JP7208480B2 - 学習プログラム、検出プログラム、学習装置、検出装置、学習方法および検出方法 - Google Patents
学習プログラム、検出プログラム、学習装置、検出装置、学習方法および検出方法 Download PDFInfo
- Publication number
- JP7208480B2 JP7208480B2 JP2018193387A JP2018193387A JP7208480B2 JP 7208480 B2 JP7208480 B2 JP 7208480B2 JP 2018193387 A JP2018193387 A JP 2018193387A JP 2018193387 A JP2018193387 A JP 2018193387A JP 7208480 B2 JP7208480 B2 JP 7208480B2
- Authority
- JP
- Japan
- Prior art keywords
- feature
- image
- model
- class
- learning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
- G06F18/214—Generating training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
- G06F18/243—Classification techniques relating to the number of classes
- G06F18/2431—Multiple classes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
- G06N3/0455—Auto-encoder networks; Encoder-decoder networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/0464—Convolutional networks [CNN, ConvNet]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G06N3/09—Supervised learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/776—Validation; Performance evaluation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/69—Microscopic objects, e.g. biological cells or cellular parts
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Evolutionary Computation (AREA)
- General Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Software Systems (AREA)
- Life Sciences & Earth Sciences (AREA)
- Computing Systems (AREA)
- Data Mining & Analysis (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- General Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Biophysics (AREA)
- Computational Linguistics (AREA)
- Mathematical Physics (AREA)
- Medical Informatics (AREA)
- Databases & Information Systems (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- Image Analysis (AREA)
Description
[第1の実施の形態]
第1の実施の形態を説明する。
第1の実施の形態の学習装置10は、入力された画像から物体が写った領域および当該物体が属するクラスを判定するための検出モデル13を生成する。生成された検出モデル13を利用して領域およびクラスを判定する画像認識は、学習装置10が行ってもよいし他の装置が行ってもよい。学習装置10は、情報処理装置またはコンピュータと言うこともできる。学習装置10は、クライアント装置でもよいしサーバ装置でもよい。
記憶部11は、RAM(Random Access Memory)などの揮発性の半導体メモリでもよいし、HDD(Hard Disk Drive)やフラッシュメモリなどの不揮発性ストレージでもよい。処理部12は、例えば、CPU(Central Processing Unit)、MPU(Micro Processing Unit)、GPU(Graphics Processing Unit)、DSP(Digital Signal Processor)などのプロセッサである。ただし、処理部12は、ASIC(Application Specific Integrated Circuit)やFPGA(Field Programmable Gate Array)などの特定用途の電子回路を含んでもよい。プロセッサは、RAMなどのメモリ(記憶部11でもよい)に記憶されたプログラムを実行する。プログラムには学習プログラムが含まれる。複数のプロセッサの集合を「マルチプロセッサ」または単に「プロセッサ」と言うことがある。
次に、第2の実施の形態を説明する。
図2は、第2の実施の形態の検出装置の例を説明する図である。
検出モデル23は、入力された画像から物体が写った領域および複数のクラスのうち当該物体が属するクラスを判定する。検出モデル23は、機械学習によって生成され得る。例えば、検出モデル23は、ディープラーニングによって生成される多層ニューラルネットワークである。複数のクラスは、入力された画像の中から検出したい物体の種類を示す。医療画像から細胞組織の状態を判定する医療画像診断においては、複数のクラスは陰性や陽性など細胞組織の状態を示す。第2の実施の形態の検出装置20は、クラス間の物体の形状や模様が近似しており、クラス数が少ない画像認識に好適である。例えば、第2の実施の形態の検出装置20は、腎生検などの医療画像診断に好適である。
次に、第3の実施の形態を説明する。
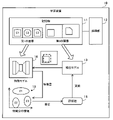
図3は、機械学習装置のハードウェア例を示すブロック図である。
図4は、学習および検出の第1の例を示す図である。
ここでは、クラスC1,C2,C3の何れかのクラスに属する物体が写った領域を画像から検出し、当該物体のクラスを判定することを考える。
小画像33は、検出モデルを学習する際に使用する訓練データに含まれる1つの画像である。上記のように、検出モデルの学習では、位置誤差と信頼度誤差の合計が低下するように検出モデルが更新される。このとき、位置誤差は十分に低下していないものの信頼度誤差が大きく低下することで、合計の誤差が小さくなり検出モデルの学習が収束してしまうことがある。これは、訓練データに過度に依存する過学習によって、本来不要な背景の模様などの情報も検出モデルに取り込んでしまうことで発生し得る。
図6は、訓練データ生成の例を示す図である。
機械学習装置100は、検出モデルを学習する前に特徴モデルを学習する。特徴モデルは、入力される小画像の特徴量を算出するための多層ニューラルネットワークである。第3の実施の形態の特徴モデルが算出する特徴量は、物体が写った領域を切り出す際の位置ずれに対して鋭敏に反応する。異なるクラスに属する物体が写った小画像からは、大きく異なる特徴量が算出される。また、位置ずれによって背景の模様などを多く含む小画像からは、正しく切り出された小画像とは大きく異なる特徴量が算出される。この特徴量を用いることで、検出モデルの学習の中に位置ずれの評価を組み込むことができる。
図7は、オートエンコーダの例を示す図である。
オートエンコーダ50は、多層ニューラルネットワークである。オートエンコーダ50は、ニューロンに相当する複数のノードと、シナプスに相当するノード間のエッジとを含む。隣接する層のノードがシナプスで結合される。シナプスには重みが割り当てられ、前の層のノードの値に重みをかけて次の層のノードの値が算出される。オートエンコーダ50の学習を通じてシナプスの重みが決定される。
入力層51は、小画像が入力される層であり複数のノードを含む。中間層52は、入力層51の次の層であり入力層51より少ないノードを含む。すなわち、中間層52は入力層51より次元数が少ない。中間層53は、中間層52の次の層であり中間層52より少ないノードを含む。中間層53はオートエンコーダ50の中で最も次元数が少ない。中間層54は、中間層53の次の層であり中間層53より多いノードを含む。出力層55は、小画像を出力する層であり中間層54より多いノードを含む。入力層51の次元数と出力層55の次元数が同じであってもよい。
図8は、特徴空間の例を示す図である。
機械学習装置100は、検出モデルの1回の更新につき、数式(1)の誤差Lossを1回算出する。誤差Lossが小さくなるように、次回の検出モデルの更新が行われる。数式(1)において、Bは検出モデルに入力した小画像の数である。機械学習装置100は、入力した各小画像に対して位置誤差Lrecと信頼度誤差Lconfと誤差修正量Lmodを算出する。位置誤差Lrecと信頼度誤差Lconfと誤差修正量Lmodの合計が当該小画像に対する誤差であり、複数の小画像の誤差の平均が誤差Lossである。検出モデルは、1つの小画像から複数の候補領域を検出することがある。その場合には、機械学習装置100は、複数の候補領域それぞれの位置誤差と信頼度誤差と誤差修正量を算出し、その平均を当該小画像に対する位置誤差Lrecと信頼度誤差Lconfと誤差修正量Lmodとする。





図9は、予測信頼度と特徴信頼度と誤差修正量の関係の第1の例を示す図である。
小画像71にはクラスC3に属する1つの物体が写っている。検出モデルの学習中に、小画像71が検出モデルに入力され、正解領域から若干ずれた候補領域が検出されたとする。ただし、小画像71に対する過学習によって、クラスC1,C2の予測信頼度が非常に低くクラスC3の予測信頼度が非常に高い予測信頼度ベクトル72が算出されたとする。この場合、位置誤差Lrecの低下が不十分であるものの信頼度誤差Lconfが極端に低下している。もし誤差Lossを位置誤差Lrecと信頼度誤差Lconfのみから算出した場合、誤差Lossが許容可能な水準まで低下していることになる。よって、位置ずれによる誤ったクラス分類が発生しやすい検出モデルが生成されてしまうおそれがある。
小画像81にはクラスC3に属する1つの物体が写っている。検出モデルの学習中に、小画像81が検出モデルに入力され、正解領域から若干ずれた候補領域が検出されたとする。また、クラスC3の予測信頼度が最も高いものの非常に高いとまでは言えず、クラスC1,C2の予測信頼度も非常に低いとは言えない予測信頼度ベクトル82が算出されたとする。すなわち、位置誤差Lrecと信頼度誤差Lconfの何れか一方が極端に低下するのではなく、両者がバランスよく低下するように検出モデルの学習が進行している。
検出モデルのテストには、訓練データとは異なる画像を使用する。例えば、テスト用画像として腎臓組織画像91が用意される。腎臓組織画像91には、異なるクラスに分類される複数の糸球体が写っている。腎臓組織画像91には、正解領域および正解クラスを示す教師情報は付加されていなくてよい。機械学習装置100は、腎臓組織画像91をスキャンすることで、検出モデルの入力サイズに対応する複数の小画像を生成する。例えば、腎臓組織画像91から、小画像92a,92bなどの小画像が生成される。機械学習装置100は、小画像の間で領域が重複しないように腎臓組織画像91を分割してもよいし、小画像の間で部分的に領域が重複するように複数の小画像を生成してもよい。
図12は、機械学習装置の機能例を示すブロック図である。
機械学習装置100は、画像記憶部121、検出モデル記憶部122および特徴モデル記憶部123を有する。また、機械学習装置100は、訓練データ生成部131、特徴モデル学習部132、検出モデル学習部133、誤差算出部134、テストデータ生成部135、物体検出部136、信頼度修正部137および検出結果出力部138を有する。
画像情報テーブル141は、画像記憶部121に記憶される。画像情報テーブル141は、画像ID、物体ID、位置およびクラスの項目を含む。画像IDは、学習用画像を識別する識別子である。物体IDは、学習用画像に写った糸球体を識別する識別子である。位置は、糸球体が写った正解領域の位置であり、左上のX座標とY座標、幅および高さによって表現される。クラスは、糸球体の状態を示す正解クラスである。画像情報テーブル141の情報は、学習用画像に付加された教師情報である。
訓練データテーブル142は、訓練データ生成部131が生成し、特徴モデル学習部132が使用するものである。訓練データテーブル142は、特徴モデルの学習用の訓練データに関する情報を記録する。訓練データテーブル142は、小画像ID、物体ID、クラスおよび特徴量の項目を含む。小画像IDは、学習用画像から抽出された小画像を識別する識別子である。物体IDは、画像情報テーブル141の物体IDに相当する。クラスは、画像情報テーブル141のクラスに相当する。特徴量は、小画像から特徴モデルによって算出された特徴量である。小画像ID、物体IDおよびクラスは、訓練データ生成部131が記録する。特徴量は、特徴モデル学習部132が記録する。
訓練データテーブル144は、訓練データ生成部131が生成し、誤差算出部134が使用するものである。訓練データテーブル144は、検出モデルの学習用の訓練データに関する情報を記録する。訓練データテーブル144は、小画像ID、物体ID、位置およびクラスの項目を含む。小画像IDは、学習用画像から抽出された小画像を識別する識別子である。物体IDは、画像情報テーブル141の物体IDに相当する。位置は、正解領域の位置であり、左上のX座標とY座標、幅および高さによって表現される。訓練データテーブル144の位置は、データ拡張に合わせて画像情報テーブル141の位置から修正されている。クラスは、画像情報テーブル141のクラスに相当する。
テストデータテーブル146は、テストデータ生成部135が生成するものであ。テストデータテーブル146は、テストデータを管理する。テストデータテーブル146は、小画像IDおよび画像IDの項目を含む。小画像IDは、テスト用画像から抽出された小画像を識別する識別子である。画像IDは、テスト用画像を識別する識別子である。
図17は、特徴モデル学習の手順例を示すフローチャートである。
(S10)特徴モデル学習部132は、特徴モデルのシナプスの重みを初期化する。シナプスの重みの初期値はランダムに決めてよい。
(S12)特徴モデル学習部132は、訓練データに含まれる複数の小画像に対して特徴モデルがオートエンコーダとして機能するように、特徴モデルを学習する。これにより、特徴モデルのシナプスの重みが決定される。
図18は、検出モデル学習の手順例を示すフローチャートである。
(S21)誤差算出部134は、特徴モデルを示すシナプスの重みと、特徴空間を示す特徴量の平均および分散を、特徴モデル記憶部123から読み込む。
(S23)検出モデル学習部133は、訓練データに含まれる小画像を1つずつ検出モデルに入力して、候補領域の位置および予測信頼度ベクトルを算出する。
(S26)誤差算出部134は、ステップS25で切り出した小画像を特徴モデルに入力し、特徴モデルによって特徴量を算出する。
図19は、検出モデルテストの手順例を示すフローチャートである。
(S42)物体検出部136は、テストデータに含まれる小画像を1つずつ検出モデルに入力して、候補領域の位置および予測信頼度ベクトルを算出する。
(S44)信頼度修正部137は、ステップS43で切り出した小画像を特徴モデルに入力し、特徴モデルによって特徴量を算出する。
(S47)検出結果出力部138は、候補領域毎に、修正後の予測信頼度ベクトルの中の最大の予測信頼度と閾値とを比較する。検出結果出力部138は、最大の予測信頼度が閾値を超える候補領域を、検出された領域として選択する。ただし、2以上の候補領域が重なっている場合には、検出結果出力部138は、それら2以上の候補領域のうち予測信頼度が最も大きい候補領域のみを選択して領域間の重なりを解消する。また、検出結果出力部138は、候補領域毎に、最大の予測信頼度をもつクラスを判定する。これにより、検出された領域および当該領域のクラス分類が確定する。
(S49)検出結果出力部138は、領域の外枠である検出枠が記載された画像を、ディスプレイ104aに表示させる。
11,21 記憶部
12,22 処理部
13,23 検出モデル
14,24 特徴モデル
15,25 特徴分布情報
16 評価値
20 検出装置
26 対象画像
26a,26b 領域
27a,27b 信頼度
Claims (10)
- コンピュータに、
複数のクラスのうち何れか1つのクラスに属する物体がそれぞれ写った画像であって、物体が写った領域および当該物体が属するクラスを示す教師情報が付加された第3の画像から、前記教師情報が示す領域を切り出すことで生成された複数の第1の画像を用いて、入力された画像の特徴量を算出する特徴モデルを学習し、
前記特徴モデルを用いて、前記複数の第1の画像それぞれに対する第1の特徴量を算出し、前記複数のクラスと前記第1の特徴量との間の関係を示す特徴分布情報を生成し、
複数の第2の画像を用いて、入力された画像から物体が写った領域および当該物体が属するクラスを判定する検出モデルを学習する際に、前記特徴モデルを用いて、前記検出モデルにより前記複数の第2の画像の中から判定された領域に対する第2の特徴量を算出し、前記特徴分布情報および前記第2の特徴量を用いて、前記検出モデルのクラスの判定精度を示す評価値を修正し、前記修正した評価値に基づいて前記検出モデルを更新する、
処理を実行させる学習プログラム。 - 前記特徴モデルは、複数のノードを含む入力層と、複数のノードを含む出力層と、前記入力層および前記出力層よりノードが少ない中間層とを有するオートエンコーダであり、
前記特徴モデルが算出する特徴量は、前記中間層で算出されるベクトルである、
請求項1記載の学習プログラム。 - 前記評価値の修正では、前記第2の特徴量と前記検出モデルにより判定されたクラスに対応する前記第1の特徴量との間の距離を算出し、前記算出した距離が大きいほど前記判定精度の評価が低下するように前記評価値を修正する、
請求項1記載の学習プログラム。 - 前記評価値の修正では、前記第2の特徴量と前記複数のクラスそれぞれに対応する前記第1の特徴量との間の距離を示す距離分布を算出し、前記距離分布と前記複数の第2の画像に付加された教師情報が示す正解クラスとの間の差異を示す第1の修正項目と、前記距離分布と前記検出モデルによるクラスの判定結果との間の差異を示す第2の修正項目とに基づいて、前記評価値を修正する、
請求項1記載の学習プログラム。 - 前記評価値の修正では、前記検出モデルの学習の進行に応じて、前記第1の修正項目の重みを段階的に小さくし、前記第2の修正項目の重みを段階的に大きくする、
請求項4記載の学習プログラム。 - コンピュータに、
入力された画像から物体が写った領域および当該物体が属するクラスを判定する検出モデルと、入力された画像の特徴量を算出するモデルであって、複数のクラスのうち何れか1つのクラスに属する物体が写った領域および当該物体が属するクラスを示す教師情報が付加された第3の画像から、前記教師情報が示す領域を切り出すことで生成された複数の第1の画像を用いて学習された特徴モデルと、前記複数のクラスと前記特徴モデルにより前記複数の第1の画像それぞれから算出される第1の特徴量との間の関係を示す特徴分布情報とを取得し、
前記検出モデルを用いて、第2の画像の中から異なる複数の領域を判定し、前記複数の領域それぞれにおけるクラスの判定結果の信頼度を算出し、
前記複数の領域それぞれについて、前記特徴モデルを用いて当該領域に対する第2の特徴量を算出し、前記特徴分布情報および前記算出した第2の特徴量を用いて前記信頼度を修正し、
前記修正した信頼度に基づいて、前記複数の領域のうち1以上の領域を選択する、
処理を実行させる検出プログラム。 - 複数のクラスのうち何れか1つのクラスに属する物体がそれぞれ写った画像であって、物体が写った領域および当該物体が属するクラスを示す教師情報が付加された第3の画像から、前記教師情報が示す領域を切り出すことで生成された複数の第1の画像と、複数の第2の画像とを記憶する記憶部と、
前記複数の第1の画像を用いて、入力された画像の特徴量を算出する特徴モデルを学習し、前記特徴モデルを用いて、前記複数の第1の画像それぞれに対する第1の特徴量を算出し、前記複数のクラスと前記第1の特徴量との間の関係を示す特徴分布情報を生成し、前記複数の第2の画像を用いて、入力された画像から物体が写った領域および当該物体が属するクラスを判定する検出モデルを学習する際に、前記特徴モデルを用いて、前記検出モデルにより前記複数の第2の画像の中から判定された領域に対する第2の特徴量を算出し、前記特徴分布情報および前記第2の特徴量を用いて、前記検出モデルのクラスの判定精度を示す評価値を修正し、前記修正した評価値に基づいて前記検出モデルを更新する処理部と、
を有する学習装置。 - 入力された画像から物体が写った領域および当該物体が属するクラスを判定する検出モデルと、入力された画像の特徴量を算出するモデルであって、複数のクラスのうち何れか1つのクラスに属する物体が写った領域および当該物体が属するクラスを示す教師情報が付加された第3の画像から、前記教師情報が示す領域を切り出すことで生成された複数の第1の画像を用いて学習された特徴モデルと、前記複数のクラスと前記特徴モデルにより前記複数の第1の画像それぞれから算出される第1の特徴量との間の関係を示す特徴分布情報とを記憶する記憶部と、
前記検出モデルを用いて、第2の画像の中から異なる複数の領域を判定し、前記複数の領域それぞれにおけるクラスの判定結果の信頼度を算出し、前記複数の領域それぞれについて、前記特徴モデルを用いて当該領域に対する第2の特徴量を算出し、前記特徴分布情報および前記算出した第2の特徴量を用いて前記信頼度を修正し、前記修正した信頼度に基づいて、前記複数の領域のうち1以上の領域を選択する処理部と、
を有する検出装置。 - コンピュータが、
複数のクラスのうち何れか1つのクラスに属する物体がそれぞれ写った画像であって、物体が写った領域および当該物体が属するクラスを示す教師情報が付加された第3の画像から、前記教師情報が示す領域を切り出すことで生成された複数の第1の画像を用いて、入力された画像の特徴量を算出する特徴モデルを学習し、
前記特徴モデルを用いて、前記複数の第1の画像それぞれに対する第1の特徴量を算出し、前記複数のクラスと前記第1の特徴量との間の関係を示す特徴分布情報を生成し、
複数の第2の画像を用いて、入力された画像から物体が写った領域および当該物体が属するクラスを判定する検出モデルを学習する際に、前記特徴モデルを用いて、前記検出モデルにより前記複数の第2の画像の中から判定された領域に対する第2の特徴量を算出し、前記特徴分布情報および前記第2の特徴量を用いて、前記検出モデルのクラスの判定精度を示す評価値を修正し、前記修正した評価値に基づいて前記検出モデルを更新する、
学習方法。 - コンピュータが、
入力された画像から物体が写った領域および当該物体が属するクラスを判定する検出モデルと、入力された画像の特徴量を算出するモデルであって、複数のクラスのうち何れか1つのクラスに属する物体が写った領域および当該物体が属するクラスを示す教師情報が付加された第3の画像から、前記教師情報が示す領域を切り出すことで生成された複数の第1の画像を用いて学習された特徴モデルと、前記複数のクラスと前記特徴モデルにより前記複数の第1の画像それぞれから算出される第1の特徴量との間の関係を示す特徴分布情報とを取得し、
前記検出モデルを用いて、第2の画像の中から異なる複数の領域を判定し、前記複数の領域それぞれにおけるクラスの判定結果の信頼度を算出し、
前記複数の領域それぞれについて、前記特徴モデルを用いて当該領域に対する第2の特徴量を算出し、前記特徴分布情報および前記算出した第2の特徴量を用いて前記信頼度を修正し、
前記修正した信頼度に基づいて、前記複数の領域のうち1以上の領域を選択する、
検出方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018193387A JP7208480B2 (ja) | 2018-10-12 | 2018-10-12 | 学習プログラム、検出プログラム、学習装置、検出装置、学習方法および検出方法 |
| US16/597,558 US11049014B2 (en) | 2018-10-12 | 2019-10-09 | Learning apparatus, detecting apparatus, learning method, and detecting method |
| EP19202203.6A EP3637320B1 (en) | 2018-10-12 | 2019-10-09 | Computer program, learning apparatus, detecting apparatus, learning method, and detecting method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018193387A JP7208480B2 (ja) | 2018-10-12 | 2018-10-12 | 学習プログラム、検出プログラム、学習装置、検出装置、学習方法および検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020061066A JP2020061066A (ja) | 2020-04-16 |
| JP7208480B2 true JP7208480B2 (ja) | 2023-01-19 |
Family
ID=68242460
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018193387A Active JP7208480B2 (ja) | 2018-10-12 | 2018-10-12 | 学習プログラム、検出プログラム、学習装置、検出装置、学習方法および検出方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11049014B2 (ja) |
| EP (1) | EP3637320B1 (ja) |
| JP (1) | JP7208480B2 (ja) |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10311288B1 (en) * | 2017-03-24 | 2019-06-04 | Stripe, Inc. | Determining identity of a person in a digital image |
| KR102695522B1 (ko) * | 2018-10-17 | 2024-08-14 | 삼성전자주식회사 | 이미지 인식 모델을 트레이닝시키는 장치 및 방법과 이미지 인식 장치 및 방법 |
| JP7261022B2 (ja) * | 2019-01-30 | 2023-04-19 | キヤノン株式会社 | 情報処理システム、端末装置及びその制御方法、プログラム、記憶媒体 |
| WO2020223798A1 (en) * | 2019-05-03 | 2020-11-12 | Huron Technologies International Inc. | Image diagnostic system, and methods of operating thereof |
| US11610142B2 (en) * | 2019-05-28 | 2023-03-21 | Ati Technologies Ulc | Safety monitor for image misclassification |
| CN111798416B (zh) * | 2019-06-20 | 2023-04-18 | 太原理工大学 | 基于病理图像与深度学习的肾小球智能检测方法及系统 |
| US11288507B2 (en) * | 2019-09-27 | 2022-03-29 | Sony Corporation | Object detection in image based on stochastic optimization |
| EP3882823B1 (en) * | 2020-03-17 | 2025-08-06 | Samsung Electronics Co., Ltd. | Method and apparatus with softmax approximation |
| CN111553282B (zh) * | 2020-04-29 | 2024-03-29 | 北京百度网讯科技有限公司 | 用于检测车辆的方法和装置 |
| US11132607B1 (en) * | 2020-05-05 | 2021-09-28 | StradVision, Inc. | Method for explainable active learning, to be used for object detector, by using deep encoder and active learning device using the same |
| CN111652114B (zh) * | 2020-05-29 | 2023-08-25 | 深圳市商汤科技有限公司 | 一种对象检测方法、装置、电子设备及存储介质 |
| CN111767802B (zh) * | 2020-06-05 | 2024-02-06 | 京东科技控股股份有限公司 | 一种对象异常状态的检测方法和装置 |
| DE102020207324A1 (de) * | 2020-06-12 | 2021-12-16 | Robert Bosch Gesellschaft mit beschränkter Haftung | Plausibilisierung der Ausgabe eines Bildklassifikators mit einem Generator für abgewandelte Bilder |
| KR102191722B1 (ko) * | 2020-07-15 | 2020-12-16 | 세종대학교산학협력단 | 딥러닝 모델의 취약점 판단 장치 및 방법 |
| US12602908B2 (en) * | 2020-07-27 | 2026-04-14 | Nec Corporation | Information processing device, information processing method, and a non-transitory computer readable recording medium including selecting a base image including a target region with an object subject to machine learning and for combination with another target region in another image to include in a dataset for training a machine learning model |
| JP2022025863A (ja) * | 2020-07-30 | 2022-02-10 | Kyb株式会社 | 異常検知装置、異常検知方法及びプログラム |
| CN112132220A (zh) * | 2020-09-24 | 2020-12-25 | 杭州海康威视数字技术股份有限公司 | 一种自训练方法、系统、装置、电子设备及存储介质 |
| JP7085605B2 (ja) * | 2020-10-30 | 2022-06-16 | みずほリサーチ&テクノロジーズ株式会社 | モデル評価システム、モデル評価方法及びモデル評価プログラム |
| KR20230104253A (ko) * | 2020-11-13 | 2023-07-07 | 구글 엘엘씨 | 이상 검출 및 위치 측정을 위한 자기-감독 학습 |
| CN114693962B (zh) * | 2020-12-25 | 2025-10-28 | 北京灵汐科技有限公司 | 图像检测方法、处理核、电子设备和计算机可读介质 |
| CN112668482B (zh) * | 2020-12-29 | 2023-11-21 | 中国平安人寿保险股份有限公司 | 人脸识别训练方法、装置、计算机设备及存储介质 |
| CN114764773A (zh) * | 2021-01-12 | 2022-07-19 | 欧姆龙(上海)有限公司 | 物品检测方法、装置以及电子设备 |
| JP7623868B2 (ja) * | 2021-03-26 | 2025-01-29 | 株式会社デンソーテン | データ処理装置及び方法 |
| CN113657236A (zh) * | 2021-08-10 | 2021-11-16 | 支付宝(杭州)信息技术有限公司 | 无人货柜上新后的取出商品识别方法和装置 |
| US20250139959A1 (en) * | 2021-09-17 | 2025-05-01 | Google Llc | Detecting objects in images by generating sequences of tokens |
| GB2611765B (en) * | 2021-10-08 | 2024-01-31 | Samsung Electronics Co Ltd | Method, system and apparatus for monocular depth estimation |
| CN118284904A (zh) | 2021-11-10 | 2024-07-02 | 富士胶片株式会社 | 学习方法、学习装置、学习程序及图像处理装置 |
| US12266098B2 (en) * | 2021-11-11 | 2025-04-01 | International Business Machines Corporation | Improving model performance by artificial blending of healthy tissue |
| JP7775668B2 (ja) * | 2021-11-26 | 2025-11-26 | セイコーエプソン株式会社 | 機械学習モデルを用いてクラス分類処理を実行する方法、情報処理装置、及び、コンピュータープログラム |
| US20250046059A1 (en) * | 2021-12-28 | 2025-02-06 | Nec Corporation | Object recognition device, object recognition method, and recording medium |
| JP7664867B2 (ja) | 2022-01-18 | 2025-04-18 | 株式会社東芝 | 学習装置、検出装置、学習システム、学習方法、学習プログラム、検出方法、および検出プログラム |
| JP7784661B2 (ja) * | 2022-01-19 | 2025-12-12 | 国立大学法人信州大学 | 森林被害木自動検出装置、森林被害木自動検出方法およびプログラム |
| JP2024056495A (ja) * | 2022-10-11 | 2024-04-23 | 富士通株式会社 | 機械学習プログラム,機械学習方法及び情報処理装置 |
| CN117975078A (zh) * | 2022-10-26 | 2024-05-03 | 鸿海精密工业股份有限公司 | 图像识别方法、电子设备及存储介质 |
| EP4365854A1 (en) * | 2022-11-03 | 2024-05-08 | Nokia Solutions and Networks Oy | Object detection and positioning based on bounding box variations |
| KR20240067149A (ko) * | 2022-11-04 | 2024-05-16 | 삼성전자주식회사 | 자동 레이블링을 위한 트레이닝 방법 및 자동 레이블링 장치 |
| JP7827168B2 (ja) * | 2022-11-24 | 2026-03-10 | 日本電気株式会社 | 学習装置、予測装置、学習方法、及び、プログラム |
| KR102934830B1 (ko) * | 2023-03-28 | 2026-03-05 | 국방과학연구소 | 학습 데이터 정보량 평가 장치 및 방법 |
| JP2024179312A (ja) * | 2023-06-14 | 2024-12-26 | 富士通株式会社 | 機械学習プログラム、判定プログラム、及び機械学習装置 |
| WO2026006605A1 (en) * | 2024-06-27 | 2026-01-02 | Mozarc Medical Us Llc | Systems and methods for computer vision fault detection in dialysis apparatus |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012203634A (ja) | 2011-03-25 | 2012-10-22 | Toshiba Corp | 認識装置、方法及びプログラム |
| JP2018032078A (ja) | 2016-08-22 | 2018-03-01 | Kddi株式会社 | 他の物体の画像領域も考慮して物体を追跡する装置、プログラム及び方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005044330A (ja) | 2003-07-24 | 2005-02-17 | Univ Of California San Diego | 弱仮説生成装置及び方法、学習装置及び方法、検出装置及び方法、表情学習装置及び方法、表情認識装置及び方法、並びにロボット装置 |
| JP5100688B2 (ja) | 2009-03-10 | 2012-12-19 | 株式会社豊田中央研究所 | 対象物検出装置及びプログラム |
| JP5290229B2 (ja) | 2010-03-30 | 2013-09-18 | セコム株式会社 | 学習装置及び対象物検知装置 |
| JP2014010778A (ja) | 2012-07-02 | 2014-01-20 | Nippon Telegr & Teleph Corp <Ntt> | 認識モデル学習装置、認識装置、方法、及びプログラム |
| WO2017024845A1 (en) * | 2015-08-07 | 2017-02-16 | Beijing Huandu Institute Of Wisdom-Mind Technology Ltd. | Stimulus information compiling method and system for tests |
| JP2018091656A (ja) * | 2016-11-30 | 2018-06-14 | キヤノン株式会社 | 情報処理装置、計測装置、システム、算出方法、プログラムおよび物品の製造方法 |
| CN108089958B (zh) * | 2017-12-29 | 2021-06-08 | 珠海市君天电子科技有限公司 | Gpu测试方法、终端设备和计算机可读存储介质 |
-
2018
- 2018-10-12 JP JP2018193387A patent/JP7208480B2/ja active Active
-
2019
- 2019-10-09 EP EP19202203.6A patent/EP3637320B1/en active Active
- 2019-10-09 US US16/597,558 patent/US11049014B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012203634A (ja) | 2011-03-25 | 2012-10-22 | Toshiba Corp | 認識装置、方法及びプログラム |
| JP2018032078A (ja) | 2016-08-22 | 2018-03-01 | Kddi株式会社 | 他の物体の画像領域も考慮して物体を追跡する装置、プログラム及び方法 |
Non-Patent Citations (1)
| Title |
|---|
| KIM, Nuri、他2名,Learning Instance-Aware Object Detection Using Determinantal Point Processes,Computer Vision and Pattern Recognition,ARXIV.ORG, CORNELL UNIVERSITY LIBRARY,2018年05月30日,p.1-19,https://doi.org/10.48550/arXiv.1805.10765 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020061066A (ja) | 2020-04-16 |
| US11049014B2 (en) | 2021-06-29 |
| US20200117991A1 (en) | 2020-04-16 |
| EP3637320B1 (en) | 2021-10-20 |
| EP3637320A1 (en) | 2020-04-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7208480B2 (ja) | 学習プログラム、検出プログラム、学習装置、検出装置、学習方法および検出方法 | |
| US10452899B2 (en) | Unsupervised deep representation learning for fine-grained body part recognition | |
| JP5227888B2 (ja) | 人物追跡方法、人物追跡装置および人物追跡プログラム | |
| JP5227639B2 (ja) | オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム | |
| JP5227629B2 (ja) | オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム | |
| JP7353198B2 (ja) | 計算機、識別器の学習方法、および分析システム | |
| KR20160096460A (ko) | 복수의 분류기를 포함하는 딥 러닝 기반 인식 시스템 및 그 제어 방법 | |
| CN111539911B (zh) | 一种口呼吸面容识别方法、设备和存储介质 | |
| CN106897738A (zh) | 一种基于半监督学习的行人检测方法 | |
| KR20190114384A (ko) | 신경망을 기반으로 하는 피부 병변 진단 장치 및 방법 | |
| CN111738249A (zh) | 图像检测方法、装置、电子设备及存储介质 | |
| CN116934747B (zh) | 眼底图像分割模型训练方法、设备和青光眼辅助诊断系统 | |
| KR20210028966A (ko) | 작물 이미지의 병해충 검출 방법 및 장치 | |
| JP5027030B2 (ja) | オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム | |
| JP7164049B2 (ja) | 物体検知装置、学習方法、及び、プログラム | |
| CN121219747A (zh) | 视频帧中的分割 | |
| US11809994B2 (en) | Information processing apparatus, information processing method, and non-transitory computer-readable storage medium | |
| KR101991307B1 (ko) | 다중 객체 추적을 위한 트랙렛의 특징 벡터 할당이 가능한 전자 장치 및 그 동작 방법 | |
| US20220277552A1 (en) | Object sensing device, learning method, and recording medium | |
| US12412378B2 (en) | Object detection device, learned model generation method, and recording medium | |
| US12444059B2 (en) | Information processing apparatus, learning apparatus, and tracking method | |
| CN116091784B (zh) | 一种目标跟踪方法、设备及存储介质 | |
| US20230095985A1 (en) | Information processing apparatus, information processing method, and storage medium | |
| CN118053174A (zh) | 一种身体特征快速定位方法及系统 | |
| WO2022099133A1 (en) | Using activation maps to detect best areas of an image for prediction of noise levels |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210709 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20210715 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210715 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220607 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220614 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220810 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221219 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7208480 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |