JP7071092B2 - 駆動装置、光学装置および撮像装置 - Google Patents
駆動装置、光学装置および撮像装置 Download PDFInfo
- Publication number
- JP7071092B2 JP7071092B2 JP2017214438A JP2017214438A JP7071092B2 JP 7071092 B2 JP7071092 B2 JP 7071092B2 JP 2017214438 A JP2017214438 A JP 2017214438A JP 2017214438 A JP2017214438 A JP 2017214438A JP 7071092 B2 JP7071092 B2 JP 7071092B2
- Authority
- JP
- Japan
- Prior art keywords
- drive amount
- range
- lock
- movable member
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Landscapes
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
Description
像ぶれ低減装置は、例えば、光学装置の振れに応じて光学素子または撮像素子等の素子を光軸方向とは異なる方向(例えば光軸に直交する方向)にシフトさせることで、像ぶれを低減させる。
ロック機構は、像ぶれ補正用素子をロックするロック状態と当該ロックを解除するロック解除状態との間で可動なロック部材と、ロック部材を駆動するアクチュエータとを含んで構成されうる。アクチュエータとしてステッピングモータを用いると、その安定位置での自己保持力(ディテントトルク)により、電力を使用せずにロック状態またはロック解除状態にロック部材を保つことができる。
本発明の像ぶれ補正装置10はロック機構を有し、像ぶれ補正用素子のシフト動作を行わせない場合や光学機器の電源が切られている状態で、像ぶれ補正用素子を所定位置(例えば、像ぶれ補正用素子の中心を光学機器の光軸に一致させる位置)に保持する機能を有する。ロックリング(第1可動部材)101はシフトレンズ(第2可動部材)103の可動範囲を制限するロック部材である。詳細については後述する。
ロックリング駆動手段(第1駆動部)102はロックリング101を駆動するためのアクチュエータであり、本実施例ではステッピングモータである。
シフトレンズ駆動手段(第2駆動部)104はシフトレンズ103を駆動するためのアクチュエータであり、本実施例ではボイスコイルモータ(VCM)である。
シフトレンズ位置検出手段(検出部)105はシフトレンズ103の位置を検出するための位置検出手段であり、本実施例では光位置センサ(PSD)である。
有効無効切替手段107は、像ぶれ補正装置10による像ぶれ補正機能の実行、停止を切り替える切替手段であり、本実施例ではオルタネートのスイッチである。
なお、シフトレンズ駆動手段104、シフトレンズ位置検出手段105、振れ検出手段106は光軸に垂直な平面上において、2軸方向のそれぞれに構成されている。シフトレンズ駆動手段104はシフトレンズ103(レンズ装置)の光軸に直交する方向の成分を有するように、シフトレンズ103を駆動する。
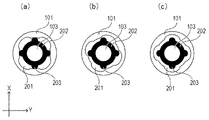
ロックリング101はシフトレンズ103の周上に配置され、先述のロックリング駆動手段102により、シフトレンズ103に対して周方向に回転可能である。
ロックリング101の内周の4箇所には、凹部201が形成されており、一方、シフトレンズ103はレンズ保持枠202を有し、レンズ保持枠202の外周の4箇所には、凸部203が形成されている。
また、図2(b)に示すように、シフトレンズ103が中立位置に保持されておらず、かつ像ぶれ補正装置10が像ぶれを適切に行うために必要な可動範囲未満となる状態がある。この状態をロック不安定状態という。
また、この際、ロックリング規制部に到達した後も駆動のためにモータに通電を続けると、ロックリング駆動手段102のステッピングモータは脱調を繰り返し、通常の駆動では発生しない異音が発生する。
縦軸がシフトレンズ103の可動範囲であり、図2で示すX軸方向におけるシフトレンズ中心からの可動量を示す。
L2はロック状態におけるシフトレンズ103の可動範囲である。
L3はロックリング101の位置を推定するための閾値である。ロックリング位置推定処理についての詳細は後述する。
位置P2はシフトレンズ103の可動範囲がL1となる位置であり、すなわち、シフトレンズ103がロック不安定状態からアンロック状態へと変化する位置である。
なお、位置P4は位置P2と等しいか、よりアンロック側である必要がある。これは、アンロック動作後にシフトレンズ103が、像ぶれ補正装置10が像ぶれを適切に行うために必要な可動範囲を満たす必要があるためである。
範囲R3(第2領域)は位置P3と位置P5の間の範囲であり、範囲R4(第3領域)は位置P5と位置P4の間の範囲である。
まずは、制御手段108によるロックリング101の初期化動作について、図4~6を用いて行う。
S402ではロックリング位置推定処理を行い、S403へと進む。ロックリング位置推定処理についての詳細は後述する。
S403では推定されたロックリング101が位置P5よりロック側かを判断し、ロック側である場合はS404へ、ロック側でない場合はS405へと進む。
S405ではロックリング101をロック方向(第1方向、第2方向とは反対の方向)に駆動量Δ2だけ駆動し、S406へと進む。なお、駆動量Δ2は範囲R1の幅と等しい値である。
S406ではロックリング位置推定処理を行い、S407へと進む。
S408ではロックリング101をロック方向に駆動量Δ1だけ駆動し、S409へと進む。
S409は処理の終了である。
S502ではシフトレンズ駆動手段104によりシフトレンズ103を中心からL3より大きい変位量だけ駆動し、S503へと進む。なお、L3はロックリング101の位置を推定するための閾値であり、ロック状態におけるシフトレンズ103の可動範囲L2より十分大きい値となっている。
S505では、ロックリング101は位置P5よりもロック側でないと判断し、S506へと進む。
S506はシフトレンズ103を中心へと駆動し、S507へと進む。
S507は処理の終了である。
以上のフローにより、シフトレンズ103を駆動させ、その可動範囲からロックリング101の位置を推定することができる。
図6(a)は初期化動作前のロックリング101の位置が範囲R1内であった場合の、初期化動作を示す図である。
初期化動作前のロックリング101の位置が範囲R2または範囲R4である場合、位置P5よりもロック側ではないため、S403の分岐でS405へと進む。そして、ロックリング101が位置P5よりもロック側となるまでS407の分岐でS405へと戻り、駆動量Δ2だけ駆動する。
図7はアンロック動作の動作フローを示すフローチャートである。
S702ではシフトレンズ103を中心へと駆動し、S703へと進む。
S703ではロックリング101をアンロック方向に駆動量Δ3だけ駆動し、S704へと進む。
S704は処理の終了である。
駆動量Δ3は、範囲R1に位置しているロックリング101を、駆動端E2に衝突させることなく範囲R2に収めるための駆動量であり、範囲R1の幅と範囲R3の幅と範囲R4の幅を加算した値である。
なお、通常動作におけるアンロック動作後に、像ぶれ補正装置10による像ぶれ補正を行うが、像ぶれ補正処理については本発明に直接の関係が無いため、説明を省略する。
そのため、以下説明するフローを用いてロック動作を行うことで、駆動端E1に衝突することなく範囲R1に駆動することができる。
S802ではシフトレンズ103を中心へと駆動し、S803へと進む。
S803ではロックリング101をロック方向に駆動量Δ4だけ駆動し、S406へと進む。
S406~S409は図4と同等の処理であり、説明を省略する。
駆動量Δ4は、ロックリング位置推定処理を行う位置まで駆動する駆動量であり、範囲R2の幅と範囲R4の幅を加算した値である。
図9(a)は通常時、すなわちロック動作中にステッピングモータの脱調が発生しなかった場合の、ロック動作を示す図である。
すなわち、脱調が発生して停止した位置からは初期化動作の図6(b)と同様の動作となり、駆動端E1に衝突することなく範囲R1に駆動することができる。
以上説明したとおり、初期化動作後の通常動作におけるアンロック動作、ロック動作においても、駆動端E1に衝突することなく範囲R1に駆動することができる。
なお、実施例1の図3と同等のものに関しては、同符号を符し説明を省略する。
S1110では、推定されたロックリング101が位置P6よりアンロック側かを判断し、アンロック側である場合はS1111へ、アンロック側でない場合はS1112へと進む。
S1112では、ロックリング101の推定位置Pn(第2駆動量)を元に駆動量Δn(第3駆動量)を算出した後、S1113へと進む。なお、推定位置Pn及び駆動量Δnの算出方法については後述する。
S1106は、S1102と同様、S402とは異なるロックリング位置推定処理を行い、S407へと進む。
図12は実施例2におけるロックリング位置推定処理を示すフローチャートである。なお、実施例1における図5と同様の処理については同符号を符し、説明を省略する。
S1209では、ロックリング101は位置P6よりもアンロック側だと判断し、S506へと進む。
S1210では、シフトレンズ103の駆動量からロックリング101の推定位置Pnを算出し、S506へと進む。
推定位置Pnからロック側の駆動端E1までの駆動量を(E1-Pn)として、初期化動作後の目標位置が範囲R1の中心であることと、S408で駆動量Δ1だけ駆動することを考慮すると、S1113での駆動量Δnは以下の式1で表わされる。
Δn = (E1-Pn)-(R1×1/2)-Δ1 (式1)
