JP7300864B2 - 移動式目視検査システム - Google Patents
移動式目視検査システム Download PDFInfo
- Publication number
- JP7300864B2 JP7300864B2 JP2019061166A JP2019061166A JP7300864B2 JP 7300864 B2 JP7300864 B2 JP 7300864B2 JP 2019061166 A JP2019061166 A JP 2019061166A JP 2019061166 A JP2019061166 A JP 2019061166A JP 7300864 B2 JP7300864 B2 JP 7300864B2
- Authority
- JP
- Japan
- Prior art keywords
- ground
- visual inspection
- camera
- end effector
- relative
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64F—GROUND OR AIRCRAFT-CARRIER-DECK INSTALLATIONS SPECIALLY ADAPTED FOR USE IN CONNECTION WITH AIRCRAFT; DESIGNING, MANUFACTURING, ASSEMBLING, CLEANING, MAINTAINING OR REPAIRING AIRCRAFT, NOT OTHERWISE PROVIDED FOR; HANDLING, TRANSPORTING, TESTING OR INSPECTING AIRCRAFT COMPONENTS, NOT OTHERWISE PROVIDED FOR
- B64F5/00—Designing, manufacturing, assembling, cleaning, maintaining or repairing aircraft, not otherwise provided for; Handling, transporting, testing or inspecting aircraft components, not otherwise provided for
- B64F5/60—Testing or inspecting aircraft components or systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1694—Program controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F17/00—Digital computing or data processing equipment or methods, specially adapted for specific functions
- G06F17/10—Complex mathematical operations
- G06F17/16—Matrix or vector computation, e.g. matrix-matrix or matrix-vector multiplication, matrix factorization
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
- G07C5/0808—Diagnosing performance data
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/69—Control of means for changing angle of the field of view, e.g. optical zoom objectives or electronic zooming
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40298—Manipulator on vehicle, wheels, mobile
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30244—Camera pose
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Mathematical Physics (AREA)
- Mathematical Optimization (AREA)
- Pure & Applied Mathematics (AREA)
- Mathematical Analysis (AREA)
- Computational Mathematics (AREA)
- Data Mining & Analysis (AREA)
- Aviation & Aerospace Engineering (AREA)
- Transportation (AREA)
- Manufacturing & Machinery (AREA)
- Algebra (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Software Systems (AREA)
- Databases & Information Systems (AREA)
- Biochemistry (AREA)
- Immunology (AREA)
- Chemical & Material Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Analytical Chemistry (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
Description
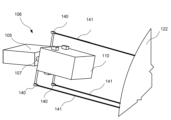
移動ベース(102)、
移動ベース(102)に連結された作動可能アーム(104)であって、三次元空間内で位置決め可能な作動可能アーム(104)、及び
作動可能アーム(104)に連結されたエンドエフェクタ(106)であって、構造物(122)の画像(126)を撮像するように構成されたカメラ(110)を備えるエンドエフェクタ(106)
を備える、地上設置型目視検査装置(100)と、
制御システム(150)であって、基準位置(125)に対するカメラ(110)の位置情報(128)を決定し、位置情報(128)を画像(126)に関連付けるように構成された制御システム(150)と、
を備える、地上設置型目視検査システム(50)。
基準位置(125)に対する移動ベース(102)の変換行列を計算することで、ベースの位置(162)を取得することと、
基準位置(125)に対する作動可能アーム(104)の変換行列を計算することで、アームの位置(164)を取得することと、
移動ベース(102)の変換行列と作動可能アーム(104)の変換行列とで変換行列の乗算を実施して、基準位置(125)に対するエンドエフェクタ(106)の変換行列を計算することと、
によって、基準位置(125)に対するカメラ(110)の位置を決定することで、位置情報(128)を決定するようにさらに構成されている、条項1に記載の地上設置型目視検査システム(50)。
位置合わせシステム(170)が、複数のレーザ式レンジファインダー(140)のデータに基づいて、構造物(122)に対するカメラ(110)の配向と距離を決定するように構成されており、
制御システム(150)が、配向情報(174)と距離情報(172)を画像(126)に埋め込むようにさらに構成されており、
制御システム(150)が、位置情報(128)を画像(126)内に埋め込むようにさらに構成されている、
条項1から11のいずれか一項に記載の地上設置型目視検査システム(50)。
移動ベース(102)、
移動ベース(102)に連結された作動可能アーム(104)であって、三次元空間内で位置決め可能な作動可能アーム(104)、
作動可能アーム(104)に連結されたエンドエフェクタ(106)であって、構造物(122)の画像(126)を撮像するように構成されたカメラ(110)を備えるエンドエフェクタ(106)、及び
制御システム(150)であって、基準位置(125)に対するカメラ(110)の位置情報(128)を決定するように構成された制御システム(150)、
を備える、地上設置型目視検査装置(100)。
構造物(122)の画像(126)をカメラ(110)で撮像すること(604)と、
基準位置(125)に対するベースの位置(162)、アームの位置(164)、及びエンドエフェクタの位置(166)を取得することで、基準位置(125)に対するカメラ(110)の位置情報(128)を決定すること(606)と、
位置情報(128)を画像(126)と関連付けること(608)と、
を含む方法(600)。
基準位置(125)に対する作動可能アーム(104)の変換行列を計算することで、アームの位置(164)を取得することと、
移動ベース(102)の変換行列と作動可能アーム(104)の変換行列とで変換行列の乗算を実施して、基準位置(125)に対するエンドエフェクタ(106)の変換行列を計算することと、
をさらに含む、条項17または18に記載の方法(600)。
距離情報(172)及び配向情報(174)を画像(126)と関連付けることと、
をさらに含む、条項17から19のいずれか一項に記載の方法(600)。
Claims (9)
- 構造物(122)検査用の地上設置型目視検査システム(50)であって、
移動ベース(102)、
前記移動ベース(102)に連結された作動可能アーム(104)であって、三次元空間内で位置決め可能な作動可能アーム(104)、及び
前記作動可能アーム(104)に連結されたエンドエフェクタ(106)であって、前記構造物(122)の画像(126)を撮像するように構成されたカメラ(110)を備えるエンドエフェクタ(106)
を備える、地上設置型目視検査装置(100)と、
制御システム(150)であって、基準位置(125)に対する前記カメラ(110)の位置情報(128)を決定し、前記位置情報(128)を前記画像(126)と関連付けるように構成された制御システム(150)と、
を備え、
前記制御システム(150)が、前記エンドエフェクタ(106)に連結された複数のレーザ式レンジファインダー(140)を備える位置合わせシステム(170)をさらに備える、地上設置型目視検査システム(50)。 - 前記制御システム(150)が、
前記基準位置(125)に対する前記移動ベース(102)の変換行列を計算することで、ベースの位置(162)を取得することと、
前記基準位置(125)に対する前記作動可能アーム(104)の変換行列を計算することで、アームの位置(164)を取得することと、
前記ベースの位置(162)と前記アームの位置(164)と前記作動可能アーム(104)の形状寸法とに基づいて、エンドエフェクタの位置(166)を計算することと、
によって、前記基準位置(125)に対する前記カメラ(110)の位置を決定することで、前記位置情報(128)を決定するようにさらに構成されている、請求項1に記載の地上設置型目視検査システム(50)。 - 前記位置合わせシステム(170)が、前記複数のレーザ式レンジファインダー(140)のデータに基づいて、前記構造物(122)に対する前記カメラ(110)の配向を決定するように構成されている、請求項1又は2に記載の地上設置型目視検査システム(50)。
- 前記制御システム(150)が、前記画像(126)内に前記位置情報(128)を埋め込むように構成されている、請求項1から3のいずれか一項に記載の地上設置型目視検査システム(50)。
- 前記位置情報(128)が、前記構造物(122)上の基準位置(125)に基づく、請求項1から4のいずれか一項に記載の地上設置型目視検査システム(50)。
- 前記位置合わせシステム(170)が、前記複数のレーザ式レンジファインダー(140)のデータに基づいて、前記構造物(122)に対する前記カメラ(110)の配向と距離を決定するように構成されており、
前記制御システム(150)が、配向情報(174)と距離情報(172)を前記画像(126)に埋め込むようにさらに構成されており、
前記制御システム(150)が、前記位置情報(128)を前記画像(126)内に埋め込むようにさらに構成されている、
請求項1から5のいずれか一項に記載の地上設置型目視検査システム(50)。 - 前記位置情報(128)が、基準ポジションからの並進変位と、前記基準位置(125)に対する前記移動ベース(102)の基準配向からの回転変位とを含む、請求項6に記載の地上設置型目視検査システム(50)。
- 地上設置型目視検査装置(100)であって、
移動ベース(102)、
前記移動ベース(102)に連結された作動可能アーム(104)であって、三次元空間内で位置決め可能な作動可能アーム(104)、
前記作動可能アーム(104)に連結されたエンドエフェクタ(106)であって、構造物(122)の画像(126)を撮像するように構成されたカメラ(110)を備えるエンドエフェクタ(106)、及び
制御システム(150)であって、基準位置(125)に対する前記カメラ(110)の位置情報(128)を決定するように構成された制御システム(150)、
を備え、
前記制御システム(150)が、前記エンドエフェクタ(106)に連結された複数のレーザ式レンジファインダー(140)を備える位置合わせシステム(170)をさらに備える、地上設置型目視検査装置(100)。 - 地上設置型目視検査装置(100)を構造物(122)と位置合わせすること(602)であって、前記地上設置型目視検査装置(100)が、移動ベース(102)、前記移動ベース(102)に連結された作動可能アーム(104)、前記作動可能アーム(104)に連結されたエンドエフェクタ(106)であって、カメラ(110)を備えるエンドエフェクタ(106)、及び前記エンドエフェクタ(106)に連結された複数のレーザ式レンジファインダー(140)を備える、地上設置型目視検査装置(100)を位置合わせすること(602)と、
前記構造物(122)の画像(126)を前記カメラ(110)で撮像すること(604)と、
基準位置(125)に対するベースの位置(162)、アームの位置(164)、及びエンドエフェクタの位置(166)を取得することで、前記基準位置(125)に対する前記カメラ(110)の位置情報(128)を決定すること(606)と、
前記位置情報(128)を前記画像(126)と関連付けること(608)と、
前記複数のレーザ式レンジファインダー(140)のデータに基づいて、前記構造物(122)に対する前記カメラ(110)の配向と距離を決定することと、
を含む方法(600)。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/945,640 US11238675B2 (en) | 2018-04-04 | 2018-04-04 | Mobile visual-inspection system |
| US15/945,640 | 2018-04-04 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019219378A JP2019219378A (ja) | 2019-12-26 |
| JP7300864B2 true JP7300864B2 (ja) | 2023-06-30 |
Family
ID=66041137
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019061166A Active JP7300864B2 (ja) | 2018-04-04 | 2019-03-27 | 移動式目視検査システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11238675B2 (ja) |
| EP (1) | EP3549874B1 (ja) |
| JP (1) | JP7300864B2 (ja) |
| CN (1) | CN110346367B (ja) |
| SG (1) | SG10201902558TA (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10974830B2 (en) * | 2017-12-28 | 2021-04-13 | Auror Flight Scienes Corporation | Manipulation system and method for an aircraft |
| US10717190B2 (en) * | 2018-04-19 | 2020-07-21 | Aurora Flight Sciences Corporation | End-effector for workpiece manipulation system |
| US10634632B2 (en) * | 2018-04-25 | 2020-04-28 | The Boeing Company | Methods for inspecting structures having non-planar surfaces using location alignment feedback |
| US11066838B2 (en) * | 2018-07-12 | 2021-07-20 | The Boeing Company | Work platform mover system |
| US11580800B2 (en) * | 2018-11-08 | 2023-02-14 | Verizon Patent And Licensing Inc. | Computer vision based vehicle inspection report automation |
| US11631283B2 (en) * | 2019-06-27 | 2023-04-18 | Toyota Motor North America, Inc. | Utilizing mobile video to provide support for vehicle manual, repairs, and usage |
| CN110654571B (zh) * | 2019-11-01 | 2023-10-20 | 西安航通测控技术有限责任公司 | 一种飞机蒙皮表面缺陷无损检测机器人系统及方法 |
| CN111498142B (zh) * | 2020-05-06 | 2021-12-14 | 南京航空航天大学 | 一种飞机航电成品安装校准方法 |
| CN111673407A (zh) * | 2020-05-20 | 2020-09-18 | 上海航天精密机械研究所 | 运载火箭贮箱箱底激光引导装配系统及方法 |
| US11631184B2 (en) | 2020-09-18 | 2023-04-18 | Spirit Aerosystems, Inc. | Feature inspection system |
| US20220092766A1 (en) * | 2020-09-18 | 2022-03-24 | Spirit Aerosystems, Inc. | Feature inspection system |
| CN112268548B (zh) * | 2020-12-14 | 2021-03-09 | 成都飞机工业(集团)有限责任公司 | 一种基于双目视觉的飞机局部外形测量方法 |
| CN112722318B (zh) * | 2021-01-18 | 2023-06-23 | 成都纵横鹏飞科技有限公司 | 一种无人机装配调试台架 |
| US11754507B2 (en) | 2021-04-05 | 2023-09-12 | Lockheed Martin Corporation | Workforce augmenting inspection device |
| US12391529B2 (en) * | 2021-04-09 | 2025-08-19 | The Boeing Company | Motion lockout for platform mover system |
| CN113280805B (zh) * | 2021-04-14 | 2023-03-17 | 中联重科股份有限公司 | 用于识别臂架姿态的方法、处理器、装置及工程机械 |
| CN113267497A (zh) * | 2021-05-18 | 2021-08-17 | 上海海事大学 | 生产线图像智能检测的机器硬件系统 |
| US12434858B2 (en) | 2021-07-12 | 2025-10-07 | The Boeing Company | Work platforms and methods of use |
| US11502729B1 (en) | 2021-08-10 | 2022-11-15 | The Boeing Company | Methods for through-structure power and data transfer between mobile robots and sensor nodes |
| WO2023034585A1 (en) * | 2021-09-03 | 2023-03-09 | Spirit Aerosystems, Inc. | Feature inspection system |
| US20230073587A1 (en) * | 2021-09-09 | 2023-03-09 | The Boeing Company | Automated volumetric image capture of an object to support general visual inspection |
| US11953309B2 (en) * | 2021-09-22 | 2024-04-09 | Lockheed Martin Corporation | Automated non-contact thickness inspection and projection system using color-coded based patterns |
| US12535318B2 (en) * | 2021-10-22 | 2026-01-27 | Mobile Industrial Robots A/S | Determining scanner error |
| US12196689B2 (en) * | 2022-01-10 | 2025-01-14 | The Boeing Company | Systems and methods for detecting anomalies in objects |
| CN114740492A (zh) * | 2022-03-11 | 2022-07-12 | 南京航空航天大学 | 一种大型复杂构件的移动式柔性测量系统及测量方法 |
| ES3056239T3 (en) * | 2022-11-30 | 2026-02-19 | Airbus Operations Gmbh | System and method for testing a surface of an aircraft or spacecraft |
| US20250071251A1 (en) * | 2023-08-22 | 2025-02-27 | Spirit Aerosystems, Inc. | System and method for locating and visualizing camera images in relation to a large-scale manufacturing product |
| DE102023124724B4 (de) * | 2023-09-13 | 2025-05-15 | Ipek International Gmbh | Kanalinspektions- und/oder Wartungssystem |
| US20250104275A1 (en) * | 2023-09-22 | 2025-03-27 | The Boeing Company | System and method for establishing the position of a tool relative to a structure |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012145381A (ja) | 2011-01-07 | 2012-08-02 | Toyota Central R&D Labs Inc | 3次元座標計測装置 |
| US20150116481A1 (en) | 2013-10-29 | 2015-04-30 | The Boeing Company | Mapping damaged regions on objects |
| JP2016016860A (ja) | 2014-07-09 | 2016-02-01 | ザ・ボーイング・カンパニーTheBoeing Company | フレキシブル製造システムを動作させるための計測にもとづくシステム |
| US20160264262A1 (en) | 2013-10-24 | 2016-09-15 | Airbus Group Sas | Collaborative robot for visually inspecting an aircraft |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0724585U (ja) * | 1993-09-29 | 1995-05-09 | 株式会社明電舎 | ワークハンドリング装置 |
| JP3318882B2 (ja) * | 1994-07-22 | 2002-08-26 | 本田技研工業株式会社 | 光学式測定装置及び測定方法 |
| CN1219397C (zh) * | 2002-10-22 | 2005-09-14 | 张晓林 | 仿生型自动视觉和视线控制系统及方法 |
| US7194358B2 (en) | 2004-02-25 | 2007-03-20 | The Boeing Company | Lift collision avoidance system |
| JP4734120B2 (ja) | 2006-01-06 | 2011-07-27 | 株式会社東芝 | 航空機機体の検査方法および装置 |
| US8044991B2 (en) * | 2007-09-28 | 2011-10-25 | The Boeing Company | Local positioning system and method |
| US8428781B2 (en) * | 2008-11-17 | 2013-04-23 | Energid Technologies, Inc. | Systems and methods of coordination control for robot manipulation |
| US9031734B2 (en) | 2010-09-29 | 2015-05-12 | Aerobotics, Inc. | Systems and methods for non-destructive inspection of airplanes |
| US9142062B2 (en) * | 2011-03-29 | 2015-09-22 | Qualcomm Incorporated | Selective hand occlusion over virtual projections onto physical surfaces using skeletal tracking |
| US8713998B2 (en) * | 2011-06-14 | 2014-05-06 | The Boeing Company | Autonomous non-destructive evaluation system for aircraft structures |
| US9310317B2 (en) * | 2012-01-25 | 2016-04-12 | The Boeing Company | Automated system and method for tracking and detecting discrepancies on a target object |
| US10162796B2 (en) * | 2012-12-31 | 2018-12-25 | General Electric Company | Inspection systems and methods |
| US9285296B2 (en) * | 2013-01-02 | 2016-03-15 | The Boeing Company | Systems and methods for stand-off inspection of aircraft structures |
| KR101374802B1 (ko) * | 2013-03-29 | 2014-03-13 | 이철희 | 농업용 로봇시스템 |
| US9395339B2 (en) | 2013-08-26 | 2016-07-19 | The Boeing Comapany | Apparatus for non-destructive inspection of stringers |
| US10310054B2 (en) * | 2014-03-21 | 2019-06-04 | The Boeing Company | Relative object localization process for local positioning system |
| US9834323B2 (en) * | 2014-05-16 | 2017-12-05 | The Boeing Company | Automated scanning systems for non-destructive inspection of curved cylinder-like workpieces |
| US9664652B2 (en) * | 2014-10-30 | 2017-05-30 | The Boeing Company | Non-destructive ultrasonic inspection apparatus, systems, and methods |
| US9506744B2 (en) * | 2014-12-16 | 2016-11-29 | Faro Technologies, Inc. | Triangulation scanner and camera for augmented reality |
| US9645012B2 (en) * | 2015-08-17 | 2017-05-09 | The Boeing Company | Rapid automated infrared thermography for inspecting large composite structures |
| DE102015120660A1 (de) | 2015-11-27 | 2017-06-01 | Airbus Defence and Space GmbH | Luftfahrzeuginspektionssystem |
| US9753461B1 (en) * | 2016-04-07 | 2017-09-05 | Google Inc. | Autonomous aerial cable inspection system |
| US10065313B2 (en) * | 2016-12-07 | 2018-09-04 | Harris Corporation | Robot manipulator system |
| US10814480B2 (en) | 2017-06-14 | 2020-10-27 | The Boeing Company | Stabilization of tool-carrying end of extended-reach arm of automated apparatus |
| US10625427B2 (en) | 2017-06-14 | 2020-04-21 | The Boeing Company | Method for controlling location of end effector of robot using location alignment feedback |
| US10788428B2 (en) | 2017-09-25 | 2020-09-29 | The Boeing Company | Positioning system for aerial non-destructive inspection |
| US10791275B2 (en) | 2017-09-25 | 2020-09-29 | The Boeing Company | Methods for measuring and inspecting structures using cable-suspended platforms |
| US11401051B2 (en) | 2018-02-19 | 2022-08-02 | The Boeing Company | Aircraft inspection systems and methods |
-
2018
- 2018-04-04 US US15/945,640 patent/US11238675B2/en active Active
-
2019
- 2019-03-01 CN CN201910153896.XA patent/CN110346367B/zh active Active
- 2019-03-21 SG SG10201902558T patent/SG10201902558TA/en unknown
- 2019-03-27 JP JP2019061166A patent/JP7300864B2/ja active Active
- 2019-03-27 EP EP19165608.1A patent/EP3549874B1/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012145381A (ja) | 2011-01-07 | 2012-08-02 | Toyota Central R&D Labs Inc | 3次元座標計測装置 |
| US20160264262A1 (en) | 2013-10-24 | 2016-09-15 | Airbus Group Sas | Collaborative robot for visually inspecting an aircraft |
| US20150116481A1 (en) | 2013-10-29 | 2015-04-30 | The Boeing Company | Mapping damaged regions on objects |
| JP2016016860A (ja) | 2014-07-09 | 2016-02-01 | ザ・ボーイング・カンパニーTheBoeing Company | フレキシブル製造システムを動作させるための計測にもとづくシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| SG10201902558TA (en) | 2019-11-28 |
| EP3549874B1 (en) | 2022-12-21 |
| JP2019219378A (ja) | 2019-12-26 |
| EP3549874A1 (en) | 2019-10-09 |
| CN110346367A (zh) | 2019-10-18 |
| US11238675B2 (en) | 2022-02-01 |
| US20190311555A1 (en) | 2019-10-10 |
| CN110346367B (zh) | 2024-05-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7300864B2 (ja) | 移動式目視検査システム | |
| US11584525B2 (en) | Deep learning-based localization of UAVs with respect to nearby pipes | |
| US10625427B2 (en) | Method for controlling location of end effector of robot using location alignment feedback | |
| KR101988083B1 (ko) | 가동 타겟 오브젝트의 위치 탐색을 위한 시스템 및 방법 | |
| US10814480B2 (en) | Stabilization of tool-carrying end of extended-reach arm of automated apparatus | |
| CN107240063B (zh) | 一种面向移动平台的旋翼无人机自主起降方法 | |
| CN111837136B (zh) | 基于本地感测的自主导航以及相关联的系统和方法 | |
| JP6735821B2 (ja) | Uav経路を計画し制御するシステム及び方法 | |
| Chen et al. | Qualitative vision-based path following | |
| CN105486311B (zh) | 室内机器人定位导航方法及装置 | |
| CN108351654B (zh) | 用于视觉目标跟踪的系统和方法 | |
| KR20210109529A (ko) | 파이프에 uav 착지를 위한 자동화 방법 | |
| JP2022554248A (ja) | 無人飛行体を使用する構造体スキャン | |
| WO2018053861A1 (en) | Methods and system for vision-based landing | |
| JP2018105846A (ja) | 無人航空輸送体を使用する非破壊試験のための方法及びシステム | |
| JP4980606B2 (ja) | 移動型自動監視装置 | |
| CN110637264A (zh) | 确定沿着对象的路径的方法、用于自动检查对象的系统及方法 | |
| US12585292B2 (en) | Location based change detection within image data by a mobile robot | |
| WO2011076221A2 (en) | Method for provision of a series of digital images | |
| Gabdullin et al. | Analysis of onboard sensor-based odometry for a quadrotor uav in outdoor environment | |
| CN118089653A (zh) | 一种免接触的无人机杆塔高程测量方法 | |
| Narumi et al. | Indoor visualization experiments at building construction site using high safety UAV | |
| US20160173859A1 (en) | Imaging system mounted in flight vehicle | |
| CN115476362B (zh) | 移动操作机器人定位引导方法 | |
| Clift et al. | Determining positions and distances using collaborative robots |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220318 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230307 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230510 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230523 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230620 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7300864 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |