JP7145845B2 - コンピュータ支援遠隔操作手術システム及び方法 - Google Patents
コンピュータ支援遠隔操作手術システム及び方法 Download PDFInfo
- Publication number
- JP7145845B2 JP7145845B2 JP2019510440A JP2019510440A JP7145845B2 JP 7145845 B2 JP7145845 B2 JP 7145845B2 JP 2019510440 A JP2019510440 A JP 2019510440A JP 2019510440 A JP2019510440 A JP 2019510440A JP 7145845 B2 JP7145845 B2 JP 7145845B2
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- instrument
- engagement
- end portion
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B90/11—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis with guides for needles or instruments, e.g. arcuate slides or ball joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/302—Surgical robots specifically adapted for manipulations within body cavities, e.g. within abdominal or thoracic cavities
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
- A61B2034/715—Cable tensioning mechanisms for removing slack
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/371—Surgical systems with images on a monitor during operation with simultaneous use of two cameras
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Robotics (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Manipulator (AREA)
- Surgical Instruments (AREA)
Description
この出願は、(2016年8月24日に出願された)米国特許仮出願第62/379,112号及び(2016年8月24日に出願された)米国特許仮出願第62/379,114号の優先権の利益を主張し、それらの両方を参照として本明細書に援用する。
CaliforniaのIntuitive Surgical, Inc.カリフォルニア州サニーベールのIntuitive Surgical、Inc.によって商品化されているda Vinci(登録商標)Surgical Systemである。発明的な態様は、コンピュータ支援遠隔操作手術システムと関連付けられている。知識のある人々は、本明細書に開示される発明的な態様が、コンピュータ支援実施形態及び実装並びに手動実施形態及び実装とコンピュータ支援実施形態及び実装との混成の組み合わせを含む、様々な方法で具現され且つ実施される場合があることを理解するだろう。適用可能な場合、発明的な態様は、比較的小さい手持ち式手動デバイス及び追加的な機械的支持体を有する比較的より大きいシステムの両方、並びにコンピュータ支援遠隔操作医療デバイスの他の実施形態において具現され且つ実施されてよい。加えて、発明的な態様は、遠隔操作動作というよりもむしろ自律的作用を含むコンピュータ支援手術システムにおける進歩と関連付けられるので、たとえ記述が遠隔操作システムに集中するとしても、遠隔操作手術システム及び自律手術システムの両方が含まれる。
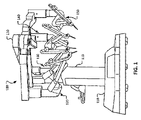
46,47が、立体視野ディスプレイ45内に設けられる。典型的には、適切なビューア又はディスプレイ上で手術部位の画像を見ながら、外科医は、マスタ制御入力デバイスを操作することによって患者に外科処置を実行し、次いで、マスタ制御入力デバイスは、ロボット器具の動きを制御する。
幾つかの実施形態において、器具ホルダフレーム124に沿う器具ホルダキャリッジ128の移動は、プロセッサ43によって作動可能/制御可能な電動並進移動である。
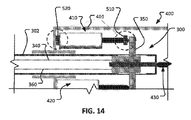
或いは、張力付与部材は、エンドエフェクタに連結されたプッシュロッドのような、圧縮部材と置換されることがあるので、アクチュエータ係合部材の遠位方向への移動は、対応する圧縮部材内の圧縮及び関連するエンドエフェクタの移動を引き起こす。
Claims (11)
- コンピュータ支援遠隔操作手術システムのための手術器具であって、
近位端部分と、
該近位端部分から延びる器具シャフトであって、前記近位端部分とは反対側の遠位端部分を含む、器具シャフトと、
前記遠位端部分に連結されるエンドエフェクタであって、エンドエフェクタが前記器具シャフトに対して移動可能である1つ又はそれよりも多くの自由度のうちの第1の自由度を有する、エンドエフェクタと、
前記近位端部分に移動可能に連結される第1のアクチュエータ係合部材と、
前記近位端部分に移動可能に連結される第2のアクチュエータ係合部材と、
前記近位端部分に連結される器具シャフトアクチュエータ係合部材であって、(i)拘束係合において器具駆動ユニットシャフトアクチュエータと係合するように構成され、或いは(ii)非拘束係合において器具駆動ユニットシャフトアクチュエータが器具シャフトアクチュエータ係合部材に向かう方向において器具駆動ユニットシャフトアクチュエータと係合するように構成される、器具シャフトアクチュエータ係合部材と、を含み、
前記第1のアクチュエータ係合部材は、前記第1のアクチュエータ係合部材の近位方向への移動が前記エンドエフェクタを前記第1の自由度において移動させ且つ前記第2のアクチュエータ係合部材を遠位方向に移動させるよう、前記エンドエフェクタを介して前記第2のアクチュエータ係合部材に連結され、
前記第1のアクチュエータ係合部材は、第1の非拘束係合において、第1の器具駆動ユニットアクチュエータが前記第1のアクチュエータ係合部材に向かう方向において前記第1の器具駆動ユニットアクチュエータと係合するように構成され、
前記第2のアクチュエータ係合部材は、第2の非拘束係合において、第2の器具駆動ユニットアクチュエータが前記第2のアクチュエータ係合部材に向かう方向において前記第2の器具駆動ユニットアクチュエータと係合するように構成され、
前記第1の非拘束係合において前記第1の器具駆動ユニットアクチュエータが前記第1のアクチュエータ係合部材に向かう前記方向は、前記第2の非拘束係合において前記第2の器具駆動ユニットアクチュエータが前記第2のアクチュエータ係合部材に向かう前記方向と同じであり、
前記非拘束係合において前記器具駆動ユニットシャフトアクチュエータが前記器具シャフトアクチュエータ係合部材に向かう前記方向は、前記第1の非拘束係合において前記第1の器具駆動ユニットアクチュエータが前記第1のアクチュエータ係合部材に向かう前記方向及び前記第2の非拘束係合において前記第2の器具駆動ユニットアクチュエータが前記第2のアクチュエータ係合部材に向かう前記方向と反対である、
手術器具。 - 前記器具シャフトアクチュエータ係合部材は、手動操作ラッチを含む、請求項1に記載の手術器具。
- 前記第1及び第2のアクチュエータ係合部材は、当該手術器具の前記近位端部分にある共通の長手方向場所に配置される、請求項1又は2に記載の手術器具。
- 当該手術器具の長手方向軸が、前記近位端部分及び前記遠位端部分を通じて延びるように定められ、
前記近位端部分は、前記長手方向軸から径方向に外向きに延びるハンドルを含む、
請求項1乃至3のうちのいずれか1項に記載の手術器具。 - 前記ハンドルは、前記器具シャフトアクチュエータ係合部材を含む、請求項4に記載の手術器具。
- 前記器具シャフトアクチュエータ係合部材は、手動操作ラッチを含む、請求項5に記載の手術器具。
- 前記第1及び第2のアクチュエータ係合部材は、それぞれ、前記近位端部分上で長手方向にスライドする、請求項1乃至6のうちのいずれか1項に記載の手術器具。
- 前記器具シャフトに沿って延び、前記第1のアクチュエータ係合部材で終端する、前記エンドエフェクタに連結される第1の張力付与部材と、
前記器具シャフトに沿って延び、前記第2のアクチュエータ係合部材で終端する、前記エンドエフェクタに連結される第2の張力付与部材と、
前記第1の張力付与部材に張力を付与するように位置付けられる第1の予荷重張力付与部材と、
前記第2の張力付与部材に張力を付与するように位置付けられる第2の予荷重張力付与部材と、を更に含む、
請求項1乃至7のうちのいずれか1項に記載の手術器具。 - 前記近位端部分に移動可能に連結される第3のアクチュエータ係合部材と、
前記近位端部分に移動可能に連結される第4のアクチュエータ係合部材と、を更に含み、
前記エンドエフェクタは、前記1つ又はそれよりも多くの自由度のうちの第2の自由度を有し、
前記第3のアクチュエータ係合部材は、前記第3のアクチュエータ係合部材の近位方向への移動が前記エンドエフェクタを前記第2の自由度において移動させ且つ前記第4のアクチュエータ係合部材を遠位方向に移動させるよう、前記エンドエフェクタを介して前記第4のアクチュエータ係合部材に連結され、
前記第3のアクチュエータ係合部材は、第3の非拘束係合において、第3の器具駆動ユニットアクチュエータが前記第3のアクチュエータ係合部材に向かう方向において前記第3の器具駆動ユニットアクチュエータと係合するように構成され、
前記第4のアクチュエータ係合部材は、第4の非拘束係合において、第4の器具駆動ユニットアクチュエータが前記第4のアクチュエータ係合部材に向かう方向において前記第4の器具駆動ユニットアクチュエータと係合するように構成され、
前記第3の非拘束係合において前記3の器具駆動ユニットアクチュエータが前記第3のアクチュエータ係合部材に向かう前記方向は、前記第4の非拘束係合において前記第4の器具駆動ユニットアクチュエータが前記第4のアクチュエータ係合部材に向かう前記方向と同じである、
請求項1乃至8のうちのいずれか1項に記載の手術器具。 - 前記第1及び第2のアクチュエータ係合部材は、当該手術器具の前記近位端部分にある第1の共通の長手方向場所に配置され、前記第3及び第4のアクチュエータ係合部材は、当該手術器具の前記近位端部分にある第2の共通の長手方向場所に配置され、前記第1、第2、第3、及び第4のアクチュエータ係合部材は、それぞれ、前記近位端部分上で長手方向にスライドする、請求項9に記載の手術器具。
- 前記第1、第2、第3、及び第4のアクチュエータ係合部材は、当該手術器具の前記近位端部分にある共通の長手方向場所に配置され、前記第1、第2、第3、及び第4のアクチュエータ係合部材は、それぞれ、前記近位端部分上で長手方向にスライドする、請求項9に記載の手術器具。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662379114P | 2016-08-24 | 2016-08-24 | |
| US201662379112P | 2016-08-24 | 2016-08-24 | |
| US62/379,112 | 2016-08-24 | ||
| US62/379,114 | 2016-08-24 | ||
| PCT/US2017/048425 WO2018039459A1 (en) | 2016-08-24 | 2017-08-24 | Computer-assisted tele-operated surgery systems and methods |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019524359A JP2019524359A (ja) | 2019-09-05 |
| JP7145845B2 true JP7145845B2 (ja) | 2022-10-03 |
Family
ID=61245228
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019510440A Active JP7145845B2 (ja) | 2016-08-24 | 2017-08-24 | コンピュータ支援遠隔操作手術システム及び方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (3) | US11020192B2 (ja) |
| EP (1) | EP3503836B1 (ja) |
| JP (1) | JP7145845B2 (ja) |
| KR (1) | KR102443635B1 (ja) |
| CN (1) | CN109843207B (ja) |
| WO (1) | WO2018039459A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3503836B1 (en) | 2016-08-24 | 2024-06-05 | Intuitive Surgical Operations, Inc. | Computer-assisted tele-operated surgery systems |
| CN109688961B (zh) * | 2016-09-15 | 2023-01-31 | 直观外科手术操作公司 | 计算机辅助远程操作手术系统和方法 |
| WO2019164856A1 (en) | 2018-02-20 | 2019-08-29 | Intuitive Surgical Operations, Inc. | Systems and methods for control of end effectors |
| WO2020081429A1 (en) | 2018-10-15 | 2020-04-23 | Intuitive Surgical Operations, Inc. | Systems and methods for sterilization and storage of a sterilized teleoperated component |
| US11357597B2 (en) * | 2020-02-17 | 2022-06-14 | Verb Surgical Inc. | Method and system for data exchange with robotic surgical tools using near field communication (NFC) |
| FR3109718B1 (fr) * | 2020-04-30 | 2022-04-29 | Satt Axlr | Mécanisme de manipulation d’un instrument chirurgical |
| CN121818099A (zh) | 2020-07-28 | 2026-04-10 | 直观外科手术操作公司 | 用于为计算机辅助设备的部件选择分配的系统和方法 |
| CN112402021B (zh) * | 2020-09-30 | 2024-09-27 | 深圳市精锋医疗科技股份有限公司 | 手术器械、从操作设备及手术机器人 |
| US12017369B2 (en) * | 2020-10-05 | 2024-06-25 | Verb Surgical Inc. | Null space control for end effector joints of a robotic instrument |
| US12527638B2 (en) | 2021-01-11 | 2026-01-20 | Mazor Robotics Ltd. | Systems, methods, and devices for robotic manipulation of the spine |
| US11844585B1 (en) * | 2023-02-10 | 2023-12-19 | Distalmotion Sa | Surgical robotics systems and devices having a sterile restart, and methods thereof |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015064692A1 (ja) | 2013-10-31 | 2015-05-07 | オリンパス株式会社 | 術具 |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5397323A (en) | 1992-10-30 | 1995-03-14 | International Business Machines Corporation | Remote center-of-motion robot for surgery |
| EP2266466B1 (en) * | 1995-06-07 | 2015-04-22 | SRI International | Surgical manipulator for a telerobotic system |
| US5855583A (en) | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US6451027B1 (en) | 1998-12-16 | 2002-09-17 | Intuitive Surgical, Inc. | Devices and methods for moving an image capture device in telesurgical systems |
| US20030040758A1 (en) * | 2001-08-21 | 2003-02-27 | Yulun Wang | Robotically controlled surgical instrument, visual force-feedback |
| US7331967B2 (en) | 2002-09-09 | 2008-02-19 | Hansen Medical, Inc. | Surgical instrument coupling mechanism |
| EP1815949A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Medical robotic system with manipulator arm of the cylindrical coordinate type |
| US8151661B2 (en) | 2006-06-30 | 2012-04-10 | Intuituve Surgical Operations, Inc. | Compact capstan |
| US7391173B2 (en) | 2006-06-30 | 2008-06-24 | Intuitive Surgical, Inc | Mechanically decoupled capstan drive |
| US9259274B2 (en) | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| CA2747768C (en) * | 2008-12-23 | 2018-05-15 | Richard Paul Bennett | Transmission with first and second transmission elements |
| EP2485674B1 (en) | 2009-11-13 | 2018-01-03 | Intuitive Surgical Operations, Inc. | Surgical tool with a compact wrist |
| IT1401438B1 (it) * | 2010-08-04 | 2013-07-26 | Surgica Robotica S P A | Utensile chirurgico robotizzato. |
| EP2627278B1 (en) * | 2010-10-11 | 2015-03-25 | Ecole Polytechnique Fédérale de Lausanne (EPFL) | Mechanical manipulator for surgical instruments |
| CN102119872B (zh) * | 2011-01-10 | 2012-11-07 | 天津大学 | 微创外科手术机器人紧凑型快换机构 |
| CN103732161B (zh) * | 2011-08-15 | 2016-11-09 | 直观外科手术操作公司 | 带有软爪和/或柔性腕机构的医疗器械 |
| US8968312B2 (en) * | 2011-11-16 | 2015-03-03 | Covidien Lp | Surgical device with powered articulation wrist rotation |
| US9402555B2 (en) * | 2011-12-29 | 2016-08-02 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Drive assembly for use in a robotic control and guidance system |
| US20140005718A1 (en) * | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Multi-functional powered surgical device with external dissection features |
| CN104622583B (zh) | 2012-07-03 | 2017-10-27 | 库卡实验仪器有限公司 | 手术器械组、特别是机器人引导的手术器械的传动器组和手术器械 |
| US9839481B2 (en) * | 2013-03-07 | 2017-12-12 | Intuitive Surgical Operations, Inc. | Hybrid manual and robotic interventional instruments and methods of use |
| WO2015052629A1 (en) | 2013-10-07 | 2015-04-16 | Srivastava Sudhir Prem | Modular interface for a robotic system |
| US9713509B2 (en) | 2013-10-24 | 2017-07-25 | Auris Surgical Robotics, Inc. | Instrument device manipulator with back-mounted tool attachment mechanism |
| JP6138071B2 (ja) * | 2014-02-26 | 2017-05-31 | オリンパス株式会社 | 弛み補正機構、マニピュレータ及びマニピュレータシステム |
| US10639113B2 (en) | 2014-05-13 | 2020-05-05 | Covidien Lp | Robotic surgical systems and instrument drive units |
| CN107072722B (zh) | 2014-09-15 | 2020-05-12 | 柯惠Lp公司 | 机器人控制手术组件 |
| CN107072732B (zh) | 2014-10-23 | 2019-07-05 | 柯惠Lp公司 | 用于机器人手术器械的驱动单元和齿条铺单 |
| EP3206842B1 (en) | 2014-12-11 | 2019-05-29 | Titan Medical Inc. | Actuator for manipulating a tool |
| WO2016137611A1 (en) * | 2015-02-26 | 2016-09-01 | Covidien Lp | Instrument drive unit including lead screw rails |
| ES2897505T3 (es) | 2015-03-10 | 2022-03-01 | Covidien Lp | Sistemas quirúrgicos robóticos, unidades de accionamiento de instrumentos, y conjuntos de accionamiento |
| WO2016183054A1 (en) | 2015-05-11 | 2016-11-17 | Covidien Lp | Coupling instrument drive unit and robotic surgical instrument |
| EP3325233A1 (en) | 2015-07-23 | 2018-05-30 | SRI International Inc. | Robotic arm and robotic surgical system |
| CN113229942B (zh) | 2015-09-09 | 2024-11-12 | 奥瑞斯健康公司 | 手术器械装置操纵器 |
| US10500000B2 (en) | 2016-08-16 | 2019-12-10 | Ethicon Llc | Surgical tool with manual control of end effector jaws |
| EP3503836B1 (en) | 2016-08-24 | 2024-06-05 | Intuitive Surgical Operations, Inc. | Computer-assisted tele-operated surgery systems |
| US11058503B2 (en) * | 2017-05-11 | 2021-07-13 | Distalmotion Sa | Translational instrument interface for surgical robot and surgical robot systems comprising the same |
-
2017
- 2017-08-24 EP EP17844421.2A patent/EP3503836B1/en active Active
- 2017-08-24 WO PCT/US2017/048425 patent/WO2018039459A1/en not_active Ceased
- 2017-08-24 JP JP2019510440A patent/JP7145845B2/ja active Active
- 2017-08-24 US US16/325,978 patent/US11020192B2/en active Active
- 2017-08-24 CN CN201780060908.3A patent/CN109843207B/zh active Active
- 2017-08-24 KR KR1020197007869A patent/KR102443635B1/ko active Active
-
2021
- 2021-04-30 US US17/246,008 patent/US11589938B2/en active Active
-
2023
- 2023-01-06 US US18/151,185 patent/US12011242B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015064692A1 (ja) | 2013-10-31 | 2015-05-07 | オリンパス株式会社 | 術具 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3503836B1 (en) | 2024-06-05 |
| US11589938B2 (en) | 2023-02-28 |
| US20230149103A1 (en) | 2023-05-18 |
| WO2018039459A1 (en) | 2018-03-01 |
| KR20190035917A (ko) | 2019-04-03 |
| US20190175294A1 (en) | 2019-06-13 |
| US12011242B2 (en) | 2024-06-18 |
| JP2019524359A (ja) | 2019-09-05 |
| US11020192B2 (en) | 2021-06-01 |
| EP3503836A4 (en) | 2020-04-15 |
| US20210251705A1 (en) | 2021-08-19 |
| EP3503836A1 (en) | 2019-07-03 |
| KR102443635B1 (ko) | 2022-09-15 |
| CN109843207A (zh) | 2019-06-04 |
| CN109843207B (zh) | 2021-12-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12171516B2 (en) | Computer-assisted tele-operated surgery systems and methods | |
| US12496155B2 (en) | Computer-assisted medical systems and methods | |
| JP7145845B2 (ja) | コンピュータ支援遠隔操作手術システム及び方法 | |
| US12446982B2 (en) | Systems and methods for control of end effectors | |
| US20230112200A1 (en) | Computer-assisted teleoperated surgery systems and methods | |
| CN109715104B (zh) | 计算机辅助远程操作手术系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200814 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210618 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210622 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210917 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220607 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20220607 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20220614 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20220621 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220830 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220920 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7145845 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |