以下、実施形態を図面に基づいて説明する。なお、以下の実施形態において、互いに同一もしくは均等である部分には、図中、同一符号を付しており、同一符号の部分についてはその説明を援用する。
<第1実施形態>
本実施形態に係る誘引具10は、図1に示すように、植物100が植えられた耕作地で用いられるものである。この植物としては、本実施形態では、トマトを想定している。この耕作地では、植物100は、ひとつの方向に向けて一列に植えられており、その上方には、植物100が植えられた方向と平行となるように、軌道101が設けられている。より具体的には、この軌道101は、植物100の植えられた方向と平行な一対の直線部分と、その直線部分の両端どうしをそれぞれ結ぶ一対の円弧状の部分有する略長円形状である。本実施形態に係る誘引具10は、その軌道101に取り付けられ、軌道101に沿って走行する。そして、誘引具10が備える誘引紐11を植物の茎に括り付け、植物100の茎を斜め上方へと誘引する。なお、以下の説明では、植物100が植えられている方向を左右方向と定義し、天地の方向を上下方向と定義し、左右方向及び上下方向のいずれに対しても垂直な方向を前後方向と称する。
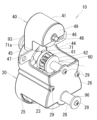
まず、図2~8を参照して、誘引具10の構造について説明する。誘引具10は後述する駆動機構等を収容する本体ケース20を備えている。本体ケース20は、前後方向に略一定の厚みを有する2つの円の一部が上下で重複した略双円形状の背面部21を備えている。その背面部21の右側面には、前方へ向けて垂直に延び、前後方向の高さが略均一であり、且つ一定の厚みを有する右壁部22が設けられている。一方、背面部21の左側面には、前方へ向けて垂直に延び、前後方向の高さが略均一であり、且つ一定の厚みを有する左壁部23が設けられている。これら右壁部22及び左壁部23の上端どうしの位置及び下端どうしの位置は等しい。これら右壁部22及び左壁部23の上端どうしは、背面部21から前方へ垂直に延び、前後方向の高さが略均一であり、且つ一定の厚みを有する上壁部24より接続されている。一方、右壁部22及び左壁部23の下端どうしは、背面部21から前方へ垂直に延び、前後方向の高さが略均一であり、且つ一定の厚みを有する下壁部25より接続されている。
以上のように外形が構成される本体ケース20の正面には、板状の第1カバー26が取り付け可能であり、その第1カバー26により本体ケース20の一部が正面視にて遮蔽される。この第1カバー26の上端近傍には、背面側へ突出した円筒状の上側凸部27が設けられており、下端近傍には、正面側へ突出した円筒状の下側凸部28が設けられている。また左右端近傍にも孔(図示略)が設けられており、上側凸部27、下側凸部28及び左右端近傍に設けられた孔にビス29が挿入され、本体ケース20に取り付けられる。
この本体ケース20の背面部21には、前後方向に貫通した孔であり背面側へと突出した円筒部を有する第1開口31が設けられている。この第1開口31において、円筒部の背面側端部には、縮径された内側フランジが形成されている。この第1開口31の右斜め下方には、前後方向に貫通した孔であり背面側へと突出した円筒部を有する第2開口32が設けられている。第1開口31の直下であり、且つ、第2開口32の左斜め下方には、前後方向に貫通した孔であり背面側へと突出した円筒部を有する第3開口33が設けられている。これら第1~第3開口31~33の内径は等しい。さらに、第1開口26の真上には、前後方向に貫通した孔であり背面側へと突出した円筒部を有する第4開口34が設けられている。この第4開口34の内径は、第1~第3開口31~33の内径よりも大きい。また、第4開口34の円筒部の背面側端部には、縮径された内側フランジ34aが形成されている。
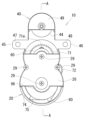
本体ケース20の上部には、補助ケース40が設けられている。この補助ケース40は、厚みが略均一であり上端が弧状に湾曲した外周壁41と、外周壁41内を前側と後側に区画する、厚みが略均一な区画壁42により構成されている。この区画壁42の略中央には、前後方向に貫通する第5開口43が設けられている。この第5開口43には、補助ローラ44が前後方向に延びる軸回りに回転可能に取り付けられる。
本体ケース20と補助ケース40との接続箇所近傍には、左右方向へそれぞれ張り出した連結部45,46が設けられている。連結部45,46は、前後方向に所定の厚みを有する板状であり、前後方向に貫通する円形の孔である連結孔47,48がそれぞれに設けられている。以上のように外形が構成される補助ケース40の正面には、板状の第2カバー49が取り付け可能であり、その第2カバー49により補助ケース40の一部が正面視にて遮蔽される。
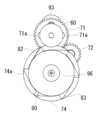
本体ケース20の第1開口31には、円柱形の第1回転軸51が挿入されて取り付けられている。この第1回転軸51の前方側には、円形の走行ローラ60が、第1回転軸51を中心とし第1回転軸51周りに回転可能に取り付けられている。この走行ローラ60は、複数の歯が等間隔に全周に亘って設けられている走行歯車61と、その走行歯車61の前後のそれぞれに設けられた、走行歯車61と中心を共有し直径が走行歯車61の直径と略同等の円盤状である、一対のガイド部62を有している。
この走行ローラ60の背面側には、走行ローラ60と同様に第1回転軸51を中心とし、走行ローラ60の回転に伴い第1回転軸51周りに回転する円板状の第1歯車71が取り付けられている。この第1歯車71には前後方向(厚み方向)に貫通した円形の孔である係止孔71aが形成されている。この係止孔71aは、第1歯車71の周方向において等間隔に4つ形成されており、係止孔71aの中心を通る仮想円の外周は、本体ケース20に設けられた第4開口34の中心を通る。また、係止孔71aの直径は、本体ケース20に設けられた第4開口34の直径よりも小さく、第4開口34の内側フランジ34aの内径と略同径である。
本体ケース20の第2開口32には、円柱形の第2回転軸52が挿入されて取り付けられている。この第2回転軸52には、円板状の第2歯車72が、第2回転軸52を中心とし第2回転軸52周りに回転可能に取り付けられている。この第2歯車72の直径は、第1歯車71と係合可能な直径であり、第2歯車72の歯の形状は第1歯車71の歯の形状と略等しい。
本体ケース20の第3開口33には、円柱形の第3回転軸53が挿入されて取り付けられている。この第3回転軸53には、円板状の第3歯車73が、第3回転軸53を中心とし第3回転軸53周りに回転可能に取り付けられている。この第3歯車73の直径は、第2歯車72と係合可能な直径であり、第3歯車73の歯の形状は第2歯車72の歯の形状と略等しい。
第3歯車73の正面側には、第3回転軸53を中心とする円板状の回転板74が設けられている。この回転板74は、第3歯車73の回転に伴い第3回転軸53周りに回転する。この回転板74の正面には、正面側から背面側へ向けて窪んだ窪部75が設けられている。この窪部75は前後方向の深さが略均一であり、正面視での形状は、円の周囲に同一方向へと傾斜した同形状の鋸歯が複数設けられている形状である。
回転板74の正面側には、ボビン80が、第3回転軸53を中心として第3回転軸53周りに回転可能に取り付けられている。ボビン80は、第3回転軸53の延長線を中心軸とする円柱形の軸81と、軸81の背面側の端部に設けられた板状の第1鍔82と、軸81の正面側の端部に設けられた板状の第2鍔83と、第2鍔83の中心から正面側へ向けて突出した円柱形の凸部84を備えている。第1鍔82は、略円板状であり、外周には、回転板74の窪部75が有する鋸歯と略同形状の突起が一つ形成されている。第2鍔83は、軸81と中心を共有する円板状である。
このボビン80には、誘引紐11の一端が固定されている。そして、その誘引紐11は、正面から見てボビン80が反時計回りに回転した場合に繰り出され、ボビン80が時計回りに回転したら巻き上げられるように、ボビン80の軸81に巻き付けられている。この誘引紐11の素材としては、例えば、ステンレス等の金属、合成樹脂、天蚕糸、人造天蚕糸、綿、その他の繊維等が挙げられる。
本体ケース20の第4開口34には、円柱形の係止ピン91が正面側から挿入されている。この係止ピン91の直径は、第1歯車71に設けられた係止孔71aの直径と略等しい。係止ピン91には、長手方向の中央よりもやや前方よりには、大径化された大径部91aが設けられている。この大径部91aの直径は、本体ケース20の第4開口34の直径と略等しく、大径部91aの外周面が第4開口34の内周面に当接する。第4開口34の内側フランジ34aと係止ピン91の大径部91aとの間には、スプリング92が設けられており、そのスプリング92が係止ピン91を前方に向けて付勢している。すなわち、係止ピン91は、スプリング92により係止孔71aに嵌入された状態が維持され、それにより、第1歯車71とその第1歯車71と同調して回転する走行ローラ60の回転が抑制される。係止ピン91の背面側の端部には、第4開口34の円筒の外周よりも大径の円板93がねじ止めされている。
本体ケース20の正面には、上述した第1カバー26が取り付けられる。このとき、ボビン80の凸部84には、筒状の押え部94が正面側から取り付けられている。押え部94はスプリング95を介して下側凸部28内に挿入されており、押え部94はスプリング95により、ボビン80を背面側へ押さえつけるように付勢されている。また、押え部94には、下側凸部28の正面側において、下側凸部28の外径よりも大径の円板96がねじ止めされている。
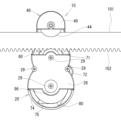
以上のように構成される誘引具10は図13に示すように軌道101に取り付けられ、軌道101に沿って走行する。この軌道101は、左右方向に延び、前後方向の厚みが一定な長尺板状である。軌道101の上端は、地表面に対して水平な直線状である。一方、軌道101の下端には、誘引具10の走行ローラ60の走行歯車61に設けられている歯と略同形状の歯102が、長手方向の全域に亘って設けられている。軌道101に誘引具10を取り付ける場合には、軌道101の上端に補助ローラ44が当接し、軌道101の歯102に走行ローラ60の走行歯車61が係合する。
誘引具10が軌道101に沿って走行する場合、軌道101の歯102がラックとして機能し、誘引具10の走行歯車61がピニオンとして機能する。すなわち、誘引具10の左右方向の移動に伴って走行歯車61が回転する。このとき、係止ピン91の背面側端部にねじ止めされている円板93を背面側へと引っ張り、係止ピン91の係止孔71aから離脱させ、走行ローラ60を回転可能とする。誘引具10が軌道に沿って左から右へと移動する場合、走行歯車61は正面から見て反時計周りに回転する。走行歯車61と共に第1歯車71も反時計回りに回転し、その第1歯車71と係合している第2歯車72は時計回りに回転する。第2歯車72が時計回りに回転することで、第2歯車72と係合する第3歯車73は正面から見て反時計回りに回転し、その回転に同調してボビン80も反時計回りに回転する。すなわち、ボビン80は、誘引紐83を繰り出す方向へと回転する。
以上の動きを簡略にまとめると、誘引具10が軌道101上を左から右へと走行する場合、走行ローラ60の回転を、第1歯車71、第2歯車72、及び第3歯車73により、ボビン80により誘引紐11を繰り出す動力へと変換する。なお、第1歯車71、第2歯車72、及び第3歯車73は走行ローラ60の回転とボビン80の回転とを連動させるものであるため、纏めて連動機構と称することができる。
誘引具10を軌道101上で停止させる場合には、係止ピン91に取り付けられている円板93を背面側へと引っ張った状態を解除し、スプリング92の付勢力により、係止ピン91を係止孔71に嵌入させる。これにより第1歯車71とその第1歯車71と同調して回転する走行ローラ60の回転が抑制される。係止ピン91及び係止孔71は、このように走行ローラ60の回転を抑制するため、纏めて抑制手段と称することができる。なお、この係止ピン91については、係止孔71から離脱させた状態を維持可能な構造を有していてもよい。
また、ボビン80は、走行ローラ60の回転と同調させずに回転させることができる。具体的には、円板96を正面側へと引っ張ることにより、ボビン80に対して背面側に向けて押圧している押え部94を、ボビン80から離間させる。こうすることで、ボビン80を正面側へ向けて移動させることができ、これにより、ボビン80の第1鍔82の突起が回転板74の窪部75から離脱し、ボビン80の回転と回転板74の回転との連動が遮断される。この状況において、誘引紐11の繰り出し量が過剰であるならば、ボビン80を時計回りに回転させて誘引紐11を巻き上げればよいし、誘引紐11の繰り出し量が過少であるならば、ボビン80を反時計回りに回転させて誘引紐11を繰り出せばよい。こうすることで、走行ローラ60を回転させることなくボビン80を回転させることができるため、誘引具10の軌道101上の位置を変化させることなく誘引紐11の繰り出し量を変更できる。
なお、誘引具10を軌道101に沿って右から左へと逆走させる場合には、ボビン80は正面から見て時計回りに回転し、誘引紐83を巻き取る。
続いて、以上説明した誘引具10を複数備える誘引装置の使用方法について、図13及び図14を参照して説明する。まず、軌道101上に誘引具10を直列に取り付け、左右方向で隣接する誘引具10どうしを、可撓性を有するロープ103により連結する。このロープ103は、誘引具10に設けられた連結孔46,47に挿入されることで取り付けられる。
図1に戻り、以上のように連結された誘引具10について、左側から第1誘引具10、第2誘引具10a、第3誘引具10bと称するものとし、正面視にて軌道に沿って左から右へ走行するものとする。この場合に、第2誘引具10a及び第3誘引具10bについては、係止ピン91等の走行ローラ60の回転を抑制する部材を備えていない。また、第1誘引具10と第2誘引具10aとを連結するロープ103を第1連結部材と称することができ、第2誘引具10aと第3誘引具10bとを連結するロープ103を第2連結部材と称することができる。
図1に示すように、第1誘引具10、第2誘引具10a、第3誘引具10bをそれぞれ植物100の苗の上に配置し、誘引紐11を植物100の苗に括り付ける。植物100が成長し、茎が伸びてきたら、第1誘引具10aにおける係止ピン91による回転ローラ60の回転を一時的に解除し、第1誘引具10aを必要な分だけ右側へと移動させる。その移動に伴い、誘引紐11は繰り出され、植物100の茎を誘引具10,10a,10bの走行方向へと誘引する。
第1誘引具10を必要な分だけ移動させたら、係止ピン91を係止孔71aに挿入して、走行ローラ60の回転を抑制する。このとき、走行ローラ60が備える走行歯車61と軌道101の歯102との係合状態は維持されているため、走行ローラ60の回転が抑制されることで、第1誘引具10の左右方向への移動も抑制される。
続いて、第2誘引具10a及び第3誘引具10bを右側へと移動させる。この場合に、第3誘引具10bを右側へと移動させれば第2誘引具10aも引っ張られて右側へと移動する。そして、第2誘引具10a及び第3誘引具10bが第1誘引具10と同じ分だけ右側へと移動すれば、ロープ103が伸び切り、第2誘引具10a及び第3誘引具10bのそれ以上の右側への移動が抑制される。
なお、植物100により誘引紐11には繰り出される方向へと荷重がかかるため、誘引紐11が繰り出されることで第2誘引具10a及び第3誘引具10bが右方向へと走行する場合がある。この場合には、第2誘引具10a及び第3誘引具10bについては、右側へと移動させる操作を行わなくてもよい。
また、第2誘引具10a及び第3誘引具10bが第1誘引具10と同等の構成のボビン80等を備えていれば、第2誘引具10a及び第3誘引具10bについても、軌道101上の位置を変更することなく、誘引紐11の繰り出し量を変更できる。すなわち、各誘引具10,10a,10bの相対位置を変更することなく、個別に誘引紐11の繰り出し量を変更することができる。
以上の説明において、第2誘引具10a及び第3誘引具10bについて、互いに異なる名称を付与しているが、上述した通り、第2誘引具10aと第3誘引具10bとは配置される順番が異なるのみであり構造は同一である。したがって、第2誘引具10aと第3誘引具10bとを備えるものと称する代わりに、複数(2つ)の第2誘引具10aを備えると称することもできる。そして、本実施形態では、複数の第2誘引具10aが互いに可撓性を有する第2連結部材であるロープ103により連結されて列をなし、複数の第2誘引具10aのうちの最も第1誘引具10側に位置する第2誘引具10aが、可撓性を有する第1連結部材である可撓性を有するロープ103により第1誘引具10に連結されている、という発明を開示しているということができる。
上記構成により、本実施形態に係る誘引具10及び、その誘引具10,10a,10bを複数備える誘引装置は、以下の効果を奏する。
・誘引具10を軌道101上で停止させた場合に、誘引具10の走行ローラ60が備える走行歯車61が軌道101の歯102に係止状態であるため、誘引紐11への荷重等により走行ローラ60に誘引方向へ向かう力が加わったとしても、走行ローラ60の誘引方向への移動が抑制される。したがって、誘引具10の誘引方向への不要な移動を抑制することができる。
・誘引具10の走行時には、走行ローラ60の走行歯車61と軌道101の歯102とが噛み合いながら走行するため、走行時の走行ローラ60の空転を抑制することができる。
・植物を栽培する場合には、複数の植物を間隔を空けて栽培することが一般的であるため、複数の誘引具10も必要となる。すなわち、複数の誘引具10のそれぞれに係止ピン91等の走行を抑制する手段が必要であるうえに、それぞれの係止ピン91を操作するという作業が必要となる場合がある。この点、本実施形態では、第1誘引具10が係止孔71aと係止ピン91とで構成される抑制手段により走行を抑制することで、第2誘引具10a及び第3誘引具10bの走行を抑制するため、第2誘引具10a及び第3誘引具10bの構成を第1誘引具10の構成よりも簡略化できるうえに、第2誘引具10a及び第3誘引具10bに対する走行を抑制する操作を省略することができる。
<第2実施形態>
本実施形態に係る誘引装置は、構成の一部が第1実施形態と異なっている。本実施形態に係る誘引装置について、図15を参照して説明する。誘引装置は、誘引具110及び軌道101を備えており、軌道101の形状は、第1実施形態と同等の形状である。一方、誘引具110は、第1実施形態に係る誘引具10と異なり、係止ピン91等の走行ローラ60の回転を抑制する部材を備えていない。なお、図15では、誘引具110の背面を図示しており、誘引具110は右から左へと走行するものとし、誘引具110の左側(進行方向側)には同形状の誘引具(図示略)がロープ103により接続されている。
誘引装置は、さらに、制御装置120、繰り出し装置130、ワイヤー140を備えている。繰り出し装置130は、ボビン131や、そのボビンを回転させるモータ(図示略)、モータに駆動電力を供給する電源(図示略)等を備えており、制御装置130から電源へ制御信号が送信されることで、モータが駆動してボビンが回転131する。ワイヤー140は可撓性を有しており、繰り出し装置130のボビンに一方の端部側が巻き付けられており、他方の端部は、誘引具110の進行方向とは反対側の連結孔46に挿入されて取り付けられている。そして、繰り出し装置130のボビン131が回転することでワイヤー140の繰り出し/巻き上げが行われる。また、モータが駆動していない場合には、ボビン131の回転は抑制される。なお、ワイヤー140は誘引具110の走行を抑制するものであるため、制動部材と称することができる。ボビン131はそのワイヤー140を繰り出す繰り出し機構と称することができ、繰り出し装置130は、そのボビン131を作動させる制御機構と称することができる。
制御装置120は繰り出し装置130へ制御信号を送信し、ボビン131を回転させワイヤー140を繰り出したり巻き戻したりする。制御装置120は、制御部121、通信部122、記憶部123、及び駆動部124を備えている。制御部121は、プログラムに従って各種の処理を行う。通信部122は、通信回線等に接続されており、その通信回線を利用して外部のサーバ等と通信を行い、各種の情報を取得する。記憶部123は、制御部121が各種処理を行う際のワークエリアとして機能する揮発性の記憶装置、及び、各種の情報及びプログラムを記憶する不揮発性の記憶装置を含んで構成されている。駆動部124は、制御装置121による各種処理に基づいて、繰り出し装置130を駆動させる制御信号を生成し、繰り出し装置130へその制御信号を出力する。なお、繰り出し装置130を制御機構と称するものとしているが、制御機構という概念に制御装置120を含めてもよい。
制御部121は、記憶装置123に記憶されている人工知能を構成するプログラムを読み出して実行する。そして、過去に栽培された植物の栽培時の環境に関する情報(以下、「環境情報」という。)、及び、第1実施形態に係る誘引具10の走行量及び/又は誘引紐11の繰り出し量(以下、「生育情報」という。)を取得して教師データとして機械学習を行い、その機械学習により、環境情報と生育情報との相関関係を求める。この処理は、環境情報と生育情報とを取得した場合に、随時行われる。このようにして機械学習により環境情報と生育情報との相関関係が求められれば、その相関関係を記憶部123に記憶しておく。
環境情報としては、過去の日照時間、気温、湿度等の気象情報、露地栽培であるかビニールハウス栽培であるかの違い、使用する肥料の種類及び量等、すなわち植物の育成状況を左右する情報が挙げられる。生育情報は、過去に第1実施形態に係る誘引具10を人が操作した場合の、誘引具10の走行量及び/又は誘引紐11の繰り出し量である。これらの環境情報は生育情報と関連付けられている。すなわち、誘引具を走行させた日の生育情報と、その日の環境情報とが関連付けられている。この関連付けは、植物の栽培開始から連日にわたって行われていれば、情報の信頼度が増す。
本実施形態に係る誘引装置で植物を誘引する場合には、現在栽培されている誘引対象の植物が置かれている日照時間、気温、湿度等の気象情報、露地栽培であるかビニールハウス栽培であるかの違い、使用されている肥料の種類及び量等の情報を取得する。このとき、当日のみに関する情報を用いてもよいし、過去数日の情報も用いてもよいし、栽培開始から現在までの育成状況に関する情報も用いてもよい。また、気象情報を用いるのであれば、気象予報を用いてもよい。そして、環境情報と生育情報との相関関係に基づいて誘引具110の走行量を求め、繰り出し装置130を駆動させてワイヤー140を繰り出す。このワイヤー140を繰り出す制御に関しては、1日のうちに1回~数回、予め定められた時刻に必要な繰り出し量だけ繰り出すようにしてもよいし、必要な繰り出し量が一定の量に到達するごとに、その繰り出し量の分だけ繰り出すようにしてもよい。
上記構成により、本実施形態に係る誘引装置は以下の効果を奏する。
・植物は、日照時間や気温等に応じて生育状態が変化するものであり、生育状態に応じてワイヤー140を繰り出す必要がある。本実施形態では、人工知能を用いて環境情報と生育情報との相関関係を求め、現在の環境情報等に基づいてワイヤー140を繰り出しているため、誘引具110をより好適な位置に配置することができる。
・人が誘引紐11の繰り出し量を変更する場合、人は植物の生育情報を確認しながら誘引具110の位置を変更するため、環境情報と人為的な繰り出し量とを関連付けることで、誘引具110をより好適な位置に配置することができる。
・ワイヤー140の繰り出し操作を行う場合、繰り出しが必要となるごとに繰り出し操作を行うのであれば、繰り出し操作を頻繁に行う必要があり、より精細な制御が必要となったり、構成が複雑化したりする。この点、本実施形態では、時刻及び前回繰り出し量を変更してからの経過時間の少なくとも一方に基づいてワイヤー140の繰り出しを行うため、より精細な制御や頻繁な制御が必要とならないような時刻又は時間に基づいて、ワイヤー140の繰り出しを行うことができる。
<第3実施形態>
本実施形態に係る誘引装置は、第2実施形態に対して構成が一部追加されており、制御装置120の制御部121が実行する処理の一部が異なっている。本実施形態に係る制御装置は、植物100から誘引紐11へ印加される荷重を検出するセンサ(図示略)をさらに備えている。このセンサを取り付ける場所に関しては、誘引具10のボビン80であってもよいし、繰り出し装置130のボビン131であってもよいし、その他、誘引紐11へ印加される荷重を検出又は推定することが可能な場所であれば、種々の変更が可能である。
制御部121は、記憶装置123に記憶されている人工知能を構成するプログラムを読み出して実行する。そして、過去に植物を栽培した際に誘引紐に印加された荷重(以下、「荷重情報」という。)、及び、第1実施形態に係る誘引具10の走行量及び/又は誘引紐11の繰り出し量(以下、「生育情報」という。)を取得する。これら荷重情報と生育情報については、誘引具を走行させた日の生育情報と、その日の荷重情報とが関連付けられている。
制御部121は、取得した荷重情報及び生育情報を教師データとして機械学習を行い、その機械学習により、荷重情報と生育情報との相関関係を求める。この処理は、荷重情報と生育情報とを取得した場合に、随時行われる。このようにして機械学習により荷重情報と生育情報との相関関係が求められれば、その相関関係を記憶部123に記憶しておく。
制御部121は、機械学習により、育成情報と誘引情報との相関関係を求める。この処理は、育成情報と誘引情報とを取得した場合に、随時行われる。このようにして機械学習により育成情報と誘引情報との相関関係が求められれば、その相関関係を記憶部123に記憶しておく。
本実施形態に係る誘引装置で植物を誘引する場合には、センサにより誘引紐11に係る荷重を取得し、その荷重と、荷重情報と生育情報との相関関係に基づいて誘引具110の走行量を求め、繰り出し装置130を駆動させてワイヤー140を繰り出す。このワイヤー140を繰り出す制御に関しては、1日のうちに1回~数回、予め定められた時刻に必要な繰り出し量だけ繰り出すようにしてもよいし、必要な繰り出し量が一定の量に到達するごとに、その繰り出し量の分だけ繰り出すようにしてもよい。
上記構成により、本実施形態に係る誘引装置は、以下の効果を奏する。
誘引紐11の必要な繰り出し量は植物の生育状態に応じて変化するものであり、その生育状態は、誘引紐11に印加される荷重、すなわち植物の重さによっても判別することができる。したがって、本実施形態により、植物を栽培する外部環境に関する情報を得るこことなく、植物の生育状態に応じた制動部材の制御を行うことができる。
<変形例>
・実施形態では、走行ローラ60に走行歯車61を設け、その走行歯車60が軌道101の歯102に係止されることで、非走行時における走行ローラ60の回転の抑制と、走行時の走行ローラ60の空転の抑制を両立している。この点、走行ローラ60とは別に軌道101の歯102に係止する部材を設け、誘引具10の移動を停止させる場合には、その部材を軌道101の歯102に係止させるものとしてもよい。こうすることで、非走行時における誘引具10の移動を抑制することができる。また、この場合において、走行ローラ60に走行歯車61を設けることは必須ではないが、走行ローラ60が走行歯車61を備えていれば、走行時の走行ローラ60の空転を抑制するという効果を維持することができる。加えて、この場合には、誘引紐11に荷重がかかっている状態では、誘引具10は誘引方向側へと移動する力を受けるため、少なくともその誘引方向への誘引具10の移動を抑制することができるものであればよい。
・駆動機構の構成はあくまで一例であって、走行ローラ60の回転をボビン80の回転に伝達可能な構成であれば、種々の変更が可能である。また、実施形態では走行ローラ60及びボビン80の回転軸の方向が同じであるが、ウォームギア等を利用して回転軸を別方向へ変換してもよい。
・第1実施形態において第2誘引具10a及び第3誘引具10bの少なくとも一方に係止ピン91等の走行ローラ60の回転を抑制する部材を設けるものとしてもよい。この場合には、誘引具10,10a,10bを移動させるときに、係止ピン91が設けられているものについては係止を解除すればよい。また、第2誘引具10a及び第3誘引具10bに係止ピン91等の走行ローラ60の回転を抑制する部材を設ける場合に、係止状態を常時解除状態とする機構を設けておけば、第1誘引具10の操作のみで第2誘引具10a及び第2誘引具10bの走行状態を制御することができる。
・第1実施形態において、誘引具10を3つ設ける例を示したが、誘引具の数はこれに限られない。例えば、連結されていない個別の誘引具10を植物100に取り付けるものとしてもよいし、2つの誘引具10を連結したり、4つ以上の誘引具10を連結するものとしたりしてもよい。
・第1実施形態において、誘引具10どうしを可撓性を有するロープ103で連結するものとしたが、可撓性を有さない長尺状の部材で連結するものとしてもよい。この場合には、少なくとも一つの誘引具10が係止ピン91等の走行ローラ60の回転を抑制する部材を備えていれば、その誘引具10の走行可能状態と走行不能状態とを切り替えることで、他の誘引具10の走行を可能としたり、走行を抑制したりすることができる。
・走行ローラ60の回転を抑止する部材については、実施形態に記載したものはあくまで一例であり、種々の変更が可能である。例えば、第1歯車71以外の歯車の回転を係止ピン91に準ずる部材で抑制するものとしてもよい。
・第2実施形態において、過去の環境情報と育成情報とを取得して教師データとし、機械学習により相関関係を求めて誘引具10の走行に関する制御に用いるものとしている。この点、制御部が人工知能を備えないものとし、予め環境情報と生育情報との相関関係に関するデータを作成して記憶部123に記憶させておき、取得した現在の環境情報と記憶部123に記憶されている相関関係に基づいて生育情報を求めるものとしてもよい。第3実施形態における荷重情報と生育情報との関係についても同様である。
・第2実施形態及び第3実施形態では、生育情報として誘引具10の走行量及び/又は誘引紐11の繰り出し量を用いているが、生育情報として植物の重さや大きさ等を用いてもよい。この場合には、植物の重さや大きさ等と誘引具10の走行量及び/又は誘引紐11の繰り出し量とを予め関連付けておき、人工知能により過去の環境情報と生育情報との相関関係を求める。そして、その相関関係を用いて誘引具10の走行量及び/又は誘引紐11の繰り出し量を求めればよい。また、植物の重さや大きさ等と誘引具10の走行量及び/又は誘引紐11の繰り出し量との相関関係についても機械学習により相関関係を求めるものとしてもよい。
・第2実施形態又は第3実施形態において、栽培開始からの必要な誘引量を予め求めておき、予め定められた時刻に必要な量だけ誘引具110を走行させたり、前回走行させてから予め定められた時間が経過した場合に必要な量だけ誘引具を走行させたりしてもよい。
・第1実施形態では、誘引具10に設けられた係止ピン91を係止孔71aに挿入することで、誘引具10の走行を抑制するものとし、第2実施形態及び第3実施形態では、固定された繰り出し装置130及びボビン131からワイヤー140を繰り出すことで、誘引具110の走行を抑制するものとした。この点、誘引具10,110に接続され、その誘引具10,110に追従又は先行して走行する制動手段により、誘引具10,110の走行を抑制するものとしてもよい。この場合には、制動手段は軌道101の歯102に係止可能な歯車を有する走行ローラを備えるものとし、第1実施形態に係る誘引具10が備える係止ピン91等の部材により、その走行ローラの回転を抑制するものとしてもよい。また、軌道101の歯102に係止可能な別の部材を設けるものとし、その部材を歯102に係止させることで、制動手段を停止させるものとしてもよい。この制動手段は人が操作してもよいし、第2実施形態及び第3実施形態と同等の制御装置を備えるものとし、その制御装置が作動することで、係止部である歯車等と被係止部である軌道101の歯102との係止状態を変更するものとしてもよい。
・実施形態では、誘引具10によりトマトの茎を誘引するものとしたが、誘引が必要な植物であれば、トマト以外に適用することもできる。