すなわち、初期化動作前の推定位置Pnから、駆動量Δnだけ駆動すると、範囲R1の中心から駆動量Δ1だけアンロック側の位置に駆動する。
初期化動作前の位置が範囲R1内であった場合、実施例1の図6(a)で示す動作と同様となるため、詳細説明を省略する。
以上により、初期化動作前のロックリング101が位置P5と位置P6の間であった場合について、正しく初期化動作を行うことができる。
この位置が図14(b)に示すように範囲R3の内側に位置している場合は、S407からS408へと進み、駆動端E1に衝突することなく範囲R1内に移動することができる。
以上により、初期化動作前のロックリング101が位置P6よりもアンロック側であった場合についても正しく初期化動作を行うことができる。
初期化動作前のロックリング101の位置が範囲R3の内側であった場合、位置P5よりロック側であるため、図11においてS403からS404へと進む。
以上により、初期化動作前のロックリング101の位置が範囲R3の内側であった場合についても正しく初期化動作を行うことができる。
102 ・・・・ ロックリング駆動手段(第1駆動部)
103 ・・・・ シフトレンズ(第2可動部材)
104 ・・・・ シフトレンズ駆動手段(第2駆動部)
105 ・・・・ シフトレンズ位置検出手段(位置検出手段)
108 ・・・・ 制御手段
Claims (9)
- 可動範囲を有するロック部材と、
前記ロック部材を駆動する第1駆動部と、
像ブレ補正用素子を保持する可動部材と、
前記可動部材を駆動する第2駆動部と、
前記可動部材の位置を検出する検出部と、
制御部とを有し、
前記可動部材は、前記可動範囲における一方の端から第1の位置までの第1の範囲において前記ロック部材により移動が制限され、
前記制御部は、
前記第1の範囲に対応する前記ロック部材の駆動量をΔ2、前記第1の位置から前記第1の範囲外の第2の位置までの前記駆動量Δ2より小さい前記ロック部材の駆動量をΔ1として、所定位置からの前記可動部材の駆動量が前記第2の位置に対応する閾値を超える指令により前記可動部材を駆動させた場合に前記可動部材の駆動量が前記閾値を超えた場合は、前記可動部材の駆動量が前記閾値を超えなくなるまで前記可動部材の可動範囲が小さくなる第1方向に前記駆動量Δ2ずつ前記ロック部材を駆動させた後に、前記第1方向に前記駆動量Δ1だけ前記ロック部材を駆動させることにより、前記第1の範囲内に前記ロック部材を駆動させ、
前記指令により前記可動部材を駆動させた場合に前記可動部材の駆動量が前記閾値を超えなかった場合は、前記第1方向とは反対の第2方向に前記駆動量Δ1だけ前記ロック部材を駆動させた後、前記指令により前記可動部材を駆動させた場合に前記可動部材の駆動量が前記閾値を超えなかった場合に、前記第1方向に前記駆動量Δ1だけ前記ロック部材を駆動させることにより、前記第1の範囲内に前記ロック部材を駆動させる制御を行うことを特徴とする駆動装置。 - 可動範囲を有するロック部材と、
前記ロック部材を駆動する第1駆動部と、
像ブレ補正用素子を保持する可動部材と、
前記可動部材を駆動する第2駆動部と、
前記可動部材の位置を検出する検出部と、
制御部とを有し、
前記可動部材は、前記可動範囲における一方の端から第1の位置までの第1の範囲において前記ロック部材により移動が制限され、
前記制御部は、
前記第1の範囲に対応する前記ロック部材の駆動量をΔ2、前記第1の位置から前記第1の範囲外の第2の位置までの前記駆動量Δ2より小さい前記ロック部材の駆動量をΔ1として、所定位置からの前記可動部材の駆動量が前記第2の位置に対応する第1の閾値を超える指令により前記可動部材を駆動させた場合に前記可動部材の駆動量が前記第1の閾値を超えた場合は、前記第1の閾値を超えた該駆動量に基づいて、前記指令により前記可動部材を再度駆動させた場合の前記可動部材の駆動量が前記第1の閾値と前記第1の位置に対応する第2の閾値との間の駆動量になるようにするための前記可動部材の可動範囲が小さくなる第1方向における前記ロック部材の駆動量を推定し、推定された該駆動量だけ前記ロック部材を駆動させ、前記指令により前記可動部材を駆動した場合に前記可動部材の駆動量が前記第1の閾値を超えなかった場合、前記第1方向に前記駆動量Δ1だけ前記ロック部材を駆動させることにより、前記第1の範囲内に前記ロック部材を駆動させる制御を行うことを特徴とする駆動装置。 - 前記第1の閾値を超えた前記可動部材の駆動量と前記ロック部材の駆動量との間の関係を記憶している記憶部を有し、前記制御部は、前記関係に基づいて、前記ロック部材の駆動量を推定することを特徴とする請求項2に記載の駆動装置。
- 前記像ブレ補正用素子と、
請求項1乃至3のいずれか1項に記載の駆動装置とを含むことを特徴とする光学装置。 - 前記像ブレ補正用素子は、レンズを含み、
前記第1駆動部は、ステッピングモータを含むことを特徴とする請求項4に記載の光学装置。 - 前記第2駆動部が前記可動部材を駆動する方向は、前記レンズの光軸に直交する成分を有し、
前記ロック部材は、前記光軸の周りにおいて前記可動部材を囲み、
前記第1駆動部は、前記ロック部材に前記光軸を軸とした回転をさせることを特徴とする請求項5に記載の光学装置。 - 前記第1駆動部は、前記ロック部材に前記回転をさせて、前記可動部材の移動を前記ロック部材が制限する状態とする請求項6に記載の光学装置。
- 請求項4乃至7のいずれか1項に記載の光学装置と、
前記光学装置により形成された像を受ける撮像素子とを有することを特徴とする撮像装置。 - 前記光学装置は、前記第2駆動部が前記可動部材を駆動することにより前記像のぶれを低減させることを特徴とする請求項8に記載の撮像装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017214438A JP7071092B2 (ja) | 2017-11-07 | 2017-11-07 | 駆動装置、光学装置および撮像装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017214438A JP7071092B2 (ja) | 2017-11-07 | 2017-11-07 | 駆動装置、光学装置および撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019086647A JP2019086647A (ja) | 2019-06-06 |
| JP2019086647A5 JP2019086647A5 (ja) | 2020-12-17 |
| JP7071092B2 true JP7071092B2 (ja) | 2022-05-18 |
Family
ID=66762963
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017214438A Expired - Fee Related JP7071092B2 (ja) | 2017-11-07 | 2017-11-07 | 駆動装置、光学装置および撮像装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7071092B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115542645A (zh) * | 2022-09-30 | 2022-12-30 | 苏州佳世达光电有限公司 | 交换式镜头自适应控制补偿系统与方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005215564A (ja) | 2004-01-30 | 2005-08-11 | Canon Inc | 位置制御装置、像振れ補正装置及び光学機器 |
| JP2009116033A (ja) | 2007-11-06 | 2009-05-28 | Nikon Corp | ブレ補正装置および光学機器 |
| US20160070152A1 (en) | 2014-09-05 | 2016-03-10 | Samsung Electronics Co., Ltd. | Optical Image Stabilizing Apparatus and Photographing Apparatus Having the Same |
| JP2016042145A (ja) | 2014-08-18 | 2016-03-31 | リコーイメージング株式会社 | 像振れ補正装置および光学機器 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10293335A (ja) * | 1997-04-17 | 1998-11-04 | Canon Inc | 位置制御装置及び補正光学装置 |
-
2017
- 2017-11-07 JP JP2017214438A patent/JP7071092B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005215564A (ja) | 2004-01-30 | 2005-08-11 | Canon Inc | 位置制御装置、像振れ補正装置及び光学機器 |
| JP2009116033A (ja) | 2007-11-06 | 2009-05-28 | Nikon Corp | ブレ補正装置および光学機器 |
| JP2016042145A (ja) | 2014-08-18 | 2016-03-31 | リコーイメージング株式会社 | 像振れ補正装置および光学機器 |
| US20160070152A1 (en) | 2014-09-05 | 2016-03-10 | Samsung Electronics Co., Ltd. | Optical Image Stabilizing Apparatus and Photographing Apparatus Having the Same |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019086647A (ja) | 2019-06-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JPH05100280A (ja) | 防振カメラ | |
| JP7021048B2 (ja) | モータ制御装置及びモータ制御装置の制御方法 | |
| JP7071092B2 (ja) | 駆動装置、光学装置および撮像装置 | |
| US7149419B2 (en) | Position control device, image blur correction device, and optical apparatus | |
| JPWO2018221723A1 (ja) | レンズ鏡筒及び撮像装置 | |
| US9024567B2 (en) | Driving apparatus, camera platform apparatus and lens apparatus including the driving apparatus, and driving method of controlling the driving apparatus | |
| US8503115B2 (en) | Lens drive control device and image pickup device | |
| JP2022010910A (ja) | 制御システム、及び制御方法 | |
| JP4423721B2 (ja) | 像ブレ防止装置 | |
| JP4649938B2 (ja) | ブレ補正装置、レンズ鏡筒、カメラシステム | |
| JP6700801B2 (ja) | レンズ鏡筒、及び撮像装置 | |
| US12583502B2 (en) | Steering column adjusting device and steering column adjusting method | |
| US20240126044A1 (en) | Control apparatus, rotationally driving apparatus, control method, and storage medium | |
| JP2020134794A (ja) | レンズ装置 | |
| JP2010128814A (ja) | 制御装置 | |
| JP4529425B2 (ja) | ブレ補正装置 | |
| JP2020144257A (ja) | 観察光学系 | |
| KR102423705B1 (ko) | 사이드 미러의 방향각 메모리 장치 | |
| JP7661102B2 (ja) | 振れ補正装置及びそれを有するレンズ鏡筒 | |
| JP2015197660A (ja) | 光学機器およびその制御方法 | |
| JP7399702B2 (ja) | レーザ加工装置 | |
| JP2022148164A (ja) | レンズ装置、撮像装置、レンズ装置の制御方法、及びプログラム | |
| JP5159287B2 (ja) | 像振れ補正装置、撮像装置および像振れ補正装置の制御方法 | |
| JP2011139196A (ja) | カメラ装置および脱調検出方法 | |
| JP2018132694A (ja) | 像ブレ補正装置及びこれを備えたレンズ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20171214 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20180126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201105 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201105 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210831 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211005 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220323 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220405 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220506 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7071092 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |