JP7148653B2 - リニア運動システムの位置測定機構及びその測定方法 - Google Patents
リニア運動システムの位置測定機構及びその測定方法 Download PDFInfo
- Publication number
- JP7148653B2 JP7148653B2 JP2021002380A JP2021002380A JP7148653B2 JP 7148653 B2 JP7148653 B2 JP 7148653B2 JP 2021002380 A JP2021002380 A JP 2021002380A JP 2021002380 A JP2021002380 A JP 2021002380A JP 7148653 B2 JP7148653 B2 JP 7148653B2
- Authority
- JP
- Japan
- Prior art keywords
- detection unit
- detection
- measurement
- unit
- signal detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Description





111、112 スペーサ
20 ベース部
21 固定子
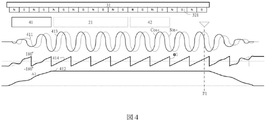
217 第1測定範囲
227 第2測定範囲
241 始点
242 終点
248 高閾値
249 低閾値
30 運動部
31 キャリア
32 磁石アレイ
321 磁石
40 測定モジュール
401 重複領域
402a、402b 信頼度の低い周期
403 測定範囲
41 第1検出部
411 正弦
412、421 振幅
413 余弦
414、422 サブ周期
42 第2検出部
H1~H8 感磁素子
43 第3検出部
431 信号ユニット
432 センシング素子
433 結合点
434 零点
435 信号
44 処理部
50 アクチュエータ
60 モーションコントローラ
61 フィールドバス
τ 磁気周期
α サブ周期(図示しない)
α10 サブ周期閾値
A1、A2 振幅
α1、α2 サブ周期
L1 測定スケールの長さ
L2 検出部の長さ
L21 固定子の長さ
L11、L40、L211、L25 間隔距離
L1010 最小距離
L13 間隔長さ
L431 信号ユニットの長さ
P1 現位置
Ls、Lf 変位距離(図示しない)
Claims (9)
- ベース部と、
前記ベース部に対して移動可能な、運動部と、
前記運動部中に設けられた、少なくとも1つの磁石アレイと、
磁石アレイの磁場を検出するため、ベース部に間隔を空けてそれぞれ設けられた、第1検出部及び第2検出部と、
前記運動部に設けられた信号ユニット、及び前記ベース部に設けられ且つ前記信号ユニットを検出するためのセンシング素子を有する、第3検出部と、
前記第1検出部及び前記第2検出部の検出信号をそれぞれ受信し、対応する前記磁石アレイのサブ周期をそれぞれ算出した後、前記センシング素子の検出情報と合わせて演算することにより、前記運動部の運動経路を取得し、アクチュエータにフィードバックして、前記運動部の運動パターンを調整する、処理部と、を含み、
前記第1検出部と前記第2検出部がそれぞれ測定範囲中で検出した信号を結合点で結合し、
前記運動部が右から左へ運動して移動する場合、前記測定範囲の始点は、前記第1検出部が検出した信号の振幅が所定の高閾値よりも小さく、且つ前記第1検出部が検出した信号のサブ周期位置が180°に等しいと定義され、前記測定範囲の終点は、前記第2検出部が検出した信号の振幅が所定の低閾値を上回り、且つ前記第2検出部が検出した信号のサブ周期位置が180°に等しいと定義され、
前記運動部が左から右へ運動して移動する場合、前記測定範囲の始点は、前記第1検出部が検出した信号の振幅が低閾値よりも大きく、且つ前記第1検出部が検出した信号のサブ周期位置が180°に等しいと定義され、前記測定範囲の終点は、前記第2検出部が検出した信号の振幅が低閾値よりも小さく、且つ前記第2検出部が検出した信号のサブ周期位置が180°に等しいと定義される、位置測定機構。 - 前記磁石アレイは複数の磁石を有し、磁性が同じである2つの磁石同士の最小距離が前記磁石アレイの磁気周期であり、且つ前記磁石アレイの長さを前記磁石アレイの磁気周期の整数倍とした、請求項1に記載の位置測定機構。
- 前記磁石アレイの数は2つであり、互いに隣接するように前記運動部に配置され、隣接する2つの磁石アレイの距離は少なくとも2つの磁気周期である、請求項2に記載の位置測定機構。
- それぞれが前記第1検出部、前記第2検出部及び前記第3検出部を含む複数の測定モジュールをさらに含み、隣接する2つの測定モジュール同士の距離は前記磁石アレイの長さと等しい、請求項1に記載の位置測定機構。
- 前記第1検出部と前記第2検出部はそれぞれ8つの感磁素子を含み、各前記感磁素子はそれぞれ磁石アレイの磁気周期の四分の一の距離で左から右へ順に配列され、第1感磁素子と第5感磁素子が並列接続され、第2感磁素子と第6感磁素子が並列接続され、第3感磁素子と第7感磁素子が並列接続され、第4感磁素子と第8感磁素子が並列接続された、請求項1に記載の位置測定機構。
- 前記アクチュエータは、前記ベース部に設けられた固定子に対して電流制御を行い、フィールドバスを用いてモーションコントローラに接続される、請求項2に記載の位置測定機構。
- 前記第1検出部は前記固定子の左側に位置し、前記第2検出部は前記固定子の右側に位置し、
前記第1検出部と前記第2検出部の間の間隔距離は、前記磁気周期の整数倍であり、
前記磁石アレイの長さは、前記第1検出部と前記第2検出部の間の間隔距離よりも大きく、且つ前記磁石アレイの少なくとも4つの磁気周期であり、
前記第3検出部は、基準となる結合点を提供するものであり、前記第1検出部と前記第2検出部の信号を結合することができる、請求項6に記載の位置測定機構。 - 請求項1~請求項7のいずれか1項に記載の前記第1検出部と前記第2検出部がそれぞれ測定範囲中で検出した信号を結合点で結合し、
前記運動部が右から左へ運動して移動する場合、前記測定範囲の始点は、前記第1検出部が検出した信号の振幅が所定の高閾値よりも小さく、且つ前記第1検出部が検出した信号のサブ周期位置が180°に等しいと定義され、前記測定範囲の終点は、前記第2検出部が検出した信号の振幅が所定の低閾値を上回り、且つ前記第2検出部が検出した信号のサブ周期位置が180°に等しいと定義され、
前記運動部が左から右へ運動して移動する場合、前記測定範囲の始点は、前記第1検出部が検出した信号の振幅が低閾値よりも大きく、且つ前記第1検出部が検出した信号のサブ周期位置が180°に等しいと定義され、前記測定範囲の終点は、前記第2検出部が検出した信号の振幅が低閾値よりも小さく、且つ前記第2検出部が検出した信号のサブ周期位置が180°に等しいと定義される、位置測定方法。 - 前記測定範囲は、前記結合点によって前記第1検出部の第1測定区間と前記第2検出部の第2測定区間に区分され、前記第1測定区間と前記第2測定区間はそれぞれ前記運動部の作動方向に沿って配置され、且つ互いに近接している、請求項8に記載の位置測定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021002380A JP7148653B2 (ja) | 2021-01-08 | 2021-01-08 | リニア運動システムの位置測定機構及びその測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021002380A JP7148653B2 (ja) | 2021-01-08 | 2021-01-08 | リニア運動システムの位置測定機構及びその測定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022107431A JP2022107431A (ja) | 2022-07-21 |
| JP7148653B2 true JP7148653B2 (ja) | 2022-10-05 |
Family
ID=82457636
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021002380A Active JP7148653B2 (ja) | 2021-01-08 | 2021-01-08 | リニア運動システムの位置測定機構及びその測定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7148653B2 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001074505A (ja) | 1999-08-31 | 2001-03-23 | Sony Precision Technology Inc | 位置検出装置 |
| JP2001174286A (ja) | 1999-12-16 | 2001-06-29 | Fdk Corp | 磁気エンコーダ |
| JP2008536145A (ja) | 2005-04-13 | 2008-09-04 | エスアールアイ インターナショナル | 移動する構成要素の位置を磁気的に感知するシステムおよび方法 |
-
2021
- 2021-01-08 JP JP2021002380A patent/JP7148653B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001074505A (ja) | 1999-08-31 | 2001-03-23 | Sony Precision Technology Inc | 位置検出装置 |
| JP2001174286A (ja) | 1999-12-16 | 2001-06-29 | Fdk Corp | 磁気エンコーダ |
| JP2008536145A (ja) | 2005-04-13 | 2008-09-04 | エスアールアイ インターナショナル | 移動する構成要素の位置を磁気的に感知するシステムおよび方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022107431A (ja) | 2022-07-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5567823B2 (ja) | リニアスケール、リニアモータ、及びリニアモータの制御装置 | |
| US7723942B1 (en) | Integrated motor and resolver including absolute position capability | |
| US5412317A (en) | Position detector utilizing absolute and incremental position sensors in combination | |
| EP1132717B1 (en) | Linear position sensor using magnetic fields | |
| CN102474217A (zh) | 分布式布置的直线电机及分布式布置的直线电机的控制方法 | |
| US7538460B2 (en) | Integrated resolver for high pole count motors | |
| JP7723795B2 (ja) | 長尺リニア永久磁石モータのための位置センサ | |
| US10480961B2 (en) | Hybrid encoder system for position determination | |
| KR101420118B1 (ko) | 위치 센서와 위치 검출 방법 | |
| CN110118552B (zh) | 位置检测装置及位置检测方法 | |
| KR101027935B1 (ko) | 선형 위치 검출용 자기 센서 및 이를 이용한 선형 전동기 위치 검출 방법 | |
| JP7148653B2 (ja) | リニア運動システムの位置測定機構及びその測定方法 | |
| US7999535B2 (en) | Measuring device for determining a position between a primary part and a secondary part by magnetic flux measurements | |
| JP5529637B2 (ja) | リニアモータの位置検出システム | |
| EP4030146B1 (en) | Position measuring mechanism and measuring method of linear motion system | |
| KR102533280B1 (ko) | 선형 운동 시스템의 위치 측정 기구 및 이의 측정 방법 | |
| TWI774180B (zh) | 線性運動系統之位置量測機構及其量測方法 | |
| US11774521B2 (en) | Position measuring mechanism and measuring method of linear motion system | |
| Lequesne et al. | High-accuracy magnetic position encoder concept | |
| CN114739272A (zh) | 线性运动系统的位置量测机构及其量测方法 | |
| Poltschak et al. | Embedded Absolute Position Detection for Permanent Magnet Linear Motors with Passive Track | |
| JP2023124791A (ja) | 測位切替装置、駆動装置、測位切替方法 | |
| US20090278530A1 (en) | Sensor system | |
| JP2023180003A (ja) | 測位装置、駆動装置 | |
| JP2023128398A (ja) | 測位装置、駆動装置、測位方法、測位プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210108 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220301 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220420 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220906 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220922 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7148653 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |