JP7200744B2 - 空気圧式工具 - Google Patents
空気圧式工具 Download PDFInfo
- Publication number
- JP7200744B2 JP7200744B2 JP2019030820A JP2019030820A JP7200744B2 JP 7200744 B2 JP7200744 B2 JP 7200744B2 JP 2019030820 A JP2019030820 A JP 2019030820A JP 2019030820 A JP2019030820 A JP 2019030820A JP 7200744 B2 JP7200744 B2 JP 7200744B2
- Authority
- JP
- Japan
- Prior art keywords
- compressed air
- valve
- solenoid valve
- control unit
- grip
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 35
- 230000004913 activation Effects 0.000 claims description 14
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 10
- 238000012423 maintenance Methods 0.000 description 9
- 230000004048 modification Effects 0.000 description 8
- 238000012986 modification Methods 0.000 description 8
- 230000005611 electricity Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000011144 upstream manufacturing Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
Images









Landscapes
- Portable Nailing Machines And Staplers (AREA)
Description
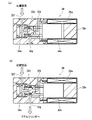
変形例1について、図8~11を参照しながら説明する。なお、本変形例の基本的構成は上記した実施形態と相違しないため、重複する記載を避けて、相違する箇所のみを説明する。
上記した実施形態においては、空気圧式工具10がバッテリ36で駆動する態様について説明したが、これに限らず、空気圧式工具10が外部電源で作動するようにしてもよい。
11 工具本体
12 ボデーハウジング
13 駆動機構
14 シリンダ
15 ピストン
16 ドライバ
17 ヘッドバルブ
20 ノーズ部
20a 射出口
21 コンタクト部材
22 コンタクトアーム
23 マガジン
25 グリップハウジング
26 メインチャンバ
27 摺動子
30 グリップエンド部材
30a 管継手
31 制御ユニット
32 電磁弁
32a コイル
32b 固定鉄心
32c 可動鉄心
32d 弁体
32e エア流路
32f エア入口
32g エア出口
32h 排気口
33 バルブステム
33a ステムピストン
33b ステムシリンダ
33c エア切り替え部
34 制御基板
35 電源供給端子
36 バッテリ
38 電気コネクティングロッド
38a 接点部
40 起動ユニット
41 電磁弁用スイッチ
42 パイロットバルブ
43 コンタクトスイッチ
44 操作部
44a 揺動軸
44b 押圧部
45 従動部材
46 ステム接続部
47 ロッド接続部
48 コンタクトレバー
50 エア式制御ユニット
51 トリガバルブ
55 ホース
56 プラグ
58 電源ケーブル
D1 グリップハウジングの延設方向
Claims (4)
- 圧縮空気の空気圧によって作動する駆動機構と、
前記駆動機構への圧縮空気の供給を制御するための電磁弁と、
前記電磁弁の作動を制御する制御基板と、
電源供給を受けるための電源供給端子と、
を備え、
前記電磁弁と前記制御基板とをユニット化して制御ユニットを構成し、前記制御ユニットを工具本体に対して一体的に着脱可能とし、
作業者が把持可能に形成されたグリップハウジングを備え、
前記グリップハウジング内には、圧縮空気を貯留するメインチャンバが形成されるとともに、前記グリップハウジングの端部には、前記メインチャンバを閉塞するグリップエンド部材が取り付けられており、
前記制御ユニットは、前記グリップエンド部材に取り付けられていることを特徴とする、空気圧式工具。 - 圧縮空気の空気圧によって作動する駆動機構と、
前記駆動機構への圧縮空気の供給を制御するための電磁弁と、
前記電磁弁の作動を制御する制御基板と、
電源供給を受けるための電源供給端子と、
を備え、
前記電磁弁と前記制御基板とをユニット化して制御ユニットを構成し、前記制御ユニットを工具本体に対して一体的に着脱可能とし、
前記電磁弁の開閉状態を切り換えるための電磁弁用スイッチと、
圧縮空気の流通経路を切り替えるために前記電磁弁に連動して作動するパイロットバルブと、
をユニット化して起動ユニットを構成し、前記起動ユニットを工具本体に対して一体的に着脱可能としたことを特徴とする、空気圧式工具。 - 前記制御ユニットと前記起動ユニットとは、それぞれ個別に工具本体に対して取り付け可能であり、工具本体の内部で互いに接続可能であることを特徴とする、請求項2記載の空気圧式工具。
- 作業者が把持可能に形成されたグリップハウジングを備え、
前記グリップハウジング内には、圧縮空気を貯留するメインチャンバが形成されるとともに、前記グリップハウジングの端部には、前記メインチャンバを閉塞するグリップエンド部材が取り付けられており、
前記制御ユニットは、前記グリップエンド部材に取り付けられていることを特徴とする、請求項2または3記載の空気圧式工具。
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019030820A JP7200744B2 (ja) | 2019-02-22 | 2019-02-22 | 空気圧式工具 |
| DK20158539.5T DK3698925T3 (da) | 2019-02-22 | 2020-02-20 | Pneumatisk værktøj |
| EP20158539.5A EP3698925B1 (en) | 2019-02-22 | 2020-02-20 | Pneumatic tool |
| EP21169273.6A EP3885075B1 (en) | 2019-02-22 | 2020-02-20 | Pneumatic tool |
| TW109105641A TWI833909B (zh) | 2019-02-22 | 2020-02-21 | 氣壓式工具 |
| CN202010106945.7A CN111604862A (zh) | 2019-02-22 | 2020-02-21 | 空气压力式工具 |
| US16/797,563 US11400575B2 (en) | 2019-02-22 | 2020-02-21 | Pneumatic tool |
| AU2020201304A AU2020201304B2 (en) | 2019-02-22 | 2020-02-21 | Pneumatic tool |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019030820A JP7200744B2 (ja) | 2019-02-22 | 2019-02-22 | 空気圧式工具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020131391A JP2020131391A (ja) | 2020-08-31 |
| JP7200744B2 true JP7200744B2 (ja) | 2023-01-10 |
Family
ID=72277309
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019030820A Active JP7200744B2 (ja) | 2019-02-22 | 2019-02-22 | 空気圧式工具 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7200744B2 (ja) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009270695A (ja) | 2008-05-12 | 2009-11-19 | Walbro Japan Inc | 電磁弁装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3287172B2 (ja) * | 1995-04-05 | 2002-05-27 | マックス株式会社 | 釘打ち機のトリガ装置 |
-
2019
- 2019-02-22 JP JP2019030820A patent/JP7200744B2/ja active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009270695A (ja) | 2008-05-12 | 2009-11-19 | Walbro Japan Inc | 電磁弁装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020131391A (ja) | 2020-08-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6408944B2 (ja) | 打ち込み工具 | |
| JP3254243B2 (ja) | 順序作動トリガー組立体を有するファスナー駆動装置 | |
| AU2012245167B2 (en) | Fastening tool with dual pneumatic handle | |
| TWI389775B (zh) | Nailing machine | |
| TWI457212B (zh) | Nailing machine | |
| JP7200684B2 (ja) | 打ち込み工具 | |
| US11400575B2 (en) | Pneumatic tool | |
| JP7200744B2 (ja) | 空気圧式工具 | |
| JP7263831B2 (ja) | 空気圧式工具 | |
| WO2014087934A1 (ja) | 打込み工具 | |
| JP7263832B2 (ja) | 空気圧式工具 | |
| EP1459849A1 (en) | Safety device of air impact screwdriver | |
| EP3932618B1 (en) | Pneumatic tool | |
| EP4238701A2 (en) | Driving tool | |
| JP7205290B2 (ja) | 空気圧式工具 | |
| EP3246131B1 (en) | Hand tool | |
| EP1797998A1 (en) | Pneumatic tool with direction switch operable with single hand | |
| EP0774327A1 (en) | Fastener driving device with improved control valve assembly and trigger sensitivity adjustment | |
| US3999271A (en) | Terminal block installation tool | |
| JPH0616671Y2 (ja) | 釘打機における安全装置 | |
| HK1066188A (en) | Safety device of air impact screwdriver | |
| JPH0639371U (ja) | ハンドプライヤー型ホッチキス用駆動装置 | |
| JP2005212006A (ja) | 固着具打込装置 | |
| TW201431654A (zh) | 氣動釘槍 | |
| JP2003048175A (ja) | エアインパクトドライバの安全装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211223 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220830 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220906 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221122 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221205 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7200744 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |