JP7031005B2 - 車両挙動予測方法及び車両挙動予測装置 - Google Patents
車両挙動予測方法及び車両挙動予測装置 Download PDFInfo
- Publication number
- JP7031005B2 JP7031005B2 JP2020547454A JP2020547454A JP7031005B2 JP 7031005 B2 JP7031005 B2 JP 7031005B2 JP 2020547454 A JP2020547454 A JP 2020547454A JP 2020547454 A JP2020547454 A JP 2020547454A JP 7031005 B2 JP7031005 B2 JP 7031005B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- moving object
- course
- time
- behavior prediction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Mechanical Engineering (AREA)
- Traffic Control Systems (AREA)
Description
本発明は、車両挙動予測方法及び車両挙動予測装置に関する。
従来より、自車両が交差点を右折する際に、自車両の前方の対向車両に関する支援情報を自車両の運転者に報知する発明が知られている(特許文献1)。特許文献1に記載された発明は、対向道路を直進する対向車両(先行車両)と、先行車両の後方を走行する後方車両との車種の関係に基づいて後方車両が先行車両の死角に入り込む度合いに応じた死角ランクを設定する。そして、特許文献1に記載された発明は、設定した死角ランクに基づいて支援情報を運転者に報知する。
しかしながら、特許文献1に記載された発明は、後方車両が先行車両の死角に入り込む度合いに応じた死角ランクを設定するものの、後方車両の進路を予測していない。後方車両の進路の予測は、自車両のスムーズな走行に寄与するが、特許文献1に記載された発明は後方車両の進路を予測していないため、改善の余地がある。また、後方車両の進路の予測は、自車両のスムーズな走行に寄与するため、早期の予測が求められる。
本発明は、上記問題に鑑みて成されたものであり、その目的は、自車両の前方または側方を走行する移動物体の進路を早期に予測する車両挙動予測方法及び車両挙動予測装置を提供することである。
本発明の一態様に係る車両挙動予測方法は、自車両の前方または側方の物体の自車両に対する位置を検出し、自車両から見て物体より遠方を走行する移動物体を検出する。車両挙動予測方法は、移動物体を検出した後に移動物体が所定の進路で進行した場合の、移動物体を検出した時から移動物体が死角領域に進入するまでの時間である検出可能時間を推測する。車両挙動予測方法は、推測した検出可能時間と、移動物体を検出した時から移動物体が実際に死角領域に進入するまでの時間である、実際の検出可能時間とを比較し、比較した結果に基づいて移動物体の進路を予測する。
本発明によれば、自車両の前方または側方を走行する移動物体の進路を早期に予測することができる。
以下、本発明の実施形態について、図面を参照して説明する。図面の記載において同一部分には同一符号を付して説明を省略する。
(車両挙動予測装置の構成)
図1を参照して、車両挙動予測装置の構成を説明する。車両挙動予測装置は、物体検出装置1と、自車位置推定装置2と、地図取得装置3と、コントローラ100とを備える。車両挙動予測装置は、自動運転機能を有する車両に適用されてもよく、自動運転機能を有しない車両に適用されてもよい。また、車両挙動予測装置は、自動運転と手動運転とを切り替えることが可能な車両に適用されてもよい。なお、本実施形態における自動運転とは、例えば、ブレーキ、アクセル、ステアリングなどのアクチュエータの内、少なくとも何れかのアクチュエータが乗員の操作なしに制御されている状態のことを指す。そのため、その他のアクチュエータが乗員の操作により作動していたとしても構わない。また、自動運転とは、加減速制御、横位置制御などのいずれかの制御が実行されている状態であればよい。また、本実施形態における手動運転とは、例えば、ブレーキ、アクセル、ステアリングを乗員が操作している状態のことを指す。
図1を参照して、車両挙動予測装置の構成を説明する。車両挙動予測装置は、物体検出装置1と、自車位置推定装置2と、地図取得装置3と、コントローラ100とを備える。車両挙動予測装置は、自動運転機能を有する車両に適用されてもよく、自動運転機能を有しない車両に適用されてもよい。また、車両挙動予測装置は、自動運転と手動運転とを切り替えることが可能な車両に適用されてもよい。なお、本実施形態における自動運転とは、例えば、ブレーキ、アクセル、ステアリングなどのアクチュエータの内、少なくとも何れかのアクチュエータが乗員の操作なしに制御されている状態のことを指す。そのため、その他のアクチュエータが乗員の操作により作動していたとしても構わない。また、自動運転とは、加減速制御、横位置制御などのいずれかの制御が実行されている状態であればよい。また、本実施形態における手動運転とは、例えば、ブレーキ、アクセル、ステアリングを乗員が操作している状態のことを指す。
物体検出装置1は、自車両に搭載された、レーザレーダ、ミリ波レーダ、カメラなどの物体検出センサを備える。物体検出装置1は、複数の物体検出センサを用いて自車両の周囲の物体を検出する。また、物体検出装置1は、自車両の前方または側方の物体を検出する。物体検出装置1は、他車両、バイク、自転車、歩行者を含む移動物体、及び駐車車両、建物を含む静止物体を検出する。例えば、物体検出装置1は、移動物体及び静止物体の自車両に対する位置、姿勢(ヨー角)、大きさ、速度、加速度、ジャーク、減速度、ヨーレートを検出する。
自車位置推定装置2は、自車両に搭載された、GPS(グローバル・ポジショニング・システム)、オドメトリなど自車両の絶対位置を計測する位置検出センサを備える。自車位置推定装置2は、位置検出センサを用いて、自車両の絶対位置、すなわち、所定の基準点に対する自車両の位置、姿勢及び速度を計測する。
地図取得装置3は、自車両が走行する道路の構造を示す地図情報を取得する。地図取得装置3が取得する地図情報には、車線の絶対位置、車線の接続関係、相対位置関係などの道路構造の情報が含まれる。また、地図取得装置3が取得する地図情報には、駐車場、ガソリンスタンドなどの施設情報も含まれる。地図取得装置3は、地図情報を格納した地図データベースを所有してもよいし、クラウドコンピューティングにより地図情報を外部の地図データサーバから取得してもよい。また、地図取得装置3は、車車間通信、路車間通信を用いて地図情報を取得してもよい。
コントローラ100は、物体検出装置1及び自車位置推定装置2による検出結果及び地図取得装置3による取得情報に基づいて、他車両の進路を予測する。コントローラ100は、CPU(中央処理装置)、メモリ、及び入出力部を備える汎用のマイクロコンピュータである。マイクロコンピュータには、車両挙動予測装置として機能させるためのコンピュータプログラムがインストールされている。コンピュータプログラムを実行することにより、マイクロコンピュータは、車両挙動予測装置が備える複数の情報処理回路として機能する。なお、ここでは、ソフトウェアによって車両挙動予測装置が備える複数の情報処理回路を実現する例を示すが、もちろん、以下に示す各情報処理を実行するための専用のハードウェアを用意して、情報処理回路を構成することも可能である。また、複数の情報処理回路を個別のハードウェアにより構成してもよい。
コントローラ100は、複数の情報処理回路として、検出統合部4と、物体追跡部5と、地図内位置演算部6と、挙動予測部10と、車両制御部30を備える。更に、挙動予測部10は、車線判定部11と、意図予測部12と、死角領域算出部13と、進入タイミング推測部14と、進入判定部15と、軌道取得部16と、進路予測部17とを備える。
検出統合部4は、物体検出装置1が備える複数の物体検出センサの各々から得られた複数の検出結果を統合して、各物体に対して一つの検出結果を出力する。具体的には、物体検出センサの各々から得られた物体の挙動から、各物体検出センサの誤差特性などを考慮した上で最も誤差が少なくなる最も合理的な物体の挙動を算出する。具体的には、既知のセンサ・フュージョン技術を用いることにより、複数種類のセンサで取得した検出結果を総合的に評価して、より正確な検出結果を得る。
物体追跡部5は、検出統合部4によって検出された物体を追跡する。具体的に、物体追跡部5は、異なる時刻に出力された物体の挙動から、異なる時刻間における物体の同一性の検証(対応付け)を行い、かつ、その対応付けを基に、物体を追跡する。
地図内位置演算部6は、自車位置推定装置2により得られた自車両の絶対位置、及び地図取得装置3により取得された地図データから、地図上における自車両の位置を推定する。
車線判定部11は、物体追跡部5から取得した物体情報、及び地図内位置演算部6によって推定された自己位置を用いて、地図上における自車両及び物体の走行車線を特定する。
意図予測部12は、車線判定部11から取得した走行車線に関する情報及び道路構造に基づいて、物体が進む可能性があるすべての候補車線を予測する。例えば、物体が走行している走行車線が1車線道路の場合、物体が進む可能性がある候補車線は1つとなる。一方、物体が走行している走行車線が2車線道路の場合、物体が進もうとする候補車線は、そのまま走行車線を直進する車線と、走行車線に隣接する車線の2つがある。また、意図予測部12は、物体の位置、向き、姿勢などに基づいて物体の挙動を予測してもよい。
死角領域算出部13は、自車両の周囲の物体によって形成される、自車両の死角領域を算出する。自車両の死角領域とは、自車両の周囲の物体によって形成された死角によって、物体検出装置1が物体を検出することができない領域をいう。
進入タイミング推測部14は、移動物体が検出された後に移動物体が直進した場合の、移動物体が検出された時から移動物体が死角領域に進入するまでの時間である検出可能時間を推測する。詳細は、後述する。
進入判定部15は、進入タイミング推測部14によって推測された検出可能時間が経過する前に、移動物体が死角領域に進入したか否かを判定する。すなわち、進入判定部15は、進入タイミング推測部14によって推測された検出可能時間と実際の検出可能時間とを比較して、推測された検出可能時間よりも実際の検出可能時間が短いか否かを判定する。
軌道取得部16は、移動物体が検出された時から移動物体が死角領域に進入する直前までの、移動物体の軌道を取得する。
進路予測部17は、進入判定部15によって判定された結果に基づいて、移動物体の進路を予測する。また、進路予測部17は、進入判定部15によって判定された結果及び軌道取得部16から取得した情報に基づいて、移動物体の進路を予測してもよい。
車両制御部30は、予め設定された進路に進むため、各種センサの情報を用いて自車両の各種アクチュエータ(ステアリングアクチュエータ、アクセルペダルアクチュエータ、ブレーキアクチュエータなど)を制御して自動運転制御または運転支援制御(例えば、自動ブレーキ)を実行する。
次に、図2~5を参照して、進路予測方法の一例について説明する。
図2に示すように、自車両50は、2車線道路の右側を走行しており、次の交差点を右折する予定である。また、他車両51は、2車線道路の右側を走行しており、次の交差点を右折する予定である。なお、意図予測部12は、他車両51の位置、向き、姿勢、ターンシグナルの点灯の有無などに基づいて、他車両51が次の交差点を右折する予定であるか否か予測してもよい。また、他車両51は、自車両50と同じ道路を自車両50が走行する方向と逆の方向に走行する対向車両である。他車両52は、他車両51の後方を走行している。図2に示すRは、他車両51により形成される、自車両50の死角領域を示す。死角領域Rは死角領域算出部13によって算出される。具体的には、死角領域算出部13は、物体検出装置1によって検出された他車両51の位置に基づいて死角領域Rを算出する。他車両51及び他車両52は、自車両50の前方に位置し、物体検出装置1によって検出される。また、図2に示す走行シーンにおいて、他車両52は死角領域Rに進入していないため、物体検出装置1は他車両52を検出できる。他車両52の矢印に示すように、他車両52の進路として2つの進路が考えられる。一つの進路は、他車両52がそのまま直進し、他車両51に追従する進路である。もう一つの進路は、他車両52が車線変更する進路である。本実施形態において、他車両52が死角領域Rに進入したということは、物体検出装置1が他車両52を検出できなくなったということを意味する。
他車両52が車線変更した場合、他車両52の進路と自車両50の進路とが交差する可能性がある。この場合、他車両52が優先であるため、自車両50は減速、または停止を行うことになる。一方で、他車両52がそのまま直進し、他車両51に追従する場合、他車両52の進路と自車両50の進路とは交差しない。他車両52も交差点を右折するからである。この場合、自車両50は減速、または停止を行うことなく、交差点を通過できる。したがって、図2に示す走行シーンにおいて、他車両52の進路を早期に予測することが求められる。
そこで本実施形態において、進入タイミング推測部14は、他車両52が検出された後に他車両52が直進した場合の、他車両52が検出された時から他車両52が死角領域Rに進入するまでの時間である検出可能時間を推測する。この検出可能時間は、他車両52が検出された後に他車両52が直進するという仮定条件、換言すれば他車両52が検出された後に他車両52の挙動は変化しないという仮定条件において推測されるものである。
図3に示す走行シーンは、図2に示す走行シーンから検出可能時間T1が経過した後の走行シーンである。死角領域Rは、自車両50及び他車両51の位置、速度などに応じて時々刻々と変化する。そこで、他車両52が検出された後に他車両52が直進するという仮定条件において、進入タイミング推測部14は、自車両50、他車両51、及び他車両52の速度、位置関係などを用いて、他車両52が検出された時から他車両52が死角領域Rに進入するまでの検出可能時間T1を推測する。つまり、検出可能時間T1が経過した後に、他車両52が検出されなくなったということは、他車両52は直進した可能性が高いことを意味する。したがって、検出可能時間T1が経過した後に、他車両52が検出されなくなった場合、すなわち実際の検出可能時間が推測された検出可能時間T1以上である場合、進路予測部17は、他車両52は直進したと予測する。
図4に示す走行シーンは、図2に示す走行シーンから検出可能時間T1が経過する前の走行シーンである。検出可能時間T1が経過する前に、他車両52が死角領域Rに進入したということは、他車両52が車線変更した可能性が高いことを意味する。理由は、図2に示す走行シーンにおいて他車両52が直進したならば、検出可能時間T1が経過するまでは、物体検出装置1は他車両52を検出可能だからである。それにもかかわらず、検出可能時間T1が経過する前に、物体検出装置1が他車両52を検出できなくなった、すなわち、他車両52が死角領域Rに進入したということは、他車両52が車線変更した可能性が高いことを意味する。したがって、検出可能時間T1が経過する前に、他車両52が死角領域Rに進入した場合、すなわち実際の検出可能時間が推測された検出可能時間T1未満である場合、進路予測部17は、他車両52は車線変更したと予測する。なお、検出可能時間T1が経過する前に、他車両52が死角領域Rに進入したか否かについては、進入判定部15が判断する。
なお、進路予測部17は、他車両52の進路を予測すると説明したが、これに限定されない。例えば、図5のグラフAに示すように、検出可能時間T1が経過する前に、他車両52が死角領域Rに進入した場合、進路予測部17は、他車両52が車線変更した可能性が高いと判定してもよい。また、図5のグラフBに示すように、検出可能時間T1が経過した後に、他車両52が検出されなくなった場合、進路予測部17は、他車両52が車線変更した可能性が低いと判定してもよい。他車両52が車線変更した可能性が低いということは、他車両52は直進した可能性が高いことを意味する。
他車両51は、普通自動車でもよく、トラック、バスなどでもよい。また、他車両52は、車両として説明したが、車両に限定されない。他車両52は、他車両51の後方を走行可能な移動物体であればよく、例えばバイク、自転車でもよい。
また、上述した例においては、進入判定部15が、他車両52が直進した場合を仮定した検出可能時間T1と実際の検出可能時間とを比較する。そして、進路予測部17は、実際の検出可能時間が推測された検出可能時間T1以上である場合には他車両52は直進したと予測し、実際の検出可能時間が推測された検出可能時間T1未満である場合には他車両52は車線変更したと予測する。ただし、これに限らない。すなわち、検出可能時間T1は、他車両52が予め定められた所定の進路で進行した場合の検出可能時間であってもよい。この場合、進入判定部15が、検出可能時間T1と実際の検出可能時間とを比較することによって、進路予測部17は他車両52が所定の進路で進行したか否かを予測することが可能である。例えば、検出可能時間T1が、他車両52が直進ではなく、車線変更した場合を仮定した時間である場合、進路予測部17は、実際の検出可能時間が検出可能時間T1より大きい場合に他車両52は直進したと予測してもよく、実際の検出可能時間が検出可能時間T1以下である場合に他車両52は車線変更したと予測してもよい。ただし、検出可能時間T1をより正確に推測するためには、上述の通り検出可能時間T1は他車両52が直進した場合を想定した時間であることが好ましい。
図2~4では、直進道路について説明したが、本発明が適用されるのは直進道路に限定されない。本発明はカーブ(図6~8)においても適用される。図6に示すカーブにおいても他車両52の矢印に示すように、他車両52の進路として2つの進路が考えられる。図7に示すように、検出可能時間T1が経過した後に、他車両52が検出されなくなった場合、進路予測部17は、他車両52は直進したと予測する。また、図8に示すように、検出可能時間T1が経過する前に、他車両52が死角領域Rに進入した場合、進路予測部17は、他車両52は直進したと予測する。なお、図6~8において、他車両51が停止している理由は、歩行者60の通過を待っているからである。
次に、図9~11を参照して、進路予測方法の他の例について説明する。
図9に示すように、自車両50は、1車線道路を走行しており、次の交差点を右折する予定である。また、他車両51は、1車線道路を走行しており、次の交差点を右折する予定である。他車両52は、他車両51の後方を走行している。図9に示す走行シーンにおいて、他車両52は死角領域Rに進入していないため、物体検出装置1は他車両52を検出できる。他車両52の前方左側には、進入可能な側道70がある。他車両52の矢印に示すように、他車両52の進路として2つの進路が考えられる。一つの進路は、他車両52がそのまま直進し、他車両51に追従する進路である。もう一つの進路は、他車両52が左折して側道70に進入する進路である。
図10に示す走行シーンは、図9に示す走行シーンから検出可能時間T1が経過した後の走行シーンである。図10に示すように、検出可能時間T1が経過した後に、他車両52が検出されなくなった場合、進路予測部17は、他車両52は直進したと予測する。
図11に示す走行シーンは、図9に示す走行シーンから検出可能時間T1が経過する前の走行シーンである。検出可能時間T1が経過する前に、他車両52が死角領域Rに進入したということは、他車両52が左折した可能性が高いことを意味する。したがって、検出可能時間T1が経過する前に、他車両52が死角領域Rに進入した場合、進路予測部17は、他車両52は左折したと予測する。
なお、図9~11において、他車両52が左折可能な場所として側道70を取り上げて説明したが、他車両52が左折可能な場所は側道70に限定されない。他車両52が左折可能な場所は、駐車場、ガソリンスタンド、コンビニエンスストアなどを含む。
次に、図12~14を参照して、進路予測方法の他の例について説明する。
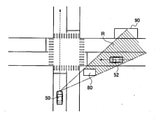
図12に示すように、自車両50は、1車線道路を走行しており、次の交差点を直進する予定である。また、他車両52は、1車線道路を走行している。図12に示すRは、建物80により形成される、自車両50の死角領域を示す。他車両52及び建物80は、自車両50の側方(前側方)に位置し、物体検出装置1によって検出される。
図12に示す走行シーンにおいて、他車両52は死角領域Rに進入していないため、物体検出装置1は他車両52を検出できる。他車両52の前方右側には、進入可能な駐車場90がある。他車両52の矢印に示すように、他車両52の進路として2つの進路が考えられる。一つの進路は、他車両52がそのまま直進する進路である。もう一つの進路は、他車両52が右折して駐車場90に進入する進路である。
図13に示す走行シーンは、図12に示す走行シーンから検出可能時間T1が経過した後の走行シーンである。図13に示すように、検出可能時間T1が経過した後に、他車両52が検出されなくなった場合、進路予測部17は、他車両52は直進したと予測する。
図14に示す走行シーンは、図12に示す走行シーンから検出可能時間T1が経過する前の走行シーンである。検出可能時間T1が経過する前に、他車両52が死角領域Rに進入したということは、他車両52が右折した可能性が高いことを意味する。したがって、検出可能時間T1が経過する前に、他車両52が死角領域Rに進入した場合、進路予測部17は、他車両52は右折したと予測する。
次に、図15A及び図15Bのフローチャートを参照して、車両挙動予測装置の一動作例を説明する。
ステップS101において、物体検出装置1は、複数の物体検出センサを用いて、自車両50の前方の物体(他車両51)を検出する。また、物体検出装置1は、自車両50から見て他車両51より遠方を走行する移動物体(他車両52)を検出する。処理はステップS103に進み、検出統合部4は、複数の物体検出センサの各々から得られた複数の検出結果を統合して、各他車両に対して一つの検出結果を出力する。そして、物体追跡部5が、検出及び統合された各他車両を追跡する。
処理はステップS105に進み、自車位置推定装置2は、位置検出センサを用いて、自車両50の絶対位置を計測する。処理はステップS107に進み、地図取得装置3は、自車両50が走行する道路の構造を示す地図情報を取得する。処理はステップS109に進み、地図内位置演算部6は、ステップS105で計測された自車両50の絶対位置、及びステップS107で取得された地図データから、地図上における自車両50の位置を推定する。
処理はステップS111に進み、意図予測部12は、他車両51及び他車両52の挙動(進路)を予測する。図2に示す例では、意図予測部12は、他車両51の位置、向き、姿勢、ターンシグナルの点灯の有無などに基づいて、他車両51が次の交差点を右折する予定であると予測する。
処理はステップS113に進み、死角領域算出部13は、物体検出装置1によって検出された他車両51の位置に基づいて、他車両51によって形成される、自車両50の死角領域Rを算出する。処理はステップS115に進み、進入タイミング推測部14は、他車両52が検出された後に他車両52が直進した場合の、他車両52が検出された時から他車両52が死角領域Rに進入するまでの時間である検出可能時間T1を推測する。
処理はステップS119に進み、進入判定部15は、検出可能時間T1が経過する前に、他車両52が死角領域Rに進入したか否かを判定する。検出可能時間T1が経過する前に、他車両52が死角領域Rに進入した場合(ステップS119でYes)、処理はステップS121、ステップS125に進む。
ステップS121において、物体検出装置1は、他車両52が死角領域Rに進入する直前における他車両52と自車両50との距離を取得する。処理はステップS123に進み、進路予測部17は、ステップS121で取得された距離に基づいて他車両52の挙動が変化した可能性を変更する。本実施形態において、移動物体の挙動の変化とは、移動物体の車線変更、左折、右折のいずれかを意味する。例えば、図4に示す例において、他車両52と自車両50との距離(図示しない)が短いほど、進路予測部17は、他車両52が車線変更した可能性を増加させる。センサの誤差は、自車両50からの距離が短いほど小さいからである。
ステップS125において、軌道取得部16は、他車両52が検出された時から他車両52が死角領域Rに進入する直前までの、他車両52の軌道(他車両52の車線上の位置)を取得する。処理はステップS127に進み、進路予測部17は、ステップS125で取得された軌道に基づいて他車両52の挙動が変化した可能性を増加させる。例えば、図4に示す例において、他車両52が検出された時から他車両52が死角領域Rに進入する直前までの、他車両52の軌道が直進を示す軌道と異なる場合、進路予測部17は、他車両52が車線変更した可能性を増加させる。また、図11に示す例において、他車両52が検出された時から他車両52が側道70に進入するまでの、他車両52の軌道が直進を示す軌道と異なる場合、進路予測部17は、他車両52は左折した可能性を増加させる。なお、進路予測部17は、ステップS121、123、125、127に係る処理を行うことなく、他車両52の進路を予測してもよい。換言すれば、検出可能時間T1が経過する前に、他車両52が死角領域Rに進入したことのみに基づいて、進路予測部17は他車両52が車線変更した、左折した、あるいは右折したと予測してもよい。なお、図11に示す例において、他車両52が検出された時から他車両52が死角領域Rに進入する直前までの、他車両52の軌道が走行車線の左側(路肩側)を走行する軌道を示す場合、進路予測部17は、他車両52が左折した可能性を増加させ、他車両52は左折したと予測してもよい。
一方、検出可能時間T1が経過した後に、他車両52が死角領域Rに進入した場合(ステップS119でNo)、処理はステップS129に進む。ステップS129において、進路予測部17は、他車両52が検出された時から他車両52が死角領域Rに進入する直前までの、他車両52の軌道を取得する。他車両52の軌道が直進を示す場合、進路予測部17は、他車両52が直進した可能性を増加させ、他車両52は直進したと予測する(ステップS137)。一方、他車両52の軌道が取得されない場合(ステップS129でNo)、処理はステップS131に進み、進路予測部17は、他車両52が死角領域Rに進入する直前の他車両52の速度変化を取得する。処理はステップS133に進み、進路予測部17は、ステップS131で取得された速度変化に基づいて他車両52が直進した可能性を増加させる。なお、進路予測部17は、ステップS129、131、133に係る処理を行うことなく、他車両52の進路を予測してもよい。換言すれば、検出可能時間T1が経過した後に、他車両52が死角領域Rに進入したことのみに基づいて、進路予測部17は他車両52が直進したと予測してもよい。
なお、車両挙動予測装置は、予測した他車両52の進路に基づいて自車両を制御してもよい。この点について図16を参照して説明する。
ステップS201において、車両制御部30は、進路予測部17によって予測された他車両52の進路を取得する。処理は、ステップS203に進み、車両制御部30は、予め設定された自車両50の進路を取得する。
処理はステップS205に進み、車両制御部30は、他車両52の進路が自車両50の進路と交差するか否かを判定する。他車両52の進路が自車両50の進路と交差する場合(ステップS205でYes)、処理はステップS207に進み、車両制御部30は、他車両52が走行する道路が優先道路か否かを判定する。優先道路の判断は、道路構造、道路標識、交通規則などに基づいて行われる。他車両52が走行する道路が優先道路である場合(ステップS207でYes)、処理はステップS209に進み、車両制御部30は、自車両50を減速または停止させるための速度プロファイルを算出する。速度プロファイルとは、自車両50の速度を時間の関数として示すものである。図4に示す例では、他車両52の進路が自車両50の進路と交差し、かつ他車両52が走行する道路が優先道路である。この場合、車両制御部30は他車両52の通過を待つために、自車両50を減速または停止させるための速度プロファイルを算出する。処理はステップS217に進み、車両制御部30は速度プロファイルに基づいてブレーキアクチュエータなどを制御して自動運転制御を実行する。これにより、急減速は抑制される。
他車両52の進路が自車両50の進路と交差しない場合(ステップS205でNo)、処理はステップS211に進み、車両制御部30は、他車両52の進路の可能性の高さに応じて速度プロファイルを算出する。図3に示すように、他車両52は直進した可能性が高い場合、車両制御部30は一定の速度を示す速度プロファイルを算出する。処理はステップS217に進み、車両制御部30は速度プロファイルに基づいて自動運転制御を実行する。これにより、スムーズな自動運転が実現する。
他車両52が走行する道路が優先道路でない場合(ステップS207でNo)、つまり自車両50が走行する道路が優先道路である場合、処理はステップS215に進む。ステップS215において、車両制御部30は一定の速度を示す速度プロファイルを算出する。処理はステップS217に進み、車両制御部30は速度プロファイルに基づいて自動運転制御を実行する。これにより、スムーズな自動運転が実現する。
以上説明したように、本実施形態に係る車両挙動予測装置によれば、以下の作用効果が得られる。
物体検出装置1は、自車両50の前方または側方の物体(他車両51または建物80)を検出する。また、物体検出装置1は、自車両50の前方または側方の物体の自車両50に対する位置を検出する。また、物体検出装置1は、自車両50から見て物体より遠方を走行する移動物体(他車両52)を検出する。死角領域算出部13は、物体検出装置1によって検出された物体の位置に基づいて、物体により形成される、自車両50の死角領域Rを算出する。進入タイミング推測部14は、移動物体を検出した後に移動物体が直進した場合の、移動物体を検出した時から移動物体が死角領域Rに進入するまでの時間である検出可能時間T1を推測する。進入判定部15は、検出可能時間T1が経過する前に、移動物体が死角領域Rに進入したか否かを判定する。車両制御部30は、判定した結果に基づいて、移動物体の進路を予測する。図4に示す例では、検出可能時間T1が経過する前に、他車両52(移動物体)が死角領域Rに進入した場合、進路予測部17は、他車両52は車線変更したと予測する。したがって、本実施形態に係る車両挙動予測装置は、移動物体の進路を早期に予測することができる。なお、上述したように、自車両50の前方または側方の物体は、移動物体(他車両51)でもよく、静止物体(建物80)でもよい。また、他車両51は、自車両50と同じ道路を自車両50が走行する方向と逆の方向に走行する対向車両である。また、静止物体は建物80に限定されない。静止物体は駐車車両を含む。また、検出可能時間T1は、他車両52が検出された後に他車両52が所定の進路で進行した場合の、他車両52が検出された時から他車両52が死角領域Rに進入するまでの時間であってもよい。所定の進路とは、直進と車線変更を含む。物体検出装置1は、推測した検出可能時間T1と、他車両52が検出された時から他車両52が実際に死角領域Rに進入するまでの時間である実際の検出可能時間とを比較し、比較した結果に基づいて、他車両52の進路を予測してもよい。
移動物体が走行する道路が複数の車線で構成され、自車両50が移動物体を検出した際に移動物体が複数の車線のうち、自車両50から見て最も遠い車線以外を走行している場合において、進入判定部15が、検出可能時間T1が経過する前に、移動物体が死角領域Rに進入したと判定した場合、進路予測部17は移動物体が車線変更したと予測する。図2に示す例では、他車両52(移動物体)が走行する道路が複数の車線(2車線)で構成され、自車両50が他車両52を検出した際に他車両52が複数の車線のうち、自車両50から見て最も遠い車線以外を走行している。図2において、他車両52が走行する車線のうち、自車両50から見て最も遠い車線とは左側車線である。図2において、他車両52は右側車線を走行している。そして、図4に示すように、検出可能時間T1が経過する前に、他車両52が死角領域Rに進入した場合、進路予測部17は、他車両52は車線変更したと予測する。したがって、本実施形態に係る車両挙動予測装置は、移動物体の進路を早期に予測することができる。
移動物体が走行する道路の左側に進入可能な場所が存在する場合において、進入判定部15が、検出可能時間T1が経過する前に、移動物体が死角領域Rに進入したと判定した場合、進路予測部17は移動物体が左折したと予測する。図9に示す例では、他車両52(移動物体)が走行する道路の左側に進入可能な場所(側道70)が存在する。そして、図11に示すように、検出可能時間T1が経過する前に、他車両52が死角領域Rに進入した場合、進路予測部17は、他車両52は左折したと予測する。したがって、本実施形態に係る車両挙動予測装置は、移動物体の進路を早期に予測することができる。
移動物体が走行する道路の右側に進入可能な場所が存在する場合において、進入判定部15が、検出可能時間T1が経過する前に、移動物体が死角領域Rに進入したと判定した場合、進路予測部17は移動物体が右折したと予測する。図12に示す例では、他車両52(移動物体)が走行する道路の右側に進入可能な場所(駐車場90)が存在する。そして、図14に示すように、検出可能時間T1が経過する前に、他車両52が死角領域Rに進入した場合、進路予測部17は、他車両52は右折したと予測する。したがって、本実施形態に係る車両挙動予測装置は、移動物体の進路を早期に予測することができる。
進入判定部15が、検出可能時間T1が経過する前に、移動物体が死角領域Rに進入したと判定した場合、進路予測部17は移動物体と自車両50との距離が短いほど、移動物体の挙動が変化した可能性を増加させる。本実施形態において、移動物体の挙動の変化とは、移動物体の車線変更、左折、右折のいずれかを意味する。つまり、進路予測部17は移動物体と自車両50との距離が短いほど、移動物体は車線変更した可能性、または左折した可能性、または右折した可能性を増加させる。センサの誤差は、自車両50からの距離が短いほど小さいため、上述したように、進路予測部17は可能性を増加させることにより、精度よく移動物体の進路を予測することができる。
進入判定部15が、検出可能時間T1が経過する前に、移動物体が死角領域Rに進入したと判定した場合、進路予測部17は移動物体が検出された時から移動物体が死角領域Rに進入する直前までの、移動物体の軌道に基づいて移動物体の挙動が変化した可能性を増加させる。図4に示す例において、他車両52(移動物体)が検出された時から他車両52が死角領域Rに進入する直前までの、他車両52の軌道が直進を示す軌道と異なる場合、進路予測部17は、他車両52が車線変更した可能性を増加させる。このように、進路予測部17は移動物体の軌道に基づいて移動物体の挙動が変化した可能性を増加させることにより、精度よく移動物体の進路を予測することができる。
進入判定部15が、検出可能時間T1が経過した後に、移動物体が死角領域Rに進入したと判定した場合、進路予測部17は移動物体が直進したと予測する。これにより、図3に示すように、自車両50は他車両52(移動物体)を待つことなく交差点を通過できる。すなわち、自車両50のスムーズな走行に寄与する。
進入判定部15が、検出可能時間T1が経過した後に、移動物体が死角領域Rに進入したと判定した場合、進路予測部17は移動物体と自車両50との距離が短いほど、移動物体が直進した可能性を増加させてもよい。また、移動物体が検出された時から移動物体が死角領域Rに進入する直前までの、移動物体の軌道が直進を示す場合、進路予測部17は他車両52が直進した可能性を増加させてもよい。進路予測部17は可能性を増加させることにより、精度よく移動物体の進路を予測することができる。
車両制御部30は、進路予測部17によって予測された他車両52の進路に基づいて、自車両50の速度プロファイルを算出する。そして、車両制御部30は、算出した速度プロファイルに基づいて自車両50を制御する。これにより、急減速の抑制、またはスムーズな自動運転が実現しうる。例えば、図4に示すように、他車両52の進路が自車両50の進路と交差し、かつ他車両52が走行する道路が優先道路である場合、車両制御部30は他車両52の通過を待つために、自車両50を減速または停止させるための速度プロファイルを算出する。車両制御部30は速度プロファイルに基づいてブレーキアクチュエータなどを制御して自動運転制御を実行する。これにより、急減速は抑制される。
また、移動物体の進路が自車両50の進路と交差し、かつ、自車両50が走行する道路が優先道路である場合、車両制御部30は、一定の速度を示す速度プロファイルを算出し、この速度プロファイルに基づいて自車両50を制御してもよい。また、移動物体の進路が自車両50の進路と交差しない場合、車両制御部30は、一定の速度を示す速度プロファイルを算出し、この速度プロファイルに基づいて自車両50を制御してもよい。これにより、スムーズな自動運転が実現する。
上述の実施形態に記載される各機能は、1または複数の処理回路により実装され得る。処理回路は、電気回路を含む処理装置等のプログラムされた処理装置を含む。処理回路は、また、記載された機能を実行するようにアレンジされた特定用途向け集積回路(ASIC)や回路部品等の装置を含む。また、車両挙動予測装置は、コンピュータの機能を改善しうる。
上記のように、本発明の実施形態を記載したが、この開示の一部をなす論述及び図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかとなろう。
1 物体検出装置
2 自車位置推定装置
3 地図取得装置
4 検出統合部
5 物体追跡部
6 地図内位置演算部
10 挙動予測部
11 車線判定部
12 意図予測部
13 死角領域算出部
14 進入タイミング推測部
15 進入判定部
16 軌道取得部
17 進路予測部
30 車両制御部
2 自車位置推定装置
3 地図取得装置
4 検出統合部
5 物体追跡部
6 地図内位置演算部
10 挙動予測部
11 車線判定部
12 意図予測部
13 死角領域算出部
14 進入タイミング推測部
15 進入判定部
16 軌道取得部
17 進路予測部
30 車両制御部
Claims (17)
- 自車両に搭載されたセンサを用いて前記自車両の前方または側方の物体の前記自車両に対する位置を検出し、
前記センサを用いて前記自車両から見て前記物体より遠方を走行する移動物体を検出し、
前記位置に基づいて、前記物体により形成される、前記センサが検出することができない前記自車両の死角領域を算出し、
前記移動物体を検出した後に前記移動物体が所定の進路で進行した場合の、前記移動物体を検出した時から前記移動物体が前記死角領域に進入するまでの時間である検出可能時間を推測し、
推測した前記検出可能時間と、前記移動物体を検出した時から前記移動物体が実際に前記死角領域に進入するまでの時間である実際の検出可能時間とを比較し、
比較した結果に基づいて、前記移動物体の進路を予測する
ことを特徴とする車両挙動予測方法。 - 前記所定の進路は直進であり、
推測した前記検出可能時間よりも前記実際の検出可能時間が短いか否かを比較した結果に基づいて、前記移動物体の進路を予測する
ことを特徴とする請求項1に記載の車両挙動予測方法。 - 前記物体は、前記自車両と同じ道路を前記自車両が走行する方向と逆の方向に走行する対向車両である
ことを特徴とする請求項1または2に記載の車両挙動予測方法。 - 前記物体は、静止物体である
ことを特徴とする請求項1または2に記載の車両挙動予測方法。 - 前記所定の進路は直進であり、前記移動物体が走行する道路が複数の車線で構成され、前記自車両が前記移動物体を検出した際に前記移動物体が前記複数の車線のうち、前記自車両から見て最も遠い車線以外を走行している場合において、
推測した前記検出可能時間よりも前記実際の検出可能時間が短い場合、前記移動物体は車線変更したと予測する
ことを特徴とする請求項1~4のいずれか1項に記載の車両挙動予測方法。 - 前記所定の進路は直進であり、前記移動物体が走行する道路の左側に進入可能な場所が存在する場合において、
推測した前記検出可能時間よりも前記実際の検出可能時間が短い場合、前記移動物体は左折したと予測する
ことを特徴とする請求項1~5のいずれか1項に記載の車両挙動予測方法。 - 前記所定の進路は直進であり、前記移動物体が走行する道路の右側に進入可能な場所が存在する場合において、
推測した前記検出可能時間よりも前記実際の検出可能時間が短い場合、前記移動物体は右折したと予測する
ことを特徴とする請求項1~6のいずれか1項に記載の車両挙動予測方法。 - 前記所定の進路は直進であり、推測した前記検出可能時間よりも前記実際の検出可能時間が短い場合、前記移動物体と前記自車両との距離が短いほど、前記移動物体の挙動が変化した可能性を増加させ、
前記可能性及び前記比較した結果に基づいて、前記移動物体の進路を予測する
ことを特徴とする請求項1~7のいずれか1項に記載の車両挙動予測方法。 - 前記所定の進路は直進であり、推測した前記検出可能時間よりも前記実際の検出可能時間が短い場合、前記移動物体を検出した時から前記移動物体が前記死角領域に進入する直前までの、前記移動物体の軌道に基づいて前記移動物体の挙動が変化した可能性を増加させ、
前記可能性及び前記比較した結果に基づいて、前記移動物体の進路を予測する
ことを特徴とする請求項1~7のいずれか1項に記載の車両挙動予測方法。 - 前記所定の進路は直進であり、前記実際の検出可能時間が推測した前記検出可能時間以上で場合、前記移動物体は直進したと予測する
ことを特徴とする請求項1~9のいずれか1項に記載の車両挙動予測方法。 - 前記移動物体と前記自車両との距離が短いほど、前記移動物体が直進した可能性を増加させ、または、前記移動物体を検出した時から前記移動物体が前記死角領域に進入する直前までの、前記移動物体の軌道に基づいて前記移動物体が直進した可能性を増加させ、
前記移動物体は直進したと予測する
ことを特徴とする請求項10に記載の車両挙動予測方法。 - 前記移動物体の進路の予測結果に基づいて、前記自車両の速度を時間の関数として示す速度プロファイルを算出する
ことを特徴とする請求項1~11のいずれか1項に記載の車両挙動予測方法。 - 請求項12に記載された車両挙動予測方法を用いて前記自車両を制御する車両制御方法であって、
前記移動物体の進路が前記自車両の進路と交差し、かつ、前記移動物体が走行する道路が優先道路である場合、前記自車両を減速または停止させるための前記速度プロファイルを算出し、
前記速度プロファイルに基づいて前記自車両を制御する
ことを特徴とする車両制御方法。 - 請求項12に記載された車両挙動予測方法を用いて前記自車両を制御する車両制御方法であって、
前記移動物体の進路が前記自車両の進路と交差し、かつ、前記自車両が走行する道路が優先道路である場合、一定の速度を示す前記速度プロファイルを算出し、
前記速度プロファイルに基づいて前記自車両を制御する
ことを特徴とする車両制御方法。 - 請求項12に記載された車両挙動予測方法を用いて前記自車両を制御する車両制御方法であって、
前記移動物体の進路が前記自車両の進路と交差しない場合、一定の速度を示す前記速度プロファイルを算出し、
前記速度プロファイルに基づいて前記自車両を制御する
ことを特徴とする車両制御方法。 - 自車両の前方または側方の物体の前記自車両に対する位置、及び前記自車両から見て前記物体より遠方を走行する移動物体を検出するセンサと、
制御部とを備え、
前記制御部は、
前記センサによって検出された前記位置に基づいて、前記物体により形成される、前記センサが検出することができない前記自車両の死角領域を算出し、
前記センサによって前記移動物体が検出された後に前記移動物体が所定の進路で進行した場合の、前記移動物体を検出した時から前記移動物体が前記死角領域に進入するまでの時間である検出可能時間を推測し、
前記検出可能時間と、前記移動物体を検出した時から前記移動物体が実際に前記死角領域に進入するまでの時間である実際の検出可能時間とを比較し、
比較した結果に基づいて、前記移動物体の進路を予測する
ことを特徴とする車両挙動予測装置。 - 前記所定の進路は直進であり、
前記制御部は、
推測した前記検出可能時間よりも前記実際の検出可能時間が短いか否かを比較した結果に基づいて、前記移動物体の進路を予測する
ことを特徴とする請求項16に記載の車両挙動予測装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/IB2018/001582 WO2020058740A1 (ja) | 2018-09-17 | 2018-09-17 | 車両挙動予測方法及び車両挙動予測装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2020058740A1 JPWO2020058740A1 (ja) | 2021-08-30 |
| JP7031005B2 true JP7031005B2 (ja) | 2022-03-07 |
Family
ID=69888388
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020547454A Active JP7031005B2 (ja) | 2018-09-17 | 2018-09-17 | 車両挙動予測方法及び車両挙動予測装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11302197B2 (ja) |
| EP (1) | EP3855408B1 (ja) |
| JP (1) | JP7031005B2 (ja) |
| KR (1) | KR102657973B1 (ja) |
| CN (1) | CN112703541B (ja) |
| RU (1) | RU2762150C1 (ja) |
| WO (1) | WO2020058740A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021053390A1 (en) * | 2019-09-17 | 2021-03-25 | Mobileye Vision Technologies Ltd. | Systems and methods for predicting blind spot incursions |
| JP7289760B2 (ja) * | 2019-09-18 | 2023-06-12 | 日立Astemo株式会社 | 電子制御装置 |
| CN111942407B (zh) * | 2020-07-31 | 2022-09-23 | 商汤集团有限公司 | 轨迹预测方法、装置、设备及存储介质 |
| US12542054B2 (en) | 2021-11-19 | 2026-02-03 | Qualcomm Incorporated | Managing vehicle behavior based on predicted behavior of other vehicles |
| US20230159025A1 (en) * | 2021-11-19 | 2023-05-25 | Qualcomm Incorporated | Managing Vehicle Behavior Based On Predicted Behavior Of Other Vehicles |
| CN116639151B (zh) * | 2023-05-30 | 2023-11-28 | 武汉理工大学 | 基于人行道盲区行人存在性预测的无人车控制方法及系统 |
| KR20250007871A (ko) * | 2023-07-06 | 2025-01-14 | 현대자동차주식회사 | 자율 주행 제어 장치 및 그 방법 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006227811A (ja) | 2005-02-16 | 2006-08-31 | Denso Corp | 運転支援装置 |
| JP2008041058A (ja) | 2006-08-10 | 2008-02-21 | Sumitomo Electric Ind Ltd | 死角移動体を報知するための報知システム、画像処理装置、車載装置及び報知方法 |
| JP2011028770A (ja) | 2010-09-13 | 2011-02-10 | Mitsubishi Electric Corp | 車載装置、交通情報システム、車載装置の車載情報処理方法および車載装置の車載情報処理プログラム |
| JP2012014257A (ja) | 2010-06-29 | 2012-01-19 | Toyota Motor Corp | 警報装置 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4768499B2 (ja) | 2006-04-17 | 2011-09-07 | アルパイン株式会社 | 車載周辺他車検出装置 |
| JP4709099B2 (ja) * | 2006-08-30 | 2011-06-22 | 三菱電機株式会社 | 評価装置、交通情報システム、車載装置、評価装置の評価方法、交通情報システムの交通情報処理方法、車載装置の車載情報処理方法、評価装置の評価プログラムおよび車載装置の車載情報処理プログラム |
| JP5469430B2 (ja) | 2009-10-23 | 2014-04-16 | 富士重工業株式会社 | 右折時運転支援装置 |
| RU2546547C1 (ru) * | 2011-04-13 | 2015-04-10 | Ниссан Мотор Ко., Лтд. | Устройство помощи при вождении и способ обнаружения транспортного средства рядом с ним |
| CN103609101A (zh) * | 2011-06-16 | 2014-02-26 | 爱信精机株式会社 | 车辆周边监视装置 |
| JP5895258B2 (ja) * | 2011-12-22 | 2016-03-30 | 三洋テクノソリューションズ鳥取株式会社 | 移動体通信装置及び走行支援方法 |
| BR112015000983A2 (pt) * | 2012-07-17 | 2017-06-27 | Nissan Motor | sistema de assistência de condução e método de assistência de condução |
| US20150232028A1 (en) * | 2014-02-14 | 2015-08-20 | Magnadyne Corporation | Exterior Mirror Blind Spot Warning Display and Video Camera |
| WO2015152304A1 (ja) * | 2014-03-31 | 2015-10-08 | エイディシーテクノロジー株式会社 | 運転支援装置、及び運転支援システム |
| JP2017114155A (ja) * | 2015-12-21 | 2017-06-29 | 三菱自動車工業株式会社 | 運転支援装置 |
| US9994151B2 (en) * | 2016-04-12 | 2018-06-12 | Denso International America, Inc. | Methods and systems for blind spot monitoring with adaptive alert zone |
| US10380439B2 (en) * | 2016-09-06 | 2019-08-13 | Magna Electronics Inc. | Vehicle sensing system for detecting turn signal indicators |
| JP6332384B2 (ja) * | 2016-09-29 | 2018-05-30 | マツダ株式会社 | 車両用物標検出システム |
| KR101827698B1 (ko) * | 2016-11-01 | 2018-02-12 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| US20190333373A1 (en) * | 2017-01-20 | 2019-10-31 | Nissan Motor Co., Ltd. | Vehicle Behavior Prediction Method and Vehicle Behavior Prediction Apparatus |
| US10453344B2 (en) * | 2017-02-16 | 2019-10-22 | Panasonic Intellectual Corporation Of America | Information processing apparatus and non-transitory recording medium |
| WO2018158911A1 (ja) * | 2017-03-02 | 2018-09-07 | 日産自動車株式会社 | 運転支援方法及び運転支援装置 |
| JP6768604B2 (ja) * | 2017-07-03 | 2020-10-14 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| US11150342B2 (en) * | 2017-09-07 | 2021-10-19 | Magna Electronics Inc. | Vehicle radar sensing system with surface segmentation using interferometric statistical analysis |
| CN109801508B (zh) * | 2019-02-26 | 2021-06-04 | 百度在线网络技术(北京)有限公司 | 路口处障碍物的运动轨迹预测方法及装置 |
| CN111272165B (zh) * | 2020-02-27 | 2020-10-30 | 清华大学 | 一种基于特征点标定的智能车定位方法 |
-
2018
- 2018-09-17 EP EP18933829.6A patent/EP3855408B1/en active Active
- 2018-09-17 US US17/276,221 patent/US11302197B2/en active Active
- 2018-09-17 KR KR1020217008557A patent/KR102657973B1/ko active Active
- 2018-09-17 JP JP2020547454A patent/JP7031005B2/ja active Active
- 2018-09-17 RU RU2021110514A patent/RU2762150C1/ru active
- 2018-09-17 CN CN201880097536.6A patent/CN112703541B/zh active Active
- 2018-09-17 WO PCT/IB2018/001582 patent/WO2020058740A1/ja not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006227811A (ja) | 2005-02-16 | 2006-08-31 | Denso Corp | 運転支援装置 |
| JP2008041058A (ja) | 2006-08-10 | 2008-02-21 | Sumitomo Electric Ind Ltd | 死角移動体を報知するための報知システム、画像処理装置、車載装置及び報知方法 |
| JP2012014257A (ja) | 2010-06-29 | 2012-01-19 | Toyota Motor Corp | 警報装置 |
| JP2011028770A (ja) | 2010-09-13 | 2011-02-10 | Mitsubishi Electric Corp | 車載装置、交通情報システム、車載装置の車載情報処理方法および車載装置の車載情報処理プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20210057054A (ko) | 2021-05-20 |
| CN112703541A (zh) | 2021-04-23 |
| EP3855408B1 (en) | 2022-11-02 |
| CN112703541B (zh) | 2022-09-20 |
| US20220028274A1 (en) | 2022-01-27 |
| WO2020058740A1 (ja) | 2020-03-26 |
| KR102657973B1 (ko) | 2024-04-16 |
| RU2762150C1 (ru) | 2021-12-16 |
| US11302197B2 (en) | 2022-04-12 |
| JPWO2020058740A1 (ja) | 2021-08-30 |
| EP3855408A4 (en) | 2021-09-22 |
| EP3855408A1 (en) | 2021-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7031005B2 (ja) | 車両挙動予測方法及び車両挙動予測装置 | |
| US20210146958A1 (en) | Vehicle control system | |
| CN110709911B (zh) | 行驶辅助装置的行驶辅助方法以及行驶辅助装置 | |
| JP6798611B2 (ja) | 走行支援方法及び走行支援装置 | |
| CN110352450B (zh) | 驾驶辅助方法及驾驶辅助装置 | |
| JP7037956B2 (ja) | 車両進路予測方法、車両走行支援方法及び車両進路予測装置 | |
| JP7182376B2 (ja) | 運転支援方法及び運転支援装置 | |
| JP7277215B2 (ja) | 挙動予測方法及び挙動予測装置並びに車両制御装置 | |
| JP7398236B2 (ja) | 車両制御方法及び車両制御装置 | |
| JP7167977B2 (ja) | 車両走行支援方法及び車両走行支援装置 | |
| JP7147836B2 (ja) | 車両挙動予測方法及び車両挙動予測装置 | |
| JP2019151261A (ja) | 運転特性推定方法及び運転特性推定装置 | |
| JP7274329B2 (ja) | 車両挙動予測方法及び車両挙動予測装置並びに車両制御装置 | |
| JP7143893B2 (ja) | 車両挙動予測方法及び車両挙動予測装置 | |
| WO2018198163A1 (ja) | 周囲状況予測方法及び周囲状況予測装置 | |
| WO2018198186A1 (ja) | 走行支援方法及び走行支援装置 | |
| US12115999B2 (en) | Method for predicting behavior of other vehicle, device for predicting behavior of other vehicle, and driving assistance method | |
| JP7681504B2 (ja) | 歩行者横断予測方法及び歩行者横断予測装置 | |
| JP7223588B2 (ja) | 運転特性推定方法及び運転特性推定装置 | |
| WO2025134343A1 (ja) | 走行制御方法及び走行制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210311 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220125 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220222 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7031005 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |