JP7143780B2 - 測距装置および測距方法 - Google Patents
測距装置および測距方法 Download PDFInfo
- Publication number
- JP7143780B2 JP7143780B2 JP2019027168A JP2019027168A JP7143780B2 JP 7143780 B2 JP7143780 B2 JP 7143780B2 JP 2019027168 A JP2019027168 A JP 2019027168A JP 2019027168 A JP2019027168 A JP 2019027168A JP 7143780 B2 JP7143780 B2 JP 7143780B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- light
- signal
- time
- mirror
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/4912—Receivers
- G01S7/4915—Time delay measurement, e.g. operational details for pixel components; Phase measurement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/02—Details
- G01C3/06—Use of electric means to obtain final indication
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/32—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Measurement Of Optical Distance (AREA)
Description
前記第3ステップで前記光偏向器から出射された出射光が前記物体および前記光偏向器からみて前記物体側に配置されたミラーでそれぞれ反射した第1反射光および第2反射光をフォトディテクタで検出する第4ステップと、前記第1反射光および前記第2反射光を検出するフォトディテクタからのアナログ信号と前記光偏向器の偏向角度を示すアナログ信号とをアナログ-ディジタル変換器でディジタル信号に変換する第5ステップと、前記第2ステップで前記光スプリッタから前記光が出力されてから前記第1反射光が前記フォトディテクタで検出されるまでの時間に基づいて、前記物体までの距離を示す第1距離信号を出力する第6ステップと、前記第2ステップで前記光スプリッタから前記光が出力されてから前記第2反射光が前記フォトディテクタで検出されるまでの時間に基づいて、前記ミラーまでの距離を示す第2距離信号を出力する第7ステップと、前記第1距離信号を前記第2距離信号に基づいて、前記アナログ-ディジタル変換器のチャネル間のタイミング差の時間変動に起因する誤差に関して補正して、前記物体までの距離を示す第3距離信号を出力する第8ステップとを備える。また、前記ミラーからの反射光が受光される時間範囲が、前記光源の変調の周期より長くてもよい。
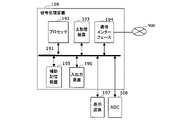
次に、上述した機能を有する信号処理装置109のハードウェア構成の一例について図3を参照して説明する。
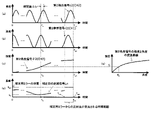
次に、本実施の形態に係る測距装置1の動作について、図4のフローチャートを参照して説明する。
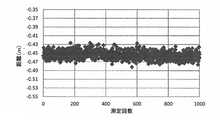
図5および図6は、補正前の物体104までの距離を示しており、図7および図8は、補正後の物体104までの距離を示している。また、図5および図7は、1000回測定を繰り返した場合の各回の物体104までの距離の測定値のプロットである。図6および図8は、距離の測定値をヒストグラムで示している。
Claims (10)
- 周期的に強度変調された光を出力する光源と、
前記光源の光を2つに分岐する光スプリッタと、 前記光スプリッタの一方から出力された前記光を偏向して測定対象の物体に向けて出射する光偏向器と、
前記光偏向器からみて前記物体側に配置されたミラーと、
前記光偏向器から出射された出射光が前記物体および前記ミラーでそれぞれ反射した第1反射光および第2反射光を検出するフォトディテクタと
を有する光学系と、
前記第1反射光および前記第2反射光を検出するフォトディテクタからのアナログ信号と、前記光偏向器の偏向角度を示すアナログ信号とをディジタル信号に変換するアナログ-ディジタル変換器と、
前記光スプリッタから前記光が出力されてから前記第1反射光が前記フォトディテクタで検出されるまでの時間に基づいて、前記物体までの距離を示す第1距離信号を出力する第1測距部と、
前記光スプリッタから前記光が出力されてから前記第2反射光が前記フォトディテクタで検出されるまでの時間に基づいて、前記ミラーまでの距離を示す第2距離信号を出力する第2測距部と、
前記第1距離信号を前記第2距離信号に基づいて、前記アナログ-ディジタル変換器のチャネル間のタイミング差の時間変動に起因する誤差に関して補正して、前記物体までの距離を示す第3距離信号を出力する距離補正部と
を有する信号処理装置と
を備える測距装置。 - 請求項1に記載の測距装置において、
前記ミラーからの反射光が受光される時間範囲が、前記光源の変調の周期より長いことを特徴とする測距装置。 - 請求項1または請求項2に記載の測距装置において、
前記ミラーは、前記光偏向器と前記物体とを結んだ線上とは異なる位置に配置されることを特徴とする測距装置。 - 請求項1から請求項3のいずれか1項に記載の測距装置において、
前記距離補正部は、前記第1距離信号から前記第2距離信号を引いた値を含む情報を、前記物体までの距離を示す前記第3距離信号として出力することを特徴とする測距装置。 - 請求項1から請求項4のいずれか1項に記載の測距装置において、
前記第1測距部は、求めた前記第1距離信号の各々に対応する時刻情報を取得し、
前記信号処理装置は、
前記第1測距部によって取得された前記時刻情報を前記光偏向器による偏向角度の情報に変換し、偏向角度と距離とが対応付けられた角度-距離信号を出力する時間-角度変換部を備える
ことを特徴とする測距装置。 - 請求項1から請求項5のいずれか1項に記載の測距装置において、
前記第1測距部は、前記光源の光強度のピーク時刻で、前記物体までの距離を示す前記第1距離信号を離散的に取得することを特徴とする測距装置。 - 請求項6に記載の測距装置において、
前記信号処理装置は、
前記第1測距部が取得した、離散的な前記物体までの距離を示す前記第1距離信号に基づいて、前記第3距離信号の補間を行う補間部を備えることを特徴とする測距装置。 - 請求項1から請求項7のいずれか1項に記載の測距装置において、
前記光源は、波長が時間と共に変化する波長掃引光源であり、
前記光偏向器は、回折格子またはプリズムを含む
ことを特徴とする測距装置。 - 周期的に強度変調された光を光源から出力する第1ステップと、
前記光源の光を光スプリッタによって2つに分岐する第2ステップと、
前記第2ステップで前記光スプリッタの一方から出力された前記光を光偏向器によって偏向して測定対象の物体に向けて出射する第3ステップと、
前記第3ステップで前記光偏向器から出射された出射光が前記物体および前記光偏向器からみて前記物体側に配置されたミラーでそれぞれ反射した第1反射光および第2反射光をフォトディテクタで検出する第4ステップと、
前記第1反射光および前記第2反射光を検出するフォトディテクタからのアナログ信号と前記光偏向器の偏向角度を示すアナログ信号とをアナログ-ディジタル変換器でディジタル信号に変換する第5ステップと、
前記第2ステップで前記光スプリッタから前記光が出力されてから前記第1反射光が前記フォトディテクタで検出されるまでの時間に基づいて、前記物体までの距離を示す第1距離信号を出力する第6ステップと、
前記第2ステップで前記光スプリッタから前記光が出力されてから前記第2反射光が前記フォトディテクタで検出されるまでの時間に基づいて、前記ミラーまでの距離を示す第2距離信号を出力する第7ステップと、
前記第1距離信号を前記第2距離信号に基づいて、前記アナログ-ディジタル変換器のチャネル間のタイミング差の時間変動に起因する誤差に関して補正して、前記物体までの距離を示す第3距離信号を出力する第8ステップと
を備える測距方法。 - 請求項9に記載の測距方法において、
前記ミラーからの反射光が受光される時間範囲が、前記光源の変調の周期より長いことを特徴とする測距方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019027168A JP7143780B2 (ja) | 2019-02-19 | 2019-02-19 | 測距装置および測距方法 |
| US17/420,410 US20220082675A1 (en) | 2019-02-19 | 2020-02-04 | Rangefinder and Rangefinding Method |
| PCT/JP2020/004041 WO2020170796A1 (ja) | 2019-02-19 | 2020-02-04 | 測距装置および測距方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019027168A JP7143780B2 (ja) | 2019-02-19 | 2019-02-19 | 測距装置および測距方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020134285A JP2020134285A (ja) | 2020-08-31 |
| JP7143780B2 true JP7143780B2 (ja) | 2022-09-29 |
Family
ID=72144640
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019027168A Active JP7143780B2 (ja) | 2019-02-19 | 2019-02-19 | 測距装置および測距方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20220082675A1 (ja) |
| JP (1) | JP7143780B2 (ja) |
| WO (1) | WO2020170796A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7344732B2 (ja) * | 2019-09-25 | 2023-09-14 | 株式会社トプコン | 測量装置及び測量装置システム |
| US20240036200A1 (en) * | 2022-08-01 | 2024-02-01 | Imec Vzw | Method and a device for determining a distance to a target |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015152485A (ja) | 2014-02-17 | 2015-08-24 | 株式会社デンソー | 距離測定装置 |
| JP2015175629A (ja) | 2014-03-13 | 2015-10-05 | 株式会社日立ハイテクノロジーズ | 距離測定装置及び距離測定システム |
| JP2016170053A (ja) | 2015-03-13 | 2016-09-23 | オムロンオートモーティブエレクトロニクス株式会社 | レーザレーダ装置 |
| US20180040119A1 (en) | 2016-08-03 | 2018-02-08 | Sightline Innovation Inc. | System and method for integrated laser scanning and signal processing |
| JP2018059789A (ja) | 2016-10-05 | 2018-04-12 | 国立大学法人東京農工大学 | 距離測定装置及び距離測定方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3155331B2 (ja) * | 1992-04-21 | 2001-04-09 | オリンパス光学工業株式会社 | 距離測定装置 |
-
2019
- 2019-02-19 JP JP2019027168A patent/JP7143780B2/ja active Active
-
2020
- 2020-02-04 US US17/420,410 patent/US20220082675A1/en not_active Abandoned
- 2020-02-04 WO PCT/JP2020/004041 patent/WO2020170796A1/ja not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015152485A (ja) | 2014-02-17 | 2015-08-24 | 株式会社デンソー | 距離測定装置 |
| JP2015175629A (ja) | 2014-03-13 | 2015-10-05 | 株式会社日立ハイテクノロジーズ | 距離測定装置及び距離測定システム |
| JP2016170053A (ja) | 2015-03-13 | 2016-09-23 | オムロンオートモーティブエレクトロニクス株式会社 | レーザレーダ装置 |
| US20180040119A1 (en) | 2016-08-03 | 2018-02-08 | Sightline Innovation Inc. | System and method for integrated laser scanning and signal processing |
| JP2018059789A (ja) | 2016-10-05 | 2018-04-12 | 国立大学法人東京農工大学 | 距離測定装置及び距離測定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020134285A (ja) | 2020-08-31 |
| US20220082675A1 (en) | 2022-03-17 |
| WO2020170796A1 (ja) | 2020-08-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115023628B (zh) | 用于调频连续波LiDAR的芯片上监控和校准电路 | |
| US10330780B2 (en) | LIDAR based 3-D imaging with structured light and integrated illumination and detection | |
| JP6303026B2 (ja) | 計測方法および装置 | |
| US20110161031A1 (en) | Time Delay Estimation | |
| JP2019056567A (ja) | 距離計測装置 | |
| US20210325210A1 (en) | Optical fiber characteristics measurement apparatus and optical fiber characteristics measurement method | |
| US20240004044A1 (en) | Apparatus and method for measuring distant to and/or velocity of physical object | |
| CN109946707B (zh) | 激光雷达接收装置、发射装置、系统及距离的测量方法 | |
| US11921216B2 (en) | Electronic apparatus and method for controlling thereof | |
| JP2015094760A5 (ja) | ||
| JP7143780B2 (ja) | 測距装置および測距方法 | |
| CN107102338A (zh) | 调频连续波激光测距中激光器跳模影响的抑制方法 | |
| JP7201088B2 (ja) | 測距装置 | |
| JP7115375B2 (ja) | 測距装置および測距方法 | |
| US20210026017A1 (en) | Apparatus for ascertaining a distance to an object | |
| JP2017044565A (ja) | 距離測定装置及びその方法 | |
| CN116981961A (zh) | 计测对象物的距离以及/或者速度的装置及方法 | |
| US9124060B1 (en) | System and method for generating and utilizing a valid sweep vector to obviate spurious data and increase sweep rate in an akinetic path-based swept laser | |
| US9385501B1 (en) | System and method for generating and utilizing a valid sweep signal to obviate spurious data and increase sweep rate in an akinetic path-based swept laser | |
| US9153939B1 (en) | System and method for generating and utilizing sample trigger blanking to obviate spurious data and increase sweep rate in an akinetic path-based swept laser | |
| CN116755099A (zh) | 测速测距系统及方法 | |
| WO2026038383A1 (ja) | 光干渉距離測定装置 | |
| WO2026058460A1 (ja) | 光干渉距離測定装置、光干渉距離測定方法、及び光干渉距離測定プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210531 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220524 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220613 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220816 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220829 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7143780 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |