JP7223552B2 - 表示装置、及び、自動走行システム - Google Patents
表示装置、及び、自動走行システム Download PDFInfo
- Publication number
- JP7223552B2 JP7223552B2 JP2018204159A JP2018204159A JP7223552B2 JP 7223552 B2 JP7223552 B2 JP 7223552B2 JP 2018204159 A JP2018204159 A JP 2018204159A JP 2018204159 A JP2018204159 A JP 2018204159A JP 7223552 B2 JP7223552 B2 JP 7223552B2
- Authority
- JP
- Japan
- Prior art keywords
- work
- display
- position information
- work vehicle
- working
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000010295 mobile communication Methods 0.000 description 15
- 238000004891 communication Methods 0.000 description 12
- 230000005540 biological transmission Effects 0.000 description 10
- 238000001514 detection method Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 9
- 238000005259 measurement Methods 0.000 description 8
- 230000002441 reversible effect Effects 0.000 description 4
- 238000003971 tillage Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 244000025254 Cannabis sativa Species 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000002706 hydrostatic effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000010899 nucleation Methods 0.000 description 1
Images









Landscapes
- Guiding Agricultural Machines (AREA)
- Traffic Control Systems (AREA)
Description
作業車両に装着されて所定の作業を行う作業装置の作業位置情報を取得する作業位置情報取得部と、
前記作業車両位置情報取得部にて取得する作業車両の位置情報、及び、前記作業位置情報取得部にて取得する作業位置情報に基づいて、作業装置の作業位置を基準として作業車両と作業装置との位置関係を表示させる作業位置基準表示形態にて表示部の表示エリアに表示させる表示制御部とが備えられている点にある。
作業車両に装着されて所定の作業を行う作業装置の作業位置情報を取得する作業位置情報取得部と、
前記作業車両位置情報取得部にて取得する作業車両の位置情報、及び、前記作業位置情報取得部にて取得する作業位置情報に基づいて、作業装置の作業位置を基準として作業車両と作業装置との位置関係を表示させる作業位置基準表示形態にて表示部の表示エリアに表示させる表示制御部とが備えられている点にある。
この自動走行システムは、図1に示すように、作業車両としてトラクタ1を適用しているが、トラクタ以外の、乗用田植機、コンバイン、乗用草刈機、ホイールローダ、除雪車等の乗用作業車両、及び、無人草刈機等の無人作業車両に適用することができる。
本発明の他の実施形態について説明する。
尚、以下に説明する各実施形態の構成は、夫々単独で適用することに限らず、他の実施形態の構成と組み合わせて適用することも可能である。
例えば、作業車両は、エンジン9と走行用の電動モータとを備えるハイブリット仕様に構成されていてもよく、また、エンジン9に代えて走行用の電動モータを備える電動仕様に構成されていてもよい。
例えば、作業車両は、走行部として、左右の後輪6に代えて左右のクローラを備えるセミクローラ仕様に構成されていてもよい。
例えば、作業車両は、左右の後輪6が操舵輪として機能する後輪ステアリング仕様に構成されていてもよい。
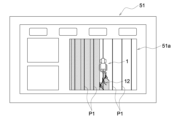
例えば、表示エリア51aにおいて作業装置12の作業位置を位置させる箇所をユーザが指定することができる。この場合には、表示制御部58が、表示エリア51aにおいてユーザが指定した箇所に作業装置12の作業位置を位置させる形態で、トラクタ1と作業装置12とに加えて、作業位置ラインL又は作業経路P1を重畳表示させることができる。
例えば、表示エリア51aにおいてトラクタ1の走行位置を位置させる箇所をユーザが指定することができる。この場合には、表示制御部58が、表示エリア51aにおいてユーザが指定した箇所にトラクタ1の走行位置を位置させる形態で、作業経路P1とトラクタ1と作業装置12とを重畳表示させることができる。
12 作業装置
51 表示部
51a 表示エリア
56 作業車両位置情報取得部
57 作業位置情報取得部
58 表示制御部
P 目標走行経路
Claims (4)
- 目標走行経路に沿って自動走行させる作業車両の位置情報を取得する作業車両位置情報取得部と、
作業車両に装着されて所定の作業を行う作業装置の作業位置情報を取得する作業位置情報取得部と、
前記作業車両位置情報取得部にて取得する作業車両の位置情報、及び、前記作業位置情報取得部にて取得する作業位置情報に基づいて、前記目標走行経路に直交するオフセット方向において互いに離れた位置である作業車両の位置と作業装置の作業位置との位置関係を、作業装置の作業位置を基準とする作業位置基準表示形態にて表示部の表示エリアに表示させる表示制御部とが備えられており、
前記作業位置基準表示形態では、前記表示制御部が、前記表示エリアにおいて前記オフセット方向で作業装置の作業位置を中央部又は略中央部に位置させる形態で、作業車両と作業装置との位置関係を表示させる、
表示装置。 - 目標走行経路に沿って自動走行させる作業車両の位置情報を取得する作業車両位置情報取得部と、
作業車両に装着されて所定の作業を行う作業装置の作業位置情報を取得する作業位置情報取得部と、
前記作業車両位置情報取得部にて取得する作業車両の位置情報、及び、前記作業位置情報取得部にて取得する作業位置情報に基づいて、作業装置の作業位置を基準として作業車両と作業装置との位置関係を表示させる作業位置基準表示形態にて表示部の表示エリアに表示させる表示制御部とが備えられており、
前記表示制御部は、前記作業車両位置情報取得部にて取得する作業車両の位置情報、及び、前記作業位置情報取得部にて取得する作業位置情報に基づいて、作業車両の走行位置を基準として目標走行経路と作業車両と作業装置との位置関係を表示させる走行位置基準表示形態にて前記表示エリアに表示可能であり、且つ、前記表示エリアにおける表示形態を、前記作業位置基準表示形態と前記走行位置基準表示形態とに切替自在に構成されている、
表示装置。 - 目標走行経路に沿って自動走行させる作業車両の位置情報を取得する作業車両位置情報取得部と、
作業車両に装着されて所定の作業を行う作業装置の作業位置情報を取得する作業位置情報取得部と、
前記作業車両位置情報取得部にて取得する作業車両の位置情報、及び、前記作業位置情報取得部にて取得する作業位置情報に基づいて、前記目標走行経路に直交するオフセット方向において互いに離れた位置である作業車両の位置と作業装置の作業位置との位置関係を、作業装置の作業位置を基準とする作業位置基準表示形態にて表示部の表示エリアに表示させる表示制御部とが備えられており、
前記作業位置基準表示形態では、前記表示制御部が、前記表示エリアにおいて前記オフセット方向で作業装置の作業位置を中央部又は略中央部に位置させる形態で、作業車両と作業装置との位置関係を表示させる、
自動走行システム。 - 目標走行経路に沿って自動走行させる作業車両の位置情報を取得する作業車両位置情報取得部と、
作業車両に装着されて所定の作業を行う作業装置の作業位置情報を取得する作業位置情報取得部と、
前記作業車両位置情報取得部にて取得する作業車両の位置情報、及び、前記作業位置情報取得部にて取得する作業位置情報に基づいて、作業装置の作業位置を基準として作業車両と作業装置との位置関係を表示させる作業位置基準表示形態にて表示部の表示エリアに表示させる表示制御部とが備えられており、
前記表示制御部は、前記作業車両位置情報取得部にて取得する作業車両の位置情報、及び、前記作業位置情報取得部にて取得する作業位置情報に基づいて、作業車両の走行位置を基準として目標走行経路と作業車両と作業装置との位置関係を表示させる走行位置基準表示形態にて前記表示エリアに表示可能であり、且つ、前記表示エリアにおける表示形態を、前記作業位置基準表示形態と前記走行位置基準表示形態とに切替自在に構成されている、
自動走行システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018204159A JP7223552B2 (ja) | 2018-10-30 | 2018-10-30 | 表示装置、及び、自動走行システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018204159A JP7223552B2 (ja) | 2018-10-30 | 2018-10-30 | 表示装置、及び、自動走行システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020068693A JP2020068693A (ja) | 2020-05-07 |
| JP7223552B2 true JP7223552B2 (ja) | 2023-02-16 |
Family
ID=70546867
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018204159A Active JP7223552B2 (ja) | 2018-10-30 | 2018-10-30 | 表示装置、及び、自動走行システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7223552B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7496732B2 (ja) * | 2020-08-06 | 2024-06-07 | 三菱マヒンドラ農機株式会社 | 作業車両 |
| JP7388339B2 (ja) * | 2020-11-05 | 2023-11-29 | 井関農機株式会社 | 作業車両 |
| JP7645634B2 (ja) * | 2020-12-18 | 2025-03-14 | 日立チャネルソリューションズ株式会社 | 作業車制御端末及び作業車制御方法 |
| JP7651673B2 (ja) * | 2021-02-16 | 2025-03-26 | 株式会社クボタ | 農作業支援装置、農作業支援システム、農業機械 |
| JP2024004952A (ja) * | 2022-06-29 | 2024-01-17 | ヤンマーホールディングス株式会社 | 自動走行作業方法、自動走行作業システム、および、プログラム |
| JP7805908B2 (ja) * | 2022-10-24 | 2026-01-26 | 株式会社クボタ | 作業機の遠隔操作支援システム、遠隔装置 |
| JP2024078968A (ja) * | 2022-11-30 | 2024-06-11 | ヤンマーホールディングス株式会社 | 危険領域管理方法、危険領域管理システム、及び危険領域管理プログラム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015112056A (ja) | 2013-12-11 | 2015-06-22 | 井関農機株式会社 | 農用作業車両 |
| JP2017139982A (ja) | 2016-02-09 | 2017-08-17 | 株式会社クボタ | 作業車 |
| JP2017211733A (ja) | 2016-05-24 | 2017-11-30 | ヤンマー株式会社 | 自律走行経路生成システム |
| WO2018055921A1 (ja) | 2016-09-26 | 2018-03-29 | ヤンマー株式会社 | 経路生成システム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5991694A (en) * | 1995-11-13 | 1999-11-23 | Caterpillar Inc. | Method and apparatus for determining the location of seedlings during agricultural production |
| EP2158799B9 (en) * | 2008-08-27 | 2012-12-26 | CLAAS Tractor S.A.S. | Self-propelled agricultural working machine |
-
2018
- 2018-10-30 JP JP2018204159A patent/JP7223552B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015112056A (ja) | 2013-12-11 | 2015-06-22 | 井関農機株式会社 | 農用作業車両 |
| JP2017139982A (ja) | 2016-02-09 | 2017-08-17 | 株式会社クボタ | 作業車 |
| JP2017211733A (ja) | 2016-05-24 | 2017-11-30 | ヤンマー株式会社 | 自律走行経路生成システム |
| WO2018055921A1 (ja) | 2016-09-26 | 2018-03-29 | ヤンマー株式会社 | 経路生成システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020068693A (ja) | 2020-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7759366B2 (ja) | 自動走行システム及び自動走行方法 | |
| JP7223552B2 (ja) | 表示装置、及び、自動走行システム | |
| JP7384950B2 (ja) | 自動走行システム | |
| KR102789397B1 (ko) | 경로 생성 시스템 | |
| JP7036707B2 (ja) | 走行経路生成装置 | |
| JP2021078440A (ja) | 作業車両用の自動走行システム | |
| KR102863666B1 (ko) | 주행 상태 표시 장치 및 자동 주행 시스템 | |
| JP2023090789A (ja) | 自動走行システム及び自動走行方法 | |
| JP7453954B2 (ja) | 自動走行システム | |
| JP7094832B2 (ja) | 協調作業システム | |
| JP7229119B2 (ja) | 自動走行システム | |
| JP7094833B2 (ja) | 走行経路表示装置 | |
| JP7100539B2 (ja) | 自動走行システム | |
| KR102764778B1 (ko) | 자동 주행 시스템 | |
| JP7329645B2 (ja) | 作業支援システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20200814 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210112 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220111 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220302 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220614 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220808 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230124 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230206 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7223552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |