JP7202580B2 - 在庫ホルダーを持つ自動運転システム - Google Patents
在庫ホルダーを持つ自動運転システム Download PDFInfo
- Publication number
- JP7202580B2 JP7202580B2 JP2021510304A JP2021510304A JP7202580B2 JP 7202580 B2 JP7202580 B2 JP 7202580B2 JP 2021510304 A JP2021510304 A JP 2021510304A JP 2021510304 A JP2021510304 A JP 2021510304A JP 7202580 B2 JP7202580 B2 JP 7202580B2
- Authority
- JP
- Japan
- Prior art keywords
- movable base
- sensors
- sensor
- console
- driving system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/063—Automatically guided
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B5/00—Accessories or details specially adapted for hand carts
- B62B5/0026—Propulsion aids
- B62B5/0069—Control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B3/00—Hand carts having more than one axis carrying transport wheels; Steering devices therefor; Equipment therefor
- B62B3/02—Hand carts having more than one axis carrying transport wheels; Steering devices therefor; Equipment therefor involving parts being adjustable, collapsible, attachable, detachable or convertible
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D63/00—Motor vehicles or trailers not otherwise provided for
- B62D63/02—Motor vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/0755—Position control; Position detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/20—Means for actuating or controlling masts, platforms, or forks
- B66F9/24—Electrical devices or systems
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/244—Arrangements for determining position or orientation using passive navigation aids external to the vehicle, e.g. markers, reflectors or magnetic means
- G05D1/2446—Arrangements for determining position or orientation using passive navigation aids external to the vehicle, e.g. markers, reflectors or magnetic means the passive navigation aids having encoded information, e.g. QR codes or ground control points
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/656—Interaction with payloads or external entities
- G05D1/667—Delivering or retrieving payloads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B2203/00—Grasping, holding, supporting the objects
- B62B2203/10—Grasping, holding, supporting the objects comprising lifting means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B2301/00—Wheel arrangements; Steering; Stability; Wheel suspension
- B62B2301/04—Wheel arrangements; Steering; Stability; Wheel suspension comprising a wheel pivotable about a substantially vertical axis, e.g. swivelling castors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B3/00—Hand carts having more than one axis carrying transport wheels; Steering devices therefor; Equipment therefor
- B62B3/002—Hand carts having more than one axis carrying transport wheels; Steering devices therefor; Equipment therefor characterised by a rectangular shape, involving sidewalls or racks
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/20—Specific applications of the controlled vehicles for transportation
- G05D2105/28—Specific applications of the controlled vehicles for transportation of freight
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2107/00—Specific environments of the controlled vehicles
- G05D2107/70—Industrial sites, e.g. warehouses or factories
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/10—Optical signals
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Automation & Control Theory (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Electromagnetism (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Purses, Travelling Bags, Baskets, Or Suitcases (AREA)
- Platform Screen Doors And Railroad Systems (AREA)
Description
コンソールの上部の第1側に配置され、可動ベースの前記第1の端部に対向する第2の端部に面する第1のカメラと、を備える。
Claims (20)
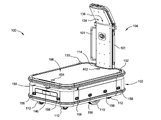
- 電動ホイールを備え、上面で物体を載置して前記物体を支持する可動ベースと、
前記可動ベース内に配置され、前記可動ベースの高さを調整するように動作可能であるアクチュエータと、
上部と、直立構成で前記可動ベースの第1の端部に結合される本体とを有するコンソールと、
前記コンソールの上部の第1側に配置され、前記可動ベースの前記第1の端部に対向する第2の端部に面する第1のカメラと、
を備え、
前記可動ベースの高さを調整する動作中、前記コンソールは静止状態に保たれ、前記可動ベースの上面は前記コンソールに対して移動される
自動運転システム。 - 前記第1のカメラは、前記可動ベースの上面によって支持される物体の境界を識別するように動作可能である、請求項1に記載のシステム。
- 前記物体が、手押し車、バスケット、ビン、又は車輪付き容器の形である、請求項2に記載のシステム。
- 前記第1のカメラは、前記物体上に配置されるバーコード又は識別子をスキャンするように動作可能である、請求項2に記載のシステム。
- 前記上部が、前記本体に対して約105度から約165度の角度で保持されている、請求項1に記載のシステム。
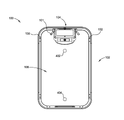
- 前記上部の前記第1側に対向する第2側に配置され、障害物を検出して回避するように動作可能である第2のカメラをさらに備える、請求項1に記載のシステム。
- 前記上部の前記第1側に対向する第2側に配置され、ターゲットを追跡するように動作可能である第2のカメラをさらに備える、請求項1に記載のシステム。
- 前記可動ベースの上面に配置され、前記上面によって支持される物体の存在を検出するように動作可能である1つ又は複数のセンサーをさらに備える、請求項1に記載のシステム。
- 前記1つ又は複数のセンサーが反射型光センサーである
請求項8に記載のシステム。 - 前記可動ベースの後側に配置され、アクチュエータによって可動ベースの高さを調整させるように操作可能である押しボタンをさらに備える
請求項1に記載のシステム。 - 電動ホイールを含む可動ベースを備える自動運転システムの、直立構成で自動運転システムの端部に結合されるコンソールに配置されるカメラを使用して、在庫ホルダーの境界を識別することと、
識別された前記境界の情報に基づいて、前記自動運転システムを前記在庫ホルダーとのドッキング位置に移動することと、
前記在庫ホルダーが前記自動運転システムに適切にドッキングされているかどうかを判定することと、
適切にドッキングされていると判定すると、前記可動ベースを上昇して前記在庫ホルダーの全部を持ち上げることと
を含む、自動運転システムを操作する方法。 - 前記在庫ホルダーに配置される在庫品目のバーコード又は識別子を前記カメラでスキャンすることをさらに含む、請求項11に記載の方法。
- 前記在庫ホルダーが前記自動運転システムに適切にドッキングされているかどうかを判定することは、前記自動運転システム上に配置される複数の近接センサーによって実行される、
請求項12に記載の方法。 - 前記自動運転システムの端部に配置される押しボタンを使用して、前記在庫ホルダーを持ち上げるように自動運転システムに通知することをさらに含む、請求項11に記載の方法。
- 物体を支持する支持面と、前記支持面の下に配置される電動ホイールとを備える可動ベースであって、前記支持面は前記可動ベースの第1の端部に配置される第1のセンサーと、前記可動ベースの前記第1の端部に対向する第2の端部に配置される第2のセンサーとを有する可動ベースと、
前記可動ベース内に配置されるアクチュエータと、
直立構成で前記可動ベースの前記第1の端部に結合されるコンソールと
を備え、
前記アクチュエータは、前記第1及び第2のセンサーが、非遮断から前記物体による遮断へ、又は前記遮断から非遮断への状態変化を検出すると、前記物体が全て持ち上がるように前記可動ベースの高さを調整するように動作可能である
自動運転システム。 - 前記1つ又は複数のセンサーが反射型光センサーである
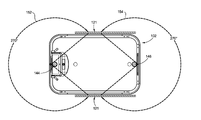
請求項15に記載のシステム。 - 第1のセンサー、第2のセンサー、物体を支持する支持面、及び前記支持面の下に配置される電動ホイールを含む可動ベースであって、前記第1のセンサーは前記可動ベースの第1側に配置され、前記第2のセンサーは、前記可動ベースの前記第1側に対向する第2側に配置され、前記第1及び第2のセンサーは、最大360度の視野をスキャンするように構成される可動ベースと、
前記可動ベース内に配置されるアクチュエータと、
直立構成で前記可動ベースの第1の端部に結合されるコンソールと
を備え、
前記アクチュエータは、前記第1及び第2のセンサーが、非遮断から前記物体による遮断へ、又は前記遮断から非遮断への状態変化を検出すると、前記物体の全部が持ち上がるように前記可動ベースの高さを調整するように動作可能である
自動運転システム。 - 物体を支持する支持面と、前記支持面の下に配置される電動ホイールとを備える可動ベースと、
前記可動ベース内に配置されるアクチュエータと、
直立構成で前記可動ベースの第1の端部に結合されるコンソールと、
前記可動ベースの長辺に配置される複数の近接センサーと
を備え、
前記アクチュエータは、前記可動ベースの長辺にある前記複数の近接センサーが、非遮断から前記物体による遮断へ、又は前記遮断から非遮断への状態変化を検出すると、前記物体の全部が持ち上がるように前記可動ベースの高さを調整するように動作可能である
自動運転システム。 - 第1のセンサー及び第2のセンサーを有して物体を支持する支持面と、前記支持面の下に配置される電動ホイールとを備える可動ベースと、
前記可動ベース内に配置されるアクチュエータと、
直立構成で前記可動ベースの第1の端部に結合されるコンソールと、
上面に配置される接触型センサーと
を備え、
前記アクチュエータは、前記接触型センサーが前記物体との接触を検出すると、前記物体の全部が持ち上がるように前記可動ベースの高さを調整するように動作可能である
自動運転システム。 - 前記接触型センサーが、前記上面の前記コンソールの近くの周辺に配置される、
請求項19に記載のシステム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2018/102640 WO2020041965A1 (en) | 2018-08-28 | 2018-08-28 | Self-driving systems with inventory holder |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022503595A JP2022503595A (ja) | 2022-01-12 |
| JP7202580B2 true JP7202580B2 (ja) | 2023-01-12 |
Family
ID=69642721
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021510304A Active JP7202580B2 (ja) | 2018-08-28 | 2018-08-28 | 在庫ホルダーを持つ自動運転システム |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US11097760B2 (ja) |
| EP (1) | EP3843583A4 (ja) |
| JP (1) | JP7202580B2 (ja) |
| CN (1) | CN113163918B (ja) |
| WO (1) | WO2020041965A1 (ja) |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11555576B2 (en) | 2014-12-24 | 2023-01-17 | Veltek Associates, Inc. | Stationary transfer platform and cleaning device for supply transport device |
| USD809730S1 (en) | 2015-12-22 | 2018-02-06 | Veltek Associates, Inc. | Cart |
| CN110945450B (zh) * | 2018-10-10 | 2022-04-05 | 灵动科技(北京)有限公司 | 人机交互自动导引车辆 |
| US11585934B2 (en) * | 2019-04-30 | 2023-02-21 | Lg Electronics Inc. | Cart robot having auto-follow function |
| US11511785B2 (en) * | 2019-04-30 | 2022-11-29 | Lg Electronics Inc. | Cart robot with automatic following function |
| US11232388B2 (en) * | 2019-11-22 | 2022-01-25 | Accenture Global Solutions Limited | Automated guided vehicle systems for retrieving hems |
| USD934933S1 (en) * | 2019-11-27 | 2021-11-02 | Lg Electronics Inc. | Delivery robot |
| USD934934S1 (en) * | 2019-11-27 | 2021-11-02 | Lg Electronics Inc. | Delivery robot |
| USD934932S1 (en) * | 2019-11-27 | 2021-11-02 | Lg Electronics Inc. | Delivery robot |
| CN111924269A (zh) * | 2020-07-30 | 2020-11-13 | 五邑大学 | 一种多功能智能跟随底盘 |
| US20220144609A1 (en) * | 2020-11-06 | 2022-05-12 | Kabushiki Kaisha Toshiba | Autonomous mobile robot, transporter, autonomous mobile robot control method, and transporter control method |
| JP7491823B2 (ja) * | 2020-12-04 | 2024-05-28 | 東芝テック株式会社 | カート |
| US12110050B2 (en) * | 2021-12-14 | 2024-10-08 | Fq Ip Ab | Navigator |
| JP1697344S (ja) * | 2021-02-04 | 2021-10-18 | ||
| JP7500484B2 (ja) * | 2021-03-22 | 2024-06-17 | 株式会社東芝 | 無人搬送車、無人搬送システム及び搬送プログラム |
| USD1104093S1 (en) * | 2021-04-19 | 2025-12-02 | Rapyuta Robotics Co., Ltd. | Retractable drawer for a robot |
| JP7524882B2 (ja) * | 2021-11-15 | 2024-07-30 | トヨタ自動車株式会社 | 制御システム、制御方法、及びプログラム |
| USD1006847S1 (en) * | 2021-11-17 | 2023-12-05 | Locus Robotics Corp. | Mobile robot base with mast |
| DK181139B1 (en) * | 2021-11-24 | 2023-02-21 | Bs Eng Aps | A towing device |
| USD1030833S1 (en) * | 2021-12-24 | 2024-06-11 | Lg Electronics Inc. | Delivery robot |
| CN114194311A (zh) * | 2021-12-30 | 2022-03-18 | 无锡黎曼机器人科技有限公司 | 一种高精度全向重载移动机器人 |
| JP7815902B2 (ja) * | 2022-03-22 | 2026-02-18 | 株式会社リコー | 自動搬送車 |
| US12227218B1 (en) * | 2022-03-28 | 2025-02-18 | Amazon Technologies, Inc. | Cart lift robotic transport |
| KR102411053B1 (ko) * | 2022-04-15 | 2022-06-22 | 주식회사 파이엇 | 복수개의 화물카트 연동 택배로봇과 택배방법 |
| JP1763041S (ja) * | 2022-04-29 | 2024-02-06 | 配送ロボット | |
| US20260042649A1 (en) | 2022-05-27 | 2026-02-12 | Fuji Corporation | Transport device and transport method |
| JP1731381S (ja) * | 2022-05-31 | 2022-12-06 | 無人搬送車 | |
| JP1731454S (ja) * | 2022-05-31 | 2022-12-06 | 無人搬送車 | |
| JP1731453S (ja) * | 2022-05-31 | 2022-12-06 | 無人搬送車 | |
| CA215098S (en) * | 2022-06-17 | 2024-03-04 | Rgt Inc | Serving robot |
| USD1018620S1 (en) * | 2022-08-02 | 2024-03-19 | John S Lee | Infinity smart serving robot |
| JP2024020701A (ja) * | 2022-08-02 | 2024-02-15 | 戸田建設株式会社 | 自動水平搬送装置、自動搬送システム及び自動搬送方法 |
| USD1067953S1 (en) | 2022-10-20 | 2025-03-25 | Hai Robotics Co., Ltd. | Transportation robot |
| US12543637B2 (en) * | 2022-10-25 | 2026-02-10 | Omar Alvarado | Universal remote control conversion kit |
| USD1070940S1 (en) * | 2022-11-09 | 2025-04-15 | Hai Robotics Co., Ltd. | Transportation robot |
| USD1016117S1 (en) * | 2022-11-29 | 2024-02-27 | Shenzhen Reeman Intelligent Equipment Co., Ltd. | Delivery robot |
| USD1025167S1 (en) * | 2022-12-02 | 2024-04-30 | Hyundai Motor Company | Transfer robot |
| USD1025168S1 (en) * | 2022-12-02 | 2024-04-30 | Hyundai Motor Company | Transfer robot |
| DE102022213405A1 (de) * | 2022-12-09 | 2024-06-20 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren und Vorrichtung zur Fernsteuerung eines Fahrzeugs |
| CN116409405A (zh) * | 2023-02-03 | 2023-07-11 | 中联重科股份有限公司 | 发动机分装生产系统及方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009080807A (ja) | 2007-09-12 | 2009-04-16 | Pepperl & Fuchs Gmbh | 車両の位置を決定する方法および装置、コンピュータプログラムおよびコンピュータプログラム製品 |
| JP2009298223A (ja) | 2008-06-11 | 2009-12-24 | Ihi Corp | 無人搬送車 |
| JP2012035077A (ja) | 2010-07-30 | 2012-02-23 | Toyota Motor Engineering & Manufacturing North America Inc | ロボット型搬送装置及びシステム |
| JP2015113230A (ja) | 2013-12-16 | 2015-06-22 | ニチユ三菱フォークリフト株式会社 | 無人フォークリフト |
| JP2018057846A (ja) | 2016-09-30 | 2018-04-12 | フォルヴェルク・ウント・ツェーオー、インターホールディング・ゲーエムベーハーVorwerk & Compagnie Interholding Gesellshaft Mit Beschrankter Haftung | 自律走行表面処理装置 |
| JP2018092527A (ja) | 2016-12-07 | 2018-06-14 | シャープ株式会社 | 自律走行装置、判定装置、自律走行装置における制御方法及び判定方法 |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07215695A (ja) | 1994-01-31 | 1995-08-15 | Meidensha Corp | フォークリフト形無人搬送車の走行制御装置 |
| US5992572A (en) * | 1995-10-05 | 1999-11-30 | Crown Equipment Corporation | Personnel carrying vehicle |
| BRPI0511407A (pt) * | 2004-05-03 | 2008-01-22 | Webb Int Co Jerwis B | sistema para carga automática de transporte utilizando o método de referência cruzada |
| CN101365614A (zh) * | 2004-05-21 | 2009-02-11 | 密尔沃基电动工具公司 | 工业推车 |
| CA2595210A1 (en) * | 2005-01-19 | 2006-08-10 | Multi-Shifter Inc. | Cart with lift and drive assist |
| KR20070030529A (ko) * | 2005-09-13 | 2007-03-16 | 삼성전자주식회사 | 자동 위치 보정 기능을 갖는 무인 반송차 및 위치 보정방법 |
| EA018548B1 (ru) * | 2006-08-04 | 2013-08-30 | Манус Фармасьютикалз (Канада) Лтд. | Полифункциональные биологически активные соединения |
| JP5105828B2 (ja) * | 2006-10-31 | 2012-12-26 | ヤマハモーターエンジニアリング株式会社 | 搬送車用駆動装置、およびこの駆動装置を備えた搬送装置 |
| US20120191272A1 (en) * | 2011-01-24 | 2012-07-26 | Sky-Trax, Inc. | Inferential load tracking |
| JP5798878B2 (ja) * | 2011-10-13 | 2015-10-21 | カヤバ工業株式会社 | 搬送台車 |
| ES2796798T3 (es) * | 2012-02-08 | 2020-11-30 | Humanscale Corp | Carrito auxiliar |
| CN102633077B (zh) * | 2012-04-15 | 2014-06-25 | 昆明新高原电子信息有限公司 | 一种基于自动搬运小车的可搬运式货架仓储系统 |
| US9376299B2 (en) * | 2013-01-09 | 2016-06-28 | Hyster-Yale Group, Inc. | Systems and methods for moving a pallet truck and raising a load |
| US9352745B1 (en) * | 2013-12-30 | 2016-05-31 | Daniel Theobald | Method and apparatus for transporting a payload |
| US9266624B2 (en) * | 2014-02-25 | 2016-02-23 | The Boeing Company | Systems and methods for movement of objects |
| FR3039104B1 (fr) * | 2015-07-22 | 2018-10-19 | Renault S.A.S | Vehicule automatique guide pour le deplacement multidirectionnel de charges |
| CN105077950B (zh) * | 2015-09-18 | 2017-08-15 | 中新智人(深圳)科技有限公司 | 一种跟随式行李保管机器人 |
| US20170220040A1 (en) * | 2016-02-02 | 2017-08-03 | Justin London | Smart luggage systems |
| WO2017210493A1 (en) * | 2016-06-02 | 2017-12-07 | C5 Enterprises, Llc | Attachable cart system and method |
| CN106002917A (zh) * | 2016-06-13 | 2016-10-12 | 刘哲 | 一种电杆式自动化仓储机器人 |
| CN106378620B (zh) * | 2016-10-14 | 2018-12-07 | 哈尔滨工业大学 | 基于气浮技术的模块式自动对接装配装置 |
| CN107065853B (zh) * | 2016-12-21 | 2020-02-14 | 深圳若步智能科技有限公司 | 一种物流机器人系统及其工作方法 |
| WO2018137047A1 (en) * | 2017-01-30 | 2018-08-02 | Clearpath Robotics, Inc. | Apparatus, systems, and methods for operating and maintaining electrically-powered material-transport vehicles |
| JP6848651B2 (ja) * | 2017-04-27 | 2021-03-24 | 株式会社明電舎 | 無人搬送車 |
| CN206760997U (zh) * | 2017-06-06 | 2017-12-19 | 何建慧 | 一种可拆装的自动跟随行李箱 |
| CN107487739B (zh) * | 2017-08-03 | 2019-03-19 | 河北工业大学 | 一种基于Mecanum轮的具有升降系统的AGV小车结构 |
| CN107423791A (zh) * | 2017-09-11 | 2017-12-01 | 重庆微标科技股份有限公司 | 行李拖车及其智能管理系统 |
| CN207370280U (zh) * | 2017-10-25 | 2018-05-18 | 江南大学 | 一种行李搬运机器人 |
| CN207374107U (zh) * | 2017-10-27 | 2018-05-18 | 灵动科技(北京)有限公司 | 基于万向轮的智能移动底盘和包括该底盘的智能移动装置 |
| CN207411723U (zh) * | 2017-11-16 | 2018-05-29 | 吴雨桐 | 一种可伸缩式自动行走行李箱底座 |
| CN107807652A (zh) * | 2017-12-08 | 2018-03-16 | 灵动科技(北京)有限公司 | 物流机器人、用于其的方法和控制器及计算机可读介质 |
| EP3817900A4 (en) * | 2018-07-05 | 2022-04-13 | Brain Corporation | SYSTEMS AND METHODS FOR OPERATING AUTONOMOUS TOWED PROBOTS |
| US11427121B2 (en) * | 2019-01-07 | 2022-08-30 | Walmart Apollo, Llc | Vehicle for container transport |
-
2018
- 2018-08-28 CN CN201880096701.6A patent/CN113163918B/zh active Active
- 2018-08-28 EP EP18931841.3A patent/EP3843583A4/en active Pending
- 2018-08-28 US US16/083,847 patent/US11097760B2/en active Active
- 2018-08-28 JP JP2021510304A patent/JP7202580B2/ja active Active
- 2018-08-28 WO PCT/CN2018/102640 patent/WO2020041965A1/en not_active Ceased
-
2021
- 2021-07-19 US US17/379,002 patent/US20210339782A1/en not_active Abandoned
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009080807A (ja) | 2007-09-12 | 2009-04-16 | Pepperl & Fuchs Gmbh | 車両の位置を決定する方法および装置、コンピュータプログラムおよびコンピュータプログラム製品 |
| JP2009298223A (ja) | 2008-06-11 | 2009-12-24 | Ihi Corp | 無人搬送車 |
| JP2012035077A (ja) | 2010-07-30 | 2012-02-23 | Toyota Motor Engineering & Manufacturing North America Inc | ロボット型搬送装置及びシステム |
| JP2015113230A (ja) | 2013-12-16 | 2015-06-22 | ニチユ三菱フォークリフト株式会社 | 無人フォークリフト |
| JP2018057846A (ja) | 2016-09-30 | 2018-04-12 | フォルヴェルク・ウント・ツェーオー、インターホールディング・ゲーエムベーハーVorwerk & Compagnie Interholding Gesellshaft Mit Beschrankter Haftung | 自律走行表面処理装置 |
| JP2018092527A (ja) | 2016-12-07 | 2018-06-14 | シャープ株式会社 | 自律走行装置、判定装置、自律走行装置における制御方法及び判定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022503595A (ja) | 2022-01-12 |
| EP3843583A4 (en) | 2022-03-30 |
| US20210339782A1 (en) | 2021-11-04 |
| EP3843583A1 (en) | 2021-07-07 |
| US11097760B2 (en) | 2021-08-24 |
| CN113163918B (zh) | 2023-03-28 |
| US20200307667A1 (en) | 2020-10-01 |
| CN113163918A (zh) | 2021-07-23 |
| WO2020041965A1 (en) | 2020-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7202580B2 (ja) | 在庫ホルダーを持つ自動運転システム | |
| JP7510942B2 (ja) | 自動運転車用自律放送システム | |
| CN109844674B (zh) | 具有可操控摄像机和指示器的物流机器人和运行方法 | |
| EP2797832B1 (en) | Auto-navigating vehicle with field-of-view enhancing sensor positioning and method of accomplishing same | |
| US9971351B2 (en) | Orientation device for electrically operated transportation vehicles, automatically guided in factory building | |
| JP7282345B2 (ja) | Rfidリーダと内蔵プリンタを備えた自己駆動システム | |
| KR102875183B1 (ko) | 토트 전달 구역, 자재 취급 차량, 운송기를 포함하는 다중 레벨 창고 랙 시스템을 포함하는 시스템, 및 그 사용 방법 | |
| AU2022386562A1 (en) | Adaptive mobile robot behavior based on payload | |
| US11215990B2 (en) | Manual direction control component for self-driving vehicle | |
| CN109571408B (zh) | 一种机器人、库存容器的角度校准方法及存储介质 | |
| JPWO2019069921A1 (ja) | 移動体 | |
| CN112639647B (zh) | 自动驾驶车辆管理系统和方法 | |
| JP2025113788A (ja) | 無人搬送車および無人搬送車の制御方法 | |
| HK40114557A (zh) | 用於物料搬运交通工具的负载搬运传感器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220510 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220801 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221216 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7202580 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |