JP7201542B2 - 転がり軸受、回転装置、軸受監視装置、軸受監視方法 - Google Patents
転がり軸受、回転装置、軸受監視装置、軸受監視方法 Download PDFInfo
- Publication number
- JP7201542B2 JP7201542B2 JP2019115678A JP2019115678A JP7201542B2 JP 7201542 B2 JP7201542 B2 JP 7201542B2 JP 2019115678 A JP2019115678 A JP 2019115678A JP 2019115678 A JP2019115678 A JP 2019115678A JP 7201542 B2 JP7201542 B2 JP 7201542B2
- Authority
- JP
- Japan
- Prior art keywords
- rolling bearing
- resistor
- outer ring
- strain
- rolling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/52—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions
- F16C19/522—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions related to load on the bearing, e.g. bearings with load sensors or means to protect the bearing against overload
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C41/00—Other accessories, e.g. devices integrated in the bearing not relating to the bearing function as such
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/02—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/02—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows
- F16C19/14—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load
- F16C19/16—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load with a single row of balls
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/22—Bearings with rolling contact, for exclusively rotary movement with bearing rollers essentially of the same size in one or more circular rows, e.g. needle bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/52—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions
- F16C19/527—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions related to vibration and noise
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C33/00—Parts of bearings; Special methods for making bearings or parts thereof
- F16C33/30—Parts of ball or roller bearings
- F16C33/58—Raceways; Race rings
- F16C33/583—Details of specific parts of races
- F16C33/586—Details of specific parts of races outside the space between the races, e.g. end faces or bore of inner ring
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C35/00—Rigid support of bearing units; Housings, e.g. caps, covers
- F16C35/04—Rigid support of bearing units; Housings, e.g. caps, covers in the case of ball or roller bearings
- F16C35/06—Mounting or dismounting of ball or roller bearings; Fixing them onto shaft or in housing
- F16C35/067—Fixing them in a housing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M13/00—Testing of machine parts
- G01M13/04—Bearings
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M13/00—Testing of machine parts
- G01M13/04—Bearings
- G01M13/045—Acoustic or vibration analysis
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/02—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows
- F16C19/04—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for radial load mainly
- F16C19/06—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for radial load mainly with a single row or balls
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2233/00—Monitoring condition, e.g. temperature, load, vibration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2240/00—Specified values or numerical ranges of parameters; Relations between them
- F16C2240/40—Linear dimensions, e.g. length, radius, thickness, gap
- F16C2240/60—Thickness, e.g. thickness of coatings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2240/00—Specified values or numerical ranges of parameters; Relations between them
- F16C2240/40—Linear dimensions, e.g. length, radius, thickness, gap
- F16C2240/60—Thickness, e.g. thickness of coatings
- F16C2240/64—Thickness, e.g. thickness of coatings in the nanometer range
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2240/00—Specified values or numerical ranges of parameters; Relations between them
