JP7140577B2 - 交差道路推定装置 - Google Patents
交差道路推定装置 Download PDFInfo
- Publication number
- JP7140577B2 JP7140577B2 JP2018132373A JP2018132373A JP7140577B2 JP 7140577 B2 JP7140577 B2 JP 7140577B2 JP 2018132373 A JP2018132373 A JP 2018132373A JP 2018132373 A JP2018132373 A JP 2018132373A JP 7140577 B2 JP7140577 B2 JP 7140577B2
- Authority
- JP
- Japan
- Prior art keywords
- road
- vehicle
- intersecting
- edge
- stationary
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Traffic Control Systems (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
[1.構成]
図1に示す車載の交差道路推定システム2は、センサ群10と、交差道路推定装置20と、スピーカ40と、ディスプレイ42とを備えている。センサ群10は、ミリ波レーダ12とカメラ14と車速センサ16とを備えている。
交差道路推定装置20が実行する交差道路220の道路端推定処理を図2に示すフローチャートに基づいて説明する。
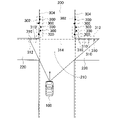
静止物体316を交差道路220の道路端を表す外側静止物体310の候補から除外するときの判定に使用する上記の所定距離は、交差道路220の道路端314を表す外側静止物体310の候補とするには、静止物体群302の自車両100側の始点である静止物体300aから自車両100側に離れ過ぎていると判断できる距離である。
S414において報知部34は、物体推定部32が推定する交差道路220を移動する移動物体110の位置と方向とに基づき、交差道路220を移動している移動物体110が自車両に接近している場合、スピーカ40またはディスプレイ42により、移動物体が自車両に接近していることを自車両100の搭乗者に報知する。
以上説明した本実施形態によると、以下の効果を得ることができる。
(1)自車両100が走行する走行道路200の道路端304よりも外側に存在する外側静止物体310を交差道路220の道路端314の候補として抽出する。これにより、走行道路200の道路端304を表す静止物体と、交差道路220の道路端314を表す静止物体とが混在している検出結果から、走行道路200の道路端304を表す静止物体と、交差道路220の道路端314を表す静止物体とを区別することができる。したがって、抽出した外側静止物体310の位置に基づいて、交差道路220の道路端314を推定できる。
また、S400、S402が物体検出部の処理に対応し、S404物体抽出部の処理に対応し、S406が第1の推定部の処理に対応し、S408が候補抽出部の処理に対応し、S410が第2の推定部の処理に対応し、S412が物体推定部の処理に対応し、414が報知部の処理に対応する。
以上、本開示の実施形態について説明したが、本開示は上述の実施形態に限定されることなく、種々変形して実施することができる。
Claims (12)
- 車載の交差道路推定装置(20)であって、
自車両(100)の周囲に存在する物体(110、300、310、316)と前記物体の位置とを検出するように構成された物体検出部(22、S400)と、
前記物体検出部による前記物体の検出結果から、静止物体(300、310、316)と前記静止物体の位置とを抽出するように構成された物体抽出部(24、S404)と、
前記物体抽出部が抽出する前記静止物体のうち、前記自車両の進行方向に沿って連続した道路端を表すと考えられる所定範囲内の静止物体の位置に基づいて、前記自車両が走行する走行道路(200)の道路端(304)を推定するように構成された第1の推定部(26、S406)と、
前記第1の推定部が推定する前記走行道路の道路端よりも外側に存在する静止物体(310)を、前記走行道路と交差する交差道路(220)の道路端(314)を表す外側静止物体の候補として抽出するように構成された候補抽出部(28、S408)と、
前記候補抽出部が抽出する前記外側静止物体の位置に基づいて前記交差道路の道路端を推定するように構成された第2の推定部(30、S410)と、
を備える交差道路推定装置。 - 請求項1に記載の交差道路推定装置であって、
前記第2の推定部は、前記外側静止物体の少なくとも2点の位置を直線で近似して前記交差道路の道路端を推定するように構成されている、
交差道路推定装置。 - 請求項1または2に記載の交差道路推定装置であって、
前記第1の推定部は、これまでの前記走行道路の道路端の推定結果に基づき、交差点よりも前記自車両の進行方向奥側の前記走行道路の道路端を推定するように構成されている、
交差道路推定装置。 - 請求項1から3のいずれか1項に記載の交差道路推定装置であって、
前記第2の推定部は、前記交差道路の道路端を推定する処理サイクル毎に前記交差道路の道路端の位置と方向とを記憶しておき、今回の処理サイクルで推定する前記交差道路の道路端の位置と方向、ならびにこれまでの処理サイクルで記憶した前記交差道路の道路端の位置と方向に基づいて、今回の処理サイクルで推定する前記交差道路の道路端の位置と方向とを決定するように構成されている、
交差道路推定装置。 - 請求項1から4のいずれか1項に記載の交差道路推定装置であって、
前記第1の推定部は、前記走行道路の道路端を表す前記静止物体のうち互いの距離が所定範囲内の位置の前記静止物体を静止物体群(302)とし、
前記候補抽出部は、前記走行道路の道路端よりも外側に存在する前記静止物体(310、316)のうち、前記静止物体群において前記自車両側の始点となる前記静止物体(300a)の位置よりも所定距離以上、前記自車両側に位置する前記静止物体(316)を、前記外側静止物体の候補から除外するように構成されている、
交差道路推定装置。 - 請求項1から5のいずれか1項に記載の交差道路推定装置であって、
前記物体検出部(S402)は、前記自車両に対する前記物体の相対速度を検出するように構成されており、
前記物体抽出部は、前記物体検出部が検出する前記物体の前記相対速度と前記自車両の車速とに基づいて、前記静止物体を検出するように構成されている、
交差道路推定装置。 - 請求項1から6のいずれか1項に記載の交差道路推定装置であって、
前記物体抽出部は、前記物体の位置の変化に基づいて前記静止物体を検出するように構成されている、
交差道路推定装置。 - 請求項1から7のいずれか1項に記載の交差道路推定装置であって、
前記第1の推定部は、前記自車両が走行している場合、前記走行道路の道路端を推定するように構成されている、
交差道路推定装置。 - 請求項1から8のいずれか1項に記載の交差道路推定装置であって、
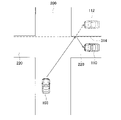
前記物体検出部による前記物体の検出結果から、移動物体(110)と前記移動物体の位置とを抽出し、前記移動物体の位置と前記交差道路の道路端の位置と方向とに基づいて、前記交差道路を移動する前記移動物体の位置と移動方向とを推定するように構成された物体推定部(32、S412)をさらに備える、
交差道路推定装置。 - 請求項9に記載の交差道路推定装置であって、
前記物体推定部は、前記移動物体の移動方向を前記交差道路の道路端に沿った方向と推定するように構成されている、
交差道路推定装置。 - 請求項9または10に記載の交差道路推定装置であって、
前記物体検出部は、探査波と反射波とにより前記物体の位置を検出するように構成されており、
前記物体推定部は、前記移動物体の位置が前記交差道路の道路端よりも前記自車両に対して奥側の場合、前記交差道路の道路端よりも前記自車両に対して奥側の前記移動物体は前記交差道路の道路端を対称の軸として反対側の位置に存在するものとして前記物体の位置を修正するように構成されている、
交差道路推定装置。 - 請求項9から11のいずれか1項に記載の交差道路推定装置であって、
前記物体推定部が推定する前記移動物体の位置と移動方向とに基づいて、前記移動物体が前記自車両に接近していると判断すると、前記自車両の搭乗者に前記移動物体の接近を報知装置(40、42)により報知するように構成されている報知部(34、S414)をさらに備える、
交差道路推定装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018132373A JP7140577B2 (ja) | 2018-07-12 | 2018-07-12 | 交差道路推定装置 |
| PCT/JP2019/026499 WO2020013057A1 (ja) | 2018-07-12 | 2019-07-03 | 交差道路推定装置 |
| US17/144,874 US11983937B2 (en) | 2018-07-12 | 2021-01-08 | Intersecting road estimation device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018132373A JP7140577B2 (ja) | 2018-07-12 | 2018-07-12 | 交差道路推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020009366A JP2020009366A (ja) | 2020-01-16 |
| JP7140577B2 true JP7140577B2 (ja) | 2022-09-21 |
Family
ID=69142584
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018132373A Active JP7140577B2 (ja) | 2018-07-12 | 2018-07-12 | 交差道路推定装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11983937B2 (ja) |
| JP (1) | JP7140577B2 (ja) |
| WO (1) | WO2020013057A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11892311B2 (en) | 2016-11-26 | 2024-02-06 | Thinkware Corporation | Image processing apparatus, image processing method, computer program and computer readable recording medium |
| JP2025097571A (ja) * | 2023-12-19 | 2025-07-01 | トヨタ自動車株式会社 | 交差道路検出装置、交差道路検出方法及びプログラム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013036978A (ja) | 2011-07-12 | 2013-02-21 | Denso Corp | 物標検出装置,壁判定方法 |
| JP2014115904A (ja) | 2012-12-11 | 2014-06-26 | Toyota Central R&D Labs Inc | 交差点道路境界検出装置及びプログラム |
| JP2015001773A (ja) | 2013-06-13 | 2015-01-05 | ボッシュ株式会社 | 車線推定装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4100269B2 (ja) | 2003-06-17 | 2008-06-11 | 日産自動車株式会社 | 車両用道路形状認識装置 |
| JP4561507B2 (ja) | 2005-07-08 | 2010-10-13 | 株式会社デンソー | 道路形状認識装置 |
| JP4878870B2 (ja) | 2006-02-27 | 2012-02-15 | トヨタ自動車株式会社 | 道路形状推定装置、障害物検出装置および道路形状推定方法 |
| JP2012103970A (ja) | 2010-11-11 | 2012-05-31 | Toyota Motor Corp | 道路形状推定装置 |
| JP5594102B2 (ja) | 2010-12-02 | 2014-09-24 | トヨタ自動車株式会社 | 道路形状推定装置 |
| JP5321640B2 (ja) | 2011-05-17 | 2013-10-23 | 株式会社デンソー | 車両用道路形状認識方法及び装置、記録媒体 |
| JP5682757B2 (ja) | 2011-04-28 | 2015-03-11 | トヨタ自動車株式会社 | 道路形状推定装置 |
| WO2016147623A1 (ja) * | 2015-03-18 | 2016-09-22 | 日本電気株式会社 | 運転制御装置、運転制御方法および車車間通信システム |
| JP6169221B1 (ja) | 2016-05-25 | 2017-07-26 | 三菱電機株式会社 | レーダ装置および路側雪壁検出方法 |
| US11200433B2 (en) * | 2017-05-03 | 2021-12-14 | Mobileye Vision Technologies Ltd. | Detection and classification systems and methods for autonomous vehicle navigation |
-
2018
- 2018-07-12 JP JP2018132373A patent/JP7140577B2/ja active Active
-
2019
- 2019-07-03 WO PCT/JP2019/026499 patent/WO2020013057A1/ja not_active Ceased
-
2021
- 2021-01-08 US US17/144,874 patent/US11983937B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013036978A (ja) | 2011-07-12 | 2013-02-21 | Denso Corp | 物標検出装置,壁判定方法 |
| JP2014115904A (ja) | 2012-12-11 | 2014-06-26 | Toyota Central R&D Labs Inc | 交差点道路境界検出装置及びプログラム |
| JP2015001773A (ja) | 2013-06-13 | 2015-01-05 | ボッシュ株式会社 | 車線推定装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210133465A1 (en) | 2021-05-06 |
| US11983937B2 (en) | 2024-05-14 |
| WO2020013057A1 (ja) | 2020-01-16 |
| JP2020009366A (ja) | 2020-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111712731B (zh) | 目标检测方法、系统及可移动平台 | |
| CN107728146B (zh) | 雷达设置角度计算装置、雷达装置及雷达设置角度计算方法 | |
| JP5407898B2 (ja) | 対象物検出装置及びプログラム | |
| JP3918791B2 (ja) | 物体検出装置 | |
| JP6747269B2 (ja) | 物体認識装置 | |
| US7889116B2 (en) | Object detecting apparatus | |
| US10585188B2 (en) | Broadside detection system and techniques for use in a vehicular radar | |
| JP6450294B2 (ja) | 物体検出装置、物体検出方法、及びプログラム | |
| CN109155109A (zh) | 物标检测装置 | |
| JP7111586B2 (ja) | 物体検出装置 | |
| JP2001256600A (ja) | 車両用道路形状認識方法及び装置、記録媒体 | |
| CN108535727B (zh) | 跟踪主车辆附近的多个对象的方法 | |
| CN107408346B (zh) | 车辆控制装置以及车辆控制方法 | |
| JP6958079B2 (ja) | 物標判定装置 | |
| JP2008304344A (ja) | 物標検出装置 | |
| JP7165630B2 (ja) | 認識システム、車両制御システム、認識方法、およびプログラム | |
| JP2019012314A (ja) | 衝突推定装置および衝突推定方法 | |
| JP2019096132A (ja) | 物体認識装置 | |
| JP2023057674A (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| JP7140577B2 (ja) | 交差道路推定装置 | |
| US11841419B2 (en) | Stationary and moving object recognition apparatus | |
| JPWO2017216856A1 (ja) | 車間距離推定方法及び車間距離推定装置 | |
| JP2018018215A (ja) | 物体特徴点検知装置 | |
| CN114556141A (zh) | 物体跟踪装置 | |
| JP2019215177A (ja) | 軌道設定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210105 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220323 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220816 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220908 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7140577 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |