JP7203052B2 - 医療補助デバイス - Google Patents
医療補助デバイス Download PDFInfo
- Publication number
- JP7203052B2 JP7203052B2 JP2019570288A JP2019570288A JP7203052B2 JP 7203052 B2 JP7203052 B2 JP 7203052B2 JP 2019570288 A JP2019570288 A JP 2019570288A JP 2019570288 A JP2019570288 A JP 2019570288A JP 7203052 B2 JP7203052 B2 JP 7203052B2
- Authority
- JP
- Japan
- Prior art keywords
- winding
- medical
- medical device
- support
- section
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004804 winding Methods 0.000 claims description 180
- 238000011282 treatment Methods 0.000 claims description 60
- 238000001514 detection method Methods 0.000 claims description 22
- 239000012530 fluid Substances 0.000 claims description 6
- 238000003825 pressing Methods 0.000 description 18
- 210000001367 artery Anatomy 0.000 description 15
- 230000002093 peripheral effect Effects 0.000 description 12
- 238000003384 imaging method Methods 0.000 description 10
- 230000007246 mechanism Effects 0.000 description 10
- 210000004204 blood vessel Anatomy 0.000 description 8
- 238000002583 angiography Methods 0.000 description 7
- 210000003141 lower extremity Anatomy 0.000 description 7
- 238000013459 approach Methods 0.000 description 6
- 238000003780 insertion Methods 0.000 description 5
- 230000037431 insertion Effects 0.000 description 5
- 239000002872 contrast media Substances 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 239000007789 gas Substances 0.000 description 4
- 238000009434 installation Methods 0.000 description 4
- 238000002608 intravascular ultrasound Methods 0.000 description 4
- 210000002414 leg Anatomy 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 238000013146 percutaneous coronary intervention Methods 0.000 description 4
- 239000002504 physiological saline solution Substances 0.000 description 4
- 239000003814 drug Substances 0.000 description 3
- 229940079593 drug Drugs 0.000 description 3
- 230000005611 electricity Effects 0.000 description 3
- 238000012277 endoscopic treatment Methods 0.000 description 3
- 210000001105 femoral artery Anatomy 0.000 description 3
- 230000037452 priming Effects 0.000 description 3
- 210000002321 radial artery Anatomy 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000000740 bleeding effect Effects 0.000 description 2
- 230000002612 cardiopulmonary effect Effects 0.000 description 2
- 238000007887 coronary angioplasty Methods 0.000 description 2
- 210000004351 coronary vessel Anatomy 0.000 description 2
- 238000003745 diagnosis Methods 0.000 description 2
- 238000002059 diagnostic imaging Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 230000003447 ipsilateral effect Effects 0.000 description 2
- 230000003902 lesion Effects 0.000 description 2
- 210000005259 peripheral blood Anatomy 0.000 description 2
- 239000011886 peripheral blood Substances 0.000 description 2
- 238000005086 pumping Methods 0.000 description 2
- 208000031481 Pathologic Constriction Diseases 0.000 description 1
- 244000208734 Pisonia aculeata Species 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 210000000709 aorta Anatomy 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 210000000013 bile duct Anatomy 0.000 description 1
- 230000017531 blood circulation Effects 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 210000002302 brachial artery Anatomy 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 229940039231 contrast media Drugs 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 210000003238 esophagus Anatomy 0.000 description 1
- 210000004013 groin Anatomy 0.000 description 1
- 239000001307 helium Substances 0.000 description 1
- 229910052734 helium Inorganic materials 0.000 description 1
- SWQJXJOGLNCZEY-UHFFFAOYSA-N helium atom Chemical compound [He] SWQJXJOGLNCZEY-UHFFFAOYSA-N 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000007888 peripheral angioplasty Methods 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 230000036262 stenosis Effects 0.000 description 1
- 208000037804 stenosis Diseases 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 210000003437 trachea Anatomy 0.000 description 1
- 210000001364 upper extremity Anatomy 0.000 description 1
- 210000000689 upper leg Anatomy 0.000 description 1
- 210000003708 urethra Anatomy 0.000 description 1
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0113—Mechanical advancing means, e.g. catheter dispensers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/09—Guide wires
- A61M25/09041—Mechanisms for insertion of guide wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M39/00—Tubes, tube connectors, tube couplings, valves, access sites or the like, specially adapted for medical use
- A61M39/08—Tubes; Storage means specially adapted therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/332—Force measuring means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3327—Measuring
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/007—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests for contrast media
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Hematology (AREA)
- Engineering & Computer Science (AREA)
- Anesthesiology (AREA)
- Biomedical Technology (AREA)
- Pulmonology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Biophysics (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
- Surgical Instruments (AREA)
Description
なお、以下に説明する実施形態は、本発明の好適な具体例であるから、技術的に好ましい種々の限定が付されているが、本発明の範囲は、以下の説明において特に本発明を限定する旨の記載がない限り、これらの態様に限られるものではない。また、各図面中、同様の構成要素には同一の符号を付して詳細な説明は適宜省略する。
図2は、本実施形態に係る医療補助デバイスが設置されたカテーテル室における処置中の状況を例示する斜視図である。
図5は、本実施形態に係る医療補助デバイスの内部構造を表す断面図である。
なお、図4は、他の医療用デバイス53(例えば、ガイドワイヤ)が、導入部413を通して医療用デバイス51(例えば、カテーテル)に挿入された状態を表している。
支持体41は、医療補助デバイス4の本体として設けられ、支持軸411を有する。図3~図5に表した支持体41は、内部空間が設けられたハウジングの構造を有する。ただし、本実施形態の支持体41は、内部空間を有することには限定されず、巻き取り部42を回転可能に支持する限りにおいて、巻き取り部42を支持体41の外部に露出させていてもよい。支持体41は、開口部412を有する。接続部43は、支持体41の開口部412を通して支持体41の外部に配置されている。なお、巻き取り部42の大部分が支持体41の外部に露出している場合には、支持体41は、必ずしも開口部412を有していなくともよい。
図1に表したように、術者32等は、医療用デバイス51の基端部を医療用デバイスホルダ52から抜き出し、医療補助デバイス4の接続部43に接続する。そして、術者32等は、巻き取り部42の把持部421を把持し、図3に表した矢印A1の方向に巻き取り部42を回転させる。そうすると、接続部43が巻き取り部42の外周部に沿って巻き取り部42とともに回転する。これにより、図5に表した二点鎖線の医療用デバイス51のように、医療用デバイス51は、医療用デバイスホルダ52から抜き出されるとともに、巻き取り部42の外周部に巻き取られる。術者32等は、接続部43に接続された医療用デバイス51を使用するときには、医療用デバイス51を引っ張ることにより、医療用デバイス51を支持体41から繰り出すことができる。
なお、本変形例に係る医療補助デバイス4Aの構成要素が、図3~図5に関して前述した本実施形態に係る医療補助デバイス4の構成要素と同様である場合には、重複する説明は適宜省略し、以下、相違点を中心に説明する。
なお、図6は、巻き取り部のロックが設定された状態を表す断面図である。図7は、巻き取り部のロックが解除された状態を表す断面図である。
図1に表したように、術者32等は、医療用デバイス51の基端部を医療用デバイスホルダ52から抜き出し、医療補助デバイス4の接続部43に接続する。そして、術者32等が操作部451を図7に表した矢印A3の方向に押すと、巻き取り部42は、付勢手段44から与えられた付勢力により図7に表した矢印A5の方向に回転する。これにより、医療用デバイス51は、医療用デバイスホルダ52から抜き出されるとともに、巻き取り部42の外周部に巻き取られる(図5参照)。術者32等が操作部451を押す力を解除すると、ローラ452が押さえ部453と巻き取り部42の外周部との間に挟まることにより、巻き取り部42のロックが設定される。
なお、第2実施形態に係る医療補助デバイス4Bの構成要素が、図3~図5に関して前述した第1実施形態に係る医療補助デバイス4の構成要素、ならびに図6および図7に関した変形例に係る医療補助デバイス4Aの構成要素と同様である場合には、重複する説明は適宜省略し、以下、相違点を中心に説明する。
本実施形態に係る医療補助デバイス4Bは、支持体41と、巻き取り部42と、接続部43と、第1回転駆動部461と、回転検出部462と、制御部463と、第2回転駆動部464と、を備える。図3~図5に関して前述した把持部421は、設けられていてもよく、設けられていなくともよい。図8に表した例では、把持部421は、設けられていない。
なお、第3実施形態に係る医療補助デバイス4Cの構成要素が、図3~図5に関して前述した第1実施形態に係る医療補助デバイス4の構成要素、および図8に関して前述した第2実施形態に係る医療補助デバイス4Bの構成要素と同様である場合には、重複する説明は適宜省略し、以下、相違点を中心に説明する。
本実施形態に係る医療補助デバイス4Cは、支持体41Cと、2つの巻き取り部42と、2つの接続部43と、2つの第1回転駆動部461と、2つの回転検出部462と、制御部463と、2つの第2回転駆動部464と、を備える。2つの巻き取り部42は、互いに独立して回転することができる。例えば、2つの巻き取り部42は、互いに同軸上に配置された2つの支持軸411を中心として支持体41Cに対して回転可能に設けられている。あるいは、例えば、2つの巻き取り部42は、2つの巻き取り部42に共通する1つの支持軸411を中心として支持体41Cに対して回転可能に設けられていてもよい。
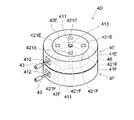
なお、第4実施形態に係る医療補助デバイスDの構成要素が、図3~図5に関して前述した第1実施形態に係る医療補助デバイス4の構成要素、図8に関して前述した第2実施形態に係る医療補助デバイス4Bの構成要素、および図9に関して前述した第3実施形態に係る医療補助デバイス4Cの構成要素と同様である場合には、重複する説明は適宜省略し、以下、相違点を中心に説明する。
本実施形態に係る医療補助デバイス4Dは、複数の医療補助デバイスが積層され互いに結合された構造を有する。図9に表した例では、2つの医療補助デバイス4E、4Fが、支持軸411の軸方向に沿って積層され互いに結合されている。2つの医療補助デバイス4E、4Fは、互いに着脱可能とされている。なお、本実施形態では、積層される医療補助デバイスの数は、2つには限定されず、3つ以上であってもよい。
Claims (5)
- 生体管腔内に挿入され前記生体管腔内の処置に用いられる医療用デバイスに接続される医療補助デバイスであって、
支持体と、
前記支持体に対して支持軸を中心として回転可能に設けられ前記医療用デバイスを巻き取る巻き取り部と、
前記巻き取り部に設けられ前記医療用デバイスの端部に接続される接続部と、
前記支持体に設けられ、電圧が供給されると前記巻き取り部を回転させる回転力を発生する回転駆動部と、
前記巻き取り部の回転角を検出する回転検出部と、
前記回転検出部から送信された信号を受信し、前記回転検出部により検出された前記回転角に基づいて前記医療用デバイスが所定位置から巻き取られた長さおよび繰り出された長さを算出する制御部と、
を備えたことを特徴とする医療補助デバイス。 - 前記制御部は、前記回転検出部により検出された前記回転角に基づいて、前記医療用デバイスが繰り出される方向の力を検出すると前記回転駆動部を制御して前記医療用デバイスを繰り出し、前記医療用デバイスが巻き取られる方向の力を検出すると前記回転駆動部を制御して前記医療用デバイスを巻き取ることを特徴とする請求項1に記載の医療補助デバイス。
- 前記巻き取り部を回転させる回転力は、第1回転力であり、
前記第1回転力を発生する前記回転駆動部は、第1回転駆動部であり、
前記接続部に接続される前記医療用デバイスの軸の中心として前記医療用デバイスを回転させる第2回転力を発生する第2回転駆動部をさらに備えたことを特徴とする請求項1または2に記載の医療補助デバイス。 - 前記支持体および前記巻き取り部の少なくともいずれかは、前記接続部と空間的に接続された導入部であって前記医療用デバイスとは異なる他の医療用デバイスが挿入されるまたは前記処置の際に使用される作動流体が送り込まれる導入部を有することを特徴とする請求項1~3のいずれか1項に記載の医療補助デバイス。
- 生体管腔内に挿入され前記生体管腔内の処置に用いられるカテーテルに接続される医療補助デバイスであって、
支持体と、
前記支持体に対して支持軸を中心として回転可能に設けられ前記カテーテルを巻き取る巻き取り部と、
前記巻き取り部に設けられ前記カテーテルの端部に接続される接続部と、
を備え、
前記支持体および前記巻き取り部の少なくともいずれかは、前記接続部と空間的に接続された導入部であって前記カテーテルとは異なる他のカテーテルが挿入されるまたは前記処置の際に使用される作動流体またはガイドワイヤが送り込まれる導入部を有し、
前記導入部は、医療用補助デバイスの外面に設けられたことを特徴とする医療補助デバイス。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018020553 | 2018-02-07 | ||
| JP2018020553 | 2018-02-07 | ||
| PCT/JP2018/034993 WO2019155676A1 (ja) | 2018-02-07 | 2018-09-21 | 医療補助デバイス |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2019155676A1 JPWO2019155676A1 (ja) | 2021-01-28 |
| JP7203052B2 true JP7203052B2 (ja) | 2023-01-12 |
Family
ID=67548357
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019570288A Active JP7203052B2 (ja) | 2018-02-07 | 2018-09-21 | 医療補助デバイス |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11529496B2 (ja) |
| EP (1) | EP3682933B1 (ja) |
| JP (1) | JP7203052B2 (ja) |
| CN (1) | CN111542366B (ja) |
| WO (1) | WO2019155676A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12226595B2 (en) * | 2018-04-20 | 2025-02-18 | Becton, Dickinson And Company | Instrument delivery device having a rotary element |
| US12496433B2 (en) * | 2019-10-03 | 2025-12-16 | Ramot Biomedical Engineering Ltd. | Catheter fixation device |
| JP7393910B2 (ja) * | 2019-10-17 | 2023-12-07 | テルモ株式会社 | 医療用長尺体巻取装置 |
| CN117899301B (zh) * | 2024-03-20 | 2024-06-04 | 杭州坦帕医疗科技有限公司 | 一种自适应输液港 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005514095A (ja) | 2001-12-28 | 2005-05-19 | メドトロニック ミニメド インコーポレイテッド | 可変長可撓性導通路フィーダ |
| WO2008074039A1 (de) | 2006-12-20 | 2008-06-26 | Ami Agency For Medical Innovations Gmbh | Infusionsport mit aufwickelbarem schlauch |
| JP2016510606A (ja) | 2013-03-07 | 2016-04-11 | ロボカツRobocath | 特に細長いフレキシブルな医療用部品をガイドするための医療用ロボット |
| US20160136391A1 (en) | 2013-07-23 | 2016-05-19 | Hollister Incorporated | Urinary Catheter Deployment Cassettes |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3995628A (en) * | 1975-04-25 | 1976-12-07 | Travenol Laboratories, Inc. | Catheter insertion device |
| JPS63162495A (ja) * | 1986-12-24 | 1988-07-06 | 株式会社 富永製作所 | 給油装置 |
| JP2517982Y2 (ja) * | 1993-04-06 | 1996-11-20 | 富士システムズ株式会社 | カテーテルの巻取収納装置 |
| US20040051019A1 (en) * | 2002-09-02 | 2004-03-18 | Mogensen Lasse Wesseltoft | Apparatus for and a method of adjusting the length of an infusion tube |
| DK1556124T3 (da) * | 2002-09-02 | 2008-02-18 | Unomedical As | Apparatur og fremgangsmåde til justering af en infusionsslanges længde |
| JP2005319083A (ja) | 2004-05-10 | 2005-11-17 | Olympus Corp | 内視鏡用処置具の巻き取りリール及び内視鏡用処置具並びに内視鏡用処置具システム |
| IL162318A (en) * | 2004-06-03 | 2011-07-31 | Tal Wenderow | Transmission for a remote catheterization system |
| US20110028941A1 (en) * | 2008-04-10 | 2011-02-03 | Yoshitaka Nagano | Linear object manipulation control device for controlling manipulation of linear object by operator |
| US8191551B2 (en) * | 2009-07-17 | 2012-06-05 | Joan Skovgard | Oxygen delivery system |
| EP2386327A1 (en) * | 2010-05-12 | 2011-11-16 | F. Hoffmann-La Roche AG | Device for adjusting the length of infusion tubing |
| EP2623151A4 (en) * | 2010-09-28 | 2014-04-16 | Terumo Corp | INTRODUCER SHEATH, PLACEMENT DEVICE FOR BLOOD VESSEL TREATMENT INSTRUMENT, AND INTRODUCER SHEATH SHORTENING METHOD |
| CN104302350B (zh) * | 2012-03-07 | 2018-09-07 | 德卡产品有限公司 | 输液泵组件 |
| CN106999699B (zh) * | 2014-12-26 | 2020-10-30 | 泰尔茂株式会社 | 收纳器具 |
| JP6706480B2 (ja) * | 2015-10-22 | 2020-06-10 | カナエ工業株式会社 | 輸液チューブの巻取装置及び輸液装置 |
| CN206597189U (zh) * | 2015-12-04 | 2017-10-31 | 中国人民解放军第二军医大学 | 一种输液架 |
-
2018
- 2018-09-21 CN CN201880085041.1A patent/CN111542366B/zh active Active
- 2018-09-21 EP EP18904745.9A patent/EP3682933B1/en active Active
- 2018-09-21 JP JP2019570288A patent/JP7203052B2/ja active Active
- 2018-09-21 WO PCT/JP2018/034993 patent/WO2019155676A1/ja not_active Ceased
-
2020
- 2020-07-27 US US16/939,365 patent/US11529496B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005514095A (ja) | 2001-12-28 | 2005-05-19 | メドトロニック ミニメド インコーポレイテッド | 可変長可撓性導通路フィーダ |
| WO2008074039A1 (de) | 2006-12-20 | 2008-06-26 | Ami Agency For Medical Innovations Gmbh | Infusionsport mit aufwickelbarem schlauch |
| JP2016510606A (ja) | 2013-03-07 | 2016-04-11 | ロボカツRobocath | 特に細長いフレキシブルな医療用部品をガイドするための医療用ロボット |
| US20160136391A1 (en) | 2013-07-23 | 2016-05-19 | Hollister Incorporated | Urinary Catheter Deployment Cassettes |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3682933A4 (en) | 2020-12-02 |
| CN111542366B (zh) | 2023-05-16 |
| JPWO2019155676A1 (ja) | 2021-01-28 |
| WO2019155676A1 (ja) | 2019-08-15 |
| EP3682933B1 (en) | 2022-06-29 |
| US11529496B2 (en) | 2022-12-20 |
| EP3682933A1 (en) | 2020-07-22 |
| CN111542366A (zh) | 2020-08-14 |
| US20200353214A1 (en) | 2020-11-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7203053B2 (ja) | 医療補助デバイス | |
| JP7159393B2 (ja) | ガイドカルーテル制御用のシステム | |
| JP7203052B2 (ja) | 医療補助デバイス | |
| JP6949898B2 (ja) | 止血弁を制御するシステム | |
| US12376820B2 (en) | Integrated imaging and device deployment platform | |
| US7060033B2 (en) | Ultrasound imaging guidewire with static central core and tip | |
| JP7528110B2 (ja) | 医療器具セット及び管状部材 | |
| JP2004097286A (ja) | カテーテル | |
| JP2002513607A (ja) | 超音波画像システムのための、組み合わされたモータドライブと長手方向位置自動並進器 | |
| CN110916746A (zh) | 一种推送装置及介入输送系统 | |
| JP4312009B2 (ja) | カテーテル | |
| JP6826847B2 (ja) | 医療用デバイス | |
| CN112107337A (zh) | 导丝输送机构 | |
| WO2026024691A1 (en) | Fixed mechanical catheter steering system | |
| JP2018042823A (ja) | 医療用デバイス | |
| JP2018102608A (ja) | 医療デバイスおよび処置方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210610 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220511 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220711 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220905 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221226 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7203052 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |