JP7243045B2 - 操舵制御装置 - Google Patents
操舵制御装置 Download PDFInfo
- Publication number
- JP7243045B2 JP7243045B2 JP2018106409A JP2018106409A JP7243045B2 JP 7243045 B2 JP7243045 B2 JP 7243045B2 JP 2018106409 A JP2018106409 A JP 2018106409A JP 2018106409 A JP2018106409 A JP 2018106409A JP 7243045 B2 JP7243045 B2 JP 7243045B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- state quantity
- grip
- axial force
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
上記操舵制御装置において、前記グリップ状態量演算部は、前記走行状態量が前記低速状態であることを示す場合には、前記第1グリップ成分のみが含まれる配分比率で前記グリップ状態量を演算することが好ましい。
上記構成によれば、適切な走行状態量に基づいて車両の走行状態を判断し、グリップ状態量を演算できる。
以下、操舵制御装置の第1実施形態を図面に従って説明する。
図1に示すように、操舵制御装置1の制御対象となるステアバイワイヤ式の操舵装置2は、運転者により操舵される操舵部3と、運転者による操舵部3の操舵に応じて転舵輪4を転舵させる転舵部5とを備えている。
操舵制御装置1は、操舵側アクチュエータ13(操舵側モータ14)及び転舵側アクチュエータ31(転舵側モータ33)に接続されており、これらの作動を制御する。なお、操舵制御装置1は、図示しない中央処理装置(CPU)やメモリを備えており、所定の演算周期ごとにメモリに記憶されたプログラムをCPUが実行することによって、各種制御が実行される。
図2に示すように、操舵制御装置1は、操舵側モータ制御信号Msを出力する制御部としての操舵側制御部51と、操舵側モータ制御信号Msに基づいて操舵側モータ14に駆動電力を供給する操舵側駆動回路52とを備えている。操舵側制御部51には、操舵側駆動回路52と操舵側モータ14の各相のモータコイルとの間の接続線53を流れる操舵側モータ14の各相電流値Ius,Ivs,Iwsを検出する電流センサ54が接続されている。なお、図2では、説明の便宜上、各相の接続線53及び各相の電流センサ54をそれぞれ1つにまとめて図示している。
操舵側制御部51には、上記車速V、操舵トルクTh、回転角θs、横加速度LA、ヨーレートγ、各相電流値Ius,Ivs,Iws及びq軸電流値Iqtが入力される。そして、操舵側制御部51は、これら各状態量に基づいて操舵側モータ制御信号Msを生成して出力する。
転舵側制御部55には、上記回転角θt、目標操舵角θh*及び転舵側モータ33の各相電流値Iut,Ivt,Iwtが入力される。そして、転舵側制御部55は、これら各状態量に基づいて転舵側モータ制御信号Mtを生成して出力する。
図3に示すように、目標操舵角演算部64は、ステアリングホイール11を回転させる力である入力トルク基礎成分Tb*を演算する入力トルク基礎成分演算部81と、ステアリングホイール11の回転に抗する力である反力成分Firを演算する反力成分演算部82とを備えている。また、目標操舵角演算部64は、操舵トルクTh、入力トルク基礎成分Tb*及び反力成分Firに基づいて目標操舵角θh*を演算する目標角演算処理部83を備えている。
このモデル式は、ステアリングホイール11(操舵部3)と転舵輪4(転舵部5)とが機械的に連結されたものにおいて、ステアリングホイール11の回転に伴って回転する回転軸のトルクと回転角との関係を定めて表したものである。そして、このモデル式は、操舵装置2の摩擦等をモデル化した粘性係数C、操舵装置2の慣性をモデル化した慣性係数Jを用いて表される。なお、粘性係数C及び慣性係数Jは、車速Vに応じて可変設定される。また、第2及び第3調整ゲインK2,K3は、後述する調整ゲイン演算部68からそれぞれ出力されるものである。そして、このようにモデル式を用いて演算された目標操舵角θh*は、上記減算器69及び転舵側制御部55(図2参照)に加え、反力成分演算部82に出力される。
反力成分演算部82には、車速V、目標操舵角θh*、転舵側モータ33の実電流値である相電流値Iut,Ivt,Iwt及び第4調整ゲインK4が入力される。反力成分演算部82は、これらの状態量に基づいてラック軸22に作用する軸力に応じた反力成分Fir(ベース反力)を演算し、上記減算器86に出力する。
図2に示すように、グリップ状態量演算部67には、理想軸力Fib、路面軸力Fer、車速V、ヨーレートγ及び横加速度LAが入力される。グリップ状態量演算部67は、これらの各状態量に基づいてグリップ状態量Grを演算する。
なお、「γ’」は、ヨーレートγの微分値を示し、「Kla」及び「Kγ」は、試験等により予め設定された係数を示す。そして、車両状態量軸力演算部101は、このように演算される横力Fyが近似的にラック軸22に作用する軸力とみなすことができることを踏まえ、該横力Fyを車両状態量軸力Fyrとして出力する。
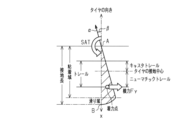
図5は、スリップ角βが付いている転舵輪の接地面を上から見た図である。転舵輪の向きに向かう中心線xが元々の転舵輪の向きを示しており、転舵輪の進行方向はこれに対して線αで示している。同図において、A点が転舵輪の接地開始点で、B点が接地終了点とすると、スリップ角β分だけ、トレッド面が路面に引きずられて中心線xから線αのラインに沿ってずれて撓む。なお、図5において、トレッド面がずれて撓んだ領域をハッチングで示す。この撓んだ領域のうち、A点側の領域が粘着域であり、B点側の領域が滑り域である。そして、このようなスリップ角βで旋回したときの転舵輪の接地面の着力点には、横力Fyが働き、鉛直軸周りのモーメントがセルフアライニングトルクSATとなる。なお、転舵輪の接地中心と着力点間の距離がニューマチックトレールであり、ニューマチックトレールとキャスタトレールの和がトレールである。
そして、セルフアライニングトルクSATを「軸力≒路面からの反力」と考えると、転舵側モータ33の駆動電流(すなわち、q軸電流値Iqt)に基づく路面軸力FerがセルフアライニングトルクSATを近似的に表現しているといえる。
グリップ状態量Gr=セルフアライニングトルクSAT/横力Fy…(4)
そして、路面軸力FerがセルフアライニングトルクSATを近似的に表現でき、車両状態量軸力Fyrが横力を近似的に表現できることを踏まえると、グリップ状態量Grは、下記(5)式のように表すことができる。
なお、「Ker」及び「Ky」は、試験等により予め設定された係数を示す。
ここで、車両状態はその走行状態に応じて変化するため、ヨーレートγ及び横加速度LAに基づく車両状態量軸力Fyrを用いることで、車両の挙動が大きく変化する場合においてラック軸22に実際に作用している軸力を、理想軸力Fibと比べて正確に推定できる。しかし、ヨーレートγ及び横加速度LAは、車両が停止状態を含む低速状態である場合には、その値が小さくなるため、ヨーレートセンサ45及び横加速度センサ46の出力値に対するノイズの大きさが相対的に大きくなる。この場合、ヨーレートγ及び横加速度LAでは、目標操舵角θh*と比べて軸力を精度良く検出できない。
図2に示すように、上記のように演算されたグリップ状態量Grは、調整ゲイン演算部68に入力される。図7に示すように、調整ゲイン演算部68は、第1~第4調整ゲイン演算部111~114を備えており、グリップ状態量Grは、第1~第4調整ゲイン演算部111~114のそれぞれに入力される。
例えば車両が低μ路面を走行し、スリップ角βが大きくなりやすい状況下において、第1~第4調整ゲインK1~K4の各値が、グリップ状態量Grを考慮しない場合に比べ、最終的に目標反力トルクTs*を小さくするように設定された場合を想定する。この場合、例えばスリップ角βが大きくなって限界領域に入る前の段階から、通常よりも操舵側モータ14からステアリングホイール11に付与される操舵反力を小さくでき、所謂抜け感が生じることで、低μ路であるといった路面情報を運転者が認識しやすくなる。
(1)グリップ状態量演算部67は、横加速度LA及び車速Vが低速状態であることを示し、車両状態量軸力Fyrの精度を確保できない場合には、理想軸力Fib及び路面軸力Ferに基づく第1グリップ成分Gr1が含まれる配分比率でグリップ状態量Grを演算する。そして、横加速度LA及び車速Vが中高速状態であることを示し、車両状態量軸力Fyrの精度を確保できる場合には、車両状態量軸力Fyr及び路面軸力Ferに基づく第2グリップ成分Gr2が含まれる配分比率でグリップ状態量Grを演算する。したがって、適切なグリップ状態量Grを演算でき、グリップ状態量Grを考慮して操舵反力を適切に補償できる。
次に、操舵制御装置の第2実施形態を図面に従って説明する。なお、説明の便宜上、同一の構成については上記第1実施形態と同一の符号を付してその説明を省略する。
(4)グリップ状態量演算部67は、横加速度LA及び車速Vの少なくとも一方が車両の低速状態であることを示す場合には、理想軸力Fibに基づく第1グリップ成分Gr1のみが含まれる、すなわち車両状態量軸力Fyrに基づく第2グリップ成分Gr2を用いずにグリップ状態量Grを演算する。上記のように第1グリップ成分Gr1は、車両の低速状態で精度の良い理想軸力Fibに基づく値であり、車両の中高速状態で精度が低下する車両状態量軸力Fyrに基づかないため、本実施形態のグリップ状態量演算部67では、より適切にグリップ状態量を演算できる。
次に、操舵制御装置の第3実施形態を図面に従って説明する。なお、説明の便宜上、同一の構成については上記第1実施形態と同一の符号を付してその説明を省略する。
(第4実施形態)
次に、操舵制御装置の第4実施形態を図面に従って説明する。なお、説明の便宜上、同一の構成については上記第1実施形態と同一の符号を付してその説明を省略する。
(第5実施形態)
次に、操舵制御装置の第5実施形態を図面に従って説明する。なお、説明の便宜上、同一の構成については上記第4実施形態と同一の符号を付してその説明を省略する。
本実施形態は、以下のように変更して実施することができる。本実施形態及び以下の変形例は、技術的に矛盾しない範囲で互いに組み合わせて実施することができる。
・上記各実施形態において、転舵側アクチュエータ31として、例えばラック軸22の同軸上に転舵側モータ33を配置するものや、ラック軸22と平行に転舵側モータ33を配置するもの等を用いてもよい。
Claims (4)
- 操舵部と、前記操舵部に入力される操舵に応じて転舵輪を転舵させる転舵部とが機械的に分離した構造又は機械的に断接可能な構造を有する操舵装置を制御対象とし、
前記操舵部に入力される操舵に抗する力である操舵反力を与える操舵側モータの作動を制御する制御部を備え、
前記制御部は、
前記転舵輪の転舵角に換算可能な回転軸の回転角に関連する値に基づく理想軸力を演算する理想軸力演算部と、
路面情報に基づく路面軸力を演算する路面軸力演算部と、
車両の走行状態に応じて変化する車両状態量に基づく車両状態量軸力を演算する車両状態量軸力演算部と、
前記理想軸力、前記路面軸力及び前記車両状態量軸力に基づいて複数のグリップ成分を演算し、該複数のグリップ成分を所定配分比率で合算させることによりグリップ状態量を演算するグリップ状態量演算部とを備え、
前記グリップ状態量を考慮して前記操舵反力の目標値となる目標反力トルクを演算するものであって、
前記車両状態量は、車両に設けられたセンサによって検出される横加速度を含む値であって、車両の走行状態を示す走行状態量が停止状態を含む低速状態であることを示す場合には、前記走行状態量が前記低速状態よりも速い中高速状態であることを示す場合と比べて値が小さくなる特性を有し、
前記グリップ状態量演算部は、前記走行状態量が前記低速状態であることを示すことによって、前記走行状態量が前記中高速状態であることを示す場合と比べて、前記車両状態量の値が小さくなることに起因して当該車両状態量の精度が低下する場合には、前記理想軸力及び前記路面軸力に基づく第1グリップ成分が含まれる配分比率で前記グリップ状態量を演算し、前記走行状態量が前記中高速状態であることを示すことによって、前記走行状態量が前記低速状態であることを示す場合と比べて、前記車両状態量の値が大きくなることに起因して当該車両状態量の精度が向上する場合には、少なくとも前記車両状態量軸力に基づく第2グリップ成分が含まれる配分比率で前記グリップ状態量を演算するように構成されており、
前記グリップ状態量演算部は、前記走行状態量が前記中高速状態の場合に前記低速状態の場合よりも前記第2グリップ成分の配分比率が大きくなるように前記グリップ状態量を演算する操舵制御装置。 - 請求項1に記載の操舵制御装置において、
前記グリップ状態量演算部は、前記走行状態量が前記低速状態であることを示す場合には、前記第1グリップ成分のみが含まれる配分比率で前記グリップ状態量を演算する操舵制御装置。 - 請求項1又は2に記載の操舵制御装置において、
前記グリップ状態量演算部は、前記走行状態量が前記中高速状態であることを示す場合には、前記第2グリップ成分のみが含まれる配分比率で前記グリップ状態量を演算する操舵制御装置。 - 請求項1~3のいずれか一項に記載の操舵制御装置において、
前記走行状態量は、横加速度及び車速の少なくとも一方を含む操舵制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018106409A JP7243045B2 (ja) | 2018-06-01 | 2018-06-01 | 操舵制御装置 |
| CN201910456216.1A CN110550093B (zh) | 2018-06-01 | 2019-05-29 | 转向操纵控制装置 |
| US16/424,634 US11097769B2 (en) | 2018-06-01 | 2019-05-29 | Steering control device |
| EP19177350.6A EP3575185B1 (en) | 2018-06-01 | 2019-05-29 | Steering control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018106409A JP7243045B2 (ja) | 2018-06-01 | 2018-06-01 | 操舵制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019209786A JP2019209786A (ja) | 2019-12-12 |
| JP7243045B2 true JP7243045B2 (ja) | 2023-03-22 |
Family
ID=68844669
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018106409A Active JP7243045B2 (ja) | 2018-06-01 | 2018-06-01 | 操舵制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7243045B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7526623B2 (ja) * | 2020-09-17 | 2024-08-01 | 株式会社ジェイテクト | 操舵制御装置 |
| WO2024075278A1 (ja) * | 2022-10-07 | 2024-04-11 | 日産自動車株式会社 | 操舵制御方法及び操舵制御装置 |
| CN115680902B (zh) * | 2022-10-13 | 2024-05-03 | 中国航发四川燃气涡轮研究院 | 一种航空发动机转子轴向力调整方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004130964A (ja) | 2002-10-11 | 2004-04-30 | Aisin Seiki Co Ltd | 路面状態推定装置、及び該装置を備えた車両の運動制御装置 |
| JP2009040341A (ja) | 2007-08-10 | 2009-02-26 | Nsk Ltd | 電動パワーステアリング装置の制御装置 |
| US20140163822A1 (en) | 2011-08-22 | 2014-06-12 | Zf Lenksysteme Gmbh | Method for determining a steering rock force for a steering device in a vehicle, steering device and open-loop and/or closed-loop control device for a steering device |
| WO2014108984A1 (ja) | 2013-01-11 | 2014-07-17 | 日産自動車株式会社 | 操舵制御装置 |
| JP2014166805A (ja) | 2013-02-28 | 2014-09-11 | Jtekt Corp | 電動パワーステアリング装置 |
| JP2017149359A (ja) | 2016-02-26 | 2017-08-31 | 株式会社ジェイテクト | 操舵制御装置 |
| JP2017165219A (ja) | 2016-03-15 | 2017-09-21 | 株式会社ジェイテクト | 操舵制御装置 |
| DE102017105370A1 (de) | 2017-03-14 | 2018-09-20 | Thyssenkrupp Ag | Schätzung der Zahnstangenkraft in einem Steer-by-Wire System |
-
2018
- 2018-06-01 JP JP2018106409A patent/JP7243045B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004130964A (ja) | 2002-10-11 | 2004-04-30 | Aisin Seiki Co Ltd | 路面状態推定装置、及び該装置を備えた車両の運動制御装置 |
| JP2009040341A (ja) | 2007-08-10 | 2009-02-26 | Nsk Ltd | 電動パワーステアリング装置の制御装置 |
| US20140163822A1 (en) | 2011-08-22 | 2014-06-12 | Zf Lenksysteme Gmbh | Method for determining a steering rock force for a steering device in a vehicle, steering device and open-loop and/or closed-loop control device for a steering device |
| WO2014108984A1 (ja) | 2013-01-11 | 2014-07-17 | 日産自動車株式会社 | 操舵制御装置 |
| JP2014166805A (ja) | 2013-02-28 | 2014-09-11 | Jtekt Corp | 電動パワーステアリング装置 |
| JP2017149359A (ja) | 2016-02-26 | 2017-08-31 | 株式会社ジェイテクト | 操舵制御装置 |
| JP2017165219A (ja) | 2016-03-15 | 2017-09-21 | 株式会社ジェイテクト | 操舵制御装置 |
| DE102017105370A1 (de) | 2017-03-14 | 2018-09-20 | Thyssenkrupp Ag | Schätzung der Zahnstangenkraft in einem Steer-by-Wire System |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019209786A (ja) | 2019-12-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7155616B2 (ja) | 操舵制御装置 | |
| US11097769B2 (en) | Steering control device | |
| JP5126357B2 (ja) | 車両の操舵装置 | |
| JP7133393B2 (ja) | 操舵制御装置 | |
| JP7383384B2 (ja) | 操舵制御装置 | |
| JP7376243B2 (ja) | 操舵制御装置 | |
| JP5092603B2 (ja) | 車両用操舵装置 | |
| US20200130737A1 (en) | Steering control device | |
| JP7147472B2 (ja) | 操舵制御装置 | |
| CN113386851B (zh) | 转向控制器 | |
| JP2020049962A (ja) | モータ制御装置 | |
| CN112407040B (zh) | 转向控制系统 | |
| US20200130738A1 (en) | Steering control device | |
| JP2020163990A (ja) | 操舵制御装置 | |
| JP2019130958A (ja) | 操舵制御装置 | |
| JP7609587B2 (ja) | 操舵制御装置 | |
| JP2021154895A (ja) | 操舵制御装置 | |
| JP7243045B2 (ja) | 操舵制御装置 | |
| JP2019206268A (ja) | 操舵制御装置 | |
| JP7322461B2 (ja) | 操舵制御装置 | |
| JP7099056B2 (ja) | 操舵制御装置 | |
| JP7259495B2 (ja) | 操舵制御装置 | |
| JP7147473B2 (ja) | 操舵制御装置 | |
| JP7087688B2 (ja) | 操舵制御装置 | |
| JP2006335250A (ja) | 車両用操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210525 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220511 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220628 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220808 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20221025 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230111 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20230111 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20230118 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20230124 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230207 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230220 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7243045 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |