JP7295012B2 - 車両制御システム、および、車両制御方法 - Google Patents
車両制御システム、および、車両制御方法 Download PDFInfo
- Publication number
- JP7295012B2 JP7295012B2 JP2019232384A JP2019232384A JP7295012B2 JP 7295012 B2 JP7295012 B2 JP 7295012B2 JP 2019232384 A JP2019232384 A JP 2019232384A JP 2019232384 A JP2019232384 A JP 2019232384A JP 7295012 B2 JP7295012 B2 JP 7295012B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- control system
- vehicle control
- trajectory
- external sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0011—Planning or execution of driving tasks involving control alternatives for a single driving scenario, e.g. planning several paths to avoid obstacles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/04—Traffic conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0097—Predicting future conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0059—Estimation of the risk associated with autonomous or manual driving, e.g. situation too complex, sensor failure or driver incapacity
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/20—Data confidence level
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/25—Data precision
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Mathematical Physics (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Navigation (AREA)
Description
次に、図2の機能ブロック図を参照して、本発明の主要部である、認知判断装置6の詳細な構成について説明する。図2は本実施例に係る認知判断装置6の機能ブロック図である。ここに示すように、認知判断装置6は、認識部61、運転行動計画部62、軌道計画部63から構成されている。
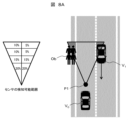
次に、図3A、図3Bを用いて、軌道計画部63による実検知範囲の算出方法について説明する。まず、軌道計画部63は、図3Aに例示する、外界センサ2(ステレオカメラ)から取得した自車両前方の画像を、公知の画像処理手法により、図3Bに例示する俯瞰画像(この時点では、オブジェクトObは存在せず)に変換する。次に、認識部61より出力されたオブジェクトObの位置情報に基づき俯瞰画像上におけるオブジェクトObの位置を特定する。続いて、認識部61より出力されたオブジェクトObの種類の情報に基づきオブジェクトObの奥行の長さを予測し、奥行の長さと、認識部61より出力されたオブジェクトの幅に基づき俯瞰画像上のオブジェクトの領域を計算する(図3B)。次に、オブジェクトObの位置、領域と、外界センサ2の検出可能範囲と、の幾何学的関係によりセンサの実検知範囲を算出する(図3B)。
Claims (10)
- 外界センサからの認識情報に基づき、車両の目標軌道を計画する車両制御システムであって、
前記認識情報に基づき、前記車両の周囲のオブジェクトを認識する認識部と、
該認識部が前記オブジェクトを認識した場合、前記外界センサの実検知範囲が広くなるような前記目標軌道を計画する軌道計画部と、
を具備する車両制御システムにおいて、
前記軌道計画部は、
前記認識情報に基づき前記車両の周囲の俯瞰画像を生成し、
該俯瞰画像上における、前記外界センサの検知可能な距離と、前記外界センサの検知可能な角度に基づき、前記外界センサの検知可能範囲を算出し、
該検知可能範囲における前記オブジェクトによって遮蔽されていない実検知範囲を算出することを特徴とする車両制御システム。 - 外界センサからの認識情報に基づき、車両の目標軌道を計画する車両制御システムであって、
前記認識情報に基づき、前記車両の周囲のオブジェクトを認識する認識部と、
該認識部が前記オブジェクトを認識した場合、前記外界センサの実検知範囲が広くなるような前記目標軌道を計画する軌道計画部と、
を具備する車両制御システムにおいて、さらに、
所定時間後の前記外界センサの実検知範囲と検知可能範囲の比である可視率が閾値未満と予測される場合、操舵制御を変更しない場合に到達する基準目標地点よりも前記オブジェクトから横方向に遠ざかる代替目標地点を設定する運転行動計画部を備えており、
前記軌道計画部は、前記運転行動計画部が設定した代替目標地点での前記可視率が前記閾値以上の場合、前記代替目標地点に向かう前記目標軌道を計画することを特徴とする車両制御システム。 - 外界センサからの認識情報に基づき、車両の目標軌道を計画する車両制御システムであって、
前記認識情報に基づき、前記車両の周囲のオブジェクトを認識する認識部と、
該認識部が前記オブジェクトを認識した場合、前記外界センサの実検知範囲が広くなるような前記目標軌道を計画する軌道計画部と、
を具備する車両制御システムにおいて、さらに、
所定時間後の前記外界センサの実検知範囲が閾値未満と予測される場合、操舵制御を変更しない場合に到達する基準目標地点よりも前記オブジェクトから横方向に遠ざかる代替目標地点を設定する運転行動計画部を備えており、
前記軌道計画部は、前記運転行動計画部が設定した代替目標地点での前記実検知範囲が前記閾値以上の場合、前記代替目標地点に向かう前記目標軌道を計画することを特徴とする車両制御システム。 - 外界センサからの認識情報に基づき、車両の目標軌道を計画する車両制御システムであって、
前記認識情報に基づき、前記車両の周囲のオブジェクトを認識する認識部と、
該認識部が前記オブジェクトを認識した場合、前記外界センサの実検知範囲が広くなるような前記目標軌道を計画する軌道計画部と、
を具備する車両制御システムにおいて、
前記外界センサの検知可能範囲は、複数の分割領域に分割され、各分割領域に重みが付与されており、前記軌道計画部は各分割領域の重みを考慮して前記目標軌道を計画することを特徴とする車両制御システム。 - 請求項2または請求項3に記載の車両制御システムにおいて、
前記閾値は環境に応じて変更されることを特徴とする車両制御システム。 - 請求項2または請求項3に記載の車両制御システムにおいて、
前記軌道計画部は、
前記閾値以上の前記目標軌道が存在する場合には、システム責任の自動運転を継続し、
前記閾値以上の前記目標軌道が存在しない場合には、前記システム責任の自動運転からドライバ責任の自動運転に切り替えることを特徴とする車両制御システム。 - 請求項6に記載の車両制御システムにおいて、さらに、
前記軌道計画部からの情報が入力されるHMI装置を備えており、
該HMI装置は、前記閾値以上の目標軌道が存在しない場合には、ドライバ責任の自動運転に切り替わることをドライバに報知すること特徴とする車両制御システム。 - 外界センサからの認識情報に基づき、車両の目標軌道を計画する車両制御システムであって、
前記認識情報に基づき、前記車両の周囲のオブジェクトを認識する認識部と、
該認識部が前記オブジェクトを認識した場合、前記外界センサの実検知範囲が広くなるような前記目標軌道を計画する軌道計画部と、
を具備する車両制御システムにおいて、
前記外界センサからの認識情報に基づき、死角領域から飛び出すオブジェクトを予測し、その予測結果と自車両の速度に基づき安全領域を算出し、
前記安全領域の可視率が100%になるような前記目標軌道を計画することを特徴とする車両制御システム。 - 請求項8に記載の車両制御システムにおいて、さらに、
前記軌道計画部は、
前記可視率が100%の前記目標軌道が存在する場合には、システム責任の自動運転を継続し、
前記可視率が100%の前記目標軌道が存在しない場合には、前記システム責任の自動運転からドライバ責任の自動運転に切り替えることを特徴とする車両制御システム。 - 請求項9に記載の車両制御システムにおいて、さらに、
前記軌道計画部からの情報が入力されるHMI装置を備えており、
該HMI装置は、前記可視率が100%の目標軌道が存在しない場合には、ドライバ責任の自動運転に切り替わることをドライバに報知すること特徴とする車両制御システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019232384A JP7295012B2 (ja) | 2019-12-24 | 2019-12-24 | 車両制御システム、および、車両制御方法 |
| DE112020005298.2T DE112020005298T5 (de) | 2019-12-24 | 2020-12-04 | Fahrzeugsteuersystem und fahrzeugsteuerverfahren |
| PCT/JP2020/045176 WO2021131597A1 (ja) | 2019-12-24 | 2020-12-04 | 車両制御システム、および、車両制御方法 |
| US17/787,703 US12311971B2 (en) | 2019-12-24 | 2020-12-04 | Vehicle control system, and vehicle control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019232384A JP7295012B2 (ja) | 2019-12-24 | 2019-12-24 | 車両制御システム、および、車両制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021100827A JP2021100827A (ja) | 2021-07-08 |
| JP7295012B2 true JP7295012B2 (ja) | 2023-06-20 |
Family
ID=76573975
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019232384A Active JP7295012B2 (ja) | 2019-12-24 | 2019-12-24 | 車両制御システム、および、車両制御方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12311971B2 (ja) |
| JP (1) | JP7295012B2 (ja) |
| DE (1) | DE112020005298T5 (ja) |
| WO (1) | WO2021131597A1 (ja) |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020152977A1 (ja) * | 2019-01-21 | 2020-07-30 | 日立オートモティブシステムズ株式会社 | 車両制御装置、車両制御方法、及び車両制御システム |
| FR3112746B1 (fr) * | 2020-07-23 | 2022-11-11 | Renault Sas | procédé de détermination d’une trajectoire d’un véhicule automobile |
| JP7446216B2 (ja) * | 2020-12-18 | 2024-03-08 | 日立Astemo株式会社 | 車両制御装置 |
| GB2604627B (en) * | 2021-03-10 | 2023-06-21 | Jaguar Land Rover Ltd | Weather-dependent driver assistance system |
| JP7674119B2 (ja) * | 2021-03-12 | 2025-05-09 | 株式会社Subaru | 運転支援装置及び記録媒体 |
| JP7619853B2 (ja) * | 2021-03-24 | 2025-01-22 | 株式会社Subaru | 運転支援装置 |
| JP7496797B2 (ja) * | 2021-03-29 | 2024-06-07 | 本田技研工業株式会社 | 軌道生成装置及び軌道生成方法 |
| JP2022182094A (ja) * | 2021-05-27 | 2022-12-08 | 本田技研工業株式会社 | 移動体制御装置、移動体制御方法、およびプログラム |
| US12012097B2 (en) * | 2021-07-29 | 2024-06-18 | Ford Global Technologies, Llc | Complementary control system for an autonomous vehicle |
| US12548342B2 (en) * | 2021-08-06 | 2026-02-10 | Hitachi Astemo, Ltd. | External environment recognition device |
| US11834077B2 (en) * | 2021-09-14 | 2023-12-05 | Barry Gilhuly | Systems, methods, and media for occlusion-aware motion planning |
| DE112021008280T5 (de) * | 2021-09-28 | 2024-08-29 | Honda Motor Co., Ltd. | Drehungssteuerungsvorrichtung für ein Motorrad |
| JP7828158B2 (ja) * | 2021-11-11 | 2026-03-11 | 古野電気株式会社 | 視界判定システム、視界判定方法、及びプログラム |
| JP2024543528A (ja) * | 2021-11-19 | 2024-11-21 | 華為技術有限公司 | 情報処理方法および情報処理装置 |
| DE112021008324T5 (de) * | 2021-12-01 | 2024-09-05 | Hitachi Astemo, Ltd. | Fahrassistenzvorrichtung und fahrassistenzverfahren |
| JP7720798B2 (ja) | 2022-01-31 | 2025-08-08 | 本田技研工業株式会社 | 移動体制御装置、移動体制御方法、およびプログラム |
| CN114852055B (zh) * | 2022-04-27 | 2024-05-24 | 重庆长安汽车股份有限公司 | 一种停车场环境下的危险行人感知认知方法及系统 |
| CN114969004B (zh) * | 2022-05-25 | 2025-10-28 | 阿里云计算有限公司 | 轨迹融合方法、装置、设备、介质及产品 |
| JP7796877B2 (ja) * | 2022-06-27 | 2026-01-09 | Astemo株式会社 | 車両制御装置及び車両制御方法 |
| JP7622714B2 (ja) * | 2022-08-23 | 2025-01-28 | トヨタ自動車株式会社 | 運転支援装置、運転支援方法 |
| US12051250B2 (en) * | 2022-09-19 | 2024-07-30 | Vellos Inc. | Situational awareness systems and methods and micromobility platform |
| JP2024043673A (ja) * | 2022-09-20 | 2024-04-02 | 株式会社Subaru | 運転支援装置、車両及びコンピュータプログラム |
| JP7743938B2 (ja) * | 2022-09-26 | 2025-09-25 | 日産自動車株式会社 | 運転支援方法及び運転支援装置 |
| JP7616189B2 (ja) * | 2022-10-17 | 2025-01-17 | トヨタ自動車株式会社 | 移動体制御システム及び移動体制御方法 |
| CN120712214A (zh) * | 2023-02-17 | 2025-09-26 | 株式会社电装 | 自动驾驶控制装置、自动驾驶控制程序、以及自动驾驶控制方法 |
| JP7677370B2 (ja) * | 2023-03-24 | 2025-05-15 | トヨタ自動車株式会社 | 車両制御システム |
| JP7831369B2 (ja) * | 2023-03-27 | 2026-03-17 | トヨタ自動車株式会社 | 車両 |
| FR3150627B1 (fr) * | 2023-06-28 | 2025-10-03 | Faurecia Clarion Electronics Europe | Procédé d’affichage |
| CN117022260A (zh) * | 2023-08-29 | 2023-11-10 | 中国第一汽车股份有限公司 | 安全驾驶辅助方法、装置、电子设备和存储介质 |
| CN119160178B (zh) * | 2024-11-20 | 2025-02-11 | 深圳市麦谷科技有限公司 | 一种车辆前向碰撞的控制方法以及存储介质 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019137189A (ja) | 2018-02-08 | 2019-08-22 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、およびプログラム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8798841B1 (en) * | 2013-03-14 | 2014-08-05 | GM Global Technology Operations LLC | System and method for improving sensor visibility of vehicle in autonomous driving mode |
| BR112017022775B1 (pt) * | 2015-04-23 | 2023-11-07 | Nissan Motor Co., Ltd | Dispositivo de controle de oclusão |
| JP6371329B2 (ja) | 2016-05-16 | 2018-08-08 | トヨタ自動車株式会社 | 車両の運転支援制御装置 |
| US10377380B2 (en) * | 2017-01-09 | 2019-08-13 | Denso International America, Inc. | Vehicle safety system |
| US11591018B2 (en) * | 2017-10-10 | 2023-02-28 | Aisin Corporation | Parking assistance device |
| DE102018218835B4 (de) * | 2018-11-05 | 2025-11-13 | Hyundai Motor Company | Verfahren zur zumindest teilweisen Entblockung eines Sichtfeldes eines Kraftfahrzeugs, insbesondere während Fahrspurwechseln |
| JP7163729B2 (ja) * | 2018-11-08 | 2022-11-01 | トヨタ自動車株式会社 | 車両制御装置 |
-
2019
- 2019-12-24 JP JP2019232384A patent/JP7295012B2/ja active Active
-
2020
- 2020-12-04 WO PCT/JP2020/045176 patent/WO2021131597A1/ja not_active Ceased
- 2020-12-04 US US17/787,703 patent/US12311971B2/en active Active
- 2020-12-04 DE DE112020005298.2T patent/DE112020005298T5/de active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019137189A (ja) | 2018-02-08 | 2019-08-22 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021100827A (ja) | 2021-07-08 |
| US12311971B2 (en) | 2025-05-27 |
| DE112020005298T5 (de) | 2022-10-27 |
| WO2021131597A1 (ja) | 2021-07-01 |
| US20230015466A1 (en) | 2023-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7295012B2 (ja) | 車両制御システム、および、車両制御方法 | |
| JP7435787B2 (ja) | 経路確認装置および経路確認方法 | |
| US10407061B2 (en) | Vehicle control system | |
| JP6380920B2 (ja) | 車両制御装置 | |
| US11370442B2 (en) | Vehicle control device and control method | |
| JP6380919B2 (ja) | 車両制御装置 | |
| JP7028131B2 (ja) | 報知装置 | |
| JP7163729B2 (ja) | 車両制御装置 | |
| JP6633041B2 (ja) | 車両、走行制御装置及び走行制御方法 | |
| JP6838525B2 (ja) | 車両制御装置 | |
| JP2019160032A (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| JP7379033B2 (ja) | 運転支援方法及び運転支援装置 | |
| US12515674B2 (en) | Vehicle control device for suppressing unnecessary lane-change operation | |
| JP7552918B2 (ja) | 車両制御方法及び車両制御装置 | |
| JP6656603B2 (ja) | 車両制御装置 | |
| JP7145178B2 (ja) | 走行制御装置、走行制御方法およびプログラム | |
| JP2020203587A (ja) | 自動運転システム | |
| JP2023088647A (ja) | 車両制御装置 | |
| JP6805767B2 (ja) | 車両制御システム | |
| EP4647310A1 (en) | Vehicle control device and vehicle control method | |
| JP6376520B2 (ja) | 車両制御装置 | |
| JP2023169524A (ja) | 車両の運転支援方法及び運転支援装置 | |
| KR20230089780A (ko) | 충돌 방지 방법 및 장치 | |
| JP7826768B2 (ja) | 運転支援方法及び運転支援装置 | |
| JP2021109576A (ja) | 車両の走行支援方法および走行支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220422 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230306 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230530 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230608 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7295012 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |