JP7059652B2 - 車両制御システム - Google Patents
車両制御システム Download PDFInfo
- Publication number
- JP7059652B2 JP7059652B2 JP2018010918A JP2018010918A JP7059652B2 JP 7059652 B2 JP7059652 B2 JP 7059652B2 JP 2018010918 A JP2018010918 A JP 2018010918A JP 2018010918 A JP2018010918 A JP 2018010918A JP 7059652 B2 JP7059652 B2 JP 7059652B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- range
- traveling
- branch
- travel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/04—Traffic conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/182—Selecting between different operative modes, e.g. comfort and performance modes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/082—Selecting or switching between different modes of propelling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/10—Interpretation of driver requests or demands
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0011—Planning or execution of driving tasks involving control alternatives for a single driving scenario, e.g. planning several paths to avoid obstacles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/406—Traffic density
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Traffic Control Systems (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Business, Economics & Management (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Navigation (AREA)
Description
前記車両制御システムは、制御装置を備える。
前記制御装置は、自車位置認識部と、外界認識部と、行動計画生成部と、走行パス生成部と、走行制御部と、を有する。
前記自車位置認識部は、自車両の現在位置を認識する。
前記外界認識部は、前記自車両の周辺物標を認識する。
前記行動計画生成部は、自動運転を行う所定ルートにおける行動計画を生成する。
前記走行パス生成部は、前記行動計画と、前記現在位置と、前記周辺物標と、に基づいて、走行パスを生成する。前記走行パスは、前記自車両が将来において到達すべき目標位置の集まりである。
前記走行制御部は、前記走行パスに基づいて、前記自車両の走行駆動力出力装置、ステアリング装置、ブレーキ装置およびランプ装置の少なくとも1つを制御する。
前記制御装置は、前記走行パスに基づいた本線から分岐路への自動分岐を行う場合に、本線走行用の走行パスから分岐動作用の走行パスへの切り替え前に、路肩を含む前記分岐路上の第1範囲、または、前記分岐路の路肩に繋がる前記本線の路肩上の第2範囲での渋滞の発生の有無を判定する。
前記制御装置は、前記第1範囲または前記第2範囲での渋滞が発生していると判定した場合、前記走行制御部による自動分岐からドライバによる手動分岐への交代通知を行う。
前記制御装置は、前記交代通知に対する前記ドライバからの応答が無い場合、前記分岐動作用の走行パスに基づいた自動分岐を行わずに、前記本線走行用の走行パスに基づいた自動走行を継続する。
前記制御装置は、前記自車両と同じ方向に走行する車両が前記第1範囲に存在する場合、または、前記自車両と同じ方向に走行する車両が前記第2範囲に存在し、尚且つ、前記第2範囲に存在する車両が所定の車間距離条件を満たす場合、前記第1範囲または前記第2範囲での渋滞が発生していると判定する。
先ず、図1乃至図8を参照して本発明の実施の形態1について説明する。
図1は、本発明の実施の形態1に係る車両制御システムの全体構成を示すブロック図である。本システムは、車両に搭載されるシステムである。本システムが搭載される車両(以下、「自車両OV」ともいう。)は、例えば、ディーゼルエンジンやガソリンエンジンなどの内燃機関を動力源とする自動車、電動機を動力源とする電気自動車、内燃機関と電動機を備えるハイブリッド自動車である。電動機は、自車両OVに搭載される二次電池、水素燃料電池、金属燃料電池、アルコール燃料電池などの電池により駆動される。
本システムには、これらのセンサ装置として、ミリ波レーダー14、LiDAR(Laser Imaging Detection and Ranging)16、カメラ18、GPS(Global Positioning System)機器20、車両センサ22および操作検出センサ24が設けられている。
車両制御ECU10は、制御系LAN30にも接続されている。このLAN30には、各種デバイスが接続されている。これらのデバイスは電子制御式のものである。これらのデバイスの各ECU(不図示)と、車両制御ECU10とが、LAN30を介して接続されている。本システムには、これらのデバイスとして、走行駆動力出力装置32、ステアリング装置34、ブレーキ装置36およびランプ装置38が設けられている。
車両制御ECU10は、AV系LAN40にも接続されている。このLAN40は、カーナビ情報等に関するネットワークである。このLAN40には、各種のデバイスが接続されている。本システムには、これらのデバイスの1つとして、ナビゲーション装置42が設けられている。ナビゲーション装置42は、記憶部44を備えている。記憶部44は、HDD(Hard Disk Drive)、フラッシュメモリなどで実現される。記憶部44内には、地図情報データが格納されている。地図情報データには、例えば、道路、交差点、合流点および分岐点などの位置のデータ、道路の形状のデータ(例えば、カーブ、直線の種別、道路の幅、路肩の幅、道路の勾配、カーブの曲率など)、道路の種類のデータ(例えば、高速道路、有料道路、国道など)が含まれている。
図2は、車両制御ECU10の機能ブロック図である。車両制御ECU10は、例えば、自車位置認識部102と、外界認識部104と、行動計画生成部106と、走行パス生成部108と、走行制御部110と、制御切替部112と、表示制御部114と、記憶部116と、を備えている。これらの部102、104、106、108、110、112および114の一部または全部は、車両制御ECU10が備えるCPU(Central Processing Unit)などのプロセッサがプログラムを実行することにより機能する。記憶部116は、ROM(Read Only Memory)、RAM(Random Access Memory)、HDD、フラッシュメモリなどで実現される。プロセッサが実行するプログラムは、記憶部116に予め格納されているものでもよいし、車載インターネット設備などを介して外部装置からダウンロードされたものでもよい。
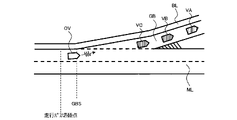
図3は、分岐点付近での走行パスの切り替え例を説明するための図である。既に説明したように、走行パスは、行動計画に基づいて生成される。図3に示す例では、行動計画が、分岐点の手前では本線MLでのレーンキープイベントと、分岐点付近では分岐イベントと、分岐点よりも奥では分岐路GBでのレーンキープイベントと、から構成されている。そのため、図3に示す例では、走行パスが、本線MLでのレーンキープイベント用のものから分岐イベント用のものへと切り替えられ、更には、分岐路GBでのレーンキープイベント用のものへと切り替えられる。図3には、これらの切替点が示されている。なお、分岐イベント用の走行パスへの切替点(左側に示す切替点)は、分岐路始端BGSの手前に設定されているが、当該切替点は分岐路始端BGSよりも奥に設定されていてもよい。
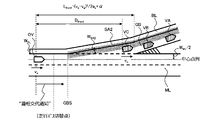
Lfront=(vo-ve)2/2ae+α ・・・(1)
Lrear=(vo-ve)2/2ao+β ・・・(2)
このように、実施の形態1に係る車両制御では、探索範囲SA1、SA2およびSA3を設定し、各探索範囲に条件を満たす周辺車両が存在するか否かの判定を行うことで、走行予定の分岐路上での渋滞の発生を確認できる。また、この分岐路上で渋滞が発生していると判断したときには、運転交代通知を行うことができる。従って、渋滞の発生に起因して自動分岐の安全な実行が困難であるときに、分岐イベント用の走行パスへの切り替え前にドライバに運転交代を要求することができる。従って、自車両OVの分岐動作の安全に行うことが可能となる。
図9は、本発明の実施の形態1において、車両制御ECU10によって実行されるプログラムの一例を説明するフローチャートである。図9に示すルーチンは、分岐点の手前では本線でのレーンキープイベントと、分岐点付近では分岐イベントと、分岐点よりも奥では分岐路でのレーンキープイベントと、を含む行動計画が生成された場合に実行される。
次に、図10乃至図11を参照して本発明の実施の形態2について説明する。なお、実施の形態1と重複する内容の説明については、適宜省略する。
実施の形態1に係る車両制御では、分岐路GB上で渋滞が発生していると判定した場合、運転交代をドライバに要求した。しかし、この要求にドライバが応じない場合が想定される。そこで、実施の形態2では、運転交代通知を行う際、分岐イベント用の走行パスへの切り替えをキャンセルする。また、現在の走行パス(すなわち、本線でのレーンキープイベント用の走行パス)を引き継ぐ。更に、自車両OVが本線上の所定の位置を通過するまでにドライバからの応答が無い場合は、現在の走行パスを更に引き継ぐ。所定の位置は、例えば、分岐路始端の位置に設定されるが、分岐路始端よりも手前側または奥側の位置に設定されてもよい。
このように、実施の形態2に係る車両制御では、運転交代通知を行う際、分岐イベント用の走行パスへの切り替えをキャンセルしつつ、現在の走行パスを引き継ぐ。そのため、運転交代通知にドライバが応じない場合に、本線でのレーンキープイベント用の走行パスに基づいて、自車両OVを走行させることができる。従って、自動分岐の安全な実行が困難であるときに、分岐点付近で自車両OVが停止してしまうのを回避しつつ、本線を走行し続けることができる。
図11は、本発明の実施の形態2において、車両制御ECU10によって実行されるプログラムの一例を説明するフローチャートである。図11に示すルーチンは、図9に示したステップS4に続いて実行される。
102 自車位置認識部
104 外界認識部
106 行動計画生成部
108 走行パス生成部
110 走行制御部
112 制御切替部
114 表示制御部
116 記憶部
BG 分岐路
BGS 分岐路始端
BL 路肩
ML 本線
OV 自車両
SA1、SA2、SA3 探索範囲
VA、VB、VC、VD、VE、VF、VG 周辺車両
Claims (2)
- 自車両の現在位置を認識する自車位置認識部と、
前記自車両の周辺物標を認識する外界認識部と、
自動運転を行う所定ルートにおける行動計画を生成する行動計画生成部と、
前記行動計画と、前記現在位置と、前記周辺物標と、に基づいて、前記自車両が将来において到達すべき目標位置の集まりである走行パスを生成する走行パス生成部と、
前記走行パスに基づいて、前記自車両の走行駆動力出力装置、ステアリング装置、ブレーキ装置およびランプ装置の少なくとも1つを制御する走行制御部と、
を有する制御装置を備える車両制御システムであって、
前記制御装置が、
前記走行パスに基づいた本線から分岐路への自動分岐を行う場合に、本線走行用の走行パスから分岐動作用の走行パスへの切り替え前に、路肩を含む前記分岐路上の第1範囲、または、前記分岐路の路肩に繋がる前記本線の路肩上の第2範囲での渋滞の発生の有無を判定し、
前記第1範囲または前記第2範囲での渋滞が発生していると判定した場合、前記走行制御部による自動分岐からドライバによる手動分岐への交代通知を行い、
前記交代通知に対する前記ドライバからの応答が無い場合、前記分岐動作用の走行パスに基づいた自動分岐を行わずに、前記本線走行用の走行パスに基づいた自動走行を継続する
ように構成されていることを特徴とする車両制御システム。 - 前記制御装置が、
前記自車両と同じ方向に走行する車両が前記第1範囲に存在する場合、または、前記自車両と同じ方向に走行する車両が前記第2範囲に存在し、尚且つ、前記第2範囲に存在する車両が所定の車間距離条件を満たす場合、前記第1範囲または前記第2範囲での渋滞が発生していると判定することを特徴とする請求項1に記載の車両制御システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018010918A JP7059652B2 (ja) | 2018-01-25 | 2018-01-25 | 車両制御システム |
| US16/211,862 US10983516B2 (en) | 2018-01-25 | 2018-12-06 | Vehicle control system |
| CN201910066243.8A CN110077401B (zh) | 2018-01-25 | 2019-01-24 | 车辆控制系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018010918A JP7059652B2 (ja) | 2018-01-25 | 2018-01-25 | 車両制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019127194A JP2019127194A (ja) | 2019-08-01 |
| JP7059652B2 true JP7059652B2 (ja) | 2022-04-26 |
Family
ID=67299986
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018010918A Active JP7059652B2 (ja) | 2018-01-25 | 2018-01-25 | 車両制御システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10983516B2 (ja) |
| JP (1) | JP7059652B2 (ja) |
| CN (1) | CN110077401B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210038601A (ko) * | 2018-07-25 | 2021-04-07 | 에스아이 그룹 스위철랜드 (씨에이치에이에이) 게엠베하 | 조성물 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3530538B1 (en) * | 2018-02-26 | 2022-11-23 | Toyota Jidosha Kabushiki Kaisha | Vehicle control system and vehicle control method |
| JP7087878B2 (ja) * | 2018-02-26 | 2022-06-21 | トヨタ自動車株式会社 | 車両制御システム |
| CN110310484B (zh) * | 2019-07-30 | 2021-04-06 | 东莞开道科技有限公司 | 专属交通系统中车辆的并道方法 |
| CN110641480B (zh) * | 2019-09-27 | 2020-11-03 | 重庆长安汽车股份有限公司 | 基于交通流的自动驾驶功能推送方法、系统及车辆 |
| KR102366073B1 (ko) * | 2020-02-19 | 2022-02-21 | 재단법인대구경북과학기술원 | 주행경로 설정장치 및 주행경로 설정방법 |
| JP7132447B1 (ja) | 2020-12-28 | 2022-09-06 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7524806B2 (ja) | 2021-03-24 | 2024-07-30 | トヨタ自動車株式会社 | 車両制御装置、車両制御用コンピュータプログラム及び車両制御方法 |
| JP7203885B2 (ja) * | 2021-03-31 | 2023-01-13 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| US20260105834A1 (en) * | 2022-09-27 | 2026-04-16 | Sumitomo Electric Industries, Ltd. | Information processing device, signal control device, accumulation length estimating method, signal control method, and computer program |
| JP7642007B2 (ja) | 2023-03-15 | 2025-03-07 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7838515B2 (ja) * | 2023-05-09 | 2026-04-01 | トヨタ自動車株式会社 | 情報処理装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015190212A1 (ja) | 2014-06-10 | 2015-12-17 | クラリオン株式会社 | 車線選択装置、車両制御システム及び車線選択方法 |
| WO2017047261A1 (ja) | 2015-09-17 | 2017-03-23 | 日立オートモティブシステムズ株式会社 | 車線変更制御装置 |
| JP2017097519A (ja) | 2015-11-20 | 2017-06-01 | オムロン株式会社 | 自動運転支援装置、自動運転支援システム、自動運転支援方法、プログラムおよび記録媒体 |
| US20170341653A1 (en) | 2016-05-26 | 2017-11-30 | Honda Motor Co.,Ltd. | Route guidance apparatus and route guidance method |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3520691B2 (ja) * | 1996-09-30 | 2004-04-19 | 株式会社日立製作所 | 移動体制御システム |
| US9388750B2 (en) * | 2013-03-15 | 2016-07-12 | Ford Global Technologies, Llc | System and method for optimizing availability of vehicle energy conserving modes |
| EP2930081B1 (en) * | 2014-04-08 | 2019-03-27 | Volvo Car Corporation | Method for transition between driving modes |
| JP6418634B2 (ja) | 2014-09-29 | 2018-11-07 | 株式会社Subaru | 運転支援制御装置 |
| JP6375237B2 (ja) * | 2015-01-28 | 2018-08-15 | 日立オートモティブシステムズ株式会社 | 自動運転制御装置 |
| JP6545507B2 (ja) * | 2015-03-31 | 2019-07-17 | アイシン・エィ・ダブリュ株式会社 | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム |
| JP6387548B2 (ja) * | 2016-03-14 | 2018-09-12 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| JP2017198633A (ja) * | 2016-04-28 | 2017-11-02 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| JP6337382B2 (ja) * | 2016-05-19 | 2018-06-06 | 本田技研工業株式会社 | 車両制御システム、交通情報共有システム、車両制御方法、および車両制御プログラム |
| US10467581B2 (en) * | 2018-01-19 | 2019-11-05 | Udelv Inc. | Delivery management system |
-
2018
- 2018-01-25 JP JP2018010918A patent/JP7059652B2/ja active Active
- 2018-12-06 US US16/211,862 patent/US10983516B2/en active Active
-
2019
- 2019-01-24 CN CN201910066243.8A patent/CN110077401B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015190212A1 (ja) | 2014-06-10 | 2015-12-17 | クラリオン株式会社 | 車線選択装置、車両制御システム及び車線選択方法 |
| WO2017047261A1 (ja) | 2015-09-17 | 2017-03-23 | 日立オートモティブシステムズ株式会社 | 車線変更制御装置 |
| JP2017097519A (ja) | 2015-11-20 | 2017-06-01 | オムロン株式会社 | 自動運転支援装置、自動運転支援システム、自動運転支援方法、プログラムおよび記録媒体 |
| US20170341653A1 (en) | 2016-05-26 | 2017-11-30 | Honda Motor Co.,Ltd. | Route guidance apparatus and route guidance method |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210038601A (ko) * | 2018-07-25 | 2021-04-07 | 에스아이 그룹 스위철랜드 (씨에이치에이에이) 게엠베하 | 조성물 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110077401A (zh) | 2019-08-02 |
| JP2019127194A (ja) | 2019-08-01 |
| US20190227544A1 (en) | 2019-07-25 |
| US10983516B2 (en) | 2021-04-20 |
| CN110077401B (zh) | 2022-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7059652B2 (ja) | 車両制御システム | |
| JP6965297B2 (ja) | 車両制御装置、車両制御方法、および車両制御プログラム | |
| CN109195845B (zh) | 车辆控制系统、车辆控制方法及存储介质 | |
| JP6768787B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6623501B2 (ja) | 車両制御装置、車両制御方法、および車両制御プログラム | |
| JP6569186B2 (ja) | 車両制御装置、車両制御方法、および車両制御プログラム | |
| JP6246844B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| US10583833B2 (en) | Vehicle control apparatus, vehicle control method, and vehicle control program | |
| JP6275187B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6652417B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| CN109070887B (zh) | 车辆控制系统、车辆控制方法及存储介质 | |
| CN108885828B (zh) | 车辆控制系统、车辆控制方法及存储介质 | |
| JP6270227B2 (ja) | 車両制御装置、車両制御方法、および車両制御プログラム | |
| US20190071075A1 (en) | Vehicle control system, vehicle control method, and vehicle control program | |
| US20190155293A1 (en) | Vehicle control system, vehicle control method and vehicle control program | |
| JPWO2017138513A1 (ja) | 車両制御装置、車両制御方法、および車両制御プログラム | |
| WO2017175377A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017207984A (ja) | 交通状況推定装置、車両制御システム、経路誘導装置、交通状況推定方法、および交通状況推定プログラム | |
| JP2017165153A (ja) | 車両制御装置、車両制御方法、および車両制御プログラム | |
| JP6582339B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6729326B2 (ja) | 自動運転装置 | |
| WO2017168517A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2018037100A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6650331B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017035902A (ja) | 車両制御装置、車両制御方法、および車両制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200224 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210302 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20211026 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220120 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20220120 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20220127 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20220201 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220315 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220328 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7059652 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |