JP7063629B2 - 骨組織に穴を準備する滑り止め付き手術用器具 - Google Patents
骨組織に穴を準備する滑り止め付き手術用器具 Download PDFInfo
- Publication number
- JP7063629B2 JP7063629B2 JP2018003161A JP2018003161A JP7063629B2 JP 7063629 B2 JP7063629 B2 JP 7063629B2 JP 2018003161 A JP2018003161 A JP 2018003161A JP 2018003161 A JP2018003161 A JP 2018003161A JP 7063629 B2 JP7063629 B2 JP 7063629B2
- Authority
- JP
- Japan
- Prior art keywords
- surgical instrument
- slip
- flutes
- certain embodiments
- drill
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1662—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans for particular parts of the body
- A61B17/1671—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans for particular parts of the body for the spine
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1615—Drill bits, i.e. rotating tools extending from a handpiece to contact the worked material
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
- A61B90/92—Identification means for patients or instruments, e.g. tags coded with colour
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B2017/1602—Mills
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
- A61B2090/033—Abutting means, stops, e.g. abutting on tissue or skin
- A61B2090/034—Abutting means, stops, e.g. abutting on tissue or skin abutting on parts of the device itself
- A61B2090/035—Abutting means, stops, e.g. abutting on tissue or skin abutting on parts of the device itself preventing further rotation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/062—Measuring instruments not otherwise provided for penetration depth
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Dentistry (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Robotics (AREA)
- Pathology (AREA)
- Surgical Instruments (AREA)
Description
本出願は、「骨組織に穴を準備する滑り止め付き手術用器具(Anti-Skid Surgical Instrument for use in Preparing Holes in Bone Tissue)」と題する、2016年1月13日出願の米国仮特許出願第62/278,313号と、「骨組織に穴を準備する滑り止め付き手術用器具(Anti-Skid Surgical Instrument for use in Preparing Holes in Bone Tissue)」と題する、2016年9月16日に出願の米国仮特許出願第62/395,795号の優先権を主張し、「骨組織に穴を準備する滑り止め付き手術用器具(Anti-Skid Surgical Instrument for use in Preparing Holes in Bone Tissue)」と題する、2014年7月14日出願の米国特許出願第62/024,402号の優先権を主張する、「骨組織に穴を準備する滑り止め付き手術用器具(Anti-Skid Surgical Instrument for use in Preparing Holes in Bone Tissue)」と題する、2015年7月14日出願の米国特許出願第14/799,170号の一部継続出願であり、それぞれの内容全体が本明細書に参考として組み込まれる。
手術用器具ガイドが取付けられたエンドエフェクタを有するロボットアームであって、手術用器具ガイドが、滑り止め付き手術用器具を通る移動を保持及び/又は制限するよう配置され、
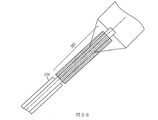
細長構造を有する滑り止め付き手術用器具が、
滑り止め付き手術用器具が骨組織と接触するとき手術用器具の滑り(例、手術用器具の意図しない横移動)が低減された状態で骨組織を取り除くための、細長構造の端部にあるミルヘッドであって、
細長構造の長手方向軸に実質的に垂直である平端部と、細長構造の長手方向軸を中心に骨組織内に切り込むための1つ又は複数の側面切削フルートを有するミルヘッドと、
ミルヘッドから延在するスパイクと、
ドリルに接続するためのシャンクと、
ミルヘッドとシャンクとの間のシャフトであって、取り除いた骨組織を逃がすための1つ又は複数のドリルフルート(例、非切削フルート)を有するシャフトと、を備える滑り止め付き手術用器具と、を備えるロボットアームを具備する、手術用ロボットシステム。
ある実施形態では、深度制御は、深さ止めの位置が変更されたら、滑り止め付き手術用器具の侵入深度が変更するよう、滑り止め付き手術用器具に調節可能に取り付けられた深さ止めを備える。
ある実施形態では、シャフトの長手方向長は、シャンクの長手方向長より大きい。
手術用器具ガイドが取付けられたエンドエフェクタを有するロボットアームであって、
手術用器具ガイドが、滑り止め付き手術用器具を通る移動を保持及び/又は制限するよう配置され、
細長構造を有する滑り止め付き手術用器具が、
滑り止め付き手術用器具が骨組織と接触するとき手術用器具の滑り(例、手術用器具の意図しない横移動)が低減された状態で骨組織を取り除くための、細長構造の端部のミルヘッドであって、
細長構造の長手方向軸に実質的に垂直である平端部と、細長構造の長手方向軸を中心に骨組織内に切り込むための1つ又は複数の側面切削フルートを有するミルヘッドと、
ドリルに接続するためのシャンクと、
ミルヘッドとシャンクとの間のシャフトであって、取り除いた骨組織を逃がすための1つ又は複数のドリルフルート(例、非切削フルート)を有するシャフトと、を備える滑り止め付き手術用器具と、を備えるロボットアームを具備する、手術用ロボットシステム。
手術用器具ガイドが取付けられたエンドエフェクタを有するロボットアームであって、
手術用器具ガイドが、滑り止め付き手術用器具を通る移動を保持及び/又は制限するよう配置され、
細長構造を有する滑り止め付き手術用器具が、
滑り止め付き手術用器具が骨組織と接触するとき手術用器具の滑り(例、手術用器具の意図しない横移動)が低減された状態で骨組織を取り除くための、細長構造の端部のミルヘッドであって、
細長構造の長手方向軸に実質的に垂直である平端部と、細長構造の長手方向軸を中心に骨組織内に切り込むための1つ又は複数の側面切削フルートを有するミルヘッドと、
ドリルに接続するためのシャンクと、
ミルヘッドとシャンクとの間のシャフトであって、取り除いた骨組織を逃がすための1つ又は複数のドリルフルート(例、非切削フルート)を有するシャフトと、手術用器具内に挿管と、を備える滑り止め付き手術用器具と、を備えるロボットアームを具備する、手術用ロボットシステム。
手術用器具ガイドが取付けられたエンドエフェクタを有するロボットアームであって、
手術用器具ガイドが、滑り止め付き手術用器具を通る移動を保持及び/又は制限するよう配置され、
細長構造を有する滑り止め付き手術用器具が、
滑り止め付き手術用器具が骨組織と接触するとき手術用器具の滑り(例、手術用器具の意図しない横移動)が低減された状態で骨組織を取り除くための、細長構造の端部のミルヘッドであって、
細長構造の長手方向軸に実質的に垂直である平端部と、細長構造の長手方向軸を中心に骨組織内に切り込むための1つ又は複数の側面切削フルートを有するミルヘッドと、
ドリルに接続するためのシャンクと、
ミルヘッドとシャンクとの間のシャフトであって、取り除いた骨組織を逃がすための1つ又は複数のドリルフルート(例、非切削フルート)を有するシャフトと、ミルヘッドからのエネルギーを吸収するコンプライアント部と、を備える滑り止め付き手術用器具と、を備えるロボットアームを具備する、手術用ロボットシステム。
手術用器具ガイドが取付けられたエンドエフェクタを有するロボットアームであって、
手術用器具ガイドが、滑り止め付き手術用器具を通る移動を保持及び/又は制限するよう配置され、
細長構造を有する滑り止め付き手術用器具が、
滑り止め付き手術用器具が骨組織と接触するとき手術用器具の滑り(例、手術用器具の意図しない横移動)が低減された状態で骨組織を取り除くための、細長構造の端部のミルヘッドであって、
細長構造の長手方向軸に実質的に垂直である平端部と、細長構造の長手方向軸を中心に骨組織内に切り込むための1つ又は複数の側面切削フルートを有するミルヘッドと、
ドリルに接続するためのシャンクと、
ミルヘッドとシャンクとの間のシャフトであって、取り除いた骨組織を逃がすための1つ又は複数のドリルフルート(例、非切削フルート)を有するシャフトと、深度制御と、を備える滑り止め付き手術用器具と、を備えるロボットアームを具備する、手術用ロボットシステム。
細長構造を有する滑り止め付き手術用器具が、
滑り止め付き手術用器具が骨組織と接触するとき手術用器具の滑り(例、手術用器具の意図しない横移動)が低減された状態で骨組織を取り除くための、細長構造の端部のミルヘッドであって、
細長構造の長手方向軸に実質的に垂直である平端部と、細長構造の長手方向軸を中心に骨組織内に切り込むための1つ又は複数の側面切削フルートを有するミルヘッドと、
ミルヘッドから延在するスパイクと、
ドリルに接続するためのシャンクと、
ミルヘッドとシャンクとの間のシャフトであって、取り除いた骨組織を逃がすための1つ又は複数のドリルフルート(例、非切削フルート)を有するシャフトと、を備える滑り止め付き手術用器具。
細長構造を有する滑り止め付き手術用器具が、
滑り止め付き手術用器具が骨組織と接触するとき手術用器具の滑り(例、手術用器具の意図しない横移動)が低減された状態で骨組織を取り除くための、細長構造の端部のミルヘッドであって、
細長構造の長手方向軸に実質的に垂直である平端部と、細長構造の長手方向軸を中心に骨組織内に切り込むための1つ又は複数の側面切削フルートを有するミルヘッドと、
ドリルに接続するためのシャンクと、
ミルヘッドとシャンクとの間のシャフトであって、取り除いた骨組織を逃がすための1つ又は複数のドリルフルート(例、非切削フルート)を有するシャフトと、を備える滑り止め付き手術用器具。
細長構造を有する滑り止め付き手術用器具が、
滑り止め付き手術用器具が骨組織と接触するとき手術用器具の滑り(例、手術用器具の意図しない横移動)が低減された状態で骨組織を取り除くための、細長構造の端部のミルヘッドであって、
細長構造の長手方向軸に実質的に垂直である平端部と、細長構造の長手方向軸を中心に骨組織内に切り込むための1つ又は複数の側面切削フルートを有するミルヘッドと、
ドリルに接続するためのシャンクと、
ミルヘッドとシャンクとの間のシャフトであって、取り除いた骨組織を逃がすための1つ又は複数のドリルフルート(例、非切削フルート)を有するシャフトと、手術用器具内の挿管と、を備える滑り止め付き手術用器具。
細長構造を有する滑り止め付き手術用器具が、
滑り止め付き手術用器具が骨組織と接触するとき手術用器具の滑り(例、手術用器具の意図しない横移動)が低減された状態で骨組織を取り除くための、細長構造の端部のミルヘッドであって、
細長構造の長手方向軸に実質的に垂直である平端部と、細長構造の長手方向軸を中心に骨組織内に切り込むための1つ又は複数の側面切削フルートを有するミルヘッドと、
ドリルに接続するためのシャンクと、
ミルヘッドとシャンクとの間のシャフトであって、取り除いた骨組織を逃がすための1つ又は複数のドリルフルート(例、非切削フルート)を有するシャフトと、ミルヘッドからのエネルギーを吸収するコンプライアント部と、を備える滑り止め付き手術用器具。
細長構造を有する滑り止め付き手術用器具が、
滑り止め付き手術用器具が骨組織と接触するとき手術用器具の滑り(例、手術用器具の意図しない横移動)が低減された状態で骨組織を取り除くための、細長構造の端部のミルヘッドであって、
細長構造の長手方向軸に実質的に垂直である平端部と、細長構造の長手方向軸を中心に骨組織内に切り込むための1つ又は複数の側面切削フルートを有するミルヘッドと、
ドリルに接続するためのシャンクと、
ミルヘッドとシャンクとの間のシャフトであって、取り除いた骨組織を逃がすための1つ又は複数のドリルフルート(例、非切削フルート)を有するシャフトと、深度制御と、を備える滑り止め付き手術用器具。
Claims (18)
- 手術中に患者の骨組織に穴を準備する滑り止め付き手術用器具であって、
細長構造を有する前記滑り止め付き手術用器具が、
前記細長構造の端部に、前記滑り止め付き手術用器具が前記骨組織と接触するとき前記手術用器具の滑りが低減された状態で骨組織を取り除くためのミルヘッドであって、前記細長構造の長手方向軸に実質的に垂直な平端部と、前記細長構造の前記長手方向軸を中心とした、前記骨組織内に切り込むための1つ又は複数の側面切削フルートを有するミルヘッドと、
ドリルに接続するためのシャンクと、
前記ミルヘッドと前記シャンクとの間のシャフトであって、取り除いた骨組織を逃がすための1つ又は複数のドリルフルートを有するシャフトと、
深度制御と、を備え、
前記深度制御が、前記滑り止め付き手術用器具の回転開始時を表示する第1部分と、前記滑り止め付き手術用器具の回転停止時及び深さ方向への侵入の停止時のうち少なくとも1つを表示する第2部分と、を備える、滑り止め付き手術用器具。 - 前記深度制御が、1つ又は複数のマーキングを備える、請求項1に記載の滑り止め付き手術用器具。
- 前記深度制御が1つ又は複数の色を備える、請求項1に記載の滑り止め付き手術用器具。
- 前記深度制御が、深さ止めを備え、
前記深さ止めは、前記深さ止めの位置が変更されるにつれ、前記滑り止め付き手術用器具の侵入の深さが変化するよう、前記滑り止め付き手術用器具に調整可能に取り付けられる、請求項1に記載の滑り止め付き手術用器具。 - 前記シャフトが、1つ又は複数のノッチを備え、前記深度制御が、前記滑り止め付き手術用器具に取り付けられるとき、前記1つ又は複数のノッチのうち少なくとも1つに係合する、請求項1に記載の滑り止め付き手術用器具。
- 前記ミルヘッドから延在するスパイクを備える、請求項1に記載の滑り止め付き手術用器具。
- 前記ミルヘッドが凹状面を備える、請求項6に記載の滑り止め付き手術用器具。
- 前記手術用器具に挿管を備える、請求項1に記載の滑り止め付き手術用器具。
- 前記挿管が、前記細長構造の端部に穴を備える、請求項8に記載の滑り止め付き手術用器具。
- 前記ミルヘッドからのエネルギーを吸収するコンプライアント部を備える、請求項1に記載の滑り止め付き手術用器具。
- 前記ミルヘッドの前記端部が、前記骨組織に軸方向に切り込む1つ又は複数の端部切削フルートを有する、請求項1に記載の滑り止め付き手術用器具。
- 前記1つ又は複数のドリルフルートが、少なくとも2、3、4、6、8、10、又は20のフルートを備える、請求項1に記載の滑り止め付き手術用器具。
- 1つ又は複数の側面切削フルートが、少なくとも2、3、4、6、8、10、又は20のフルートを備える、請求項1に記載の滑り止め付き手術用器具。
- 前記シャフトの長手方向長が、前記ミルヘッドの長手方向長よりも大きい、請求項1に記載の滑り止め付き手術用器具。
- 前記シャフトの長手方向長が、前記シャンクの長手方向長よりも大きい、請求項1に記載の滑り止め付き手術用器具。
- 前記1つ又は複数のドリルフルートが、前記1つ又は複数の側面切削フルートよりも高いねじれ率を有するか、又は、前記1つ又は複数のドリルフルートが、前記1つ又は複数の側面切削フルートよりも低いねじれ率を有する、請求項1に記載の滑り止め付き手術用器具。
- 前記1つ又は複数のドリルフルートが、前記1つ又は複数の側面切削フルートとは異なるねじれ率を有する、請求項1に記載の滑り止め付き手術用器具。
- 前記手術が、脊椎、整形、歯科、耳、鼻、又は咽喉の手術である、請求項1に記載の滑り止め付き手術用器具。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/405,743 | 2017-01-13 | ||
| US15/405,743 US10765438B2 (en) | 2014-07-14 | 2017-01-13 | Anti-skid surgical instrument for use in preparing holes in bone tissue |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018114273A JP2018114273A (ja) | 2018-07-26 |
| JP7063629B2 true JP7063629B2 (ja) | 2022-05-09 |
Family
ID=60957195
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018003161A Active JP7063629B2 (ja) | 2017-01-13 | 2018-01-12 | 骨組織に穴を準備する滑り止め付き手術用器具 |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3354223A1 (ja) |
| JP (1) | JP7063629B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11559315B2 (en) * | 2019-10-04 | 2023-01-24 | K2M, Inc. | Tools for insertion of a spinal implant and methods of using same |
| US11925426B2 (en) * | 2021-07-16 | 2024-03-12 | DePuy Synthes Products, Inc. | Surgical robot with anti-skive feature |
| US12186914B2 (en) * | 2022-02-02 | 2025-01-07 | Mazor Robotics, Ltd. | Robotic arm guide as a depth stop |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001212151A (ja) | 2000-02-03 | 2001-08-07 | Homuzu Giken:Kk | 骨手術用穿孔ストッパ及び骨手術用穿孔具 |
| JP2003245283A (ja) | 2002-02-22 | 2003-09-02 | Hisaya Okazaki | 穿孔方向可変ドリル刃 |
| US20110098710A1 (en) | 2009-10-27 | 2011-04-28 | Frank Spratt | Preparatory Reamers For Orthopedic Implants |
| JP2015508313A (ja) | 2012-01-23 | 2015-03-19 | ウニヴェルズィテート チューリッヒ | 手術器具 |
| US20160008011A1 (en) | 2014-07-14 | 2016-01-14 | KB Medical SA | Anti-skid surgical instrument for use in preparing holes in bone tissue |
| JP2016209744A (ja) | 2011-04-06 | 2016-12-15 | デピュイ・シンセス・プロダクツ・インコーポレイテッド | 手術器具アセンブリ |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4710075A (en) * | 1986-10-01 | 1987-12-01 | Boehringer Mannheim Corporation | Adjustable drill gauge |
| US5941706A (en) * | 1997-10-20 | 1999-08-24 | Ura; Robert S. | Variable depth medical drill and method of making the same |
| US7048477B2 (en) * | 2003-06-30 | 2006-05-23 | I.D.M.S., L.L.C. | Drill measurement stops |
| DE602004024588D1 (de) * | 2004-02-05 | 2010-01-21 | Bti I & D | Geräte zur extraktion und sammlung von gewebepartikeln bei kühlungsloser bohrmethode mit niedriger drehgeschwindigkeit |
| US8945164B2 (en) * | 2005-10-27 | 2015-02-03 | Medtronic Xomed, Inc. | Guard device for surgical cutting and evoked potential monitoring system |
| US20090024129A1 (en) * | 2007-07-19 | 2009-01-22 | Jeremy Gordon | Perforator with inner and outer drills and a drive head, the inner drill configured to move against the outer drill in order to disengage from the drive head |
| US8226654B2 (en) * | 2008-12-04 | 2012-07-24 | Aeton Medical Llc | Trocar-tipped drill bit |
| US9283048B2 (en) | 2013-10-04 | 2016-03-15 | KB Medical SA | Apparatus and systems for precise guidance of surgical tools |
| US9241771B2 (en) | 2014-01-15 | 2016-01-26 | KB Medical SA | Notched apparatus for guidance of an insertable instrument along an axis during spinal surgery |
| CN106659537B (zh) | 2014-04-24 | 2019-06-11 | Kb医疗公司 | 结合机器人手术系统使用的手术器械固持器 |
| EP3226781B1 (en) * | 2014-12-02 | 2018-08-01 | KB Medical SA | Robot assisted volume removal during surgery |
| EP3258872B1 (en) | 2015-02-18 | 2023-04-26 | KB Medical SA | Systems for performing minimally invasive spinal surgery with a robotic surgical system using a percutaneous technique |
-
2018
- 2018-01-12 JP JP2018003161A patent/JP7063629B2/ja active Active
- 2018-01-12 EP EP18151372.2A patent/EP3354223A1/en not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001212151A (ja) | 2000-02-03 | 2001-08-07 | Homuzu Giken:Kk | 骨手術用穿孔ストッパ及び骨手術用穿孔具 |
| JP2003245283A (ja) | 2002-02-22 | 2003-09-02 | Hisaya Okazaki | 穿孔方向可変ドリル刃 |
| US20110098710A1 (en) | 2009-10-27 | 2011-04-28 | Frank Spratt | Preparatory Reamers For Orthopedic Implants |
| JP2016209744A (ja) | 2011-04-06 | 2016-12-15 | デピュイ・シンセス・プロダクツ・インコーポレイテッド | 手術器具アセンブリ |
| JP2015508313A (ja) | 2012-01-23 | 2015-03-19 | ウニヴェルズィテート チューリッヒ | 手術器具 |
| US20160008011A1 (en) | 2014-07-14 | 2016-01-14 | KB Medical SA | Anti-skid surgical instrument for use in preparing holes in bone tissue |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3354223A1 (en) | 2018-08-01 |
| JP2018114273A (ja) | 2018-07-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11534179B2 (en) | Anti-skid surgical instrument for use in preparing holes in bone tissue | |
| US12082886B2 (en) | Robotic surgical systems for preparing holes in bone tissue and methods of their use | |
| US10945742B2 (en) | Anti-skid surgical instrument for use in preparing holes in bone tissue | |
| JP7487222B2 (ja) | 拡張現実支援外科処置で使用するための患者適合型装置及びそれを使用するための方法 | |
| US11376073B2 (en) | Patient-matched apparatus and methods for performing surgical procedures | |
| US9999444B2 (en) | Depth controlled Jamshidi needle | |
| US20100145340A1 (en) | Introducer Tool for Bone Measurement | |
| EP3442459B1 (en) | Anti-skid surgical instrument for use in preparing holes in bone tissue | |
| US12089857B2 (en) | System for surgical treatment of the spine | |
| US11666367B2 (en) | Guidance apparatus for implantation into bone and related methods of use | |
| US11045210B2 (en) | Flexible spinal driver or drill with a malleable core, and/or fixed core radius | |
| US12290288B2 (en) | Surgical device for insertion of guide wire and pedicle screw | |
| TW201811273A (zh) | 脊椎手術工具及導引脊椎手術工具之方法 | |
| JP7063629B2 (ja) | 骨組織に穴を準備する滑り止め付き手術用器具 | |
| AU2013296509B2 (en) | Depth controlled Jamshidi needle | |
| HK1257574A1 (en) | Anti-skid surgical instrument for use in preparing holes in bone tissue | |
| HK40004597B (en) | Anti-skid surgical instrument for use in preparing holes in bone tissue | |
| WO2008020833A1 (en) | Improved pedicle punch | |
| TW201836557A (zh) | 導引脊椎手術工具之方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210924 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210928 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20211224 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220323 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220412 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220421 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7063629 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |