。なお、上下移動板344BLおよび昇降ユニット346BLの構成は、上下移動板344BRおよび昇降ユニット346BRの構成と基本的に同じであるので、上下移動板344BRおよび昇降ユニット346BRの符号中「R」を「L」に置き換えた符号を用いて、その説明を省略する。
上下移動板344BRには、上述した幅方向移動機構332Bが取り付けられる。昇降ユニット346BRには、上下移動板344BRが取り付けられる。昇降ユニット346BRは、前後方向移動機構336Bにおける、後述する枠体348BRに取り付けられている。
昇降ユニット346BRは、駆動力源となる上下方向駆動用モータ350BR、ボールネジ352BR、および、ナット354BRを有している。上下方向駆動用モータ350BRは、正転および逆転が可能なモータである。上下方向駆動用モータ350BRは、前後方向移動機構336Bの枠体348BRの下部に固定されている。ボールネジ352BRは、上下方向駆動用モータ350BRからの駆動力を受けられるようにして、鉛直方向(矢印Z方向)に沿って配置されている。ナット354BRは、ボールネジ352BRに螺合されており、ボールネジ352BRの回転に伴って上下方向(矢印Z方向)に移動する。また、ナット354BRには、上下移動板344BRが固定されている。
昇降ユニット346BRの上下方向駆動用モータ350BRが駆動すると、ボールネジ352BRが回転する。そして、ボールネジ352BRに螺合するナット354BRがボールネジ352BRの回転軸方向(矢印Z方向)に移動することにより、ナット354BRに取り付けられた上下移動板344BRがその回転軸方向(矢印Z方向)に移動する。上下方向駆動用モータ350BR,350RLが同期して動作することにより、幅方向移動機構332Bが上下方向(矢印Z方向)に沿って移動する。
前後方向移動機構336Bは、上述の上下方向移動機構334Bを前後方向(矢印Y方向)に移動させる、左右一対の機構である。前後方向移動機構336Bは、枠体348B、複数のスライドガイド356B、前後方向駆動用モータ358B、および、リニアガイド360Bを有している。枠体348Bには、上述した上下方向移動機構334Bが取り付けられている。以下の説明では、正面視右側にある前後方向移動機構336Bおよびその構成要素に枝番「R」を付し、正面視で左側にある前後方向移動機構336Bおよびその構成要素に枝番「L」を付して区別する。なお、前後方向移動機構336BLの構成は、前後方向移動機構336BRの構成と基本的に同じであるので、前後方向移動機構336BRの符号中「R」を「L」に置き換えた符号を用いて、その説明を省略する。
スライドガイド356BRは、前後方向移動機構336BRの前後移動をガイドする。1つの前後方向移動機構336BRに対して2セットのスライドガイド356BRが使用されている。スライドガイド356BRは、LMガイド362BRおよびスライダ364BRを有している。LMガイド362BRは、その長手方向が前後方向(矢印Y方向)となるように、右側面106Cの内面の内面に配置されている。スライダ364BRは、それぞれ、枠体348BRに取り付けられている。なお、LMガイド362BRは、保持装置300Aの移動機構320Aにおけるスライドガイド356ARにも使用されている。つまり、LMガイド362ARと、LMガイド362BRとは、同一部材である。
前後方向駆動用モータ358BRには、リニアガイド360BRが挿入される。1つの前後方向移動機構336BRに対して2セットの前後方向駆動用モータ358BRおよびリニアガイド360BRが使用されている。一方の前後方向駆動用モータ358BRは、枠体348BRの上端に取り付けられている。他方の前後方向駆動用モータ358BRは、枠体348BRの下端に取り付けられている。各リニアガイド360BRは、その長手方向が前後方向(矢印Y方向)となるように、右側面106Cの内面に配置されている。前後方向駆動用モータ358BRがリニアガイド360BRに沿って移動すると、枠体348BRも同じく移動する。枠体348BRが移動すると、幅方向移動機構332BRおよび保持機構310Bも同じく移動する。なお、リニアガイド360BRは、保持装置300Aの移動機構320Aにも使用されている。つまり、リニアガイド360ARと、リニアガイド360BRとは、同一部材である。
<載置装置400>
載置装置400は、図8に示されるように、認識処理や折り畳み処理の際に被処理物Tを載置する載置板402を回転および移動させる装置である。
載置装置400は、大略、載置板402と、左右一対の枠体404R,404Lと、回転機構406と、前後方向移動機構408と、被処理物センサ409とを備えている。
載置装置400は、保持装置300の動きと連動して動作する。載置装置400は、例えば、認識処理の際に、保持装置300に保持され下方向(矢印Z方向)に垂れ下がる被処理物Tを載置板402に載置する(載置板402の主面に置く又は縁部に引っ掛ける)ことで、被処理物Tの一部を水平方向に引っ張って変位させて被処理物Tを処理装置1の底面から離間させつつその上下方向(矢印Z方向)の長さを小さくする(低背化する)。これにより保持装置300にてより大きな被処理物Tを持ち上げて(すなわち被処理物Tの最下端を処理装置の底面から離して)保持することができる。または、被処理物Tを保持装置300のみで上方向に持ち上げるだけの場合に比べ、処理装置全体の高さを小さくすることができる。また例えば、載置板400は、折畳処理の際に、載置板402の縁部に処理物Tを引っ掛けることで、被処理物Tに折り線をつける。
載置板402は、略矩形の板材である載置板本体410と、回転軸412とで構成されている。回転軸412は、載置板本体410の前後方向(Y方向)中央からいずれか一方の長辺側に偏心させた状態で載置板本体410に固定されている。載置板本体410が回転軸412に対して偏心して配置されているので、回転軸412から載置板本体410の長辺までの距離が、それぞれの長辺ごとに異なる。これにより、被処理物Tを例えば、回転軸412からの距離が長い側の長辺に当接させることで、偏心していない場合に比べて、同じ傾斜角(例えば60度)であれば、より高く被処理物Tを持ち上げることができ、処理装置1内の限られたスペースをより有効に活用することができる。なお、回転軸402を偏心させずに載置板410の前後方向(Y方向)中央に配置してもよい。
また、回転軸412は、載置板本体410よりも長く形成されており、載置板本体410の両短辺からそれぞれ突出している。回転軸412の右端(矢印X1方向)は、後述する回転機構406における上側プーリ426の回転中心に接続されている。回転軸412は、その中心軸が左右方向(矢印X方向)となるように配置されている。また、左側面106Dから見て、回転軸412が反時計回りに回転することを「順方向回転」という。逆に、回転軸412が時計回りに回転することを「逆方向回転」という。
左右一対の枠体404R,404Lは、回転軸412を所定の高さで回転可能に保持するための部材である。右側の枠体404Rは、内部に空間を有する直方体状の中空部材418と、ブラケット420とを有している(図8では、便宜のため、左側(矢印X2方向)のブラケット420を外した状態を示している。)。ブラケット420は、略ひし形の板材である。ブラケット420の長軸に沿って中空部材418が取り付けられている。また、ブラケット420の短軸に沿って移動板416Rが取り付けられている。これにより、中空部材418は、移動板416Rから立設されている。また、支柱419の上端部には、回転軸412の左端(矢印X2方向)を回動可能に保持する軸受け421が設けられている。
回転機構406は、載置板402を回転させる機構である。この回転機構406は、大略、回転用モータ422と、下側プーリ424と、上側プーリ426と、ベルト428とを有している。
回転用モータ422は載置板402を回転させる駆動力を発生させる。回転用モータ422は、移動板416Rに固定されている。また、回転用モータ422の出力軸端には、回転盤430が取り付けられている。
下側プーリ424は、回転用モータ422からの駆動力を受ける。下側プーリ424は、略「コ」字状の下側プーリ保持部材432によって回転可能に保持されている。回転用モータ422の出力軸と下側プーリ424の回転軸とは互いに直交する向きに設定されている。回転用モータ422および下側プーリ424は、回転盤430の外縁が下側プーリ424の周縁表面と接するように位置決めされている。これにより、回転用モータ422からの駆動力が、90°ずらして下側プーリ424に伝達される。
上側プーリ426の中心には、上述のように、載置板402の回転軸412の先端が取り付けられている。また、上側プーリ426と下側プーリ424との間にはベルト428が架け渡されている。これにより、回転用モータ422から受けた駆動力が、下側プーリ424からベルト428を介して上側プーリ426に伝達される。駆動力を受けた上側プーリ426は回転する。上側プーリ426が回転することにより、載置板402も回転する。
前後方向移動機構408は、左右一対の移動板416R,416Lと、左右一対の枠体404R,404Lを互いに連結する連結部材434と、前後方向駆動用モータ436と、リニアガイド438とを有している。また、前後方向移動機構408は、受入搬送装置200における搬送コンベヤ204の下方に配置されている。
連結部材434は、搬送コンベヤ204の下側で両枠体404R,404Lの下端を互いに連結する。つまり、連結部材434は、幅方向(矢印X方向)に延びる部材である。
前後方向駆動用モータ436には、リニアガイド438が挿入される。この前後方向駆動用モータ436は、ブラケット440を介して、上述した連結部材434の下側に取り付けられている。リニアガイド438は、その長手方向が前後方向(矢印Y方向)となるように配置されている。また、前後方向駆動用モータ436は、連結部材434の中央部下側に取り付けられている。
前後方向駆動用モータ436がリニアガイド438に沿って移動すると、連結部材434も同じ方向に移動する。連結部材434が移動すると、枠体404R,404Lや載置板402も同じ方向に移動する。
被処理物センサ409は、移動板416Rの表面において、移動板416Lに向けて取り付けられている。つまり、被処理物センサ409は、搬送コンベヤ204におけるコンベヤベルト242に対して略直交する向きに取り付けられている。このように、被処理物センサ409は、移動板416Rに取り付けられているので、前後方向移動機構408によって載置装置400が前後方向に移動すると、被処理物センサ409も同時に前後方向に移動する。
被処理物センサ409は障害物検知センサであり、当該被処理物センサ409の正面に障害物(例えば、被処理物T)が来たとき、それを検知して障害物検知信号を発信する。本実施例において、被処理物センサ409から発信された障害物検知信号は、信号線を介して制御装置900に送られる。
<撮像装置500>
撮像装置500は、被処理物Tを受け入れ搬送処理、認識処理および折り畳み処理する際に、当該被処理物Tの端点等を検出するための装置であり、少なくとも、保持装置300や載置装置400の移動範囲全域を撮像可能になっている。撮像装置500は、図1に示されるように、第1の撮像部502と、第2の撮像部504と備えている。各撮像部502,504としてデジタルスチルカメラが使用されている。
なお、第1の撮像部502と、第2の撮像部504のデジタルスチルカメラのレンズとして、広角レンズや可変焦点レンズを使用してもよい。この場合、各撮像部502、504の視野が広がるので、一つの撮像部でより大きな被処理物Tを撮像できる。またレンズとしてズームレンズを用いて被処理物Tを高倍率で撮像するようにしてもよい。この場合、撮像部502、504によって、被処理物Tの織り目から被処理物Tの材質を検知してもよい。被処理物Tの材質を把握できればその材質に適した把持や折り畳み等も可能になる。
本実施形態においては、撮像装置500の撮像範囲は、少なくとも障害部材222を含む処理装置1の下方まで含み、障害部材222の直上の第1点Pを検出可能である(図17(f)参照)。デジタルスチルカメラのイメージセンサとしては、例えば、モノクロ又はカラーのCCDを用いることができる。カラーのCCDを用いた場合は、被処理物Tの認識工程において、被処理物Tの「色」を認識の判断ための一要素として用いることができる。
第1の撮像部502は、処理装置1の奥(矢印Y1方向)の内壁面において、扉本体210の内側に向けて取り付けられている。第1の撮像部502は、被処理物Tが展開された場合、被処理物Tの正面に位置するようになっている。また、第2の撮像部504は、処理装置1の一方の側面(矢印X1方向)の内壁面において、他方の側面(矢印X2方向)に向けて取り付けられている。第2の撮像部504は、被処理物Tが展開された場合、被処理物Tの側面に位置するようになっている。つまり、第1の撮像部502による撮像方向と、第2の撮像部504による撮像方向とは互いに略直交し、これにより被処理物Tを三角法により3次元的に認識できるので、保持機構310A、310Bはより正確に被処理物Tを保持できる(なお、第2の撮像部504を設けなくても第1の撮像部502のみでも被処理物Tを所定距離移動させることで三角法により被処理物Tを3次元的に認識できるので、第2撮像部504はこの意味で必須ではない。もっとも、撮像部を複数備えていたほうが処理の迅速化、正確化等の観点からは好ましい)。
第1の撮像部502と第2の撮像部504の高さ位置(Z方向)は、互いに異なっていてもよい。この場合、処理装置1内の構造物(例えば、保持装置300A、300B)の移動等によって、第1の撮像部502と第2の撮像部504の双方が同時に死角に入ることが抑制できる。また第1の撮像部502及び第2の撮像部504のうち高い位置に配置される方は、カメラのレンズを下側に向けて下方に視野角を広げるようにしてもよい。このように、第1の撮像部502と第2の撮像部504は、双方の撮像部が同時に死角に入らないように、処理装置1内の構造物及びその移動の軌跡等を考慮して設置されることが好ましい。
また、第1の撮像部502及び第2の撮像部504の双方のカメラのレンズを下方に向けても良い。この場合、処理装置1の筐体内で舞うホコリ等がレンズに付着し、積層することを抑制できる。
<挟持装置700>
挟持装置700は、載置装置400の載置板402に載置された状態で運ばれてきた被処理物Tを挟持して、当該被処理物Tを載置装置400から受け取る装置である。挟持装置700は、図2および図4に示されるように、大略、上側挟持板702と、下側挟持板704と、上側挟持板回動軸706と、下側挟持板回動軸708と、上側軸受け710と、下側軸受け712と、挟持板回動用モータ714と、駆動力伝達手段716とを備えている。
上側挟持板702は、矩形の板材であり、長手方向が幅方向(矢印X方向)となるように配置されている。上側挟持板702の下側縁部には、上側挟持板回動軸706が取り付けられている。上側挟持板回動軸706は、その回転軸が幅方向(矢印X方向)となるように配置される。上側挟持板回動軸706の両端部には、一対の上側軸受け710が取りけられている。これら上側軸受け710は、扉本体210が設けられた、処理装置1の正面106Aの内側に取り付けられている。
下側挟持板704は、上述した上側挟持板702よりも面積の大きい矩形の板材である。また、下側挟持板704は、長手方向が幅方向(矢印X方向)となるように配置されている。また、下側挟持板704は、上側挟持板702の直下に配置されている。下側挟持板704の上側縁部には、下側挟持板回動軸708が取り付けられている。下側挟持板回動軸708は、その回転軸が幅方向(矢印X方向)となるように配置されている。下側挟持板回動軸708の両端部には、一対の下側軸受け712が取り付けられている。これら下側軸受け712は、正面106Aに取り付けられている。また、下側挟持板回動軸708は、その回動軸が幅方向(矢印X方向)となり、かつ、上側挟持板回動軸706に対して平行となるように配置される。さらに、下側挟持板704には、下側挟持板回動軸708が取り付けられた一方の長辺側から、他方の長辺縁に至る複数の直線状のスリット730が形成されている。これらスリット730の幅は、搬送装置800の支持部材808の幅よりもやや広く形成されており、後述のように、支持部材808がスリット730に嵌挿可能になっている。
挟持板回動用モータ714は、正転および逆転が可能なモータであり、上側挟持板702および下側挟持板704を回動させる駆動力を発生させる。挟持板回動用モータ714も、軸受け710,712と同様、正面106Aの内側に取り付けられている。
駆動力伝達手段716は、駆動側プーリ718と、従動側プーリ720と、ベルト722と、連動手段724とを有している。
駆動側プーリ718は、挟持板回動用モータ714の出力軸端に取り付けられている。従動側プーリ720は、下側挟持板回動軸708における、挟持板回動用モータ714に近い方の端に取り付けられている。ベルト722は、駆動側プーリ718と従動側プーリ720との間に掛け渡されている。
連動手段724は、上側挟持板回動軸706に取り付けられた第1ギア726と、下側挟持板回動軸708に取り付けられた第2ギア728とで構成されている。
これにより、挟持板回動用モータ714の駆動力は、駆動側プーリ718、ベルト722、および、従動側プーリ720を介して下側挟持板回動軸708に伝達される。駆動力が伝達された下側挟持板回動軸708は所定の方向に回動する。また、下側挟持板回動軸708に伝達された駆動力は、連動手段724を介して、上側挟持板回動軸706にも伝達される。連動手段724としてギア726,728を使用しているので、上側挟持板回動軸706の回動方向と下側挟持板回動軸708の回動方向とは互いに逆になる。例えば、上側挟持板回動軸706が時計回りに回動する場合、下側挟持板回動軸708は反時計回りに回動する。これにより、上側挟持板702と下側挟持板704とを互いに近接離間させることができ、挟持装置700として挟持・開放動作を行うことができる。
<搬送装置800>
搬送装置800は、処理後の被処理物Tを挟持装置700から受け取って搬送する。搬送装置800は、上記受入搬送装置200から挟持装置700までのうち、少なくとも1つの装置で構成される被処理物処理装置の下流側に配設されており、被処理物処理装置と搬送装置800とを合わせて、被処理物処理システムが構成される。この搬送装置800は、図9(a)に示されるように、大略、支持具802と、支持具回動機構(回動機構)804と、支持具上下移動機構806とを備えている。なお、図9では、便宜のため、挟持装置700の下側挟持板704が取り外された状態が示されている。
支持具802は、挟持装置700から受け取った被処理物Tを支持する。この支持具802は、複数(本実施形態では4本)の支持部材808と、支持具用軸810とを有する。各支持部材808の一端は、各支持部材808が互いに離間して一列に並ぶように、支持具用軸810の側周に取り付けられている。また、各支持部材808は、支持具用軸810の長手方向と直交する向きに取り付けられている。これにより、櫛歯状の支持具802が形成されている。
各支持部材808は、図9(b)に示されるように、受け部832と曲がり部834とで構成されている。受け部832は、一端が支持具用軸810に取り付けられた直線状部である。また、曲がり部834は、受け部832の他端から斜め上方に延びる弧状部(弧状に限らず、斜め上方に延びる形状であればよい。)である。
支持具回転機構804は、フレーム812と、回動用モータ814とを有している。フレーム812は、扉本体210が設けられた、処理装置1における正面106A(矢印Y2方向の壁面)の内側であって、挟持装置700における下側挟持板回動軸708の下方に取り付けられている。また、フレーム812は、幅方向(矢印X方向)に延びる長尺部材であり、支持具用軸810を回動可能に保持する。
回動用モータ814は、正転および逆転が可能なモータであり、支持具用軸810を回動させる駆動力を発生させる。この回動用モータ814は、フレーム812の右方(矢印X1方向)端に固定されている。回動用モータ814の出力軸は、支持具用軸810の右方(矢印X1方向)端に接続されている。これにより、回動用モータ814の駆動力で、支持具用軸810を回動させることができる。支持具用軸810により、支持部材808を、下方に垂れ下がった位置や略水平となる位置など、所望の位置にすることができる。
支持具上下移動機構806は、支持具回転機構804および支持具802を上下移動させる機構である。この支持具上下移動機構806は、大略、一対のボールネジ816と、一対のナット817と、上下動用モータ818と、駆動力伝達手段820とを有している。
一対のボールネジ816は、正面106Aの内側に取り付けられている。また、これらボールネジ816は、フレーム812の水平方向長さよりもやや狭い間隔をあけて上下方向(矢印Z方向)に配置されている。各ボールネジ816には、それぞれナット817が螺合されている。これらナット817は、それぞれ、フレーム812の端部に取り付けられている。
上下動用モータ818は、正転および逆転が可能なモータであり、支持具回転機構804および支持具802を上下動させる駆動力を発生させる。この上下動用モータ818は、正面106Aの内側に取り付けられている。また、上下動用モータ818の取り付け高さは、支持具802が移動可能な最下端付近に設定されている。
駆動力伝達手段820は、上下動用モータ818からの駆動力を一対のボールネジ816に伝達する。この駆動力伝達手段820は、駆動側プーリ822と、従動側プーリ824と、一対の連動プーリ826と、駆動用ベルト828と、連動用ベルト830とを有している。
駆動側プーリ822は、上下動用モータ818の出力軸端に取り付けられている。従動側プーリ824は、上下動用モータ818に近いボールネジ816の下端に取り付けられている。一対の連動プーリ826は、一対のボールネジ816の上端にそれぞれ取り付けられている。駆動用ベルト828は、駆動側プーリ822と従動側プーリ824との間に架け渡されている。連動用ベルト830は、一対の連動プーリ826の間に架け渡されている。
これにより、上下動用モータ818の駆動力は、駆動側プーリ822および駆動用ベルト828を介して上下動用モータ818に近いボールネジ816に伝達される。駆動力が伝達されたボールネジ816は、所定の方向に回転する。この回転力は、一対の連動プーリ826および連動用ベルト830を介して別のボールネジ816に伝達される。この結果、一対のボールネジ816は、上下動用モータ818の駆動力を受けて、同じ方向に同じ回転速度で回転する。これにより、一対のナット817が同じ速度で上下に動くので、フレーム812が水平状態を保ちつつ上下に動く。フレーム812が上下に動くことで、支持具802および支持具回動機構804も上下に動く。
<制御装置900>
制御装置900は、処理装置1における各部の制御を統括する。制御装置900は、主として、ROM、CPU、RAM、および、入出力インターフェイスから構成されている。ROMには、オペレーティングシステム、処理装置1の各部を制御するための制御プログラム、および、制御プログラムの実行に必要なデータが格納されている。また、CPUは、ROMに格納されている制御プログラムをRAMにロードしたり、ROMから直接実行したりするために設けられている。つまり、CPUが、制御プログラムを実行することにより、処理装置1の制御を行うことが可能となる。そして、CPUが処理したデータは、入出力インターフェイスを介して、処理装置1の各部(受入搬送装置200、保持装置300A,300B等)へと送信され、CPUの処理に必要なデータは、処理装置1の各部(撮像装置500等)から入出力インターフェイスを介して受信される。
この制御装置900は、図10の機能ブロック図に示されるように、大略、受入搬送装置制御部902、保持装置制御部904、載置装置制御部906、撮像装置制御部908、挟持装置制御部910、搬送装置制御部912、種類認識部914、長さ検出部915、垂れ長さ検出部916、第1点検出部920、第1端点検出部922、第2端点検出部924、第3端点検出部926、第4端点検出部928、第5端点検出部930、第6端点検出部932、第7端点検出部934、および、第8端点検出部936を備えている。
<受入搬送装置制御部902>
受入搬送装置制御部902は、受入搬送装置200の動作を制御する。すなわち、受入搬送装置制御部902は、扉202、および、搬送コンベヤ204の動作を制御する。
受入搬送装置制御部902が扉202の動作を制御することにより、扉本体210が開閉される。これにより、ユーザが被処理物Tを処理装置1に投入したり、処理された被処理物Tを処理装置1から取り出したりできる。また、受入搬送装置制御部902が搬送コンベヤ204の動作を制御することにより、搬送コンベヤ204を順方向回転、あるいは、逆方向回転させることができる。
<保持装置制御部904>
保持装置制御部904は、保持装置300A,300Bにおける保持機構310A,310Bおよび移動機構320A,320Bの動作を制御する。
保持装置制御部904が保持機構310A,310Bにおけるリニアアクチュエータ324A,324Bの動作を制御することにより、一対のフィンガ部材322A,322Bを互いに近接または離間させ、各フィンガ部材322A,322Bに取り付けられた把持部材328A,328Bで被処理物Tの把持またはその解除を行う。
また、保持装置制御部904が保持機構310A,310Bにおけるロータリアクチュエータ326A,326Bの動作を制御することにより、連結板材330A,330Bを介して、リニアアクチュエータ324A,324Bがロータリアクチュエータ326A,326Bの回転軸を中心に回転する。
また、保持装置制御部904が移動機構320A,320Bにおける幅方向移動機構332A,332Bの動作を制御することにより、保持機構310A,310Bが幅方向(矢印X方向)に移動する。
また、保持装置制御部904が移動機構320A,320Bにおける上下方向移動機構334A,334Bの動作を制御することにより、保持機構310A,310Bが上下方向(矢印Z方向)に移動する。
また、保持装置制御部904が移動機構320A,320Bにおける前後方向移動機構336A,336Bの動作を制御することにより、保持機構310A,310Bが前後方向(矢印Y方向)に移動する。
<載置装置制御部906>
載置装置制御部906は、載置装置400における回転機構406および前後方向移動機構408の動作を制御する。
載置装置制御部906が回転機構406の動作を制御することにより、載置板402が回転するとともに所定の角度を保持する。
載置装置制御部906が前後方向移動機構408の動作を制御することにより、載置板402が前後方向(矢印Y方向)に移動する。
<撮像装置制御部908>
撮像装置制御部908は、撮像装置500における第1の撮像部502および第2の撮像部504の動作を制御する。第1の撮像部502および第2の撮像部504を制御することにより、所望のタイミングでデジタル画像を取得できる。
<挟持装置制御部910>
挟持装置制御部910は、挟持装置700における挟持板回動用モータ714の動作を制御する。挟持装置制御部910が挟持板回動用モータ714を正転させることにより、上側挟持板702と下側挟持板704とが互いに近接する(すなわち、挟持装置700が閉じる)方向へ回動する。逆に、挟持板回動用モータ714を逆転させることにより、上側挟持板702と下側挟持板704とが互いに離間する(すなわち、挟持装置700が開く)方向へ回動する。これにより、挟持装置700の開閉状態を制御できる。
<搬送装置制御部912>
搬送装置制御部912は、搬送装置800における支持具回動機構804および支持具上下移動機構806の動作を制御する。
搬送装置制御部912が搬送装置800の支持具回動機構804を制御することにより、支持具802の回動角度が変化したり、所定の角度を維持したりする。
搬送装置制御部912が搬送装置800の支持具上下移動機構806を制御することにより、支持具802が上下方向(矢印Z方向)に移動する。
<種類認識部914>
種類認識部914は、撮像装置500における第1の撮像部502および第2の撮像部504で得られた画像データに基づいて被処理物Tの種類を認識する。この種類識別について説明すると、種類認識部914は、予め、Tシャツ、ランニングシャツ、スカート、タオル、ハンカチ、フィルム、紙、あるいは、シートといった多種多様な被処理物Tの画像データ(学習用画像データ)から抽出された特徴量に基づき、Randmaiz forest識別器を用いて学習する。Randmaiz forestとは、複数の決定木を用いて森を構成して識別等を行う機械学習アルゴリズムである。また、ここでいう「特徴量」とは、被処理物Tの外形状(例えば、「襟部」の有無)にとどまらず、被処理物Tにおける外観上の全ての要素が対象となる。例えば、被処理物TがTシャツである場合、そのTシャツにプリントされたキャラクターの図柄も「特徴量」を算出するための要素となる。なお、学習用画像データは、カメラ機能を備えるタブレットPCやデータ送信機能を有するデジタルカメラ等を介して、ユーザが追加していくこともできる。
学習用画像データから特徴量を算出する手法としては、「画素値」を利用するもの、「HoG(Histogram oriented Gradients)特徴量」を利用するもの、あるいは、「Haar-like特徴量」といった、人の顔を認識するために用いられている既存技術を応用することが考えられる。
種類認識部914は、第1の撮像部502および第2の撮像部504で得られた画像データに写された、現在処理中の被処理物Tの特徴量を上述した手法を用いて算出する。そして、種類認識部914は、算出した特徴量毎にRandmaiz forest識別器を用いて当該被処理物Tがある種類(例えば、Tシャツ、ランニングシャツ、スカート、タオル等)に該当する確率を種類毎にパーセンテージで計算する。然る後、最も確率の高い(すなわち、パーセンテージの高い)ものを当該被処理物Tの種類として認識する。
また、種類認識部914では、被処理物Tの種類毎に折り畳み方が予め決められており、各種類の折り畳み方が「折り畳み情報」として蓄積されている。この「折り畳み情報」には、ある種類の被処理物Tを折り畳む際に、どの位置で折り畳むのかについての情報が記載されている。例えば、被処理物TがTシャツであり、このTシャツを着丈方向で2つ折りし、幅方向で3つ折りにする場合、図11に示されるように、Tシャツの「折り畳み情報」には、着丈方向で2つ折りするために必要な「横折り線B1の位置情報」、および、幅方向で3つ折りするために必要な「第1折り線B2の位置情報」と「第2折り線B3の位置情報」とが含まれる。なお、「横折り線B1」については、具体的な「位置情報」ではなく、「着丈全体の長さの半分の位置」といったように、着丈全体の長さに対する割合で決定するようにしてもよい。また、Tシャツにおける、第1折り線B2よりも端側を第1端部分D1といい、反対に、第2折り線B3よりも端側を第2端部分D3といい、第1端部分D1と第2端部分D3とで挟まれた中央部を中央部分D2という。
<長さ検出部915>
長さ検出部915は、撮像装置500における第1の撮像部502および第2の撮像部504で得られた画像データに基づいて、被処理物Tの縦方向の長さ(被処理物TがTシャツであれば、当該Tシャツの着丈寸法)および横方向の長さ(被処理物TがTシャツであれば、当該Tシャツの幅寸法)を得る。
<垂れ長さ検出部916>
垂れ長さ検出部916は、撮像装置500における第1の撮像部502および第2の撮像部504で得られた画像データに基づいて、載置板402における縁線(第1縁線)から垂れ下げられた被処理物Tの下端を検出し、第1縁線から当該下端までの垂れ長さを得る。
<第1点検出部920>
第1点検出部920は、受入搬送装置200における搬送コンベヤ204の上面に載置された被処理物Tで最も高い位置にある第1点Pを検出する。具体的には、第1点検出部920は、第1の撮像部502および第2の撮像部504からの画像データに基づき、受入搬送装置200における障害部材222の直上又は障害部材222の近傍において、搬送コンベヤ204の上面から所定以上の高さにある被処理物Tの一部(複数ある場合は、例えば搬送コンベヤ204の上面から最も高い部分)を第1点Pとして検出する(図17(f)参照)。
<第1端点検出部922>
第1端点検出部922は、保持機構310Aが第1点Pで保持する被処理物Tにおける、当該第1点Pから最も離れた第1端点P1を検出する。具体的には、第1端点検出部922は、保持機構310Aが第1点Pで保持して吊り上げた被処理物Tにおける最下点(最も低い位置にある点)を第1の撮像部502および第2の撮像部504からの画像データに基づいて検出し、当該最下点を第1端点P1とする(図18(h)参照)。
<第2端点検出部924>
第2端点検出部924は、第1点Pと第1端点P1とを結ぶ直線L1から最も離れた第2端点P2を検出する。具体的には、第2端点検出部924は、保持機構310A,310Bが第1点Pおよび第1端点P1の両方を互いに同じ高さで保持した状態の被処理物Tにおける最下点を第1の撮像部502および第2の撮像部504からの画像データに基づいて検出し、当該最下点を第2端点P2とする(図18(i)参照)。
<第3端点検出部926>
第3端点検出部926は、被処理物Tの隅部である第3端点P3を検出する。具体的には、第3端点検出部926は、載置板402から垂れ下げた状態における被処理物Tの下方隅部を第1の撮像部502および第2の撮像部504からの画像データに基づいて検出し、当該隅部を第3端点P3とする(図19(l)参照)。
<第4端点検出部928>
第4端点検出部928は、第3端点P3に対向する被処理物Tの隅部を第4端点P4として検出する。具体的には、第4端点検出部928は、第3端点P3に該当する被処理物Tの隅部に対向する隅部を第1の撮像部502および第2の撮像部504からの画像データに基づいて検出し、当該隅部を第4端点P4とする(図19(l)参照)。
<第5端点検出部930>
第5端点検出部930は、被処理物Tをその長手方向に直交する方向(横方向)に2つ折りにする際の横折り線B1の一方端を第5端点P5として検出する。具体的には、第5端点検出部930は、水平状態から所定の角度をつけた状態の載置板402における上側の縁線(第1縁線C1)に被処理物Tの横折り線B1が沿うようにして被処理物Tを載置板402に垂れ下げた状態で、被処理物Tの上方隅部を第1の撮像部502および第2の撮像部504からの画像データに基づいて検出し、当該隅部を第5端点P5とする(図21(p)参照)。
<第6端点検出部932>
第6端点検出部932は、被処理物Tをその長手方向に直交する方向(横方向)に2つ折りにする際の横折り線B1の他方端を第6端点P6として検出する。具体的には、第5端点検出部930によって第5端点P5を検出する際、第6端点検出部932は、第5端点P5に該当する被処理物Tの隅部に対向する隅部を第1の撮像部502および第2の撮像部504からの画像データに基づいて検出し、当該隅部を第6端点P6とする(図21(p)参照)。
<第7端点検出部934>
第7端点検出部934は、被処理物Tをその長手方向(縦方向)に折る際の第1折り線B2の一方端を第7端点P7として検出する。具体的には、第7端点検出部934は、水平状態から所定の角度をつけた状態の載置板402における上側の縁線(第1縁線C1)に被処理物Tの第1折り線B2が沿うようにして被処理物Tを載置板402に垂れ下げた状態で、被処理物Tの上方隅部を第1の撮像部502および第2の撮像部504からの画像データに基づいて検出し、当該隅部を第7端点P7とする(図22(s)参照)。
<第8端点検出部936>
第8端点検出部936は、被処理物Tをその長手方向(縦方向)に折る際の第1折り線B2の他方端を第8端点P8として検出する。具体的には、第7端点検出部934によって第7端点P7を検出する際、第8端点検出部936は、第7端点P7に該当する被処理物Tの隅部に対向する隅部を第1の撮像部502および第2の撮像部504からの画像データに基づいて検出し、当該隅部を第8端点P8とする(図22(s)参照)。
<受入搬送装置制御部902による制御>
受入搬送装置制御部902は、乱雑な状態の被処理物Tを処理装置1内に受け入れ、然る後、保持装置300Aによって被処理物Tを吊り上げ易い状態にするために、以下に説明する第1の制御から第5の制御を行うように、扉202、および、搬送コンベヤ204の動作を制御する。
受入搬送装置制御部902は、扉本体210が開状態となるように扉開閉モータ216を制御する(第1の制御)。
また、受入搬送装置制御部902は、第1の制御の後、搬送コンベヤ204が順方向回転するようにコンベヤ駆動モータ244を制御する(第2の制御)。
ユーザによって処理装置1内に乱雑な状態の被処理物Tが投入された後、受入搬送装置制御部902は、扉本体210が閉状態となるように扉開閉モータ216を制御する(第3の制御)。なお、扉本体210が閉状態となったときにおける障害部材222の位置に被処理物センサ409が位置するように、予め、載置装置400における前後方向移動機構408が位置決めされている。
さらに、受入搬送装置制御部902は、第3の制御の後、搬送コンベヤ204が逆方向回転するようにコンベヤ駆動モータ244を制御する(第4の制御)。
また、受入搬送装置制御部902は、第4の制御の後、障害部材222に被処理物Tが乗り上がったことを認識したとき、つまり、制御装置900が被処理物センサ409からの障害物検知信号を受け取ったとき、搬送コンベヤ204が停止するようにコンベヤ駆動モータ244を制御する(第5の制御)。
<保持装置制御部904および載置装置制御部906を協働させた制御>
保持装置制御部904および載置装置制御部906は、搬送コンベヤ204上の被処理物Tを吊り上げた後、当該被処理物Tを識別し、さらに、被処理物Tを折り畳むために、以下に説明する第6の制御から第21の制御を行う。
保持装置制御部904は、一方の保持機構310Aが、搬送コンベヤ204上の被処理物Tを第1点Pで保持した後、被処理物Tを吊り上げるように保持装置300Aを制御する(第6の制御)。
保持装置制御部904は、第6の制御の後、他方の保持機構310Bが被処理物Tの第1端点を保持するように保持装置300Bを制御する(第7の制御)。
保持装置制御部904は、第7の制御の後、一方の保持機構310Aが第1点Pを保持したまま右方向(矢印X1方向)へ水平移動するとともに、他方の保持機構310Bが第1端点P1を第1点Pと同じ高さまで吊り上げるように保持装置300Bを制御する(第8の制御)。
保持装置制御部904は、第8の制御の後、他方の保持機構310Bが第1端点P1を開放し、然る後、第2端点P2を保持するように保持装置300Bを制御する(第9の制御)。
保持装置制御部904および載置装置制御部906は、第9の制御の後、他方の保持機構310Bが第2端点P2を第1点Pと同じ高さまで吊り上げるとともに、載置板402が順方向回転するように保持装置300Bおよび載置装置400を制御する(第10の制御)。
保持装置制御部904は、第10の制御の後、一方の保持機構310Aおよび他方の保持機構310Bが、被処理物Tの横折り線B1を載置板402の上側の縁線(第1縁線C1)に沿わせて当該被処理物Tを載置板402に掛け、然る後、一方の保持機構310Aが第1点Pを解放し、他方の保持機構310Bが第2端点P2を解放するように保持装置300A,300Bを制御する(第11の制御)。
保持装置制御部904は、第11の制御の後、一方の保持機構310Aが第3端点P3を保持するように保持装置300Aを制御する(第12の制御)。
保持装置制御部904は、第12の制御の後、一方の保持機構310Aが第3端点P3を第4端点P4の真上に移動させるように保持装置300Aを制御する(第13の制御)。
保持装置制御部904は、第13の制御の後、他方の保持機構310Bが第4端点P4を保持するように保持装置300Bを制御する(第14の制御)。
保持装置制御部904および載置装置制御部906は、第14の制御の後、他方の保持機構310Bが第4端点P4を第3端点P3よりも右側(矢印X1方向)で、かつ、第3端点と同じ高さまで吊り上げた後、載置板402を順方向回転(左側面102Dから見て回転軸412が反時計回りに回転すること)させて被処理物Tの裏表を逆転させ、然る後、被処理物Tの横折り線B1を載置板402の上側の縁線(第1縁線C1)に沿わせて、当該被処理物Tを載置板402に掛けるように保持装置300Bおよび載置装置400を制御する(第15の制御)。
保持装置制御部904および載置装置制御部906は、第15の制御の後、載置板402を鉛直に保持し、一方の保持機構310Aが第5端点を保持するとともに、他方の保持機構310Bが第6端点を保持するように保持装置300A,300Bおよび載置装置400を制御する(第16の制御)。
保持装置制御部904および載置装置制御部906は、第16の制御の後、両保持機構310A,310Bで第5端点P5および第6端点P6を保持しつつ被処理物Tを載置板402よりも高く吊り上げた後、載置板402を水平に保持する。然る後、一方の保持機構310Aおよび他方の保持機構310Bで、第5端点P5および第6端点P6が載置板402よりも外側で前後方向に並ぶようにする。そして、一方の保持機構310Aおよび他方の保持機構310Bが被処理物Tの下端部を載置板402の上面に載置するように保持装置300A,300Bおよび載置装置400を制御する(第17の制御)。
保持装置制御部904は、第17の制御の後、一方の保持機構310Aおよび他方の保持機構310Bが第5端点P5および第6端点P6を開放する(第18の制御)。
載置装置制御部906は、第18の制御の後、載置板402が逆方向回転(左側面102Dから見て回転軸412が時計回りに回転すること)して鉛直向きになるように載置装置400を制御する(第19の制御)。
保持装置制御部904および載置装置制御部906は、第19の制御の後、一方の保持機構310Aで第7端点P7を保持するとともに他方の保持機構310Bで第8端点P8を保持して被処理物Tを吊り上げた後、載置板402が水平となるように保持装置300A,300Bおよび載置装置400を制御する(第20の制御)。
保持装置制御部904は、第20の制御の後、両方の保持機構310A,310Bで第7端点P7および第8端点P8を保持しつつ、水平な載置板402に被処理物Tを載置するように保持装置300A,300Bを制御する(第21の制御)。
<載置装置制御部906および挟持装置制御部910を協働させた制御>
載置装置制御部906および挟持装置制御部910は、被処理物Tを折り畳み、さらに、折り畳んだ被処理物Tを折り畳んだ状態で保持するために、以下に説明する第22の制御から第23の制御を行う。
載置装置制御部906および挟持装置制御部910は、第21の制御の後、被処理物Tが載置された載置板402を挟持装置700に接近させつつ、接近してきた被処理物Tを載置板402とともに上側挟持板702と下側挟持板704とで挟持するように載置装置400および挟持装置700を制御する(第22の制御)。
載置装置制御部906は、第22の制御の後、載置板402が挟持装置700から離間するように載置装置400を制御する(第23の制御)。
<挟持装置制御部910および搬送装置制御部912を協働させた制御>
挟持装置制御部910および搬送装置制御部912は、折り畳んだ被処理物Tの型崩れを防止しつつ、被処理物受け部材220内に収納するために、以下に説明する第24の制御から第26の制御を行う。
挟持装置制御部910および搬送装置制御部912は、第23の制御の後、支持具802を上限まで上昇させるとともに支持部材808が水平状態になるまで支持具用軸810を回動させ、然る後、被処理物Tを解放するように搬送装置800および挟持装置700を制御する(第24の制御)。
搬送装置制御部912は、第24の制御の後、支持部材808の水平状態を保ちつつ、支持具802が降下するように搬送装置800を制御する(第25の制御)。
挟持装置制御部910および搬送装置制御部912は、第25の制御の後、支持具802の降下を停止し、然る後、支持部材808が鉛直下向きに回動するように搬送装置800を制御する(第26の制御)。
<処理装置1によるTシャツの処理動作>
次に、図12~図15のフローチャートおよび図16~図24を参照して、処理装置1による被処理物Tの一例であるTシャツTの処理動作について説明する。
<受入搬送工程(図12)>
まず、図16(a)に示されるように、処理装置1によるTシャツTの処理動作をスタートさせると、扉本体210が開く(第1の制御、ステップS1)。そして、図16(b)に示されるように、搬送コンベヤ204が順方向(TシャツTが扉本体210から離間する方向)回転する(第2の制御、ステップS2)。この状態で、洗濯および乾燥された乱雑な状態のTシャツTが処理装置1内に投入される。なお、扉本体210が開いた状態では、図25に示されるように、扉本体210は扉用軸212を中心として回動している。また、扉本体210に取り付けられている被処理物受け部材220および障害部材222も同様に扉用軸212を中心として回動している。つまり、被処理物受け部材220および障害部材222は、搬送コンベヤ204の上面から離間した状態になっている。
そして、投入されたTシャツTが順方向(TシャツTが扉本体210から離間する方向)回転する搬送コンベヤ204によって搬送され、扉本体210を閉じたときに障害部材222が配設される位置よりも奥側(TシャツTが扉本体210から離間する側)までTシャツTが搬送された後、図16(c)に示されるように、扉本体210が閉じられる(第3の制御、ステップS3)。なお、障害部材222が配設される位置よりも奥側までTシャツTが搬送されたことは、搬送装置400における前後方向移動機構408の移動板416Rに取り付けられた被処理物センサ409を用いて確認される。また、被処理物センサ409は、移動板416Rに取り付けられており前後に移動可能であることから、被処理物センサ409の前後位置を調節することにより、被処理物Tのボリュームを推定することができる。さらに、これに代えて、搬送コンベヤ204が、所定時間、順方向回転を続けたことをもって、Tシャツが奥側まで搬送されたものと判断してもよい(タイマーによる制御)。扉本体210が閉じられることにより、障害部材222は、搬送コンベヤ204の直上(表面近傍)に配設される。
次に、図17(d)に示されるように、搬送コンベヤ204が逆方向(TシャツTが扉本体210に近づく方向)回転する(第4の制御、ステップS4)。これにより、TシャツTが障害部材222の凹面に向けて移動する。すると、搬送コンベヤ204によって移動するTシャツTが障害部材222に乗り上がる(TシャツTが障害部材222に乗り上がったことは、例えば、障害部材222の上方に向けて配置された被処理物センサ409や、撮像装置500を用いて検出することができる。)。TシャツTが障害部材222に乗り上がると、第1点検出部920が障害部材222の直上におけるTシャツTの一部を第1点Pとして検出する(第1点検出工程、ステップS5)。第1点Pが検出されると、図17(e)に示されるように、搬送コンベヤ204が停止する(第5の制御、ステップS6)。なお、搬送コンベヤ204は、TシャツTが障害部材222の頂部を超えたと検出したら即座に停止するようにしてもよい。このようにすることで、TシャツTが障害部材222の頂部から斜め上方に伸びる状態になりやすいので、TシャツTが障害部材を完全に乗り越えた後に比べて、保持機構310A、310Bで第1点Pをより保持しやすくなる。
次に、図17(f)に示されるように、一方の保持機構310Aが検出された第1点Pを保持する。具体的に説明すると、一方の保持機構310Aに設けられたリニアアクチュエータ324が動くことにより、一対のフィンガ部材322Aが互いに近接する(このとき、フィンガ部材322Aは、ロータリアクチュエータ326Aによって略水平に保持されている。)。一対のフィンガ部材322Aが互いに近接すると、両フィンガ部材322Aの先端部に取り付けられた把持部材328A同士が近接し、TシャツTの第1点Pを保持(把持)する。一方の保持機構310Aが第1点Pを保持した後、当該保持機構310Aは、水平状態からやや傾けた載置板402よりも高い位置に第1点Pが到達するまでTシャツTを吊り上げ、図18(g)に示される状態となる(第6の制御、ステップS7)。載置板402を水平状態からやや傾けているのは、TシャツTが滑り落ちるのを防ぐためである。載置板402の傾きは、たとえば、鉛直方向に対して0度から80度が好ましく、TシャツTの最下点を保持するときに、保持機構(310A、310B)と載置板402とが干渉しないために、鉛直方向に対して30度から80度がより好ましい。TシャツTを吊り上げていく途中で、フィンガ部材322Aは、ロータリアクチュエータ326Aにより、鉛直下向きにされている。
なお、複数の被処理物Tが処置装置1に同時に投入された場合は、その内一つの被処理物Tが吊り上げられた後、搬送コンベヤ204は、再び順方向に回転し、残りの被処理物Tを順方向に搬送する。吊り上げられた被処理物Tの折り畳みの終了後、次の折りたたみの対象となる被処理物Tを吊り上げるべく、ステップS4に戻って、搬送コンベヤ204が逆方向回転し、被処理物Tが障害部材222の凹面に向けて移動する。
<認識工程(図13)>
次に、認識工程について説明する。この段階では、制御装置900は、被処理物がTシャツであるとは識別していない。後述する種類識別工程(図13:ステップS14-2)にて、種類認識部914がTシャツTから外観上把握できる特徴量に基づいて被処理物の種類を識別する(TシャツTが、例えば「ズボン」「タオル」「スカート」でなく、「Tシャツ」であると識別される)。当該種類識別工程においてTシャツTの特徴的な部位を撮像装置500で撮像するため、及び、続く折り畳み工程のためには、吊り上げられた状態のTシャツT(図19(g))を展開する(広げる)ことが必要となる。本実施形態においては、図19(j)に示すように、TシャツTの袖口の両端が保持機構310A、310Bにより保持された状態まで展開してはじめて被処理物がTシャツTであると認識されるようになっている。この展開動作について、図18(h)乃至図19(j)を用いて説明する。
はじめに、図18(h)に示されるように、撮像装置500が、第1点Pで吊り下げられたTシャツTの画像データを取得し、当該画像データを制御装置900に送る。制御装置900に送られた画像データに基づき、第1端点検出部922が第1端点P1を検出する(第1端点検出工程、ステップS8)。具体的に説明すると、第1端点検出部922は、第1点Pで吊り下げられたTシャツTにおける最下点(最も低い位置にある点)を検出し、この最下点を第1端点P1とする。ここで、TシャツTの着丈(長さ)が長い場合、最下点の位置が低すぎて当該最下点が画像データに入らないおそれがある。第1端点検出部922が画像データに最下点が写っていないことを検知すると、保持装置制御部904は、第1点Pを保持している一方の保持機構310Aを扉202に近接する方向(矢印Y2方向)に水平移動させる。一方の保持機構310Aをこのように移動させると、載置板402から垂れ下がるTシャツTの長さが短くなる。これにより、TシャツTの着丈(長さ)が長い場合であっても、TシャツTの最下点を画像データに入れることができる。
次に、他方の保持機構310Bが検出された第1端点P1を保持する(第7の制御、ステップS9)。このとき、他方の保持機構310Bのフィンガ部材322Bは、ロータリアクチュエータBにより、鉛直上向きに保持されている。然る後、一方の保持機構310Aが第1点Pを保持したまま右方向(矢印X1方向)へ水平移動するとともに、他方の保持機構310Bが第1端点P1を第1点Pと同じ高さまで吊り下げる(第8の制御、ステップS10)。他方の保持機構310Bが第1端点P1を吊り上げていく途中で、フィンガ部材322Bは、ロータリアクチュエータ326Bにより、鉛直下向きになっている。
次に、図18(i)に示されるように、撮像装置500が、第1端点P1と第1点Pとを同じ高さで吊り上げられたTシャツTの画像データを取得し、当該画像データを制御装置900に送る。制御装置900に送られた画像データに基づき、第2端点検出部924が第2端点P2を検出する(第2端点検出工程、ステップS11)。具体的に説明すると、第2端点検出部924は、保持機構310A,310Bが第1点Pと第1端点P1との両方を互いに同じ高さで保持した状態の被処理物Tにおける最下点を第2端点P2とする。つまり、第1点Pと第1端点P1とを結ぶ直線L1から最も離れた第2端点P2を検出する。ここで、TシャツTの幅が広い場合、最下点の位置が低すぎて当該最下点が画像データに入らないおそれがある。第2端点検出部924が画像データに最下点が写っていないことを検知すると、保持装置制御部904は、第1点Pを保持している一方の保持機構310A、および、第1端点P1を保持している他方の保持機構310Bを扉202に接近する方向(矢印Y2方向)に水平移動させる。両保持機構310A,310Bをこのように移動させると、載置板402から垂れ下がるTシャツTの長さが短くなる。これにより、TシャツTの幅が広い場合であっても、TシャツTの最下点を画像データに入れることができる。第2端点検出部924によって第2端点P2が検出されると、第1端点P1を保持していた他方の保持機構310Bは、第1端点P1を開放し、然る後、第2端点P2を保持する(第9の制御、ステップS12)。なお、このとき、他方の保持機構310Bのフィンガ部材322Bは、ロータリアクチュエータBにより、鉛直上向きに保持されている。
次に、図19(j)に示されるように、第2端点P2を保持している他方の保持機構310Bは、第2端点P2を第1点Pと同じ高さまで吊り上げる。他方の保持機構310Bが第1端点P1を吊り上げていく途中で、フィンガ部材322Bは、ロータリアクチュエータ326Bにより、鉛直下向きになっている。また、載置板402が順方向回転する(第10の制御、ステップS13)。これにより、TシャツTは載置板402よりも奥側(矢印Y1方向、撮像装置500側)において、当該TシャツTの着丈が鉛直方向となるように吊り下げられる。つまり、一方の保持機構310Aおよび他方の保持機構310Bは、それぞれ、TシャツTの袖を保持している。撮像装置500からみれば、TシャツTが載置板402の手前にくるので、TシャツTの撮像装置500の画像データによる長さ検出等において載置板402が妨げとなるようなことはない。なお、載置板402は、第10の制御(ステップS13)において、TシャツTを撮像装置500側に押し出しつつ、扉202に接近する方向(矢印Y2方向)に移動してもよい。
次に、この状態で、長さ検出部915は、撮像装置500から得られた画像データに基づきTシャツTの縦方向長さ(着丈)および横方向長さ(幅)を測定し、その測定結果を制御装置900のRAM等に一時的に保存する(長さ測定工程、ステップS14-1)。
次に、種類認識部914は、撮像装置500から得られた画像データに基づきTシャツTの種類を認識する(種類識別工程、ステップS14-2)。具体的には、当該画像データからTシャツTの特徴量を算出する。この特徴量は、TシャツTの形状、全体の長さ、および、表面の模様や色等、TシャツTから外観上把握できる全ての要素が対象となる。TシャツTの特徴量を算出した後、種類認識部914は、当該特徴量毎に予め作成しておいたRandmaiz forest識別器を用いて被処理物Tの種類を認識する。種類の認識が完了すると、種類認識部914は、種類(本実施形態ではTシャツ)に対応する「折り畳み情報」を得る。例えば、TシャツTの「折り畳み情報」には、着丈方向で2つ折りするために必要な「横折り線B1の位置情報」、および、幅方向で3つ折りするために必要な「第1折り線B2の位置情報」と「第2折り線B3の位置情報」とが含まれる。
なお、本実施形態では、第1点PがTシャツTの袖部であるケースで説明しているので、TシャツTの袖口の両端が保持機構310A、310Bにより保持された状態まで最短で展開されている。しかしながら、第1点PはTシャツTのどの部分でもあり得る。最初の第1点Pの位置及びTシャツTの載置状態次第では、第2端点を保持した段階ではTシャツTの袖口の両端が保持機構310A、310Bにより保持されていない。このような場合(TシャツTの袖口の両端が保持機構310A、310Bにより保持されていない場合)、本実施形態においては、種類認識部914は、TシャツTが「Tシャツ」であると認識できない。そのため、処理装置1は、TシャツTの袖口の両端が保持機構310A、310Bにより保持される状態になる(種類認識部914が、TシャツTが「Tシャツ」であると認識する)まで、さらに複数回、保持機構310A、310BによりTシャツTの最下点を持ち替える。種類認識までに要する持ち替えの回数は、被処理物Tの種類及び最初の第1点Pが被処理物Tのどの位置であるかによってかわり得る。一例としては、被処理物Tが長ズボンや長袖のように長い袖や裾を有する場合は、概ね2回の持ち替えにより、Tシャツやタオルの場合は概ね3回の持ち替えにより被処理物Tの認識ができる。
<折り畳み工程(図14)>
次に、図19(k)に示されるように、第1点Pを保持している一方の保持機構310Aおよび、第2端点P2を保持している他方の保持機構310Bは、扉方向(矢印Y2方向)に水平移動する。然る後、一方の保持機構310Aは第1点Pを開放する。また、他方の保持機構310Bは第2端点P2を開放する(第11の制御、垂れ長さ検出工程、ステップS15)。具体的に説明すると、先に取得されたTシャツTの情報に、TシャツTの横折り線B1の位置が含まれている。TシャツTの場合、横折り線B1は、着丈のちょうど半分の位置に設定されている。第11の制御では、水平から角度をつけた状態の載置板402における上側の縁線(第1縁線C1)にこの横折り線B1が沿うまで、両保持機構310A,310Bが扉方向(矢印Y2方向)に水平移動する。これにより、TシャツTが第1縁線C1を擦るようにして移動する(TシャツTが載置板402に対して押し付けられるように移動する)ので、TシャツTと第1縁線C1との接触箇所におけるシワを取り除くことができる。また、これにより、処理装置1の背面106Bの内面に取り付けられた第1の撮像部502側にTシャツTの裾側(下部)が向くようになる。横折り線B1が第1縁線C1に沿っているか否かは、制御装置900における垂れ長さ検出部916が判断する。すなわち、撮像装置500における第1の撮像部502が連続的に撮像した画像データを受けた垂れ長さ検出部916は、順次、載置板402の第1縁線C1からTシャツTの下端(裾)までの垂れ長さを確認する。上述のように、TシャツTの横折り線B1の位置は、TシャツTの着丈のちょうど半分の位置に設定されているので、垂れ長さがTシャツTの着丈の半分の長さになったことを検出した垂れ長さ検出部916からの信号により、保持装置制御部904は、両保持機構310A,310Bの水平移動を停止させる。
次に、図19(l)に示されるように、撮像装置500が、載置板402から垂れ下げられたTシャツTの画像データを取得し、当該画像データを制御装置900に送る。制御装置900に送られた画像データに基づき、第3端点検出部926が第3端点P3を検出する(第3端点検出工程、ステップS16)。また、同じく制御装置900に送られた画像データに基づき、第4端点検出部928が第4端点P4を検出する(第4端点検出工程、ステップS17)。なお、この第4端点検出工程は、後述する、第13の制御、ステップS19の際に実施してもよい。第3端点検出工程を具体的に説明すると、第3端点検出部926は、画像データに基づき、載置板402から垂れ下げた状態におけるTシャツTの裾側における右側(矢印X1方向)の下方隅部を検出し、当該隅部を第3端点P3とする。また、第4端点検出工程を具体的に説明すると、第4端点検出部928は、画像データに基づき、載置板402から垂れ下げた状態におけるTシャツTの裾側における左側(矢印X2方向)の下方隅部を検出し、当該隅部を第4端点P4とする。少なくとも第3端点P3が検出された後、一方の保持機構310Aは、第3端点P3を保持する(第12の制御、ステップS18)。なお、このとき、一方の保持機構310Aのフィンガ部材322Aは、ロータリアクチュエータ326Aにより、鉛直上向きに保持されている。
次に、図20(m)に示されるように、第3端点P3を保持した一方の保持機構310Aは、第3端点P3を第4端点P4の真上に移動させる(第13の制御、ステップS19)。具体的には、一方の保持機構310Aは、第3端点P3を保持した状態で、左(矢印X2方向)上方に移動する。これにより、第3端点P3が第4端点P4の真上に移動する。なお、一方の保持機構310Aが第3端点P3を吊り上げていく途中で、フィンガ部材322Aは、ロータリアクチュエータ326Aにより、鉛直下向きになっている。
次に、図20(n)に示されるように、他方の保持機構310Bは、第4端点P4を保持する(第14の制御、ステップS20)。具体的には、他方の保持機構310Bのロータリアクチュエータ326Bがフィンガ部材322Bを上方に向ける。そして、他方の保持機構310Bは、当該フィンガ部材322Bが上方を向いた状態で、TシャツTの下方から第4端点P4を保持する。
次に、図20(o)に示されるように、他方の保持機構310Bは、第4端点P4を、第3端点P3よりも右側(矢印X1方向)で、かつ、第3端点P3と同じ高さまで吊り上げる。このとき、他方の保持機構310Bは、ロータリアクチュエータ326を動作させてフィンガ部材322を下方に向ける。然る後、載置板402が順方向(左側面102Dから見て回転軸412が反時計回り)回転する。これにより、TシャツTの裏表が逆転する。具体的に説明すると、ステップS20が完了した段階では、TシャツTの背面が第1の撮像部502に対向していたが、ここまでの動作によってTシャツTの正面が第1の撮像部502に対向するようになる。TシャツTの表裏が逆転した後、第3端点P3を保持する一方の保持機構310A、および、第4端点P4を保持する他方の保持機構310Bは、扉方向(矢印Y2方向)に水平移動する。然る後、一方の保持機構310Aは第3端点P3を開放する。また、他方の保持機構310Bは第4端点P4を開放する(第15の制御、垂れ長さ検出工程、ステップS21)。具体的に説明すると、ステップS15で実施したことと同様、水平から角度をつけた状態の載置板402における上側の縁線(第1縁線C1)にこの横折り線B1が沿うまで、両保持機構310A,310Bが扉方向(矢印Y2方向)に水平移動する。これにより、処理装置1の背面106Bの内面に取り付けられた第1の撮像部502側にTシャツTの襟側(上部)が向くようになる。横折り線B1が第1縁線に沿っているか否かは、制御装置900における垂れ長さ検出部916が判断する。すなわち、撮像装置500における第1の撮像部502が連続的に撮像した画像データを受けた垂れ長さ検出部916は、順次、載置板402の第1縁線からTシャツTの下端(襟)までの垂れ長さを確認する。上述のように、TシャツTの横折り線B1の位置は、TシャツTの着丈のちょうど半分の位置に設定されているので、垂れ長さがTシャツTの着丈の半分の長さになったことを検出した垂れ長さ検出部916は、両保持機構310A,310Bの水平移動を停止させる。
次に、図21(p)に示されるように、撮像装置500が、載置板402から垂れ下げられたTシャツTの画像データを取得し、当該画像データを制御装置900に送る。制御装置900に送られた画像データに基づき、第5端点検出部930が第5端点P5を検出する(第5端点検出工程、ステップS22)。また、同じく制御装置900に送られた画像データに基づき、第6端点検出部932が第6端点P6を検出する(第6端点検出工程、ステップS23)。具体的には、第5端点検出部930は、水平状態から所定の角度をつけた状態の載置板402における上側の縁線(第1縁線C1)に、横折り線B1が沿うようにしてTシャツTを載置板402に垂れ下げた状態で、TシャツTの右側(矢印X1方向)上方隅部を第1の撮像部502および第2の撮像部504からの画像データに基づいて検出し、この右側上方隅部を第5端点P5とする。また、第6端点検出部932は、TシャツTの左側(矢印X2方向)上方隅部を第1の撮像部502および第2の撮像部504からの画像データに基づいて検出し、この左側上方隅部を第6端点P6とする。
さらに、載置板402が回動して、当該載置板402は鉛直状態となる。そして、一方の保持機構310Aは、第5端点P5を保持する。また、他方の保持機構310Bは、第6端点P6を保持する(第16の制御、ステップS24)。具体的には、一方の保持機構310Aは、ロータリアクチュエータ326Aを動作させ、フィンガ部材322Aが下方を向いた状態で第5端点P5を保持する。また、他方の保持機構310Bは、ロータリアクチュエータ326Bを動作させ、フィンガ部材322Bが下方を向いた状態で第6端点P6を保持する。
次に、図21(q)に示されるように、両保持機構310A,310Bは、第5端点P5および第6端点P6を保持した状態でTシャツTの一部又は全部を載置板402よりも高く吊り上げる。その後、載置板402は回動して水平に保持される。さらにその後、両保持機構310A,310Bは、載置板402の幅方向(矢印X方向)中央よりも右方(矢印X1方向)に第5端点P5および第6端点P6を移動させるとともに、保持機構310Bは、保持機構310Aを中心とする円周上を、保持機構310Aと保持機構310Bとを結ぶ線分が載置板402の幅方向(矢印X方向)に対して垂直になるまで移動する。言い換えると、両保持機構310A、310Bは、載置板402の幅方向(X方向)中央よりも右方で第5端点P5および第6端点P6が前後方向(矢印Y方向)に並ぶように移動する。ここで、水平にした載置板402における奥側(矢印Y1方向)の縁線を第1縁線C1という。逆に、当該載置板402における扉側(矢印Y2方向)の縁線を第2縁線C2という。なお、この移動(TシャツTを吊り上げつつ第5端点P5および第6端点P6を前後方向(矢印Y方向)に並べる移動)の際に、TシャツTの一部を載置板402の第1縁線C1に沿わせるように移動させると、TシャツTのシワを抑制することができるのでより好ましい。
第5端点P5および第6端点P6を前後方向(矢印Y方向)に並べたとき、両保持機構310A,310Bは、載置板402の第1縁線C1を含む垂直面を仮想したとき、当該垂直面がTシャツTの第1折り線B2を含むように、第5端点P5および第6端点P6の位置を決定する。なお、ここまでの移動において、両保持機構310A,310Bは、第5端点P5と第6端点P6との間の距離が常に一定となるように移動する。
然る後、両保持機構310A,310Bは、左方向(矢印X2方向)に移動しつつ、下方に移動する。これにより、TシャツTは、載置板402上を左方向(矢印X2方向)に沿ってスライドし、TシャツTの下端部(襟側)が、水平にした載置板402の上面に載置される(第17の制御、ステップS25)。なお、このとき、両保持機構310A,310Bのフィンガ部材322A,322Bは、ロータリアクチュエータ326A,326Bにより、水平横向きに保持されている。上述のように、長さ検出部915によって、TシャツTの着丈および幅が測定されているので、TシャツTの第1折り線B2が載置板402の第1縁線C1を含む垂直面に含まれるように、TシャツTを位置決めすることができ、TシャツTを載置板402の上面に載置したとき、TシャツTの第1折り線B2は,載置板402の第1縁線C1に沿っている。またこの際に、TシャツTは、載置板402上を沿うようにスライドする(載置板402と擦り合いながら移動する)ので、TシャツTのシワを伸ばすことができる。
然る後、一方の保持機構310Aは、第5端点P5を開放する。また、他方の保持機構310Bは、第6端点P6を開放する(第18の制御、ステップS26)。
次に、図21(r)に示されるように、載置板402は、逆方向回転(左側面102Dから見て回転軸412が時計回りに回転すること)して鉛直向きになる(第19の制御、ステップS27)。これにより、第1折り線B2が載置板402の第1縁線C1に沿った状態で、TシャツTが載置板402に掛けられた状態となる。この状態において、TシャツTの第1端部分D1は、載置板402の奥側(矢印Y1方向)に垂れ下がっている。また、TシャツTの中央部分D2および第2端部分D3は、載置板402の扉側(矢印Y2方向)に垂れ下がっている。
次に、図22(s)に示されるように、撮像装置500が、載置板402に掛けられたTシャツTの画像データを取得し、当該画像データを制御装置900に送る。制御装置900に送られた画像データに基づき、第7端点検出部934が第7端点P7を検出する(第7端点検出工程、ステップS28)。また、同じく制御装置900に送られた画像データに基づき、第8端点検出部936が第8端点P8を検出する(第8端点検出工程、ステップS29)。具体的には、第7端点検出部934は、鉛直状態の載置板402における上側の縁線(第1縁線C1)に被処理物Tの第1折り線B2が沿うようにして掛けられたTシャツTの右側(矢印X1方向)上方隅部を第1の撮像部502および第2の撮像部504からの画像データに基づいて検出し、当該隅部を第7端点P7とする。また、第8端点検出部936は、TシャツTの左側(矢印X2方向)上方隅部を第1の撮像部502および第2の撮像部504からの画像データに基づいて検出し、当該隅部を第8端点P8とする。
然る後、一方の保持機構310Aは、第7端点P7を保持する。また、他方の保持機構310Bは、第8端点P8を保持する。具体的には、一方の保持機構310Aは、ロータリアクチュエータ326Aを動作させ、フィンガ部材322Aが下方を向いた状態で第7端点P7を保持する。また、他方の保持機構310Bは、ロータリアクチュエータ326Bを動作させ、フィンガ部材322Bが下方を向いた状態で第8端点P8を保持する。
次に、両保持機構310A,310Bは、第7端点P7および第8端点P8を保持しつつTシャツTが載置板402から離間するまで吊り上げる。そして、載置板402は、順方向回転し、水平となる(第20の制御、ステップS30)。
次に、図22(t)に示されるように、両保持機構310A,310Bは、水平な載置板402上にTシャツTを載置する(第21の制御、ステップS31)。具体的には、両保持機構310A,310Bは、扉方向(矢印Y2方向)に水平移動し、TシャツTを載置板402よりも扉側に位置させる。然る後、両保持機構310A,310Bは、TシャツTを降下させつつ、奥方向(矢印Y1方向)に移動させていく。これにより、TシャツTは、その第1端部分D1の上に中央部分D2が重なるようにして載置板402の上に載置される。第1端部分D1と中央部分D2との折れ目は、TシャツTの第1折り線B2と一致している。また、上述のように、長さ検出部915によって、TシャツTの着丈および幅が測定されているので、両保持機構310A,310Bは、載置板402との位置関係に基づいて、TシャツTにおける第2折り線B3が、載置板402における扉方向(矢印Y2方向)の縁線である第2縁線C2に沿うようにTシャツTを載置することができる。このとき、第2縁線C2は、載置板402から垂れ下がっている。
次に、図22(u)に示されるように、載置板402の第2縁線C2が第2折り線B3と沿うようにしてTシャツTが載置された載置板402は、挟持装置700の近傍まで水平に移動する。TシャツTが載置された載置板402が近づいてくると、上側挟持板702および下側挟持板704が互いに近接する方向に回動する。具体的には、上側挟持板702は、鉛直上向き状態から水平状態となるように回動する。下側挟持板704は、鉛直下向き状態から水平状態となるように回動する。最終的に、回動してきた上側挟持板702および下側挟持板704により、TシャツTおよび載置板402が挟持される(第22の制御、ステップS32)。TシャツTにおける載置板402から垂れ下がった第2端部分D3は、下側挟持板704によって持ち上げられる。これにより、第2折り線B3に沿って第2端部分D3が折られた状態となる。TシャツTの中央部分D2(第1端部分D1)と第2端部分D3との間には、載置板402が介挿された状態になっている。
次に、図23(v)に示されるように、載置板402が移動して、挟持装置700から離間する(第23の制御、ステップS33)。これにより、挟持装置700は、TシャツTだけを挟持した状態となる。また、挟持されたTシャツTは、着丈方向が横折り線B1で2つ折りにされており、さらに、幅方向が第1折り線B2および第2折り線B3で3つ折りにされている。
<搬送工程(図15)>
次に、図23(w)に示されるように、支持具802は、その上限まで上昇する。さらに、支持具用軸810が回動し、支持部材808は、鉛直下向きの状態から、水平状態になる。支持具用軸810の回動とともに、挟持装置700の上側挟持板702および下側挟持板704は、TシャツTを解放するように回動する。つまり、上側挟持板702は、鉛直上向きに回動する。下側挟持板704は、鉛直下向きに回動する(第24の制御、ステップS34)。これにより、解放されたTシャツTは、挟持装置700の下方にある支持部材808に載置される。なお、支持部材808は、下側挟持板704に設けられたスリット730に嵌まるので、搬送装置800が挟持装置700の直下に設けられても、支持部材808と下側挟持板704とが互いに干渉することがない。これにより、挟持装置700から解放された折り畳み済みのTシャツTを型崩れさせることなく支持部材808に載置することができる。
次に、図23(x)に示されるように、支持具802は、支持部材808の水平状態を保ちつつ、降下する(第25の制御、ステップS35)。そして、支持具802が扉202に設けられた被処理物受入箱Rの近くまで降下すると、支持具802は降下を停止し、その後、支持部材808は、鉛直下向きに回動する(第26の制御、ステップS36)。これにより、支持部材808の上から滑り下りたTシャツTが型崩れすることなく被処理物受入箱Rに収納される(図24(y)を参照)。
上述したステップS1からステップS36を繰り返すことにより、被処理物受入箱Rには、折り畳み済みのTシャツTが積層されていく。
<処理装置1の特長>
(1)本実施形態に係る処理装置1では、被処理物Tを保持する保持装置300A,300Bと、当該被処理物Tを載置可能であって回転可能に設けられた載置板402とを互いに組み合わせて制御する(例えば、第10の制御、第15の制御)。このため、被処理物Tを載置板402の一方側(例えば、扉側)から他方側(例えば、奥側)へ移動させる際において、被処理物T全体を載置板402の上方まで吊り上げたり、あるいは、被処理物T全体を前後方向(矢印Y方向)へ大きく移動させたりする必要がなくなる。つまり、被処理物Tの上部を載置板402の一方側で移動させた後、被処理物Tの下部が未だ載置板402の他方側にあるような場合、載置板402を当該一方側に向けて回転させることにより、他方側に残る被処理物Tの下部を巻き上げて一方側へ移動させることができる。これにより、被処理物Tが長尺物であっても、処理装置1における高さ方向の寸法および前後方向の寸法をコンパクトにすることができる。
(2)また、本実施形態に係る処理装置1では、第1端点P1や第2端点P2を検出する際(第7の制御、第9の制御)に、被処理物Tの最下点が画像データに入らない場合、被処理物Tをさらに吊り上げるのではなく、載置板402を介して反対側へ被処理物Tを水平に引くようになっている。これにより、被処理物Tの最下点の位置を上げることができる。また、このようにすれば、被処理物Tをさらに吊り上げるためスペースが不要となるので、処理装置1の高さ寸法をコンパクトにすることができる。
(3)本実施形態に係る処理装置1では、載置板402が有する2つの縁線(第1縁線C1および第2縁線C2)を利用して被処理物Tを折り畳むようにしているので、美しい折り目で、被処理物Tを2つ折りや3つ折りにすることができる。なお、上記説明した被処理物Tの折り方には特に限定はないことはいうまでもなく、4つ折りや、被処理物Tの形状に合わせて固有の位置に折り目をつけるようにしてもよい。
(4)本実施形態に係る処理装置1では、載置板402を備えることにより、被処理物Tを載置板402に掛けて作業を行うことができる。これにより、例えば、第1端点P1を保持していた他方の保持機構310Bが、次に、第2端点P2を保持する際(第9の制御)、第1端点P1を解放したままで第2端点P2を保持するために移動することができる。これは、当該移動の間、一方の保持機構310Aが第1点Pを保持しており、かつ、載置板402が被処理物Tを支持しているからである。このように、第1点P、第1端点P1、および、第2端点P2の3点を同時に保持する必要がなく、2点(第1点Pおよび第1端点P1、あるいは、第1点Pおよび第2端点P2)を同時に保持できればよいので、保持機構310の数が増加するのを防止できる。その結果、保持装置300A,300Bの構成を簡略化される。
また、被処理物Tを載置板402に掛けて作業を行うことで被処理物Tの揺れ等の動きを軽減することもできる。例えば、図18(g)に示すように、一方の保持機構310Aが第1点Pを保持した後、当該保持機構310Aは、水平状態からやや傾けた載置板402よりも高い位置に第1点Pが到達するまでTシャツTを吊り上げるが、一方の保持機構310Aが載置板402より上方に移動した段階で、載置板402を水平方向に移動させるか又は載置板402を回動させてTシャツTが載置板402に当接するようにしてもよい。この場合、TシャツTの一点(第1点P)を持って吊り上げた際の揺れを軽減することができる。これにより、続く、撮像装置500による画像データの取得(図18(h))をより的確かつ素早く行うことができる。
(5)本実施形態に係る処理装置1では、載置板402が前後方向に移動できるようになっているので、被処理物Tを認識したり折り畳んだりする床スペースが不要となる。このため、処理装置1の設置に要する床面積をコンパクトにすることができる。
(6)本実施形態に係る処理装置1では、挟持装置700を上側挟持板702および下側挟持板704といった「板材」で構成しており、これら「板材」で折り畳まれた被処理物T全体を挟持するようになっている。このため、折り畳まれた被処理物Tの隅部等を把持して搬送するような場合に比べて、折り畳まれた被処理物Tが型崩れするおそれを極めて少なくすることができる。
(7)本実施形態に係る処理装置1では、搬送装置800の支持具802が複数の支持部材808を有しており、各支持部材808を互いに離間して配置することによって、折り畳まれた被処理物Tを受ける櫛歯状の面が形成されている。これにより、挟持装置700の下側挟持板704に各支持部材808の間隔と同じ間隔でスリット730を形成することで、当該下側挟持板704と支持具802との干渉を回避できる。また、被処理物受入箱Rの側面に各支持部材808の間隔と同じ間隔でスリットSを形成する(図4参照)ことで、被処理物受入箱Rと支持具802との干渉を回避できるので、被処理物Tをより低い位置から静かに被処理物受入箱Rに収納することができる。これにより、被処理物Tが型崩れするおそれを低減できる。さらに、支持部材808の数を多くすることにより、折り畳まれた被処理物Tとの接触点を増加させて、当該被処理物Tが型崩れするおそれを低下させることができる。
(8)本実施形態に係る処理装置1では、搬送装置800の支持具802は、上下方向に移動できるようになっている。これにより、挟持装置700の高さと被処理物受入箱Rの高さとの間に開きがあるとしても、折り畳まれた被処理物Tを被処理物受入箱Rの高さに合わせた所定の位置まで降下させて、静かに被処理物受入箱Rに収納することができる。これにより、被処理物Tが型崩れする(被処理物Tの形が損なわれる)おそれをさらに低減できる。これとは逆に、支持具802ではなく、被処理物受入箱Rを支持具802の高さまで上昇させるようにしてもよい。つまり、支持具802と被処理物受入箱Rとを互いに相対移動できるようになっていればよい。
また被処理物受入箱Rを複数個設けてもよい。そして、被処理物Tの種類に応じた被処理物受入箱Rが支持具802の下方に配置されるように支持具802と被処理物受入箱Rとを互いに相対移動させるようにしてもよい。例えば、Tシャツは、第1の被処理物受入箱R1に、ズボンは、第2の被処理物受入箱R2に、タオルは、第3の被処理物受入箱R3に収納する等としてもよい。これにより、異なる種類の被処理物Tが同じ受入箱Rに積層される場合に比べて被処理物Tの型崩れ等を減少させることができ、また処理装置1から取り出した後の仕分けも不要になる。
なお、本実施形態1に係る処理装置1は、種類識別工程において、被処理物Tの種類を認識する(図13:S14-2)が、この際に、被処理物Tの追加の属性(例えば所有者/使用者)を認識するようにしてもよい。すなわち、各被処理物Tの特徴(例えば、色やサイズ等)と追加の属性(例えば、所有者/使用者)とを対応付けて予め種類認識部に入力しておき、種類識別工程において被処理物Tの追加の属性(例えば所有者/使用者)も認識するようにしても良い。これにより、複数の被処理物受入箱Rのうち被処理物Tの追加の属性(例えば所有者/使用者)に応じた被処理物受入箱Rが支持具802の下方に配置されるように支持具802と被処理物受入箱Rとを互いに相対移動させるようにしてもよい。例えば、父親の被処理物Tは、第1の被処理物受入箱R1に、母親の被処理物Tは、第2の被処理物受入箱R2に、子供の被処理物Tは、第3の被処理物受入箱R3に収納する等としてもよい。これにより、処理装置1から取り出した後の仕分けが不要になる。
(9)本実施形態に係る処理装置1では、搬送装置800の支持具802は、鉛直下向きに回動できるようになっている。これにより、支持具802に載置された状態の折り畳まれた被処理物Tを被処理物受入箱Rに収納する際、支持部材808上を滑らせて被処理物Tを静かに被処理物受入箱Rに収納することができる。これにより、被処理物Tが型崩れするおそれを低減できる。
(10)本実施形態に係る処理装置1では、搬送装置800は、挟持装置700の下流側に配置されている。これにより、搬送装置800による折り畳まれた被処理物Tの搬送作業と、挟持装置700までに実施される被処理物Tの折り畳み作業とを同時進行させることができる。この結果、処理装置1の作業効率を高めることができる。
(11)本実施形態に係る処理装置1では、搬送コンベヤ204の上面に障害部材222を配置して、搬送コンベヤ204によって搬送された被処理物Tが当該障害部材222に乗り上げるようになっている。これにより、薄物の被処理物T(例えば、ハンカチ)が展開された状態で搬送コンベヤ204上に平たく載置された場合であっても、保持機構310A,310Bのフィンガ部材322で被処理物Tを容易に保持できる。ここで、図4に示すように障害部材222を幅方向(矢印X方向)に延びる長尺の部材とすることで、幅方向(矢印X)すべての位置において、被処理物Tを乗り上げさせることができる。これにより、被処理物Tの端点を最初から第1点Pとして把持できる可能性を高めることができる(障害部材222を幅方向の特定の箇所(例えば中央のみや、離間した複数箇所)にのみ設けることも可能であるが、そのような場合、被処理物Tの端点が当該特定の箇所にこない限り、被処理物Tの端点を最初から第1点Pを把持することはできない)。
(12)本実施形態に係る処理装置1では、搬送コンベヤ204の上面に投入された被処理物Tを一時的に処理装置1の奥側に移動させ、然る後、障害部材222を搬送コンベヤ204の上面に配置し、搬送コンベヤ204を逆転させて被処理物Tを扉側に戻すようになっている。これにより、被処理物Tを障害部材222に乗り上げさせて保持機構310Aが保持し易い第1点Pを形成するのに要する床スペースを減少させることができる。このため、処理装置1の設置に要する床面積をコンパクトにすることができる。
(13)本実施形態に係る処理装置1では、保持装置300A,300Bや載置装置400の下方に搬送コンベヤ204を配置している。これにより、保持装置300A,300Bおよび載置装置400を用いて被処理物Tの認識や折り畳みを行っている際に、当該被処理物Tが搬送コンベヤ204の上面に落下したとしても、再度、受入搬送装置200を用いて、受入搬送工程からやり直すことができる。
(14)本実施形態に係る処理装置1では、保持機構310における一対のフィンガ部材322の先端部に把持部材328が取り付けられている。この把持部材328は、フィンガ部材322に対して回転自在に取り付けられている。これにより、例えば、フィンガ部材322を上向きにした状態で被処理物Tの一部を保持した状態のまま、ロータリアクチュエータ326を回転させてフィンガ部材322を下向きにするとき、フィンガ部材322の回転に伴って、被処理物Tに対する把持部材328の位置は変化しないが、フィンガ部材322に対する把持部材328の角度は相対的に変化する。つまり、フィンガ部材322を下向きにしたとき、被処理物Tの重さにより、把持部材328は被処理物Tがフィンガ部材322から垂れ下がるように回動する。これにより、フィンガ部材322の先端部に被処理物Tが絡む可能性を低減できる。もし、把持部材328を設けなければ、上述した被処理物Tの絡まりを解除するために、被処理物Tを載置板402等に一時的に置き直す制御が必要となり、あるいは、フィンガ部材322により複雑な機構が必要となる。
(15)本実施形態に係る処理装置1では、撮像装置500における2つの撮像部502,504の撮像方向が互いに略直交するように設定されている。これにより、検出しようとする端点の位置を立体的に検出することができる。
以上、処理装置1について、図面に基づいて説明したが、具体的な構成は、これに限定されるものではない。以下に例示するような各変形例及びこれらの組み合わせも可能である。さらには、処理装置1B、処理装置1Bの変形例及びにこれらの組合せ、並びに、処理装置1C、処理装置1Cの変形例及びにこれらの組合せも可能である。なお、以下の変形例においては、説明に必要な構成を中心に説明及び図示し、その余の構成については省略する。
<変形例>
(A)先の実施形態に係る処理装置1では、撮像装置500の撮像部502,504としてデジタルスチルカメラを使用する例について説明したが、本発明はこれに限らず、被処理物T及び/又はその輪郭(エッジ)を検出するに際し、例えば、このデジタルスチルカメラに替えて又は加えて、被処理物に不可視光(赤外線又は紫外線)を照射する光源および不可視光フィルタ(赤外線フィルタ又は紫外線フィルタ)等を使用してもよいし、また例えば、撮像装置500として、デジタルスチルカメラに替えて又は加えて、光センサ、レーザ、距離センサ、マトリクス配置した位置センサ等を用いてもよい。
またさらに、被処理物T及び/又はその輪郭(エッジ)を検出するに際して、被処理物Tそのものに加えて又は替えて、被処理物Tの影を検出するようにしてもよい。例えば、複数の光源を設け、これら光源を個別にオン・オフした際の位置の変化を検出することで、被処理物Tを3次元的に把握可能である。影を検出することで被処理物Tの色の影響を受けずに検出が可能になる。
デジタルスチルカメラのみを使用する場合、例えば、表面に黒色部分を有する被処理物T(ボーダー柄のトレーナーで、ボーダー部分が黒色のもの)を制御装置900の種類認識部914で認識しようとすると、黒色部分が背景と同化してしまい、一体の被処理物Tであるにもかかわらず、あたかも黒色部分で分断されているかのように認識してしまうおそれがあった。この点、デジタルスチルカメラを赤外線フィルタと組み合わせて使用することにより、表面における黒色部分を含めた被処理物T全体が白っぽく写された画像データを得ることができる。なお、背景は黒色のままである。これにより、被処理物Tの黒色部分と背景とが同化することがなくなり、表面に黒色部分を有する被処理物Tであっても、正しく認識できる。なお、同様の効果を得るために、撮像装置500として、赤外線に感度をもつ専用の赤外線カメラを用いてもよい。
また、処理装置1の筐体形状や設置箇所によって、外部光が処理装置1の筐体内部に届かない場合もある。そこで、処理装置1は、撮像装置500による画像認識を補助するための照明装置(例えばLED、特に広角照射ができるLEDが好ましい)を備えても良い。照明装置は、制御装置900からの指示により点灯が制御され、例えば、撮像装置500の撮像の直前や、撮像装置500による画像が光量不十分であると認識された場合等に、撮像装置500の撮像範囲内に照射光を当てるべく点灯される。
ここで、撮像装置500による画像認識を補助する観点から、処理装置1の筐体内側表面を黒色とする(例えば、黒色の材料で形成する又は黒色に塗装する)ようにしてもよい。被処理物Tは、背景(筐体内側表面)よりも照明装置に近いので、照射光を当てた場合は背景よりも明度が高くなる。そのため、被処理物Tが黒色であったとしても、同じく黒色の背景(筐体内側表面)よりは明度が高くなるので、撮像装置500によって背景と峻別して認識することが可能となる。
処理装置1の筐体内側表面が黒でない場合(例えば青)、より濃い色の被処理物T(例えば濃い青)が配置されると、照射光により被処理物Tの明度がより高くなることで、被処理物Tの見かけの色(濃い青が青に近く見える)と背景の見かけの色(青)とがほぼ同じ色となり、被処理物Tが背景(筐体内側表面)に溶け込んでしまうことが生じ得る。このような理由から処理装置1の筐体内側表面の色としては、そのような事態が生じ得ない黒が好ましい。なお、処理装置1の筐体表面を、つや消しして、照明装置からの光を拡散反射する比率をより高めることで、撮像装置500による被処理物Tの認識性を高めるようにしてもよい。
また、筐体内部表面の特定箇所の色を撮像装置500のホワイトバランスの基準点としてもよい。これにより処理装置1の外部光による影響を抑制できる。さらには、処理装置1は筐体の隙間をなくして外部光を遮断し、光源として処理装置1の筐体内部の照明装置のみを利用してもよい。これにより、外部光の影響をさらに抑制できる。
なお、撮像装置500は、処理装置1内部で可動自在に配設してもよい。例えば、撮像装置500を、保持装置300に直接搭載し、保持装置300の移動と同時にリアルタイムで被処理物Tの撮像を行ってもよい。
また撮像装置500は、上記説明した被処理物Tの認識工程や折り畳み工程以外に用いても良い。例えば、撮像装置500により処理装置1内部に投入された被処理物Tの枚数や量をモニタリングして、折り畳み工程の完了までの予測時間を算出して表示したり、被処理物Tの未処理物がないこと(折り畳み完了)を認識し表示したりしてもよい。
(B)先の実施形態に係る処理装置1では、各移動機構をボールネジ機構やリニアモータ機構で実現する例について説明したが、本発明はこれに限らず、各移動機構をエアシリンダ機構、モータシリンダ機構、ベルトスライダ機構、電動スライダ機構、ラックピニオン機構、キャプスタン機構などの機構で実現してもよい。
なお、移動機構を含め処理装置1内部の駆動部分を例えばフッ素コーティング等することによりグリスレスとしてもよい。これにより、被処理物Tへの汚れの付着や、駆動部分にホコリがたまることによる摺動性の低下を抑制できる。
また、制御装置900は、各駆動機構の駆動電流を検知し、過負荷となっていないか否かをモニタリングすることで、被処理物Tが駆動機構(例えば、載置板402)に過度の負荷を与えていないか(例えば絡まっていないか、重すぎないか等)を検知するようにしてもよい。
(C)また、先に実施形態に係る処理装置1では、2つの撮像部502,504によって端点等を検出したり、被処理物Tの認識をしたりする例について説明したが、本発明はこれに限らず、1つ若しくは3つ以上の撮像部を設けてもよい。例えば、追加の撮像部500を、移動板416R(図8)上にレンズが移動板416Lに向かうように取り付けて、被処理物センサ409の替わりに障害物検知手段として用いても良い。また例えば、追加の撮像部500を、保持機構310A、310Bに設けて、被処理物Tの保持状態を撮像するようにしても良い。
(D)また、例えば、保持機構310Bで被処理物Tの第1端点P1を保持する際(第7の制御、ステップS9)、保持装置制御部904は、他方の保持機構310Bが検出された第1端点P1を保持するように制御を行うが、第1端点P1の検出位置の誤差等によって、現実に他方の保持機構310Bが被処理物Tを保持できているか否かは不明である。もし、他方の保持機構310Bが被処理物Tを保持できていなかった場合、以降の制御/ステップは成立しなくなる。保持機構310A,310Bで被処理物Tを保持する際に下記の保持判別工程を適用してもよい。
<保持判別工程>
本変形例において、制御装置900は、保持判別部918を備えている。保持機構310A,310Bで被処理物Tを保持する際、撮像装置500は、保持装置制御部904が保持制御を開始してから、保持を行った保持機構310A,310Bが少し移動するまでの間、連続的に、保持される位置(例えば、第1端点P1や第2端点P2)を含む周辺の画像データを得る。保持判別部918は、撮像装置500からの画像データを受け、保持装置制御部904が保持制御を開始してから、保持を行った保持機構310A,310Bが少し移動するまでの間における被処理物Tの外形状の差分をとる。
差分がゼロの場合、つまり、被処理物Tに変化が無い場合、保持判別部918は、保持機構310A,310Bは被処理物Tを保持できなかったと判別し、直前の制御/ステップを再度実施するよう制御装置900に促す。この際に、被処理物Tをより掴みやすくするために、被処理物Tの形状/位置をわずかに変化させるようにしてもよい。例えば、受入搬送工程(図12)において被処理物Tを吊り上げる事ができない場合は、搬送コンベア204を前後に少し移動させたり、また例えば、保持機構310Bで被処理物Tの第1端点P1を保持することができなかった場合は、保持機構310A/載置板402を移動させたりすることにより、被処理物Tの形状/位置を変化させる。
一方、被処理物Tの外形上の差分に有意な差分がある場合、つまり、被処理物Tに変化がある場合、保持判別部918は、保持機構310A,310Bは被処理物Tを保持できたと判別し、制御/ステップを進めていくよう制御装置900に促す。
なお、保持判別部918は、撮像装置500からの画像データを受けて保持判定を行うが、被処理物Tの位置(例えば、搬送コンベア204上にある場合等)によっては、保持機構310A,310B/移動機構320A,320Bのフレームが邪魔になって撮像装置500で被処理物Tをうまく撮像できない場合もある。このような場合の対処としては、例えば、(1)フレームが邪魔にならない箇所まで保持機構310A,310B移動させてから(例えば、保持機構310A,310Bを載置板402近傍まで持ち上げる)被処理物Tの外形状の差分をとる、(2)保持機構310A、310B/移動機構320A,320Bのフレームを透明の材料で構成する、(3)撮像装置500として、保持機構310A,310Bに小型のデジタルスチルカメラを追加で設けて、当該追加のカメラにより、画像データを取得する等の方法が可能である。
また、その他の保持判別工程の例として、例えば、保持機構310A、310Bに重量センサを設け、保持判別部918は、保持装置制御部904が保持制御を開始してからの重量の差分により、保持の有無を判定するようにしても良い。
このような保持判別部918を設け、保持機構310A、310Bで被処理物Tを保持する際に保持判別工程を行うことにより、各制御/ステップを確実に進めていくことのできる処理装置1を提供できる。
なお、処理装置1の振動等により、撮像装置500の撮像位置がずれてしまうことがある。この場合、ずれ前の撮像装置500の位置を前提として画像処理が行われると、実際の位置とずれが生じ、保持機構310A、310Bは、被処理物Tの保持を何度も失敗することになる。このような場合(例えば、撮像装置500に被処理物Tが写っているにかかわらず所定回数以上保持に失敗した場合)、保持判別部900は、撮像装置500の位置にズレが生じていると判断し、撮像装置500と保持機構310A、310Bとのキャリブレーションを行うようにしても良い。保持機構310A、310Bの物理的な可動限界(座標位置)は決まっているので、保持機構310A、310Bを当該可動限界まで移動させ、その時の撮像装置500による画像データから得られる座標位置を、当該可動限界の座標位置と照合することで、キャリブレーションを行う。
(E)先の実施形態に係る処理装置1では、受入搬送装置200における障害部材222を扉本体210から支持しており、扉本体210の回動に合わせて障害部材222も回動するようになっていた。しかしながら、本発明はこれに限らず、例えば、障害部材222を搬送コンベヤ204の上面に対して近接離間させるような障害部材上下方向移動機構(図示せず)をさらに設けてもよい。このような障害部材上下方向移動機構を設けることにより、障害部材222を搬送コンベヤ204の上面に配置することと、扉本体210の開閉とを別々に制御できるようになる。これにより、例えば、処理装置1に被処理物Tを投入した後、搬送コンベヤ204によって被処理物Tが処理装置1の奥側へ移動されるのを待つことなく、投入直後に扉本体210を閉じることができる。
(F)被処理物Tの最下点を検出する際(例えば、第1端点検出工程)、第1の撮像部502からの画像データに基づいて検出した最下点の位置と、第2の撮像部504からの画像データに基づいて検出した最下点の位置とが一致しない場合がある。そこで、被処理物Tの最下点を検出する際、第2の撮像部504で得られる画像データに対して、第1の撮像部502で得られた画像データに基づいて検出された最下点の位置の軌跡を投影してもよい。
(G)また、撮像装置500から得られる画像データにおける最小単位はピクセルであるが、画像データの濃淡を利用して当該ピクセル内に位置を算出することで、検出精度を向上させることができる。
(H)さらに、保持機構310A,310Bの原点位置を保持装置制御部904内に設定しておいてもよい。これにより、どの段階の制御/ステップからでも、必要に応じて、保持機構310A,310Bを原点に復帰させることができる。また、保持装置制御部904は、特定のステップの間、保持機構310Aのフィンガ部材322Aと保持機構310Bのフィンガ部材322Bとの間の最大距離を設定し、その距離以上にフィンガ部材322Aとフィンガ部材322Bとの距離が広がらないように、保持機構310A、310Bの移動を制御してもよい。例えば、認識工程において保持機構310Aが第1点Pを保持し、保持機構310Bが第1端点P1を保持する際(図18(h))、第1点Pと第1端点P1との距離を算出し、この距離を最大距離として保持装置制御部904内に設定する。そして次の第2端点Pの保持までの動作中(保持機構310Aが第1点Pを保持し、保持機構310Bで保持した状態で保持機構310A、310Bが移動している間)は、この最大距離を超えて、保持機構310A、310Bが移動しないように制御する。これにより、被処理物Tがその長さ(自重により伸びる長さ)以上にフィンガ部材322A及びフィンガ部材322Bにより引っ張られてしまうことを防止できる。そのため、被処理物Tが伸びてしまったり傷んでしまったりすることを抑制できる。
なお、保持機構310A、310Bによる被処理物Tの伸びや傷みを抑制するために、例えば、保持機構310A及び/又は310Bの一部(例えば、リニアアクチュエータ324と連結部材330との間等)に、バネ等の緩衝部材を設けても良い。これにより、被処理物Tを保持した状態で保持機構310Aと310Bとが互いに離間する方向に移動する場合、保持機構310A、310Bに設けた緩衝部材によって、被処理物Tにかかる引張力が小さくなるので、被処理物Tの伸びや傷みを抑制することができる。また例えば、保持機構310A及び/又は310Bに張力センサを設け、保持機構310A、310Bにかかる力を監視して、被処理物Tに必要以上の力がかからないように保持機構310Aと310Bの距離を制御してもよい。
また、保持機構310Aのフィンガ部材322Aと保持機構310Bのフィンガ部材322Bとに設けられた把持部材328に加えて又は替えて、フィンガ部材322A及びフィンガ部材322Bに滑り止め機能を設けても良い。滑り止め機能は、フィンガ部材322A及びフィンガ部材322Bとしてゴム等の摩擦抵抗の大きい部材を用いたり、被処理物Tとの接触面の表面粗さを大きくしたりして付与してもよいし、フィンガ部材322A及びフィンガ部材322Bに凹部を設けたりテーパ状の凸部(カエリ)を設けたりして付与してもよいし、またこれらを適宜組み合わせることで付与してもよい。
また保持装置300A及び300Bのフィンガ部材322A及び322Bに替えて、保持装置300A、300Bの一方又は双方を固定フックとしてもよい。この際、固定フックによる被処理物Tの伸びや傷みを抑制するために、保持機構310A及び/又は310Bの一部(例えば、リニアアクチュエータ324と連結部材330との間等)に、バネ等の緩衝部材を設けても良い。
また例えば、保持装置300A及び/又は300Bは、針状端部を有し、被処理物Tをこの針状端部で刺して保持する機能を有してもよいし、掃除機のように吸引部を有し、被処理物Tを吸引して保持する機能を有してもよいし、マジックテープ等の接着部や粘着部を有し、被処理物Tを接着等により保持する機能を有してもよいし、一対のタイヤ(ローラ)を端部に有し、このタイヤの間に被処理物Tを巻き込んで保持する機能等を有してもよい。
また例えば、保持装置300A及び/又は保持装置300Bに湿度センサや温度センサを設けて、把持した被処理物Tの乾燥状態を検知し、被処理物Tが十分に乾燥し、折り畳みに適した状態であるのかを検知するようにしてもよい。湿度センサや温度センサ替えて又は加えて、保持装置300A及び/又は保持装置300Bに重量センサを設け、被処理物Tの重さを検出することで被処理物が水分を多く含み乾燥していないことを検知するようにしてもよい。
また例えば、保持装置300A及び/又は保持装置300Bの保持力(把持力)を、被処理物Tの厚みや材質等に応じて適宜調整するようにしてもよい。被処理物Tの厚みや材質は、撮像装置500から得られる被処理物Tの画像データに基づいて検知してもよいし、保持装置300A及び/又は保持装置300Bのリニアアクチュエータの駆動モータへの負荷電流で検知してもよいし、保持装置300A及び/又は保持装置300Bに圧力センサを設けて検知してもよい。
なお、保持装置300A及び/又は保持装置300Bを、被処理物Tの保持以外の動作に用いても良い。例えば、保持装置300A及び/又は保持装置300Bを処理装置1のエラー発生時の自己修復(撮像装置500のカメラのホコリやくもりの除去、駆動機構のベルトの補修等)のために用いても良い。
(I)先の実施形態に係る処理装置1では、前後上下左右方向に移動可能であり、かつ、被処理物Tを把持することのできるフィンガ部材322を有する保持装置300A,300Bを2組使用する場合について説明した。しかし、本発明はこれに限定されるものではなく、例えば、一方の保持装置300Aを左右方向のみに移動可能としてもよい。これにより、処理装置1の構成を簡略化できる。以下では、一方の保持装置300Aを左右方向のみに移動可能とした例について説明する。
一方の保持装置300Aを左右方向のみに移動可能とした処理装置1は、図26に示されるように、一方の保持装置300Aが処理装置1内の正面106A寄りの上部に設けられている。この保持装置300Aの移動機構320Aは、先の実施形態にて説明した幅方向移動機構332Aのみを有しており、上下方向移動機構および前後方向移動機構は省略されている。
次に、一方の保持装置300Aが左右方向のみに移動可能な場合における、被処理物Tの認識/折り畳み動作について簡単に説明する。先の実施形態に係る処理装置1を用いた認識/折り畳み動作では、保持装置300A,300Bの動作には、大きく分けて、(1)保持装置300Aの保持機構310Aが単独で被処理物Tを保持するケース(例えば、保持機構310Aが第1点Pを保持する第6の制御、ステップ7)、および(2)保持装置300Aの保持機構310Aと、保持装置300Bの保持機構310Bとが同時に被処理物Tを保持するケース(例えば、保持機構310Aが第1点Pを保持し、保持機構310Bが第1端点P1を保持する第8の制御、ステップS10)がある。
一方の保持装置300Aを左右方向のみに移動可能とした実施形態の場合、上記(1)のケースでは、先ず、前後上下左右方向に移動可能な他方の保持装置300Bの保持機構310Bが被処理物Tにおける所定の位置を保持し、然る後、保持機構310Bが保持機構310Aの近傍まで移動して保持機構310Aに当該所定の位置を保持させる。また、上記(2)のケースでは、一方の保持機構310Aが保持すべき位置を他方の保持機構310Bが先に保持し、(1)のケースと同様に、一方の保持機構310Aに当該所定の位置を保持させる。然る後、他方の保持機構310Bは、同保持機構310Bが保持すべき位置を保持する。
一方の保持装置300Aを左右方向のみに移動可能とした実施形態における各保持装置300A,300Bの動作について、いくつかの制御/ステップを例に挙げて説明する。最初に第12~15の制御/ステップS18~S21について説明する。図27(aa)に示されるように、ステップS16で検出された第3端点P3を他方の保持機構310Bで保持する。然る後、他方の保持機構310Bは、第4端点P4の真上で待機している一方の保持機構310Aの近傍まで移動し、一方の保持機構310Aに第3端点P3を保持させる。然る後、図27(bb)に示されるように、他方の保持機構310Bは、第4端点P4を保持し(第14の制御、ステップS20)、当該第4端点P4を第3端点よりも右側(矢印X1方向)で、かつ、第3端点P3と同じ高さまで吊り上げる(第15の制御、ステップS21)。
次に、第16~17の制御/ステップS24~S25について説明する。図27(cc)に示されるように、先ず、第5端点P5を他方の保持機構310Bで保持する。然る後、他方の保持機構310Bは、一方の保持機構310Aの近傍まで移動し、一方の保持機構310Aに第5端点P5を保持させる。そして、他方の保持機構310Bは、第6端点P6を保持する(第16の制御、ステップS24)。その後、両保持機構310A,310Bは、載置板402よりも右方(矢印X1方向)に第5端点P5および第6端点P6を移動させる。さらに、両保持機構310A,310Bは、載置板402よりも右方で第5端点P5および第6端点P6が前後方向(矢印Y方向)に並ぶように移動する。然る後、保持機構310Aは左方向(矢印X2方向)に移動し、これに伴い、保持機構310Bは左方向(矢印X2方向)に移動しつつ降下する。さらに、両保持機構310A,310Bの移動に併せて、載置板402が、水平状態から順方向回転(左側面102Dから見て回転軸412が反時計回りに回転すること)していく。これにより、保持機構310Aの移動に伴って載置板402の扉側(矢印Y2側)縁部が保持機構310Aに近づいていくことになり、先の実施形態のように、水平状態で待機している載置板402に保持機構310Aが降下して近づいていく場合と同様に、TシャツTを載置板402の上面に載置することができる(第17の制御、ステップS25)。なお、保持機構310Bが対応する、載置板402の奥側(矢印Y1側)縁部は下方に移動するので、先の実施形態の場合に比べて、保持機構310Bが降下する距離を長くする必要がある。
さらに、第20~21の制御/ステップS30~S31について説明する。図28(dd)に示されるように、先ず、第7端点P7を他方の保持機構310Bで保持する。然る後、他方の保持機構310Bは、一方の保持機構310Aの近傍まで移動し、一方の保持機構310Aに第7端点P7を保持させる。そして、他方の保持機構310Bは、第8端点P8を保持し、この第8端点P8を吊り上げる(第20の制御、ステップS30)。
次に、図28(ee)に示されるように、両保持機構310A,310Bは、載置板402上にTシャツTを載置する(第21の制御、ステップS31)。具体的には、両保持機構310A,310Bで第7端点P7および第8端点P8を保持してTシャツTを吊り上げた状態で(図29(a))、載置板402を鉛直向きから少し順方向回転(左側面102Dから見て回転軸412が反時計回りに回転すること)させる(図29(b))。然る後、保持機構310Aによる第7端点P7の保持を解除するとともに、第8端点P8を保持しつつ保持機構310Bを降下させる(図29(c))。また、保持機構310Bの降下に伴って、載置板402をさらに順方向回転させていく。これにより、TシャツTの折り形状を保ちつつ、TシャツTを載置板402に載置することができる(図29(d))。
(J)さらに言えば、一方の保持装置300Aから移動機構320Aを全て省略し、開閉動作を有するフィンガ部材322Aではなく、開閉動作の無い固定フックのみで一方の保持装置300Aを構成してもよい。これにより、処理装置1の構成をさらに簡略化できる。なお、この場合、一方の保持機構310Aの動きの多くが制限されることになるので、載置板402に載置した被処理物Tの折り形状がやや乱れるおそれがあるが、動きに自由度のある他方の保持機構310Bがこの乱れを修正するように動くことにより、被処理物Tの認識/折り畳みを実施できる。
(K)先の実施形態に係る処理装置1では、保持機構310A、310Bは、図6に示すように、矢印R1方向に回転するとともに、フィンガ部材322A、322Bが短手方向に互いに平行に近接、離間する方向に開閉するが、これに限られるものではない。例えば、図6に示すリニアアクチュエータ324A、324Bと連結板材330との間にロータリアクチュエータを追加して、フィンガ部材322A、322Bが、長手方向を軸として回転するようにしてもよい。これにより、例えばフィンガ部材322A、322Bが保持する被処理物Tの端部にねじれが生じているような場合、フィンガ部材322A、322Bを、長手方向を軸として順方向又は逆方向回転させることで、当該ねじれを解消することができる(ねじれが解消していない場合は、回転方向が逆なので逆回転させる)。なお、フィンガ部材322A、322Bに保持された被処理物Tにねじれが生じていること/ねじれが解消されたことは、例えば、撮像装置500によってフィンガ部材322A、322B近傍の被処理物Tの状態を撮像し、エッジ検出をすることで識別可能である。
(L)上記(K)で説明したフィンガ部材322A、322Bの回転は、フィンガ部材322A又は322Bが保持する被処理物Tの端部にねじれが生じているような場合に有効であるが、フィンガ部材322Aと322Bとの間で被処理物Tに絡まりや重なりが生じている場合がある。こうした絡まり等を解消又は抑制するために、保持装置制御部904は、認識工程中(被処理物Tの展開中)に保持機構310A、310Bの移動を制御して、次のような絡まり解消動作を行っても良い。
ここでは、認識工程のうち第1端点P1を保持した状態(図18(h))から、第2端点P2を保持する状態(図18(i))までの間に絡まり解消動作を行う場合を例にして説明する。
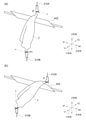
まず、図30(a)に示すように、一方の保持機構310Aが第1点Pを保持し、他方の保持機構310Bが第1端点P1を保持している状態で、一方の保持機構310Aを左方向(矢印X2方向)へ水平移動させるとともに、他方の保持機構310Bを右方向(矢印X1方向)へ水平移動させ、被処理物Tを幅方向(矢印X方向)に広げる。被処理物Tの一部が保持機構310A、310Bの間で絡まりや重なりが生じている場合、この動作により当該重なり/絡まりが解消又は改善され得る。次に、他方の保持機構310Bが第1端点P1を第1点Pと同じ高さまで吊り上げる(図30(b)及び図31(c))。他方の保持機構310Bが第1端点P1を吊り上げていく途中で、フィンガ部材322Bは、ロータリアクチュエータ326Bにより、鉛直下向きになる。
次に、図31(c)に示されるように、一方の保持機構310Aが第1点Pを保持し、他方の保持機構310Bが第1端点P1を保持している状態で、一方の保持機構310Aを右方向(矢印X1方向)へ水平移動させるとともに、他方の保持機構310Bを左方向(矢印X2方向)へ水平移動させ、保持機構310A、310Bの幅方向(矢印X1/X2方向)の位置を互いに入れ替える。被処理物Tは幅方向(矢印X方向)に反転されるので、これにより被処理物Tの重なり/絡まりが解消され得る。以降の動作は先の実施形態で説明したものと同様である。すなわち、第2端点検出部924は、第1点Pと第1端点P1とを結ぶ直線L1から最も離れた第2端点P2を検出する。第2端点P2が検出されると、第1端点P1を保持していた他方の保持機構310Bは、第1端点P1を開放し、然る後、第2端点P2を保持する(図31(d))。
このように、保持機構310A、310Bにて被処理物Tを保持している状態から次の最下点を保持する動作に入る前に、保持機構310A、310Bを幅方向に広げたり、幅方向位置を入れ替えたりすることで、被処理物Tの絡まりや重なりを解消ないし改善することができる。
(M)先の実施形態に係る処理装置1では、障害部材222に被処理物Tが乗り上げた状態になったことを検知する被処理物センサ409が、載置装置400の前後方向移動機構408における移動板416に取り付けられている。しかし、本発明はこれに限定されるものではなく、扉本体210が閉状態となったときにおける障害部材222の位置に被処理物センサ409を固定してもよい。
(N)先の実施形態に係る処理装置1では、図4に示すように障害部材222を幅方向(矢印X方向)に延びる長尺の部材としているが、これに限られるものではない。例えば、障害部材222を幅方向の特定の箇所(例えば中央のみや、離間した複数箇所)のみに設けるようにしても良い。また先の実施形態に係る処理装置1では、障害部材222は、非処理物受け部材220の側面板230に接続されているが、障害部材222は、非処理物受け部材220とは独立して設けても構わない。
(O)さらに、薄物の被処理物T(例えば、ハンカチ)が展開された状態で搬送コンベヤ204上に平たく載置された場合であっても、保持機構310A,310Bのフィンガ部材322で被処理物Tを容易に保持するという目的のためには、障害部材222に替えて、例えば次のような構成を採用することも可能である。
例えば、図4で示した障害部材222に替えて、搬送コンベア204の上面に、幅方向(矢印X方向)全体に一本又は複数の糸状部材(例えば、糸、針金等)を懸架し、この糸状部材を上下に(矢印Z方向)移動可能に構成して障害部材として用いても良い。糸状部材は、搬送コンベア204が順方向(被処理物Tが扉本体210から離間する方向)に回転している場合は、搬送コンベア204とほぼ同一の高さ位置まで移動される。そのため、搬送コンベア204上の被処理物Tの移動が糸状部材により妨げられることはない。一方、搬送コンベア204が逆方向(被処理物Tが扉本体210に近づく方向)に回転を始めると、糸状部材は、搬送コンベア204から離間するよう上方向に移動される(糸状部材が複数ある場合は、それぞれの高さ位置を、扉本体210に近づく方向(矢印Y2)に向かって徐々に高くなるようにしても良い)。糸状部材まで搬送された被処理物Tは糸状部材上に乗り上がるので、糸状部材は、障害部材として機能する。なお、糸状部材を上方向に移動するタイミングを、被処理物Tが糸状部材を乗り越えてからにしてもよい。この後で糸状部材を上方向に移動させると、被処理物Tは糸状部材によって持ち上げられるので、この場合も糸状部材は障害部材として機能する。
例えば、先の実施形態1に係る処理装置1では、コンベヤ204(図4参照)は水平面(XY面)を構成しているが、コンベヤ204の下面に固定又は可動の構造物を設けて、コンベア204の表面一部を鉛直方向(Z方向)に恒久的又は一時的に隆起する構造とし、障害部材として用いてもよい。
また例えば、図32(a)に示すように、被処理物Tの進行方向に対して2つに分割された第1のコンベヤ204A、第2のコンベヤ204Bを用い、被処理物Tがコンベヤ204Aに乗り上がったことを検知した後、図32(b)に示すように第1のコンベヤ204Aを傾けることで、実質的に被処理物Tを当初の載置面(第2のコンベヤ204Bと水平な面)よりも高く持ち上げるようにしてもよい。これにより、薄物の被処理物T(例えば、ハンカチ)が第2のコンベヤ204B上に平たく載置された場合であっても、被処理物Tは第1のコンベヤ204Aで持ち上げられるので保持機構310A、310Bのフィンガ部材322で被処理物Tを容易に保持することができる。
(P)先の実施形態に係る処理装置1では、受入搬送工程(図12)において処理装置1に投入された被処理物Tは、搬送コンベヤ204上に載置されるが、例えば、図33に示すように、搬送コンベヤ204の奥側(矢印Y1方向)に搬送コンベヤ204とわずかに離間させて補助受部材260を設け、搬送コンベヤ204を順方向回転させ被処理物Tを奥側に搬送する際に、補助部材260に被処理物Tの一部を乗り上げさせるようにしてもよい。補助受部材260は、搬送コンベヤ204の幅方向(図3の矢印X方向)と略同一幅を有する、長尺板材であり、図33に示すように上方(矢印Z方向)に向かうに従って傾斜が大きくなる弧状の断面形状を有する。搬送コンベア204の順方向回転により補助部材206に乗り上がった被処理物Tは、回転等の作用を受けた後、搬送コンベヤ204の逆方向回転により障害部材222に向かうようになる。すなわち、被処理物Tの搬送コンベヤ204上の載置状態/形状を搬送コンベヤ204の移動(矢印Y1/Y2方向)の度に変化させることができる。例えば、複数の被処理物Tが一度に処理装置1に投入された場合に、被処理物T同士のもつれを解消したり、複数の被処理物T同士のY方向の相対位置を変更したりすることができる。
(Q)先の実施形態に係る処理装置1では、載置板402として、略矩形状の板材である載置板本体410と回転軸412とで構成されたものを示したが、これに限られるものではない。
例えば、載置板402を複数の板材を互いに摺動可能に連結し、長辺及び短片の大きささが変更できるようにしてもよい。そして、例えば、認識工程(図13)においては、載置板402の幅を例えば半分や1/3程度まで縮めて、その後の、折りたたみ工程(図14)においては、元の大きさまで戻すようにしてもよい。また例えば、被処理物Tが小さいと認識された場合、折り畳み工程において、載置板402の長辺または短辺の大きさを例えば半分や1/3程度まで縮めて折り畳み工程を行ってもよい(図63(a)参照)。また例えば、被処理物Tが大きいと認識された場合、折り畳み工程において、載置板402の長辺または短辺の大きさを例えば1.5倍から3程度まで広げて折り畳み工程を行ってもよい(図63(b)参照)。
載置板402の材質としては、例えば、金属が挙げられる。金属は剛性が高く載置板402を薄くできるとともに、誘電率が低いため被処理物Tが衣服である場合等に発生する静電気を抑制することができる。これにより、被処理物Tの糸屑等が載置板402に付着してしまうこと等を防止できる。
また例えば、載置板402として樹脂を用いてもよい。樹脂を用いることにより、被処理物Tが濡れていたり処理装置1内部が高湿度下に置かれたり等のために載置板402に水分が付着したとしても、載置板402に錆が生じるような事態を防止できる。
また例えば、載置板402の一部を樹脂よりも誘電率が低い材料(例えば金属)で構成し、一部を樹脂で構成してもよい。
なお、載置板402の帯電を防止する観点から、処理装置1内にイオン噴出装置を設け、このイオン噴出装置から載置板402に対してイオンを含む空気を適宜(例えば、被処理物Tの折り畳みが終了し、次の被処理物Tの認識動作に入るまでの間等)照射するようにしてもよい。
図8に示すように、載置板本体410は、回転軸412方向(矢印X方向)に沿って横長の形状となっている。
載置板402の厚みは、適宜設定可能であるが、特に載置板402の縁部については、当該縁部に引っ掛けられた状態の被処理物Tを保持機構310A、310Bで把持することを考慮すると、3mm以下、より好ましくは2mm以下であることが好ましい。または、載置板402の縁部をテーパ加工して先端にいくにつれて厚みが薄くなるようにしてもよい。これにより、保持機構310A、310Bが、載置板402の端部に引っ掛けられた被処理物Tを把持した状態から載置板402を引き抜く際、保持機構310A、301Bが被処理物Tを把持したまま、載置板402を引き抜きやすくする。
載置板402は、保持機構310A、310Bによる把持により変形しない程度の剛性を有すること、言い換えれば、保持機構310A、310Bで把持する際にその厚みが変化しない材料であることがより好ましい。さらに言い換えると、保持機構310A、310Bで被処理物Tを把持した時の被処理物Tの厚みの変化量が、載置板402の変化量よりも大きくなっていることが好ましい。
また例えば、載置板402の縁部とりわけ角部に、被処理物Tを傷めないようにR加工を施しても良い。このようなR加工は、認識工程の初期段階で被処理物Tが十分に展開されていない場合や、被処理物Tがそもそも大きい場合等には、載置板402の角部に引っかかりやすいので重要である。一方で、被処理物Tの引っ掛けやすさをより重視して載置板402の縁部や角部へのR加工を施さなくてもよい。または、被処理物Tが引っ掛かりやすい載置板402の縁部の角部のみにR加工を施し、当該角部以外の部分にはR加工を施さないようにしてもよい。
また例えば、載置板402の表面、裏面、側面とで、異なる材質の板状部材を用いてもよい。例えば、載置板402の表面、一方の側面を摩擦係数の大きい材料を用いて又はコーティングして形成し、他方の側面、裏面を摩擦係数の小さい材料を用いて又はコーティングして形成することで、載置板402に被処理物Tを載置した場合の「滑りやすさ」を、載置板402の接触面(表面、側面、裏面)を選択することで自在に変更できるようにしてもよい。これにより例えば、被処理物Tをしっかり保持しておきたい動作の場合(例えば、2つの保持機構310A、310Bで被処理物Tを保持している状態において、被処理物Tを載置板402に引っ掛けて保持機構310A、310Bの保持を解除する場合等)は、載置板402の摩擦係数の大きい面が被処理物Tに当接するようにしてもよい。また例えば、上下の挟持板702及び704に挟持された状態の載置板402と被処理物Tから載置板402のみを離間させるような場合(図22(u)及び図23(v))等においては、載置板402の摩擦係数の小さい面が被処理物Tに当接するようにし、折りたたんだ被処理物Tにシワがよらないようにしてもよい。
また例えば、載置板402を表面から裏面に向かって貫通する一つ又は複数の貫通孔を設けてもよい。これにより、例えば、非処理物Tの折り畳みの際に載置板402の表面上に被処理物Tを載置して広げた場合、当該表面と被処理物Tとの間の余分な空気を、貫通孔を介して載置板402の裏面から抜き出すことができるので、被処理物Tのシワを抑制することができる。
また例えば、載置板402に非処理物Tの吸着、放出手段を設けてもよい。具体的には、載置板402に一又は複数の給気孔及び排気孔を設け、載置装置400内に設けた給気パイプ及び排気パイプにそれぞれ連通させるとともに、この給気パイプ及び排気パイプを処理装置1内部に設けた給排ポンプに接続させる。この給排ポンプを駆動することで、載置板402の給気孔及び排気孔から空気を吐出又は吸引させる。これにより、例えば、載置板402に載置された被処理物Tを取り出す際には、給気孔から空気を吐出して、被処理物Tを載置板402から取り出しやすくできる。また例えば、載置板402に載置された被処理物Tを載置板402上に保持する場合は、排気孔から空気を吸引して、被処理物Tを載置板402に吸引させるようにしてもよい。
(R)先の実施形態に係る<処理装置1の特長>(1)で述べたとおり、処理装置1は、被処理物Tの上部を載置板402の一方側で移動させた後、被処理物Tの下部が未だ載置板402の他方側にあるような場合、載置板402を当該一方側に向けて回転させることにより、他方側に残る被処理物Tの下部を巻き上げて載置板402一方側へ移動させることができる。これに加えて、処理装置1は、保持装置制御部904及び載置装置制御部906を制御して、被処理物Tが載置板402へ垂れ下がる位置を、被処理物Tの下側にずらす以下のような動作をしてもよい。
図34(a)に示すように、被処理物Tを保持機構310A又は310B(図示せず)によって載置台402に沿って規定位置まで吊り上げる。この状態で、撮像装置500により被処理物Tの画像データを取得し、被処理物Tの長さ(例えば、保持機構310A又は310Bの保持位置から被処理物Tの最下点までの距離)を算出する。次に、保持機構310A又は310Bの位置を固定した状態で、載置板402を順方向及び逆方向に交互に回動させることにより被処理物Tを引っ掛け/巻き上げつつ、載置板402を処理装置1の奥方向(矢印Y1方向)に向かって移動させる(図34(a)及び(b))。被処理物Tの長さによって規定される所定距離だけ載置板402が移動すると奥方向の移動が停止し、載置板402が鉛直状態になるように回動する(図35(c))。次に、載置板402は、鉛直状態を保ちながら、処理装置1の扉方向(矢印Y2方向)に移動する(図35(d))。この時、載置板402が鉛直状態を保っているので、被処理物Tが載置板402の上縁でしっかりと保持され移動中の被処理物Tのズレ落ちが防止される。載置板402が所定の位置まで戻ると、載置板402を所定の角度まで回動させる(図36(e))。ここまでの動作中、保持機構310A又は310Bの位置は固定した状態である。すなわち、当該動作により、保持機構310A又は310Bを動かすことなく、被処理物Tが載置板402へ垂れ下がる位置を被処理物Tの下側にずらすことができる。この動作は、保持機構310A又は310Bの可動範囲に制限がある中で、長い被処理物Tを展開する際に特に有効である。
(S)先の実施形態においては、被処理物TをTシャツTとしてその処理動作を説明したが、もちろん、処理装置1による被処理物Tの種類はこれに限られるものではない。以下では、被処理物TがズボンTである場合を例にとって、その認識工程と折り畳み工程を説明する。受入搬送工程、搬送工程は被処理物TがTシャツTの場合と同様であるので説明は省略する。
受入搬送工程の最後に一方の保持機構310Aにより被処理物Tの第1点Pを保持して吊り上げた後、図37(a)に示すように、ズボンTの最下点の持ち替えを繰り返していくと、図37(b)に示すように、保持機構310A及び310Bが、ズボンTの両裾を保持した状態となる。種類認識部914には、被処理物Tの持ち替え毎に撮像装置500から被処理物Tの画像データが入力されているが、この状態の画像データが入力されると、種類認識部914は、ズボンTの種類が「ズボン」であると認識し、「ズボン」に対応する折り畳み情報を取得する。またこの際に、長さ検出部915は、撮像装置500から得られた画像データに基づいてズボンTのウェスト部分の幅、ウェストから裾までの長さ等の各部寸法を測定し、当該測定結果を制御装置900のRAM等に一時的に保存する。
次に、折り畳み工程が開始される。まず、図38(c)に示すように、ズボンTをその長手方向略中央の位置で載置板402に掛けて吊り下げ、この状態で、載置板402上の一端部を保持機構310Aにより、載置板402から垂れ下がるズボンTのウェスト一端部を保持機構310Bにより保持して吊り上げる。次に、ズボンTのウェスト部分の中央部と股部分とを結ぶ直線が載置板402の縁線上に配置されるように、ズボンTのウェスト部分の幅に基づき保持機構310A及び310Bを移動させる(図38(d)及び図39(e))。このとき、撮像装置500からの被処理物Tの画像データに基づきズボンTの股下の一部が載置台402上に残っていると判断された場合、一方の保持機構310Aにより当該残った股下部分を保持して、載置板402から外す(図39(e))。
次に、載置板402上のズボンTの股部分とウェスト部分の中央部とをそれぞれ保持機構310A及び310Bにより保持して持ち上げて載置板402から外すとともに(図39(f))、一方の保持機構310Aを軸に他方の保持機構310Bを回動させて(図40(g))、ズボンTがウェスト部分から裾に向かって鉛直に垂れ下がる状態する(図40(h))。この状態から、他方の保持機構310Bを載置板402の反対側(矢印Y2方向)に移動させ、載置板402にいったんズボンTを仮掛けする(図41(i))。次に、載置板402上に仮置きされたズボンTの両端部を保持機構310A及び310Bで保持して、載置板402の反対側(矢印Y2方向)に移動させ、ズボンTの長手方向中央(ウェストから裾までの長さの半分)が載置板402にくるようにする(図41(j))。次に、載置装置制御部906は、載置板402を水平方向に回動させて、挟持装置700の近傍まで水平方向に移動させる(図42(k))。載置板402が近づいてくると、挟持装置700の上側挟持板702と下側挟持板704とが互いに近接する方向に回動する(図42(k))。これにより、載置板402から垂れ下がったズボンTのウェスト部が下側挟持板704により持ち上げられ、折りたたみが終了する。
なお、上記例では、ズボンTをウェスト部分の中央部と股部分とを結ぶ直線で半分に折り畳む(ズボンTの裾どうしを重ねる)ために、載置板402を利用している(図38(c)乃至図39(f))がこれに限られるものではない。例えば、図75に示すとおり、保持機構310A及び310Bが、ズボンTの両裾を保持した状態において(図75(a))、保持機構310A及び310Bが近接する(両者の幅方向(X方向)及び高さ方向(Z方向)の位置が一致し、前後方向(Y方向)に僅かに離間する位置になる)ように、一方を他方に対して旋回させて、ズボンTの両裾を合わせるようにしてもよい(図75(b))。これにより折り畳み工程を大幅に簡略化できる。
(T)先の実施形態に係る処理装置1では、折り畳み工程(図14)に入った後は、認識工程(図13)で認識された被処理物Tの種類は正しいという前提で、当該認識された被処理物Tの種類に応じた折り畳み動作を継続する。しかしながら、認識工程(図13)で被処理物Tが誤認識され、この誤った認識のもとで折り畳み動作が行われてしまうこともあり得る(例えば、被処理物Tが本当はズボンであるところ、誤って、Tシャツであると認識し、ズボンにTシャツのたたみ方を適用してしまう等)。そこで、折り畳み工程中又は折り畳み工程後に撮像装置500において被処理物Tの画像データを取得し、当該画像データに基づいて、被処理物Tがその種類の規定の折り畳み形状から乖離しているか否かを検出してもよい。乖離していると検出された場合は、被処理物Tの種類に誤認識があったと判別し、折り畳み動作を中断して、保持機構310A、310Bにより被処理物Tを保持しなおして認識工程をやり直すようにしてもよいし、又は、被処理物Tは「折りたたみ不能」と判別し、折り畳み工程を中断して保持機構310A、310Bにより被処理物Tを、処理装置1内の所定の場所、例えば、専用の収容箱(当該収容箱の例については、以下「(Y)」で詳述する「被処理物収納部H2」を参照)に収容するようにしてもよい。
また例えば、認識工程(図13)で認識された被処理物Tの種類が正しくとも、被処理物Tのサイズが大きかったり形状がイレギュラーであった場合等は折畳工程(図14)での折り畳みが不十分になってしまったり、また折り畳みの最中に載置板402から被処理物Tの一部がずれ落ちてしまったりすることも考えられる。そこで、折り畳み工程中又は工程後に撮像装置500において被処理物Tの画像データを取得し、当該画像データに基づいて、制御装置900により被処理物Tが規定の折り畳み形状のとおり折り畳まれているか否かを検出してもよい。例えば、制御装置900は、折り畳み完了時における被処理物Tが取るべき所望の輪郭形状(例えば矩形)と、被処理物Tの実際の輪郭形状(例えば当該矩形からはみ出している部分(例えば袖部)がある)とを比べ、折り畳みが完了しているか否かを検知する。折畳みが完了していないと判断された場合には、追加の折り畳み動作(例えば、はみ出した袖部を載置板402の縁部に引っ掛ける等)を行っても良いし、折り畳み工程を最初からやり直すようにしてもよい。
(U)先の実施形態に係る処理装置1では、TシャツTの袖口の両端が保持機構310A、310Bにより保持された状態で(図19(j))、種類認識部914は被処理物Tの種類が「Tシャツ」であると認識する。言い換えれば、被処理物Tの種類が「Tシャツ」の場合、TシャツTの袖口の両端が保持機構310A、310Bにより保持されるまで、端点の持ち替え動作が繰り返される。しかしながら、保持の状態によっては、何度持ち替えを繰り返してもTシャツTの袖口の両端を保持機構310A、310Bにより保持する状態に持っていくことができない、又は、できたとしても非常に多くの回数を要する場合がある。被処理物Tの保持状態がこのようなデットロック状態になったことを認識した場合(例えば、撮像装置500による画像データが所定の形状になったことに基づき認識する/又は被処理物Tの最下点の持ち替え回数が所定回数以上になったことに基づき認識する等)、保持装置制御部904は、保持機構310A、310B双方から被処理物Tを離して搬送コンベア204に落とす又は載置板402に置いた上で、再度保持機構310A(310B)により最下点を掴む動作を開始するようにしても良い。又は、被処理物Tは「展開不能」と判別し、認識工程を中断して保持機構310A、310Bにより被処理物Tを、処理装置1内の所定の場所、例えば、専用の収容箱(当該収容箱の例については、以下「(Y)」で詳述する「被処理物収納部H2」を参照)に収容するようにしてもよい。
一例として、図43及び図44を用いて、被処理物TとしてのTシャツTが横向きに保持された状態を認識して、デットロック状態を解消する方法を説明する。
第1点P及び第1端点P1を保持した状態(図43(a))から、最下点(保持機構310A、310Bによる被処理物Tの保持部分を結ぶ直線から最も離れた端点)の持ち替えを繰り返していくと(図43(b))、TシャツTが横向きに保持される場合がある(図44(c))。保持装置制御部904は、撮像装置500から入力されるTシャツTの画像データに基づき、TシャツTが横向きに保持されている状態であると認識すると、デットロック状態になったと判定する(このまま通常の持ち替えを続けても、TシャツTの袖口の両端が保持機構310A、310Bにより保持された状態にならない)。この場合、保持装置制御部904は、保持機構310A、310Bを載置板402に向かって水平方向(Y2方向)に移動させた上で、TシャツTの把持を解除し、TシャツTを載置板402に垂れ下げる(図44(d))。この状態において、保持装置制御部904は、撮像装置500から入力される画像データに基づきTシャツTのZ方向最下点にある端部(本例の場合はTシャツTの一方の袖口)を検出し、一方の保持機構310Aで当該端部を把持する。以降通常の最下点を掴む動作を繰り返すことで(本例の場合は、TシャツTの一方の袖口を掴んでいるので、この後2回の動作により)、又は、本例の場合は既に被処理物Tの種類が「Tシャツ」であると認識されているので、直接TシャツTの他方の袖口を掴みにいくことで(この場合はこの後一回の動作により)、TシャツTの袖口の両端が保持機構310A、310Bにより保持される。これにより、デットロック状態を解消することができ、折り畳み工程までの処理を早めることができる。
(V)先の実施形態に係る処理装置1では、TシャツTの袖口の両端が保持機構310A、310Bにより保持されることにより(図19(j))、種類認識部914が、被処理物Tの種類が「Tシャツ」であると認識すると、そのまま連続してTシャツの折り畳み工程(図14、図19(k))が開始される。しかしながら、被処理物Tの種類の認識タイミング、認識のための被処理物Tの形状はこれに限られるものではない。例えば、被処理物Tの展開前(例えば受入搬送工程中)や展開中(折り畳み工程を開始するための形状になる前)に、種類認識部914が被処理物Tの種類を認識し、被処理物Tが折り畳み動作を開始するための形状(TシャツTの例でいえば、TシャツTの袖口の両端が保持機構310A、310Bにより保持される図19(j)の状態)となるように、認識した被処理物Tの種類に応じて展開動作を行うようにしてもよい。被処理物Tの展開前や展開中に早期に被処理物Tを認識する方法としては、例えば、ある特定の被処理物Tの外観上の特徴(特定の色(例えば「黄色」)、特定の文字(例えば「ABC」等)、特定の柄やマーク(例えば「ボーダ柄」)等)とその種類とを関連付けるデータを予め種類認識部914に保持しておき、当該外観上の特徴が検知された時点で種類認識部914が被処理物の種類を認識するようにしてもよい。被処理物Tの展開の開始時又は展開中に被処理物Tの種類を判別し、被処理物Tの種類に応じた最適な展開動作を行うので、折り畳み工程までの処理を早めることができる。また種類を一つに特定までせずとも、被処理物Tの展開前や展開中に、被処理物Tの外観上の特徴(例えば長い袖や長い裾等)が検知された時点で種類認識部914が被処理物の種類をそのような特徴をもつものに絞りこむようにしてもよい。
一例として、図45乃至図47を用いて、被処理物の展開途中に被処理物Tが「タオル」であることを認識し、被処理物Tの展開・折り畳みを行う方法を説明する。
被処理物Tの種類が「タオル」の場合、最下点(保持機構310A、310Bによる被処理物Tの保持部分を結ぶ直線から最も離れた端点)の持ち替えを繰り返していくと、図45(a)に示すように、被処理物Tの幅方向(X方向)両端部から中央部分に向けて下方向(Z方向)に垂れ下がった特徴的な形状が現れる。種類認識部914は、撮像装置500から得られる画像データに基づいて、この段階で被処理物Tが「タオル」であると認識する。そして、保持装置制御部904は、被処理物Tが折り畳み動作を開始するのに最適な形状(本例においては、図46(d)の状態)となるように、「タオル」用に予め定められた以下の展開動作を行う。
はじめに、他方の保持機構310Bを載置板402に向けて水平方向(Y2方向)に移動させた上で、被処理物Tの把持を解除することで、被処理物Tであるタオルの長手方向一端部を載置板402に垂れ下げる(図45(b))。次に、一方の保持機構310Aをその把持状態を維持したまま載置板402の幅方向中央方向(X2方向)に向けて移動させ(図45(b))、これにより、被処理物Tであるタオルの長手方向他端部が最下点となるようにする(図46(c))。この他端部を他方の保持機構310Bで把持することにより、被処理物Tを、折り畳動作を開始するための形状にする(図46(d))。このように被処理物Tの種類(この場合はタオル)を判別するとその種類に応じた最適な展開動作を行うので、折り畳み工程までの処理を早めることができる。
なお、被処理物Tが「タオル」である場合の折り畳み工程は、次のとおりである。図46(d)に示した状態において、制御装置900は、撮像装置500から得られる画像データに基づき、被処理物Tであるタオルの長さ(長手方向の大きさ)を算出し、何回の折り畳みが必要かを算定する(本例の場合は例えば2回と算定される)。次に、載置装置制御部906は、載置板402を回動させて鉛直状態とする。この状態で、保持装置制御部904は、垂れ下がった被処理物Tの長手方向の中央が載置板402の上縁部に載るように、保持機構310A、310Bを載置板に向かって移動させて把持をいったん解除し、その上で再度載置板402上に位置する被処理物Tの両端部を保持機構310A、310Bで把持する(図46(e))。この状態では被処理物Tの折り畳みが足りないので、もう一度折り畳みを折り返す。すなわち、保持装置制御部904は、垂れ下がった被処理物Tの長手方向の中央が載置板402の上縁部に載るように保持機構310A、310Bを載置板に向かって移動させ、把持を解除する(図47(f))。このとき、被処理物Tであるタオルは、長手方向に4つ折りにされている。次に、載置装置制御部906は、載置板402を水平方向に回動させ(図47(g))、挟持装置700の近傍まで水平方向に移動させる(図47(g))。載置板402が近づいてくると、挟持装置制御部910は、挟持装置700の上側挟持板702と下側挟持板704とが互いに近接する方向に回動させる(図47(g))。これにより、載置板402から垂れ下がった被処理物Tの端部が下側挟持板704により持ち上げられ、折りたたみが終了する。
(W)先の実施形態においては、処理装置1は、内部に投入された被処理物Tを展開して種類を認識し、認識した種類に応じて折り畳みを行うが、被処理物Tによっては、種類の認識ができない、折りたたみが行えないことも想定される。このような場合は、制御装置900は、これらの被処理物Tを「認識不能」「折り畳み不能」と判別して、認識工程、折り畳み工程を中断して保持機構310A、310Bにより被処理物Tを、処理装置1内の所定の場所、例えば、専用の収容箱(当該収容箱の例については、以下「(Y)」で詳述する「被処理物収納部H2」を参照)に収容して、他の被処理物Tと分別するようにしてもよい。
例えば、制御装置900は、認識工程において、被処理物Tの最下点の持ち替えが所定の閾値を超えても依然として被処理物Tの認識ができない場合は、被処理物Tを「認識不能」と判別してもよい。例えば、制御装置900に被処理物Tの種類として、「Tシャツ」、「ズボン」、「タオル」、「スカート」のパターンのみが記憶されている場合に、被処理物Tとして「靴下」が投入された場合は、認識工程において複数回の最下点の展開動作を繰り返しても、予め記憶されている「Tシャツ」、「ズボン」、「タオル」、「スカート」の特徴に合致しないので、所定の閾値を超えても被処理物Tの認識がされない。このような場合は、当該被処理物T(靴下)は、「認識不能」なものとして、専用の収容箱に収容される。
また被処理物Tの種類が認識できるかできないかにかかわらず、処理装置1において折り畳めないことが明らかなものであれば(例えば、予め定められた被処理物Tの折り畳み可能範囲(長さ、重さ、形状、材質等で規定)を超えていると認識された場合等、より具体的には、大きなシーツや洗濯ネットが投入された場合等)次の折り畳み工程に移る前に「認識不能」として、専用の収容箱に収容される。
また例えば、制御装置900は、折り畳み工程において、折りたたみに必要な被処理物Tの端点が認識できない場合や、被処理物Tが載置板402上に安定して保持できないと判定した場合(例えば、被処理物Tのサイズが当該種類における所定の折り畳み許容サイズを超えて大きい等)は、被処理物Tを「折り畳み不能」と判別し、専用の収容箱に収容してもよい。
(X)先の実施形態においては、載置板402を備える載置装置400について説明したが、載置装置は、被処理物Tを載置するための複数の点、一本又は複数の直線又は曲線、平面、曲面又は凹凸面等を提供する載置体を備えても良い。このような載置体としては、例えば、一本又は複数の糸状部材(紐、針金等)、一本又は複数の棒状部材又は筒状部材(例えば、図8において載置板402を取り除き、回転軸412を載置板402の替わりに用いる等)、くし状部材(くしの複数の歯が複数の載置点を構成する)、球体や半球体(球面を載置面として用いることで被処理物Tのシワを伸ばす効果がある)等を用いることができる。なお、上記(Q)で述べた載置板402の構成(材質や摩擦抵抗、R加工、開口部等)は、載置体にも同様に適宜適用できる。
このような載置体の具体例を以下に示す。例えば、図48及び図49に示すように、載置体として、一本の紐からなる載置体402Aを用いてもよい。両図に示すように、載置体402Aは、載置装置(図示せず)により、処理装置1の幅方向(矢印X方向)に懸架され、かつ、上下(矢印Z方向)及び前後(矢印Y方向)に移動可能に保持されている。載置体402Aは、載置板402の替わりに、認識処理、折り畳み処理等に利用可能である。
図48(a)及び(b)は、載置体402Aを用いた認識工程の一部を示す図である。同図に示すように、被処理物Tと載置体402Aとが直線上に当接することで、図18(h)及び(i)に示す載置板402を用いた工程(被処理物Tと載置板402の側縁とが同様に直線上に当接する)と実質的に同様の動作で、認識処理を行うことができる。一方、載置板402を用いた場合とは異なる利点もある。すなわち、載置体402Aは、一本の紐であり、載置装置にその両端を保持されて懸架されているので、載置装置の保持を緩めることで、紐を緩ませることができる。これにより、例えば、載置する被処理物Tの位置を全体に下にずらし、被処理物Tの最下点をずらすことができる。
図49(a)乃至(c)は、載置体402Aを用いた折り畳み工程の一部を示す図である。一本の紐からなる載置体402Aでは、載置板402にあるような「平面」が存在しないので、先の実施形態において説明した載置板402の「平面」を使う折り畳み工程(例えば、図22(t)で説明した工程)とは異なる折り方が必要とされる。例えば、次のような折り方が考えられる。
図49(a)は、第1折り線B1にてTシャツTを2つ折りにする工程(当該工程については、図21(p)で示したと同様)の後工程を示している。保持機構310A、310Bは、被処理物Tの第3折り線B4が載置体402A上に位置するように、被処理物Tを載置体402A上に保持している。ここで、第3折り線B4は、先の実施形態で説明した第1折り線B2及び第2折り線B3(図21(q)参照)に比べて、TシャツTの中央寄りに位置する。図49(a)に示すように、第3折り線B4は、被処理物Tを載置体402Aに垂れ下げた状態において、TシャツTの一方の袖の端縁B5と、TシャツTの胴体部の他方の端縁B7とがほぼ同一線上になるように位置決めされている。
次に、図49(b)に示すように、保持機構310A、310Bは、被処理物Tを第3折り線B4にて保持しつつ、TシャツTの胴体部の一方の端縁B6と載置体402Aとがほぼ同一の高さになるまで持ち上げる。このとき、同時に、保持機構310A、310B及び/又は載置体402Aを前後方向(矢印Y方向)に移動させて、載置体402Aを被処理物Tよりも手前側(矢印Y1方向)に位置させる。この段階で、保持機構310A、310Bを載置体402Aの手前下側方向に移動させる。これにより、一方の袖を載置体402Aに引っ掛けつつ、被処理物Tに、第4の折り線B8をつける(図49(c))。これにより、一本の紐である載置体402Aを用いても、被処理物Tの折り畳みを行うことができる。
上記折り畳み工程以降の処理は、先の実施形態で説明したと同様に行ってもよい。すなわち、挟持装置700にて被処理物Tを挟持しつつ、載置体402Aを挟持装置700から離間させ、搬送処理を行う。なお、載置体402Aを離間させる方法としては、載置体402Aと挟持装置700とを相対移動させる以外にも、載置体402Aが紐であることを利用して、次のようにすることも可能である。すなわち、一本の紐である載置体402Aの一端を載置装置に着脱自在に装着し、折り畳み完了後に、当該載置体402Aの一端を載置装置から外しつつ、他端を引っ張ることで、挟持装置700から載置体402Aを「引き抜く」ようにしてもよい(引きぬかれた載置体402Aの一端は、この後、再度載置装置に装着される)。なお、上記折り畳み工程以降の処理は、挟持装置700を用いなくても構わない。すなわち、被処理物Tの両端を保持機構310A、310Bにて保持した状態で、載置体402Aを被処理物Tから上記のとおり「引き抜く」ようにし、その後、保持機構310A、310Bにて被処理物Tを被処理物受入箱Rに直接搬送するようにしてもよい。
また例えば、図64に示すように、載置体として、2本の紐からなる載置体402Bを用いてもよい。同図に示すように、載置体402Bは、載置装置(図示せず)により、処理装置1の幅方向(矢印X方向)に懸架され、かつ、それぞれ上下(矢印Z方向)及び前後(矢印Y方向)に移動可能に保持されている。載置体402Bは、載置板402に替えて認識処理、折り畳み処理等に利用可能である。
載置体402Bを構成する2本の紐は互いに平行な状態を保ちつつ相対移動可能である。例えば、一方の紐を他方の紐を軸として相対的に回転移動させることで、載置体402Bの載置面(2本の紐を含む平面であって、一方の紐と他方の紐との間で形成される面)を、垂直(図64(a))、傾斜(図64(b))又は水平(図64(c))に変化させることができる。すなわち、載置体402Bは、載置板402と実質的に同様の載置面を構成することができる。また例えば、載置体402Bは一方の紐と他方の紐との間隔を変化させることで、載置面の面積を変更させることができる。
また例えば、図65(a)及び(b)に示すように、載置体として、曲面状の縁部を有する載置体402C、402Dを用いてもよい。この載置体402C、402Dは、一方の縁部が緩やかに湾曲している(より具体的には、載置体402Cは外側に膨出するように湾曲し、載置体402Dは内側に凹むように湾曲している)ことを除き、載置板402と同一である。載置体402C、402Dは、縁部が緩やかに湾曲しているので被処理物Tを掛けやすくなる。折り畳みの際には、他方の直線状の縁部を用いても良いが、この湾曲した縁部を用いても構わない。同図に示すように、持ち上げる前の被処理物Tが緩やかに湾曲していても、保持機構310A、310Bで被処理物Tの幅方向両端を保持しつつ、保持機構310A、310Bを同じ高さ(Z方向位置)で持ち上げれば、被処理物Tの折り線を直線とすることができるからである。
なお、載置装置400は、以上説明したような載置体を複数備えても良い。このとき、複数の載置体は、形状、大きさ又は材質等が同一であってもよいし異なっていてもよい。載置装置400は、折り畳み等の処理状態に応じて又は被処理物Tの態様に応じて複数の載置体を各々移動、変形、収容等させて適宜使い分けるようにしてもよい。
(Y)処理装置1の各部材の配置、可動範囲等についても、特に限定はなく、本発明の要旨を逸脱しない範囲において種々の配置、構造が可能である。
例えば、図50(a)(b)に模式的に示す処置装置1Aは、投入部H1、非処理物収納部H2、処理物収納部H3を備え、ユーザが被処理物Tの投入と取り出しとを別々の位置で行うことができるように構成されている。
投入部H1は、処理装置1Aの最下部に配置される引き戸タイプの箱状部材で、図50(b)の矢印Aで示すように、処理装置1Aの前方に摺動し、被処理物を受け入れるようになっている。そのためユーザは、被処理物を上から落とすだけでの簡単な動作で被処理物を投入部H1に投入することができる。
非処理物収納部H2は、投入部H1に並んで配置されている。非処理物収納部H2は、制御装置900により「認識不能」「折り畳み不能」等と判別された被処理物Tを収容する専用の箱状部材で、引き戸タイプで前方に摺動する。これにより、ユーザは、折り畳みがされていない被処理物Tを、折り畳みがされた被処理物Tとは分けて回収することができるようになり、ユーザの利便性が向上する。
処理物収納部H3は、投入部H1よりも上方に配置され、折り畳みがされた被処理物Tが載置される箱状部材である。処理物収納部H3は、被処理物Tの認識工程、折り畳み工程中は、図50(b)の矢印Bで示すように、処理装置1Aの折り畳みユニット(保持装置300A,300B、載置装置400、挟持装置700等)の可動域Jから外れるように、処理装置1A最上部に退避されている。処理物収納部H3は、被処理物Tの折り畳み後の搬送工程において、処理装置1Aの中央付近まで下降し、折り畳み後の被処理物Tが載置される。これにより、ユーザは、処理物収納部H3の前方にある取り出し扉Iを開けて、処理物収納部H3にアクセス可能である。このとき、処理物収納部H3は処理装置1Aの中央付近に位置するので、ユーザは、折り畳み後の被処理物Tを、屈んだりすることなく容易に取り出すことができる。なお、処理物収納部H3は、複数の箱状部材で構成したり、内側に複数の仕切りを設けたりする等により、互いに仕切られた複数の空間を有するようにしてもよい。この場合、被処理物Tの種類や属性によって、被処理物Tを仕分けした上で収容することができるようになる。これにより、異なる種類の被処理物Tが一つの空間に積層される場合に比べて被処理物Tの型崩れ等を減少させることができ、また処理装置1Aから取り出した後の仕分けも不要になるので、ユーザの利便性が一層向上する。
また例えば、先の実施形態においては、載置装置400は、回転機構406と前後方向移動機構408を備えることにより、載置板402を回転及び前後方向(図8のY方向)に移動させることができるが、これに限られない。例えば、載置装置400は、幅方向移動機構や上下方向移動機構をさらに備え、載置板402を幅方向(図8のX方向)や上下方向(図8のZ方向)に移動させるようにしてもよい。また、載置板402が回転機構406のみならず他の回転軸に対しても回動するようにしてもよい。例えば、載置板402を前後方向(図8のY方向)を軸に回動させれば、載置板402は前後方向(図8のY方向)を中心に傾くので、載置板402に被処理物Tを載せた際にこの傾斜した方向に被処理物Tを移動させやすくなる。これにより、例えば、図21(q)を用いて説明した被処理物Tのスライド動作(被処理物Tを載置板402上で左方向(図21(q)の矢印X2方向)に沿わせる動作)がしやすくなる。また例えば、上記のような回転機構や移動機構を備えず、載置板402を処理装置1内で固定するようにしてもよい。
(Z)処理装置1における被処理物Tの折り畳み方法も上記折り畳み工程において述べた方法に限定されるものではない。
例えば、先の実施形態においては、図21(p)の状態から図21(q)の状態までの移行の際、保持機構310Bは、保持機構310Aを中心とする円周上を、保持機構310Aと保持機構310Bとを結ぶ線分が載置板402の幅方向(矢印X方向)に対して垂直になるまで移動し、その後、両保持機構310A、310Bは、左方向(矢印X2方向)に移動しつつ、下方に移動する。この移動を、例えば図76で示すように変更してもよい。
まず、図76(a)で示すように、載置板402を水平位置まで回動させるとともに、被処理物Tを保持する両保持機構310A、310Bが載置板402よりも奥側(矢印Y1側)に位置するように、保持機構310A、310B又は載置板402を移動させる。この状態で、保持機構310Aと保持機構310Bとを結ぶ線分が載置板402の幅方向(矢印X方向)に対して約45度になるように、保持機構310Bを、保持機構310Aを中心とする円周上で移動させる(図76(b))。
次に、被処理物Tの襟側が水平にした載置板402の上面に載置されるように、両保持機構310A、310B及び載置板402を相対移動させる。このとき、被処理物Tの一部は、載置板402の第1縁線C1に沿わせるように移動させると、シワが抑制される。
そして、被処理物Tの第1折り線B2上の襟側端部D6が、載置板402の第1縁線C1に当接した段階(図76(c))で、次の移動に入る。すなわち、被処理物Tの第1折り線B2が載置板402の第1縁線C1に重なるように、保持機構310Aと保持機構310Bとを、襟側端部D6を中心として回動させつつ載置板302に向かって下方に移動させる。これにより、図21(q)に示す状態とすることができる。
この方法によれば、被処理物Tの第1折り線B2の襟側端部D6を載置板402上で当接させた状態で、この襟側端部D6を中心として被処理物Tを回動させつつ、載置板402上に載置させるので、被処理物Tの移動によるズレを抑制することができ、被処理物Tの第1折り線B2を載置板402の第1縁線C1により適切に位置合わせすることができる。
例えば、先の実施形態においては、認識工程にて制御装置900が、被処理物がTシャツであると識別した場合、折り畳み工程にてその種類(Tシャツ)に対応する一つの折り方を適用する例を示したが、これに限られない。例えば、制御装置900は、一つの種類の被処理物T(例えばTシャツ)に対して複数の折り方を記憶し、予め指定された又は都度指定されるユーザの好みに応じて、同じ種類の被処理物Tであっても折り方を替えるようにしてもよい。例えば図66に示すように、折畳工程において、制御装置900は、ユーザの選択に基づいて、先の実施形態と同様に被処理物T(Tシャツ)を幅方向で3つ折りにしてもよいし(図66(c)参照)、又は、被処理物Tを襟中心に幅方向で2つ折りにしてもよい(図66(d)及び(e)参照)。
また例えば、次のような折り畳み方法も可能である。図67(a)は、第1折り線B1にてTシャツTを2つ折りにする工程(当該工程については、図21(p)で示したと同様)の後工程を示している。保持機構310A、310Bは、被処理物T(ここではTシャツT等の袖のある上着を対象とする。なお、袖は長袖でもよい)の第5折り線B9が載置板402の第1縁線C1上に位置するように、被処理物Tを載置板402上に保持している。
次に保持機構310A、310Bは、被処理物Tを第5折り線B9を挟むようにして保持しつつ、被処理物Tを吊り上げる。同時に載置板402は順方向回転して水平状態となる(図67(b))。この状態で、保持機構310A、310Bは、被処理物Tの第6折り線B10が載置板402の第2縁線C2に沿うように、被処理物Tを載置板402上に載置する(図68(c))。
ここで、第5折り線B9及び第6折り線B10は、次の2つの条件を満たすように設定されている。第1に、図67(b)の点線で示すように、第6折り線B10は、被処理物Tが第5折り線B9で折り畳まれた状態において、第5折り線B9から近い方の一方の袖部D4が第6折り線B10で分断されるように設定される。第2に、図68(c)に示すように、第5折り線B9及び第6折り線B10は、被処理物Tの幅方向中央から等距離に位置するように設定される。
このように第5折り線B9及び第6折り線B10を設定することで、図68(c)に示すように被処理物Tを載置板402上に載置した状態において、被処理物Tの2つの袖部D4及びD5はいずれも載置板402の第2縁線C2から垂れ下がっている。そのため、次のステップにおいて載置板402を順方向回転させ鉛直状態とした際に(図68(d))、被処理物Tの袖部D4及びD5を第2縁線C2に引っ掛けることができる。すなわち、鉛直方向下側に配置される被処理物Tの袖部D4を載置板402の第2縁線C2にて保持できるので、先のステップ(図67(a))でつけた第5折り線B9を崩れさせずに維持することができる。
次に保持機構310A、310Bは、被処理物Tを第6折り線B10を挟むようにして保持しつつ、被処理物Tを吊り上げる。同時に載置板402は逆方向回転して水平状態となる。保持機構310A、310Bは、続いて被処理物Tを第6折り線B10にて保持しつつ、水平状態の載置板402上に載置し(図68(e))、折畳工程を終了する。
この折り畳み方法によれば、第2縁線C2を用いる際に(図68(d))一方の袖D4が落ちることがないので、被処理物Tの袖の長さに関係なく、載置板402の第1縁線C1及び第2縁線C2を用いて2本の折り線(第5折り線B9及び第6折り線B10)をつけることができる。すなわち、載置板402と保持機構310A、310Bの動きのみで袖のある被処理物Tを幅方向に3つ折りにすることができる。
また先の実施形態においては、この3つ折りの最後の動作を挟持装置700により行っていたが(図22(u)及び図23)、この折り畳み方法によれば、挟持装置700を用いなくとも被処理物Tを折り畳むことができる。そこで、被処理物Tを載置板402から被処理物受入箱Rに直接搬送するようにすれば、処理装置から挟持装置700自体をなくすことができる。このような処理装置の具体例については、以下「III.第3の処理装置」で詳述する。
また例えば、折り畳み工程では被処理物Tの種類(例えばTシャツ)に対応する折り方を被処理物Tに適用するが、折り畳み工程の開始の段階で、被処理物Tが当該折り方を適用するのに適した状態で保持機構310A、310Bに保持又は載置板402に載置されているかを検知するようにしてもよい。
より具体的には、折り畳み工程を実施するためには、保持機構310A、310Bが、被処理物Tの中心線(短手方向の中心線でも長手方向の中心線でもよい)を境にして被処理物Tの両側を把持しているようにすることが好ましく、より好ましくは、保持機構310A、310Bが被処理物Tを中心線に対して被処理物Tを左右対称に把持しているのが望ましい。そこで、例えば、折り畳み工程開始の段階で、撮像装置500によって被処理物Tを撮像し、衣服の下端や側端の傾きから被処理物Tが保持機構310A、310Bに左右対称位置で水平方向に傾くことなく保持されているか否かを検知する。そして、被処理物Tが左右対称に保持されておらず水平方向に傾いていると認識された場合は、保持機構310A、310Bの一方又は他方を移動させたり把持しなおしたりすることで、被処理物Tを適切な保持状態に補正する。これにより、被処理物Tが傾いて折り畳まれたりするようなことを抑制でき、折り畳みの精度を向上させることができる。同様に被処理物Tが前後逆に保持されていないか等検知して、折り畳み開始時に補正するようにしてもよい。
また例えば、保持機構310A、310B等の駆動スピードを変更可能なものとすることで、折り畳みのスピードを、被処理物Tに応じて(被処理物Tの種類、材質、ユーザの指定)、運転の時間帯に応じて(騒音を避けるべき夜間か、騒音が許容される昼間か等)、又は、仕上がりレベルに応じて(お急ぎコースか標準コースか丁寧コースか等)適宜変更できるようにしてもよい。
また例えば、折り畳み工程において、載置板402の上側の縁線上に載置した被処理物Tの折り線がずれないように、保持機構310A、310Bは、被処理物Tを極力下方(例えば、載置板402の上側縁線C1よりも下方)で被処理物Tの保持の開放をするようにしてもよい。例えば、先の実施形態においては、保持機構310A及び310Bによる第1点P及び第2端点P2の開放(図19(k)の状態から図19(l)の状態への移行)の際は、両保持機構が扉方向(矢印Y2方向)に水平移動するのみであったが、この際に、保持機構310A、310Bを下方(Z方向)にも移動させ、載置板402の上側縁線C1よりも下方において、第1点P及び第2端点P2の保持を開放するようにしてもよい。これにより、被処理物T(TシャツTの裾側)の落下距離が短くなるので、保持の開放による勢いで折り線(横折り線B1)がずれてしまうことを抑制できる。
II.第2の処理装置
次に、乾燥機等で乾燥等された被処理物Tを、当該乾燥機等から取り出して折り畳み等する装置について、処理装置1B及びその変形例を用いて説明する。
上述した処理装置1は、ユーザにより装置内(受入搬送装置200)に投入された被処理物を折り畳み等する。これに対し、処理装置1Bは、乾燥機等を筐体内に一体に備え、保持装置が当該乾燥機等から被処理物Tを取り出して折り畳み等する点で相違する。以下では、この相違点を中心に説明する。なお、処理装置1Bは、折り畳み等の機能、構成については、特に断らない限り処理装置1及び/又はその変形例と同様であり、同一の符号を付して、その説明は省略する。
<処理装置1Bの全体構成>
処理装置1Bは、図51に示すように、筐体110内に、概略、保持装置300A、300B、300C、載置装置400、撮像装置500、500B、洗濯乾燥機600、収納部K、挟持装置700、搬送装置800(図示せず)及び制御装置900B(図示せず)等を備えている。
以下、各構成について説明する。なお、保持装置300A、300B、撮像装置500、挟持装置700、搬送装置800は、処理装置1及び/又はその変形例と同一又は同様の構成を採用可能であり、説明は省略する。なお、図51において、紙面に垂直な方向(X方向)を幅方向、Y方向を奥行き方向、Z方向を高さ方向とする。
<筐体110>
筐体110は、例えば、断熱性のあるステンレスや電磁場ノイズを遮断するCFRP等で構成され、略直方体形状である。筐体110は、投入扉112、取り出し扉113、給気ファン114、排気ファン116等を備えている。
投入扉112は、被処理物Tを洗濯乾燥機600に投入するための扉で、処理装置1Bの下側に設けられている。取り出し扉113は、収納部Kから被処理物Tを取り出すための扉である。取り出し扉113は、投入扉112より筐体110の上方で、処理装置1Bの高さ方向(Z方向)中央付近に設けられる(ユーザの下半身が投入扉112の位置に、上半身が取り出し扉113の位置にくる)。これにより、ユーザは、被処理物Tを洗濯乾燥機600に投入する際は屈む必要があるが、被処理物Tを取り出す際は、屈む必要がない。そのため、折り畳み等され、投入時よりも慎重な扱いをする必要がある被処理物Tを、取り出し扉113を介して容易に取り出すことができる。
なお、安全性の観点から、投入扉112及び取出扉113は、いずれも幼児等が簡単に侵入できない程度の大きさ、形状(例えば開口部分がボトルのように最も狭くなっている等)であることが好ましい。
給気ファン114は、洗濯乾燥機600よりも上方で筐体110の高さ方向(Z方向)中央付近に設けられている。給気ファン114は、開閉自在の通気口と、ファンと、ヒータとを備えており、外部の空気を筐体内に(必要に応じて暖めながら)取り込むようになっている。
排気ファン116は、給気ファン114よりも上方で筐体110の最上部付近に設けられている。排気ファン116は、開閉自在の通気口と、ファンとを備えており、筐体110外に空気を排出するようになっている。
給気ファン114、排気ファン116の駆動(通気口の開閉、ファンの回転、ヒータの駆動等)により、筐体の上方向に向かう空気の流れを作ることができる。給気ファン114及び排気ファン116の駆動は、制御装置900Bによって制御される。例えば、制御装置900Bは、被処理物Tを乾燥等又は折り畳み等の工程中は給気及び換気を行わず、筐体内に熱を溜め込んで筐体内の温度を高く維持(例えば60度)するようにしてもよい。また例えば、制御装置900Bは、折り畳み工程中に、給気ファン114、排気ファン116を駆動させて、筐体110内に気流を作り出すことで、被処理物Tのシワを取り除くようにしてもよい。
また給気ファン114及び排気ファン116の駆動により、筐体110内部の圧力を周囲環境に比べて高く保つようにしてもよい。これにより、筐体110内部のホコリやゴミ等を排出するとともに、外部からホコリやゴミ等が流入することを抑制でき、被処理物Tにホコリやゴミ等が付着することを抑制できる。
<保持装置300C>
保持装置300Cは、洗濯乾燥機600の洗濯槽602から被処理物Tを取り出す。また、取り出した被処理物Tを折り畳み等のために保持装置300A、300B又は載置板402まで搬送する。保持装置300Cは、保持機構310Cと移動機構320Cとを備える。
保持機構310Cは、保持機構310A及び310Bと同一の構成を採ることができ、被処理物Tの一部を保持する。
移動機構320Cは、移動機構320A、320Bと同様の移動機能(高さ方向、幅方向、奥行き方向への移動)を備えるとともに、さらに、保持装置300Cを突出させる方向(図51の矢印A1)に伸縮自在に構成され、かつ、保持機構310Cの一端が他端に対して回動自在(図51の矢印R1)に構成されている。これにより、保持機構310Cは、洗濯槽602内の少なくとも最下部602Aに移動可能である。
保持装置300Cは、保持装置300A、300Bと同様に、制御装置900Bと有線または無線により通信可能に接続されている。そして、この制御装置900Bにより、保持機構310Cおよび移動機構320Cの動作が制御される。
<撮像装置500B>
撮像装置500B(検知部)は、被処理物Tを洗濯槽602から取り出すために、被処理物Tの端点等を検出するための装置である。撮像装置500Bは、筐体110の投入扉112近傍に取り付けられており、その撮像可能範囲L1は、少なくとも洗濯槽602の最下部602Aを含む。なお、撮像装置500Bを筐体110に高さ又は幅方向に回動可能に取り付けて、撮像可能範囲L1を変更自在にし、洗濯槽602の上部奥602B又は扉下部602Cを含むようにしてもよい。
撮像装置500Bは、撮像装置500と同様にデジタルスチルカメラが使用されている。デジタルスチルカメラのレンズは、広角レンズを使用してもよい。この場合、撮像装置500Bの視野が広がり、撮像可能範囲L1が洗濯槽602の上部奥602B又は扉下部602Cを含むようにできるので、洗濯槽602内に残る被処理物Tの有無をより正確に検知できる。デジタルスチルカメラのイメージセンサとしては、例えば、モノクロ又はカラーのCCDを用いることができる。撮像装置500Bは、撮像可能範囲に光を照射する照明装置を備えていてもよい。
撮像装置500Bは、撮像装置500と同様に、制御装置900Bと有線または無線により通信可能に接続されている。そして、この制御装置900Bにより、撮像装置500Bの動作が制御される。
<洗濯乾燥機600>
洗濯乾燥機600は、洗濯槽602、摺動扉604等を備える。洗濯乾燥機600は、一又は複数の被処理物Tを洗濯、脱水及び乾燥する機能を備えたドラム式の洗濯乾燥装置である。
洗濯乾燥機600は、筐体110内において、保持装置300A、300B、撮像装置500、挟持装置700、搬送装置800等、被処理物を折り畳み等する装置(以下、「折り畳み装置」ともいう。)よりも下側に配置される。
洗濯乾燥機600の運転により得られる熱(例えば、乾燥動作により洗濯槽602内の暖められた空気)は、筐体110内の他の動作に利用される。被処理物Tの乾燥処理後、洗濯槽602の摺動扉604を開けると、内部の温まった空気は、筐体110の上方に向かって流れ、折り畳み装置が配置された筐体110の上部の温度が上昇する。これにより、折り畳み等の間にも筐体110内の温度をより高い状態に保ち、引き続き被処理物Tを乾燥させることができる。これにより、被処理物Tのシワを減らすことができる。ひいては被処理物Tを綺麗に折り畳むことができる。
洗濯槽602は、軸心が鉛直方向に対して所定の角度(例えば30度~60度)を有するように配置され、当該軸心を中心に回転することで、被処理物Tを回転させ上から下に落として乾燥等させるようになっている。そのため、乾燥後の洗濯槽602内の被処理物Tは、空気を多く含み、ふんわり感が出て(衣服が収縮せず)シワが少なくまた各被処理物T間にも隙間ができやすい。これにより、保持装置300Cが洗濯槽602から被処理物Tを取り出すことが容易になる。また、以降の折り畳み等の処理もしやすくなる。
摺動扉604は、洗濯槽602を密閉するための扉である。摺動扉604は、洗濯乾燥機600の側面に設けられているので、筐体110の側面に設けられた投入扉112と同じ面に設けることができる。これにより、ユーザは、筐体110の側面から被処理物Tを洗濯槽602内に投入することができる。
また、摺動扉604は、従来のドラム式の洗濯乾燥機とは異なり摺動式の開閉機構を備える。開く際は、摺動扉604は当該開閉機構により、洗濯槽602の軸心方向(図51の矢印B1)に向かってわずかに(摺動扉604の厚みよりやや大きい程度)突き出るように移動する。次に、摺動扉604は当該開閉機構により、洗濯乾燥機600本体の幅方向の側面に沿って下方(図51の矢印B2)に摺動する。閉じる際は逆の動作になる。摺動扉604が開いた際は洗濯乾燥機600本体に沿った形で配置されるため、開いた状態での洗濯乾燥機600の奥行き方向の大きさは、従来に比べて極めて小さい。言い換えれば、洗濯乾燥機600と、筐体110との間の距離を小さくすることができるので、筐体110の奥行きを小さくして処理装置1B全体をコンパクトにできる。同時に、投入扉112と摺動扉604との間の距離も小さくできるので、ユーザが被処理物Tを洗濯槽602に投入することもより容易になる。
洗濯乾燥機600は、制御装置900Bと有線または無線により通信可能に接続されている。そして、この制御装置900Bにより、洗濯乾燥機600の各種動作が制御される。
<収納部K>
収納部Kは、被処理物Tを収容するための収納部材であり、処理物収納部K1と非処理物収納部K2とを備える。
処理物収納部K1は、折り畳み等がされた被処理物Tが載置される箱状部材である。処理物収納部K1は、複数の箱状部材又は内側に複数の仕切りが設けられており、互いに仕切られた複数の空間を有する。そのため、被処理物Tの種類や属性によって、被処理物Tを仕分けした上で載置することができる。これにより、異なる種類の被処理物Tが一つの空間に積層される場合に比べて被処理物Tの型崩れ等を減少させることができ、また処理装置1Bから取り出した後の仕分けも不要になる。
非処理物収納部K2は、処理物収納部K1に幅方向に並んで配置されている。非処理物収納部K2は、制御装置900Bにより「乾燥不要」「乾燥不可」(後述する変形例(DD)参照)「認識不能」「折り畳み不能」(前述した変形例(W)参照)等と判別された被処理物Tを収容する。これにより、ユーザは、折り畳み等がされていない被処理物Tを、折り畳み等がされた被処理物Tとは分けて回収することができるようになる。
収納部K(処理物収納部K1及び非処理物収納部K2)は、移動機構を備え、筐体110の高さ方向に移動可能に構成されている。例えば、収納部Kは、被処理物Tの認識工程、折り畳み工程中は、上方(図51の矢印C1)に移動し、処理装置1Bの折り畳み装置の可動域から外れるように筐体110の最上部に退避される。そして、収納部Kは、被処理物Tの折り畳み後の搬送工程において、筐体110の取り出し扉113の位置まで下降し、折り畳み後の被処理物Tが載置される。そのためユーザは、取り出し扉113を開けて、収納部Kにアクセス可能である。なお、収納部K1と収納部K2とをそれぞれ独立して移動可能に構成してもよい。収納部Kは、制御装置900Bと有線または無線により通信可能に接続されその移動が制御される。
<制御装置900B>
制御装置900Bは、処理装置1Bにおける各部の制御を統括する。制御装置900Bは、主として、ROM、CPU、RAM、および、入出力インターフェイスから構成されている。ROMには、オペレーティングシステム、処理装置1Bの各部を制御するための制御プログラム、および、制御プログラムの実行に必要なデータが格納されている。また、CPUは、ROMに格納されている制御プログラムをRAMにロードしたり、ROMから直接実行したりするために設けられている。つまり、CPUが、制御プログラムを実行することにより、処理装置1Bの制御を行うことが可能となる。そして、CPUが処理したデータは、入出力インターフェイスを介して、処理装置1Bの各部(洗濯乾燥機600、保持装置300A、300B、保持装置300C等、載置装置400)へと送信され、CPUの処理に必要なデータは、処理装置1Bの各部(撮像装置500等)から入出力インターフェイスを介して受信される。
図52に示すとおり、制御装置900Bは、制御装置900と同様に、保持装置制御部904、載置装置制御部906、撮像装置制御部908、挟持装置制御部910、搬送装置制御部912、種類認識部914、長さ検出部915、垂れ長さ検出部916、第1点検出部920、第1端点検出部922、第2端点検出部924、第3端点検出部926、第4端点検出部928、第5端点検出部930、第6端点検出部932、第7端点検出部934、および、第8端点検出部936を備えている(受入搬入装置制御部902は備えない)。
制御装置900Bは、さらに、筐体制御部940、取り出し制御部950、洗濯乾燥機制御部960、収納部制御部970等を備えている。
筐体制御部940は、筐体110の各部の動作を制御する。具体的には、投入扉112及び取り出し扉113の開閉又は安全ロック等の制御、給気ファン114、排気ファン116の駆動(通気口の開閉、ファンの回転、ヒータの駆動等)の制御を行う。
取り出し制御部950は、保持装置300Cの保持機構310Cおよび移動機構320Cの動作を制御する。また、取り出し制御部950は、撮像装置500Bの動作を制御し、所望のタイミング、撮像範囲等でデジタル画像を取得する。
洗濯乾燥機制御部960は、洗濯乾燥機600における被処理物Tの洗濯、脱水、乾燥等の各種動作、被処理物Tの取り出し工程における洗濯槽602の回転、摺動扉604の開閉等を制御する。
収納部制御部970は、収納部K1と収納部K2の高さ方向の移動を制御する。
<被処理物Tの取り出し工程>
次に、洗濯乾燥機600の洗濯槽602内に投入され、洗濯、脱水、乾燥がされた被処理物Tを、洗濯槽602から取り出す工程について図53を用いて説明する。
洗濯乾燥機制御部960は、被処理物Tの乾燥処理が終了したと検知すると、摺動扉604を開ける(ステップS1)。これにより、撮像装置500Bが洗濯槽602の内部を撮像できる状態になる。この時洗濯槽602内の暖められた空気は、筐体110の上方に向かって流れ、筐体110の上部が暖められる。
次に、洗濯乾燥機制御部960は、洗濯槽602を回転させる(ステップS2)。この回転は、順方向でも逆方向でもまたはその双方を交互に行っても良く、またその回数も特に制限はない。この回転により、被処理物Tの位置、形状、各被処理物T間の配置を変化させる。例えば、洗濯槽602の上部奥602Bや、扉下部602C等に張り付く等している被処理物Tを、洗濯槽602の最下部に向かって移動させる。なお、このステップS2を省略して、ステップS1からステップS3に進むこともできる。
次に、撮像装置500Bは、洗濯槽602内の画像データを取得し、当該画像データを取り出し制御部950に送る。取り出し制御部950は、当該画像データに基づいて、被処理物Tの端点を検知する(ステップS3)。なお、被処理物Tが複数積層している場合は、例えば、洗濯槽602の開口に最も近い被処理物Tの端点を検知する。
被処理物Tの端点が検知されなかった場合(ステップS4:No)であって、かつ検知されなかった回数が所定回数N1(例えば3回)未満の場合(ステップS5:Yes)は、被処理物Tが実際は洗濯槽602内に存在するのに、洗濯槽602内の位置によって検知できてない可能性があるので、ステップS2に戻る。そして、洗濯乾燥機制御部960が、洗濯槽602を再度回転させる。これにより、被処理物Tの位置、形状、各被処理物T間の配置を変化させた後に、再度、画像データを取得する(ステップS3)。なお、再度洗濯槽602を回転させる際は、前回より回転数を多くしたり、回転方向を逆にしたり、回転速度を変化させたりしてもよい。
一方、被処理物Tの端点が検知されなかった場合(ステップS4:No)であって、かつ検知されなかった回数が所定回数N1(例えば3回)未満でない場合(ステップS5:No)、すなわち、複数回数洗濯槽602を回転させた後でも、依然として被処理物Tが検知できない場合は、被処理物Tは洗濯槽602内に残っていないと判断して取り出し工程を終了する。なお、洗濯乾燥機600が重量センサを有する場合は、この重量センサによって洗濯槽602内の重さを図ることで、当該判断を検証するようにしてもよい、又は、当該判断に替えてもよい。
被処理物Tの端点が検知された場合(ステップS4:Yes)は、取り出し制御部950は、保持装置300Cを洗濯槽602内の当該被処理物Tまで移動させ、保持機構310Cにより当該端点を保持させる(ステップS6)。
次に、取り出し制御部950は、保持機構310Cが被処理物Tの端点を保持しているかの保持判定を行う(ステップS7)。この保持判定は、上記処理装置1の変形例(D)で説明した保持判別部918と同様にすることができる。例えば、取り出し制御部950は、撮像装置500Bからの画像データを受け、保持制御を開始してから保持装置300Cが少し移動するまでの間における被処理物Tの外形上の差分をとることで、保持の有無を判定してもよい。また例えば、保持装置300Cに重量センサを設けて、取り出し制御部950は、保持制御を開始してからの重量の差分により、保持の有無を判定してもよい。
保持機構310Cが被処理物Tの端点を保持している場合(ステップS7:Yes)は、保持装置300Cを洗濯槽602から取り出し、被処理物Tを折り畳み装置に向けて搬送する。なお、被処理物Tを洗濯槽602から取り出すタイミングで、洗濯乾燥機制御部960は、洗濯槽602内の乾燥・送風機構を利用して被処理物Tに温風をあててもよい。これにより、被処理物Tのシワを減少させることができる。保持装置300Cにより搬送された被処理物Tは、載置装置400に載置される。なお、これに替えて、保持装置300Cは、被処理物Tを、保持装置300A、300Bに受け渡すようにしてもよいし、又は、収納部Kにいったん保管するようにしてもよい。
一方、保持機構310Cが被処理物Tの端点を保持してない場合(ステップS7:No)は、ステップS6に戻って、保持機構310Cにより被処理物Tの端点を再度保持させる。このとき、再度撮像装置500Bからの画像データを受け、当該被処理物Tの別の端点を保持するようにしてもよいし、他の被処理物Tの端点を保持するようにしてもよい。なお、よりつかみやすい被処理物Tの端点が現れるように、ステップS2まで戻って、洗濯槽602を再度回転させてもよい。再度洗濯槽602を回転させる際は、前回より回転数を多くしたり、回転方向を逆にしたり、回転速度を変化させたりしてもよい。
被処理物Tが洗濯槽602から取り出されると、洗濯乾燥機制御部960は、摺動扉604を閉じ(ステップS9)、取り出し工程が終了する。これにより、取り出された被処理物Tが折り畳み等されている間、洗濯槽602内に残された他の被処理物Tの温度が下がり収縮等してしまうことを抑制する。洗濯乾燥機制御部960は、この間、洗濯槽602を継続的又は間欠的に乾燥駆動させてもよい。
なお、例えば、洗濯槽602から被処理物Tを連続的に取り出し、例えば、収納部Kに保管してもよい。この場合は、摺動扉604を閉じずに(ステップS9を行わずに)、再びステップS2に戻って、次の被処理物Tの取り出しを行ってもよい。洗濯槽602から全ての被処理物Tを取り出せば、これらの被処理物Tを筐体110の上部で折り畳み等している間に、洗濯乾燥機600で別の被処理物Tを乾燥等することも可能である。
<変形例>
以上、処理装置1Bについて、図面に基づいて説明したが、具体的な構成は、これに限定されるものではない。処理装置1及びその変形例との組み合わせ、また、以下に例示するような各変形例及びこれらの組み合わせも可能である。なお、以下の変形例においては、説明に必要な構成を中心に説明及び図示し、その余の構成については省略する。
(AA)スチーム、アイロン、乾燥機能
例えば、折り畳み装置に、スチーム機能、アイロン機能、乾燥機能を設けてもよい。これら各機能は、個別に用いてもよいし、それぞれを適宜組み合わせて用いてもよい。
例えば、載置装置400にスチーム機能を設けてもよい。この場合、例えば、図54(a)に示すように、枠体404の内部から載置板402内部まで連通する流路を設け、載置板402に水(例えば洗濯乾燥機600に連通する蛇口等からの水)を供給し、この水を載置板402に設けたヒータで加熱し、載置板402に設けた複数の開口450から蒸気として出すようにしてもよい。図54(b)に示すように、載置した被処理物Tに蒸気をあてることで、被処理物Tのシワを解消ないし緩和することができる。
上記に替えて又は加えて、挟持装置700に同様のスチーム機能を設けてもよい。例えば、図55に示すように、挟持装置700から蒸気を出し(図55(a))、載置装置400上に載置された被処理物Tを挟みこむ(図55(b))ようにしてもよい。挟持装置700を押し付けながら蒸気をあてることができるので、シワをよりいっそう解消ないし緩和することができる。
上記に替えて又は加えて、保持装置300(300A、300B及び/又は300C)に同様のスチーム機能を設けてもよい。例えば、図56に示すように、保持装置300の一部(ここでは、例えば保持機構310の側面)から蒸気を出し、載置装置400に載置された被処理物Tの一部に蒸気をあてるようにしてもよい。保持装置300を移動させることで、場所を特定してピンポイントで蒸気をあてることができる。これにより、被処理物Tの例えばシワが多い部分のみに蒸気をあててシワを解消ないし緩和することができる。
また例えば、載置装置400にアイロン機能を設けてもよい。この場合、例えば、図57(a)に示すように、載置板402の内部に電熱線460を蛇行状に設けて、この電熱線の通電を制御することで、載置板402表面を加熱できるようにしてもよい。図57(b)に示すように、加熱した載置板402上に被処理物Tを載置することで、被処理物Tのシワを解消ないし緩和することができる。なお、電熱線460に替えて、例えば、載置板402内部に蛇行した流路を設け、この流路に温度調整された高温の流体を流すようにしてもよい。アイロン機能は、挟持装置700又は保持装置300に同様に設けてもよい。
また例えば、洗濯槽602から被処理物Tを取り出した後に、筐体110内で被処理物Tを乾燥させてもよい。例えば、図58(a)で示すように、筐体110の給気ファン114A及び排気ファン116Aを設ける(給気ファン114及び排気ファン116と位置関係が逆になっている点を除き、給気ファン114及び排気ファン116と同一構成である)。そして、保持装置300A、300Bで被処理物Tを吊り下げた状態で、給気ファン114A及び排気ファン116Aを駆動させる。これにより筐体110の上方から下方に向かう空気の流れを作ることで、被処理物Tに風をあてて乾燥させる。このとき、給気ファン114Aのヒータを駆動させて、空気を温めてもよい。
図58(a)で示すように、被処理物Tを吊り下げながら乾燥させることができるので、被処理物Tの自重も利用してより効果的にシワを取ることができる。例えば図58(b)で示すように、被処理物Tの端点のシワをとることもできるので、保持装置300A、300Bで端点をより正確に保持することができ、被処理物Tの展開、認識、折り畳みをより的確に行うことができる。
制御装置900Bは、スチーム、アイロン、乾燥を、例えば、被処理物T毎に常に行うように制御してもよいし、また例えば、シワの有無を検知したときのみに行うように制御してもよい。シワの有無は、例えば、撮像装置500で検知可能である。例えば、被処理物Tに異なる角度又は異なる明るさ等で光を照射し、それぞれの場合の被処理物Tの画像データを比較することで、シワにみえるものが実際にシワなのかそれとも被処理物T固有の形状なのかを判別するようにしてもよい。
(BB)洗濯乾燥機
洗濯、脱水又は乾燥の全て又は一部機能を有していれば、洗濯乾燥機の種類、構造には特に限定はない。
例えば、斜めドラム式の洗濯乾燥機600に替えて、図59に示すような、オープントップドラム式の洗濯乾燥機600Aを用いてもよい。洗濯乾燥機600Aは、ドラム式の洗濯槽を有しておりドラム式の乾燥等の利点を有しつつ、一方で、本体上部に上開き扉605が設けられているので、図59(a)及び(b)に示すように、保持装置300Cを筐体110の上から下に向かって移動させることで、洗濯槽内に容易にアクセス可能である。そのため、保持装置300Cの構成を簡略化できる、又は、保持装置300Cに替えて、保持装置300A、300Bで被処理物Tを取り出すこともできる。保持装置300Cを用いない場合、保持装置の数を減らすことができるので、処理装置の構成をより簡略化でき、筐体をよりコンパクトにすることができる。
また例えば、ドラム式の洗濯乾燥機600に替えて、縦型の洗濯乾燥機(洗濯槽の底にある羽を回転させることで水を撹拌させるタイプ)を用いてもよい。また例えば洗濯槽と脱水槽を別に有する2槽式タイプを用いてもよい。この場合、保持装置300Cを用いて、洗濯の途中に被処理物Tを洗濯槽から脱水槽へ移動させる等をしてもよい。このように、保持装置300Cを用いた被処理物Tの取り出し動作は、必ずしも被処理物Tの折り畳み等を目的とするものではなくてもよい。
(CC)検知部
洗濯槽602内の被処理物Tを検知する検知部として、撮像装置500Bに加えて又は替えて、例えば、プロジェクタ、超音波センサ、赤外線カメラ又は赤外線センサを用いてもよい。
例えば、プロジェクタを用いる場合は、洗濯槽602内のプロジェクタの投影像から格子模様の歪みを解析し形状を導くので(図60参照)、被処理物Tの色の影響を受けない、処理が早い等の利点がある。超音波センサを用いた場合は、洗濯槽602内全体を一度に検知することができ、また被処理物Tの色の影響を受けないという利点がある。赤外線カメラや赤外線センサを用いる利点については、処理装置1の変形例(A)で述べたとおりである。
また、検知部の位置にも特に限定はない。例えば、撮像装置500Bを、摺動扉604近傍に設けてもよい(図61参照)。また例えば、撮像装置500Bを、保持装置300Cに直接搭載し、保持装置300Cの移動と同時にリアルタイムで被処理物Tの撮像を行ってもよい(図62参照)。
(DD)取り出しのタイミング
保持装置300Cを用いて洗濯槽602から被処理物Tを取り出すタイミングは、洗濯乾燥機600で被処理物Tの乾燥が完了した後でなくても構わない。
例えば、上記変形例(AA)で説明したように、折り畳み装置がスチーム、アイロン、乾燥機能を有する場合は、洗濯乾燥機600で被処理物Tの洗濯、脱水が終わった段階で、被処理物Tを洗濯槽602から取り出し、乾燥を折り畳み装置で行うようにしてもよい。この場合、被処理物Tを1つずつ吊るしながら乾燥させること等できるので、特に、洗濯乾燥機600で乾燥させることが難しいような衣服等を乾燥させる場合に有効である。
また例えば、被処理物Tによっては、そもそも乾燥が不要又はできないものがある(例えば、被処理物Tが、内部に傷みやすい衣服を収容した洗濯ネットである場合等)。このような場合、洗濯乾燥機600で被処理物T(例えば洗濯ネット)の洗濯又は脱水が終わった段階で、被処理物Tを洗濯槽602から取り出し、これを「乾燥不可」「乾燥不要」として、例えば、非処理物収納部K2に収納するようにしてもよい。
なお、洗濯槽602内の被処理物Tが例えば洗濯ネットであることを認識するためには、例えば、洗濯ネットの網(格子)の形状や洗濯ネットのチャックの形状を画像認識したり、洗濯ネットのチャックを金属センサで認識したりしてもよい。また、保持装置300Cに重量センサを設けてこの判断を検証するようにしてもよい(例えば、チャックの形状があり、一定以上の重さを有するものを洗濯ネットと認識する等)。
また例えば、洗濯乾燥機600における洗濯、脱水、乾燥中において、被処理物Tが絡まった等によりエラーが発生することがある。制御装置900Bは、このようなエラーを検知した場合に、保持装置300Cを用いて洗濯槽602から被処理物Tを取り出すようにしてもよい。またこの後、折り畳み装置を用いて被処理物Tを展開し、絡まり等をほぐしてもよい。このように、保持装置300Cを用いた被処理物Tの取り出し動作は、必ずしも被処理物Tの折り畳み等を目的とするものではなくてもよい。
(EE)保持装置
保持装置300Cを折り畳み等に用いてもよい。折り畳み装置は、3つの保持装置(300A、300B及び300C)を有することになるので、このうち2つの保持装置で被処理物Tを保持しつつ、残りの一つの保持装置で、被処理物Tの被処理物Tの輪郭上の一点(例えば、画像認識により得られた被処理物Tの特徴点や最下点)を保持するようにすることができる。この点については、以下の処理装置1Cにおいて詳述する。
なお、保持装置300Cを折り畳み等に用いる場合は、載置装置400を折り畳み装置からなくすこともできる。
また上記「1.処理装置1」の変形例の「H」で説明したと同様に、保持装置300Cにも湿度センサ、温度センサ及び/又は重量センサ等を設け、被処理物Tを保持した際に被処理物Tの乾燥が十分に行われているかを検知し、乾燥が不十分であると判断した場合には、被処理物Tを洗濯槽602に戻して再度乾燥を行わせたり、折畳工程の前に筐体110内で被処理物Tに温風をあてて乾燥させたりしてもよい。
(FF)通信機能
処理装置1Bは、通信機能を備えていてもよい。処理装置1Bは、例えば、有線及び/又は無線回線(例えば、LAN、Blootooth、WiFi、赤外線、NFC、DLC等)を介して、通信機能を備えた他の機器(例えば、スマートフォンのような情報端末、パーソナルコンピュータ等)と情報伝達を行うようにしてもよい。そして、処理装置1Bにおける乾燥等や折り畳み等の処理状況を他の機器に送信したり、他の機器からの処理に関する指令を受信したりしてもよい。例えば、乾燥等の最中にエラーが発生したことを他の機器に通知してもよい。また例えば、認識工程において制御装置900Bで被処理物Tの種類が認識できなかった場合、当該被処理物Tの画像を他の機器に送信して、被処理物Tの種類をユーザに問い合わせる等してもよい。
III.第3の処理装置
次に、処理装置1Cについて説明する。処理装置1Cは、3つの保持装置を用いて折り畳み等を行うものである。
図69に示すとおり、処理装置1Cは、筐体110内に、概略、保持装置300A、300B、300C、載置装置400、撮像装置500(図示せず)及び500C(図示せず:床面118上を撮像可能である点以外は、撮像装置500Bと同様である)、収納部K及び制御装置900C(図示せず:洗濯乾燥機制御部960を備えない点を除き制御装置900Bと同様)等を備えている。すなわち、処理装置1Cは、処理装置1Bにおいて、洗濯乾燥機600、挟持装置700及び搬送装置800を省略したものである。そこで以下では、処理装置1Cが処理装置1Bと異なる点について中心に説明し、処理装置1Bと同一又は同様の構成については、説明は省略する。
(1)折り畳み専用機であること
処理装置1Cは、処理装置1Bとは異なり、洗濯乾燥機600を備えない。すなわち、処理装置1Cは、(処理装置1と同様)折り畳み機能に特化した折り畳み専用機である。
具体的には、ユーザは、乾燥済の被処理物Tを投入扉112(図示せず)から投入する。これにより、被処理物Tは床面118上に順に載置されていく。
投入扉112近傍に取り付けられた撮像装置500C(図示せず)により検知された被処理物Tは、保持装置300Cによりその端点(例えば、高さ(Z方向)が最も高い点)が把持された後、保持装置300A及び300Bに受け渡されるようになっている。
なお、複数の被処理物Tが床面118上にある場合は、保持装置300Cにより被処理物Tの山をかき分けるような動作を入れてもよい。これにより、被処理物T同士の絡まりを解消したり、被処理物T同士の相対位置をずらすことで保持装置300Cにより把持しやすくしたりできる。
ここで、保持装置300A、保持装置300B及び保持装置300Cは、処理装置1において説明したと同様、それぞれ、保持機構と移動機構とを備え、保持機構は、幅方向(矢印X方向)を軸に回転するとともにフィンガ部材によって把持する把持機構を構成し、移動機構は、幅方向(矢印X方向)移動機構、上下方向(矢印Z方向)移動機構、前後方向(矢印Y方向)移動機構を構成している。
図70に示すとおり、保持装置300A及び保持装置300Bは、筐体110の隅部を除く上半分全域(第1領域)を可動域としている。ここで、図70に示すように、保持装置300Aの保持機構310Aは、移動機構320Aの前方向(Y1方向)に取り付けられ、保持装置300Bの保持機構310Bは、移動機構320Bの後方向(Y2方向)に取り付けられている。言い換えると、保持装置300Aの保持機構310Aと、保持装置300Bの保持機構310Bとは、互いに前後方向(矢印Y方向)で対向するように、それぞれの移動機構320A及び320Bに取り付けられている。これにより、保持装置300Aと300Bとで互いに同一構成の移動機構を用いつつも、両者の可動範囲を同一にすることができている。
保持装置300Cは、筐体110の隅部を除く下半分全域(第2領域)を可動域としており、筐体110の上下方向中央部において保持装置300A及び保持装置300Bと保持装置300Cとで可動域が重なるようになっている。これにより、保持装置300Cと、保持装置300A及び300Bとの間で、被処理物Tの受け渡しが可能となっている。なお、この受け渡し動作をより確実に行うために、例えば、次のような工夫が可能である。
図71に示すように、保持装置300Cの保持機構310Cは、被処理物Tを床面118でピックアップした後、上方に移動する。その際、保持機構310Cは、幅方向(紙面垂直方向)を軸に反時計回り(下から矢印Y1に向かう方向)に回動して上向きになる。これにより被処理物Tは、一対のフィンガ部材322Cのうち回転方向側(矢印Y1方向側)のフィンガに引っかかり盛り上がった状態となる。被処理物Tの受け渡しの際はこの盛り上がった部分を把持したほうがより安定して把持できるので、保持装置300A(300B)は回転方向側(矢印Y1方向)から被処理物Tを把持するようにする。
被処理物Tの受け渡し後、保持装置300C及び保持装置300A(300B)は、少なくとも前後方向(Y方向)に離間する方向の成分をもって移動する。例えば、受け渡し後、保持装置300Cは、保持装置300A(300B)に対して、少なくとも図71の矢印Y2方向の水平成分を含んで移動する。これにより保持装置300Cが被処理物Tから離間するので、保持装置300A(300B)に把持され垂れ下がる被処理物Tが、保持装置300Cに引っかかることを防止できる。なお、後述するように、保持装置300Cは、次の端点(第1端点)を保持するために、載置板402近傍の高さ位置で待機する。
なお、受け渡しの際に、上記とは逆に、保持機構310Cが時計回り(下から矢印Y2に向かう方向)に回動して上向きになった場合は、保持装置300A(300B)はこの回転方向側(矢印Y2方向)から被処理物Tを把持するようにする。受け渡し後は、保持装置300Cは、保持装置300A(300B)に対して、少なくとも離間する方向(矢印Y1方向)の水平成分を含んで移動する。
また例えば、保持装置300Cの保持機構310Cを保持装置300A及び300Bとは異ならせて次のような構成としてもよい。例えば、図72(a)に示すように、保持機構310Cに、2対のフィンガ部材322C1(第3把持部)、322C2(第4把持部)を設けてもよい。このフィンガ部材321C1と322C2とは、保持機構310Cの中心軸からそれぞれ等間隔離間している(保持機構310Cの中心軸に対して軸対称に配置されている)。
これにより、図72(b)に示すように、被処理物Tの受け渡し時に保持機構310A(又は310B、以下この段落において同様)と保持機構310Cとをそれぞれの中心軸を揃えて対向させた状態において、保持機構310A(310B)の一対のフィンガ部材322A(322B)と、保持機構310Cの2対のフィンガ部材322C1、322C2とが異なる位置にくることになる。これにより、保持機構310A(310B)と保持機構310Cのそれぞれの中心軸を一致させた状態で受け渡しが可能になるので、保持機構の駆動制御が容易になる。また、受け渡しの際には、被処理物Tを2対のフィンガ部材322C1、322C2により2点で把持しつつ、この2点の把持箇所の中心をフィンガ部材322A(322B)で把持することができる。これにより受け渡しの際の被処理物Tの重心移動を抑制できる。
なお、保持機構310A(310B)に2対のフィンガ部材を設けて保持機構310Cは1対のフィンガ部材のみとしてもよいし、保持機構310A(310B)の中心軸から互いに第1の距離離間する2対のフィンガ部材を設けるとともに、保持機構310Cの中心軸から互いに第1の距離とは異なる第2の距離だけ離間する2対のフィンガ部材を設けても良い。
(2)保持装置300Cを認識工程で利用すること
保持装置300Cは、処理装置1Bの変形例(EE)と同様に、折り畳み等に用いられるようになっている。図73は、保持装置300Cを保持装置300A及び300Bに加えて用いた場合の認識工程を説明する図である。
図73は、工程S1から工程S22までの間の各保持装置300A、300B及び300Cの把持位置を、各工程における被処理物Tの動作とともに経時的に示したものであり、ここでは第3端点まで持ち替えた段階で被処理物Tの種類が判別された場合を例にしている。図73において、保持装置300A乃至300Cの列の空欄は保持装置が何も把持していないことを示している(例えば、工程S12においては、保持装置300Aは何も把持しておらず、保持装置300Bは第1端点を把持し、保持装置300Cは、第2端点を把持している。)
図73に示すように、処理装置1Cの認識工程においては、第1点及び検出した被処理物Tの端点(第1端点、第2端点、第3端点)は、最初に保持装置300Cが把持し(工程S1、工程S6、工程S12、工程S17)、保持装置300A又は保持装置300Bに載置板402の下方で受け渡すようになっている(工程S2、工程S8、工程S13、工程S19。受け渡しの動作については、図71参照)。
ここで、図77に示すように、保持装置300Cによる被処理物Tの最下点(第1端点、第2端点、第3端点)の把持に先立って(工程S6、工程S12、工程S17)、保持装置300B(300A)が被処理物Tを「弛ませる」動作を行うことが好ましい。
具体的には、図77(a)に示すように、保持装置300B(300A)が、被処理物Tを載置板402の上方で保持している状態において、保持装置300B(300A)及び/又は載置板402を互いに上下方向(Z方向)に近接するように相対移動させる。例えば、保持装置300B(300A)を載置板402に向けて下方に移動させる。
これにより、図77(b)に示すように、被処理物Tには、載置板402上の載置箇所と保持装置300B(300A)による把持箇所との間で「弛み」が生じる。被処理物Tが弛んでいることにより次のような利点がある。すなわち、保持装置300Cが被処理物Tの最下点(第1端点、第2端点、第3端点)を把持する際に、被処理物Tが例えば下方に引っ張られたとしても、「弛み」があるために弛みがいわば緩衝作用を発揮して、被処理物Tに過剰な張力が作用することはない。これにより、被処理物Tに伸びや傷みが生じてしまうような事態を防止できる。
なお、端点の把持に際して被処理物Tを「弛ませる」上記動作は、保持装置300Cによる把持動作のみならず、上述した第1乃至第2の処理装置等において、一方の保持装置(300A)が被処理物Tを把持している状態で、他方の保持装置(300B)が最下点を把持するような状況においても同様に適用できる。
保持装置300Cは、認識工程の間は載置板402の下方近傍に待機するようになっており、端点を検出してから当該端点を保持するまでの時間は(載置板402上方に位置している保持装置300A又は保持装置300Bを当該端点まで移動させて把持する場合等に比べて)短縮することができる。
また、被処理物Tを保持する保持装置が一つ増えたことで、例えば工程S17に示すように、保持装置300A及び300Bで被処理物Tを把持した状態において保持装置300Cにて新たな端点を把持することもできるようになる。
このとき、保持装置300Cが所望の位置で第3端点を掴むように、保持装置300B(300A)を例えば上下方向(Z方向)に移動させても良い。この点を、被処理物Tがタオルである場合を例に図78を用いて説明する。
第1の処理装置の変形例(V)で図45及び図46を用いて説明したように、被処理物Tがタオルである場合は、保持装置300Bがタオルの長手方向一端部の隅部TR1(第1端点)を保持し、保持装置300Aがタオルの長手方向他端部の隅部TL1(第2端点)を保持した段階で、被処理物Tの幅方向(X方向)両端部から中央部分に向けて下方向に垂れ下がった形状が現れ(図78(a))、第3端点を保持する前に被処理物Tがタオルと認識できる。
ここで、被処理物Tが折り畳み動作を開始するのに最適な形状(図78(c))になるようにするには、保持装置300Aが(保持装置300Bが保持している側の)隅部TR2を保持する状態にする必要がある。そのためには、次の端点認識において、隅部TR2が最下点(第3端点)として認識されるようにすることが好ましい(逆に言えば、隅部TL2等他の箇所が最下点として認識されてはいけない)。
そこで、保持装置300Bを保持装置300Aに対して相対的に下方に移動させ、隅部TR2が最下点となるようにする(図78(b))。これにより、保持装置300Cによって当該隅部TR2(第3端点)を保持させることができる。
その後、隅部TR2は、保持装置300Aに受け渡され(図73工程S19)上方に移動し(同工程S20、S21)、被処理物Tは載置板402上方で吊り下げられる(同工程S22、図78(c))。これにより、折り畳み工程を開始するまでの動作を短縮することができる。
なお、保持装置300Cは、被処理物Tの第1端点は、保持装置300Bに受け渡すが、以降の端点(本例では第2端点、第3端点)は、全て保持装置300Aに受け渡すようになっている。これは、双方の保持装置300A及び300Bで端点の受け渡しを繰り返すと、折角保持した認識に必要な端点(この場合は第1端点)の把持を毎回解除することになり、展開動作がいつまでも終わらないか、又は、保持装置300A及び300B間で毎回受け渡しが必要となり展開動作が煩雑化するからである。
また、処理装置1Cの認識工程では、その初期工程において被処理物Tを載置板402より下に「落とす」動作を行う(工程S7)。すなわち、保持装置300Bが被処理物Tを第1点で載置板402より上方で吊り上げつつ、保持装置300Cが被処理物Tを第1端点で載置板402より下方で把持した状態になると(工程S6)、保持装置300Bの把持を解除して、載置板402より下の保持装置300Cにより第1端点のみで把持するようにする(工程S7)。これにより、被処理物Tは、載置板402よりも下方に落下する。このとき、載置板402を被処理物Tの下方に配置させるとともに回転させることで、「落とす」動作を補助するようにしてもよい。このようにして被処理物Tが落下するので、被処理物Tに絡まり等があった場合にそれをほぐすことができる。しかも特に絡まり等が発生している可能性の高い認識工程の初期段階でこのような動作を行うので、以降の認識工程における絡まり等による誤認識や端点が把持できない等のトラブルを抑制できる。
また、処理装置1Cの認識工程においては、被処理物Tの第1点又は端点(第1端点、第2端点、第3端点)を保持装置300Cから保持装置300A又は300Bに載置板402より下で受け渡した後、保持装置300A又は300Bで第1点又は端点を載置板402より上方に持ち上げる最中に、被処理物Tを載置板402の縁部及び主面上に接触させて「沿わせる」動作を行う(工程S4、工程S10、工程S15及び工程S21)。これにより、被処理物Tのシワやもつれをほぐすことができる。
(3)挟持装置700及び搬送装置800が不要であること
処理装置1Cは、処理装置1の変形例(Z)において、図67及び図68を用いて説明した折り畳み方法を採用しており、挟持装置700を用いなくとも被処理物Tを折り畳むことができる。また、処理装置1Cは、折り畳み工程完了後、折り畳んだ被処理物Tを保持装置300A及び300Bを用いて載置板402から収納部Kに直接搬送する。そのため、処理装置1Cは、挟持装置700及び搬送装置800が必要なく、筐体110をよりコンパクトにすることができる。
なお、折り畳んだ被処理物Tを収納部Kに載置する際に、保持装置300A及び300Bに加えて載置板402を利用してもよい。具体的には、図74に示すように、収納部Kの底板上に被処理物Tを保持装置300A及び300Bで載置する動作(この場合は保持装置300A及び300Bを矢印M方向に移動させている)に連動させて、載置板402を保持装置300A及び300Bと同じ方向(矢印M方向)にスライド移動させて被処理物Tに軽く当接させるようにしてもよい。これにより、被処理物Tをその折り畳み形状を崩れさせることなく収納部Kに載置させることができる。
また、折り畳みの最後の工程を、被処理物Tを収納部Kに載置する際に併せて行うようにしてもよい。これを被処理物TがTシャツの場合を例に図79及び図80を用いて説明する。
この方法では、載置板402と保持装置300Cと用いて、被処理物T(ここではTシャツ)に最後の折り線(第2折り線B3)をつけつつ、収納部Kの底板上(この例では、底板に収容された2枚の被処理物上)に載置することが特徴である。
まず、図79(a)に示すように、載置板402上に載置され被処理物Tは、折り線B2で保持装置300A及び300Bにて保持されつつ、他端は載置板402から垂れ下がった状態になっている。この状態から、載置板402及び保持装置300A(300B)を、互いに同期させつつ、保持装置300C及び収納部Kに向かって(Y2方向)移動させる。
なお、保持装置300Cは、より具体的には、保持装置300Cの把持機構を幅方向に移動させるためのフレーム機構であって、図面に垂直な方向(X方向)延出した細長の矩形体である(以下、本例においては単に保持装置300Cという。)。
ここで、保持装置300Cの上端は、収納部Kの収納位置(ここでは、既に2枚被処理物Tが収容されているので、2枚目の被処理物の上面位置)よりも僅かに高い位置になるように収納部Kに対して位置決めされている。
これにより、図79(b)に示すように、被処理物Tは、載置板402から垂れ下がった部分が保持装置300Cの上端に沿って折り曲げられつつ、収納部Kの底板上(載置済の2枚目の被処理物の上方)に押し込まれる。そして、載置板402が収納部Kの側壁近傍まで押し込まれ、被処理物TのY方向位置が、載置済の被処理物の位置と一致し折り線B3が付けられた段階で、載置板402と保持装置300A(300B)とのY方向移動を停止させる(図79(c))
次に、載置板402を抜き取る動作を行う。具体的には、被処理物Tを折り線B2にて保持したまま保持装置300A及び300Bを上方に移動させつつ、載置板402を傾斜(逆方向(時計回り)に回動)させることで、被処理物Tを持ち上げる(図80(d))。
そのまま載置板402を収納部Kから離間させる方向(Y1方向)に移動させる。このとき、被処理物Tの折り線B2側の袖部が載置板402から離間しないように、保持装置300A(300B)を載置板402の移動にあわせて、収納部Kから離間させる方向(Y1方向)に移動に移動させつつ、下方向にも移動させる(図80(e))。
最後に、載置板402をわずかに傾斜(逆方向(時計回り)に回動)させつつY1方向に移動させて、被処理物Tから載置板を抜き取る(図80(f))。
上記方法によれば、最後の折畳工程を収納部Kへの収納と同時に行うことができる。また、保持装置300Cの上端は、毎回、収納部Kの収納位置(ここでは、既に2枚被処理物Tが収容されているので、2枚目の被処理物の上面位置)よりも僅かに高い位置になるように収納部Kに対して位置決めされるので、載置済の被処理物の折り畳み形状を崩すことなく、被処理物Tを順次積み重ねていくことができる。さらに、載置板402の抜き取りに際し、傾斜した載置板402の移動にあわせて保持装置300A(300B)を下方にも移動させるので、被処理物Tの折り畳み形状を崩すこともない。なお、上述した保持装置300Cのフレーム機構は、Z方向に移動可能な板状部材等により別途代替されてもよい。