- F16C2240/90—Surface areas
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C33/00—Parts of bearings; Special methods for making bearings or parts thereof
- F16C33/30—Parts of ball or roller bearings
- F16C33/38—Ball cages
- F16C33/41—Ball cages comb-shaped
- F16C33/412—Massive or moulded comb cages, e.g. snap ball cages
- F16C33/414—Massive or moulded comb cages, e.g. snap ball cages formed as one-piece cages, i.e. monoblock comb cages
- F16C33/416—Massive or moulded comb cages, e.g. snap ball cages formed as one-piece cages, i.e. monoblock comb cages made from plastic, e.g. injection moulded comb cages
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C33/00—Parts of bearings; Special methods for making bearings or parts thereof
- F16C33/30—Parts of ball or roller bearings
- F16C33/66—Special parts or details in view of lubrication
- F16C33/6603—Special parts or details in view of lubrication with grease as lubricant
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Rolling Contact Bearings (AREA)
- Testing Of Devices, Machine Parts, Or Other Structures Thereof (AREA)
- Mounting Of Bearings Or Others (AREA)
Description
[転がり軸受]
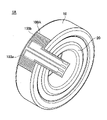
図1は、第1実施形態に係る転がり軸受を例示する斜視図である。図2は、第1実施形態に係る転がり軸受を例示する図であり、図2(a)は正面図、図2(b)は断面図、図2(c)は背面図である。
図5は、第1実施形態に係る軸受監視装置を例示するブロック図である。図5を参照すると、軸受監視装置200は、転がり軸受1と、アナログフロントエンド部210と、演算部220とを有する。
振幅や周期を算出したり、それらを基準値と比較したりすることを含む。演算部220は、例えば、デジタル化されたひずみ波形の振幅又は周期に基づいて、転がり軸受1の運転状態を監視する。
第1実施形態の変形例では、第1実施形態とは異なるひずみゲージを備えた転がり軸受の例を示す。なお、第1実施形態の変形例において、既に説明した実施形態と同一構成部についての説明は省略する場合がある。
第2実施形態では、外輪の外側にハウジングを有する転がり軸受の例を示す。なお、第2実施形態において、既に説明した実施形態と同一構成部についての説明は省略する場合がある。
Claims (7)
- 外輪と、
前記外輪の内周側に前記外輪と同軸状に配置された内輪と、
前記外輪と前記内輪との間に配置された複数の転動体と、
前記外輪又は前記内輪のひずみを検出するひずみゲージと、
前記外輪の外周に接して配置された筐体と、を有し、
前記ひずみゲージは、Cr混相膜から形成された抵抗体を備え、
前記外輪の回転軸と平行な方向に予圧が与えられ、
前記抵抗体は、前記外輪の外周面の反予圧側に配置され、
前記転動体の真上に位置する前記外輪の外周面は、全周に亘って前記筐体の内周面と接している転がり軸受。 - 前記抵抗体は、隣接する前記転動体の間隔に合わせて、前記転動体の配列方向と同一方向に配列された2つの抵抗体を含む請求項1に記載の転がり軸受。
- 前記抵抗体は、隣接する前記転動体の間隔の半分の間隔に合わせて、前記転動体の配列方向と同一方向に配列された4つの抵抗体を含む請求項1に記載の転がり軸受。
- 前記抵抗体は、長手方向を前記外輪又は前記内輪の周方向に向けて配置されている請求項1乃至3の何れか一項に記載の転がり軸受。
- 請求項1乃至4の何れか一項に記載の転がり軸受を有する回転装置。
- 請求項1乃至4の何れか一項に記載の転がり軸受と、
前記抵抗体の出力に基づいて、ひずみ波形を生成する波形生成部と、
前記ひずみ波形に演算処理を行い、前記転がり軸受の運転状態を監視する演算部と、を有し、
前記演算部は、前記ひずみ波形の振幅及び/又は周期と、前記転がり軸受の寿命に対応する値とを用いることによって、前記転がり軸受の運転状態を監視する軸受監視装置。 - 請求項1乃至4の何れか一項に記載の転がり軸受の前記抵抗体の出力に基づいてひずみ波形を生成するステップと、
前記ひずみ波形に演算処理を行い、前記転がり軸受の運転状態を監視するステップと、を有し、
前記ひずみ波形の振幅及び/又は周期と、前記転がり軸受の寿命に対応する値とを用いることによって、前記転がり軸受の運転状態を監視する軸受監視方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019115678A JP7201542B2 (ja) | 2019-06-21 | 2019-06-21 | 転がり軸受、回転装置、軸受監視装置、軸受監視方法 |
| EP20826357.4A EP3971431B1 (en) | 2019-06-21 | 2020-06-11 | Rolling bearing, rotation device, bearing monitoring device, and bearing monitoring method |
| US17/596,448 US12331787B2 (en) | 2019-06-21 | 2020-06-11 | Rolling bearing, rotating apparatus, bearing monitoring apparatus and method for monitoring bearing |
| PCT/JP2020/023085 WO2020255861A1 (ja) | 2019-06-21 | 2020-06-11 | 転がり軸受、回転装置、軸受監視装置、軸受監視方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019115678A JP7201542B2 (ja) | 2019-06-21 | 2019-06-21 | 転がり軸受、回転装置、軸受監視装置、軸受監視方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021001661A JP2021001661A (ja) | 2021-01-07 |
| JP7201542B2 true JP7201542B2 (ja) | 2023-01-10 |
Family
ID=73994213
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019115678A Active JP7201542B2 (ja) | 2019-06-21 | 2019-06-21 | 転がり軸受、回転装置、軸受監視装置、軸受監視方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12331787B2 (ja) |
| EP (1) | EP3971431B1 (ja) |
| JP (1) | JP7201542B2 (ja) |
| WO (1) | WO2020255861A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6940243B1 (ja) * | 2021-04-22 | 2021-09-22 | 安藤 隆 | 軸受箱 |
| JP7771496B2 (ja) * | 2021-11-30 | 2025-11-18 | ミネベアミツミ株式会社 | 軸受装置、モータ、送風機、軸受装置の異常診断方法 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2746937C2 (de) * | 1977-10-17 | 1986-11-06 | Gerhard Dr.-Ing. 1000 Berlin Lechler | Kraftmeßeinrichtung |
| JPH08159151A (ja) * | 1994-12-05 | 1996-06-18 | Hitachi Ltd | 軸受診断方法 |
| US6687623B2 (en) * | 2000-05-17 | 2004-02-03 | Ntn Corporation | Real time bearing load sensing |
| JP4296758B2 (ja) * | 2002-07-24 | 2009-07-15 | 日本精工株式会社 | 鉄道車両用センサ付軸受装置 |
| DE10254814A1 (de) * | 2002-11-23 | 2004-06-03 | Fag Kugelfischer Ag | Kraftmesslager |
| DE10304592A1 (de) * | 2003-02-05 | 2004-08-19 | Fag Kugelfischer Ag | Messlager mit integriertem Datenerfassungs- und verarbeitungssystems |
| DE10323889A1 (de) * | 2003-05-27 | 2004-12-16 | Ehrfeld Mikrotechnik Ag | Wälzlager mit Polymerelektronik |
| DE102004037358B3 (de) * | 2004-07-30 | 2006-03-23 | Fag Kugelfischer Ag & Co. Ohg | Verfahren und Computerprogrammprodukt zur Stillstandsdetektion eines Wälzlagers sowie Wälzlager |
| DE102004054201A1 (de) * | 2004-11-10 | 2006-05-11 | Fag Kugelfischer Ag & Co. Ohg | Wälzlager mit in der Lagerringstirnseite integrierten Sensoren |
| JP2007032705A (ja) | 2005-07-27 | 2007-02-08 | Jtekt Corp | センサ付き転がり軸受装置及び歪みセンサ |
| US7665372B2 (en) | 2005-04-27 | 2010-02-23 | Jtekt Corporation | Rolling bearing device with sensor and strain sensor |
| KR101596398B1 (ko) | 2008-11-17 | 2016-02-22 | 엔티엔 가부시키가이샤 | 센서가 장착된 차륜용 베어링 |
| JP2010127376A (ja) * | 2008-11-27 | 2010-06-10 | Ntn Corp | センサ付車輪用軸受 |
| JP2010243190A (ja) * | 2009-04-01 | 2010-10-28 | Ntn Corp | センサ付車輪用軸受 |
| EP2413121B1 (en) | 2009-03-26 | 2020-08-26 | NTN Corporation | Sensor-equipped bearing for wheel |
| AU2014277922B2 (en) | 2013-06-14 | 2019-01-31 | Avantec Vascular Corporation | Inferior Vena Cava filter and retrieval systems |
| US9841329B2 (en) * | 2015-06-08 | 2017-12-12 | Pioner Engineering Company | Strain gage based system and method for failure detection of a fluid film bearing |
| EP3282240B1 (en) * | 2016-08-10 | 2019-07-10 | Siemens Gamesa Renewable Energy A/S | Bearing test rig |
| JP2019066453A (ja) * | 2017-09-29 | 2019-04-25 | ミネベアミツミ株式会社 | ひずみゲージ |
| JP6793103B2 (ja) * | 2017-09-29 | 2020-12-02 | ミネベアミツミ株式会社 | ひずみゲージ |
-
2019
- 2019-06-21 JP JP2019115678A patent/JP7201542B2/ja active Active
-
2020
- 2020-06-11 WO PCT/JP2020/023085 patent/WO2020255861A1/ja not_active Ceased
- 2020-06-11 EP EP20826357.4A patent/EP3971431B1/en active Active
- 2020-06-11 US US17/596,448 patent/US12331787B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3971431B1 (en) | 2024-01-31 |
| US20220307555A1 (en) | 2022-09-29 |
| WO2020255861A1 (ja) | 2020-12-24 |
| EP3971431A4 (en) | 2022-07-13 |
| JP2021001661A (ja) | 2021-01-07 |
| US12331787B2 (en) | 2025-06-17 |
| EP3971431A1 (en) | 2022-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6986050B2 (ja) | 軸受監視装置、軸受監視方法 | |
| JP7201542B2 (ja) | 転がり軸受、回転装置、軸受監視装置、軸受監視方法 | |
| CN118961017A (zh) | 扭矩检测传感器、动力传递装置以及机器人 | |
| JP7390139B2 (ja) | センサモジュール、ひずみ検出装置 | |
| JP2024010250A (ja) | モータ | |
| JP7712031B2 (ja) | 転がり軸受ホルダユニット | |
| JP7771496B2 (ja) | 軸受装置、モータ、送風機、軸受装置の異常診断方法 | |
| WO2023276365A1 (ja) | 転がり軸受 | |
| WO2019244991A1 (ja) | センサモジュール | |
| JP2023166819A (ja) | 軸受装置、ひずみ検出装置 | |
| JP7261938B2 (ja) | モータ | |
| JP7261937B2 (ja) | モータ | |
| JP2022013146A (ja) | 転がり軸受 | |
| JP2023107679A (ja) | 軸受装置、モータ、ひずみ検出装置 | |
| JP2022182909A (ja) | バイタルセンサ | |
| JP2023141893A (ja) | センサユニット、軸受装置、ひずみ検出装置、モータ | |
| JP2023141894A (ja) | センサユニット、軸受装置、ひずみ検出装置、モータ | |
| JP2023176571A (ja) | 軸受装置 | |
| WO2024252916A1 (ja) | 脈波測定装置 | |
| WO2022249717A1 (ja) | バイタルセンサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210917 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220705 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220902 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221222 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7201542 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |