JP7347775B2 - 監視装置、監視システム、監視方法、及びプログラム - Google Patents
監視装置、監視システム、監視方法、及びプログラム Download PDFInfo
- Publication number
- JP7347775B2 JP7347775B2 JP2018221560A JP2018221560A JP7347775B2 JP 7347775 B2 JP7347775 B2 JP 7347775B2 JP 2018221560 A JP2018221560 A JP 2018221560A JP 2018221560 A JP2018221560 A JP 2018221560A JP 7347775 B2 JP7347775 B2 JP 7347775B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- image data
- point cloud
- unit
- converted
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
Landscapes
- Length Measuring Devices By Optical Means (AREA)
- General Factory Administration (AREA)
- Closed-Circuit Television Systems (AREA)
- Alarm Systems (AREA)
- Image Analysis (AREA)
Description
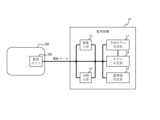
実施形態1に係る監視システムについて図面を用いて説明する。図1は、実施形態1に係る監視システムの構成を模式的に示したブロック図である。図2は、実施形態1に係る監視システムにおける監視装置の詳細な構成を模式的に示したブロック図である。図3~図8は、実施形態1に係る監視システムにおける監視装置の各種データの処理経路を模式的に示した図である。
実施形態2に係る監視システムについて図面を用いて説明する。図13は、実施形態2に係る監視システムの構成を模式的に示したブロック図である。
実施形態3に係る監視装置について図面を用いて説明する。図14は、実施形態3に係る監視装置の構成を模式的に示したブロック図である。
本発明では、前記第1の視点に係る監視装置の形態が可能であり、以下の通りである。
拠点を撮影する監視カメラからの撮影データが動画データであるときに前記動画データを画像データに変換する画像化部と、
前記撮影データが3次元データであるときに前記3次元データを点群データに変換する点群化部と、
第1モードのときに、前記画像化部で変換された前記画像データ、又は、前記点群化部で変換された前記点群データ、若しくは、前記撮影データが画像データであるときの他の画像データを用いて、機械学習して予測モデルを作成する予測モデル作成部と、
前記第1モードとは異なる第2モードのときに、前記画像化部で変換された前記画像データ、又は、前記点群化部で変換された前記点群データ、若しくは、前記撮影データが画像データであるときの前記他の画像データと、前記予測モデル作成部で作成された前記予測モデルと、を比較することにより、前記画像データ又は前記点群データ若しくは前記他の画像データに含まれる監視対象物の変化を判定するモデル判定部と、
前記第2モードのときに、前記点群化部で変換された前記点群データに含まれる前記監視対象物の所定形態を計測し、計測された計測値と、予め設定された基準値と、を比較することにより、前記監視対象物の変化を判定する基準値判定部と、
を備える、
監視装置。
前記監視カメラからのデータの出力経路を制御する第1経路制御部と、
前記画像化部又は前記点群化部若しくは前記第1経路制御部からのデータの出力経路を制御する第2経路制御部と、
をさらに備え、
前記第1経路制御部は、
前記撮影データが動画データであるときに、前記動画データを前記画像化部に向けて出力し、
前記撮影データが3次元データであるときに、前記3次元データを前記点群化部に向けて出力し、
前記撮影データが画像データであるときの前記他の画像データを第2経路制御部に向けて出力し、
前記第2経路制御部は、
前記第1モードのときに、前記画像化部からの前記画像データ、又は、前記点群化部からの前記点群データ、若しくは、前記第1経路制御部からの前記他の画像データを前記モデル作成部に向けて出力し、
前記第2モードのときに、前記画像化部からの前記画像データ、又は、前記第1経路制御部からの前記他の画像データを前記モデル判定部に向けて出力し、若しくは、前記点群化部からの前記点群データを前記モデル判定部及び前記基準値判定部に向けて出力する、
付記1記載の監視装置。
前記監視カメラからの前記撮影データを取得して前記第1経路制御部に向けて出力するデータ取得部と、
前記モデル判定部及び前記基準値判定部の少なくとも1つからの判定結果を出力する出力部と、
をさらに備え、
前記出力部は、前記判定結果を前記データ取得部に向けて出力し、
前記データ取得部は、前記出力部からの前記判定結果に基づいて前記監視対象物の変化を確認し、変化の程度に応じて前記監視カメラからの前記撮影データを取得する時間間隔を調整する、
付記2記載の監視装置。
前記撮影データは、時刻情報、位置情報、カメラ情報及び対象物情報の少なくとも1つの情報を含み、
前記判定結果は、前記時刻情報、前記位置情報、前記カメラ情報及び前記対象物情報の少なくとも1つの情報を含む、
付記3記載の監視装置。
前記画像化部は、前記動画データから、予め設定されたサンプリング周期で前記画像データを切り出し、切り出した前記画像データを所定の画像処理することによって、前記動画データから前記画像データに変換する、
付記1乃至4のいずれか一に記載の監視装置。
前記所定の画像処理は、精細化、高解像度化、ノイズ除去、低解像度化、オープニング処理、及び、モルフォロジー変換の少なくとも1つの処理である、
付記5記載の監視装置。
前記点群化部は、前記3次元データを1次点群データに変換し、変換された前記1次点群データに基づいてモデルデータを生成し、生成された前記モデルデータを2次点群データに変換することによって、前記3次元データを前記点群データに変換する、
付記1乃至6のいずれか一に記載の監視装置。
前記点群化部は、変換された前記点群データに対してフィルタ処理を実行する、
付記7記載の監視装置。
前記第1モードのときに、前記画像化部で変換された前記画像データ、又は、前記点群化部で変換された前記点群データ、若しくは、前記撮影データが画像データであるときの他の画像データに予測モデル用ラベルを付与し、前記予測モデル用ラベルが付与されたデータを前記予測モデル作成部に向けて出力するラベル付与部をさらに備える、
付記1乃至6のいずれか一に記載の監視装置。
本発明では、前記第2の視点に係る監視システムの形態が可能であり、以下の通りである。
拠点を撮影する監視カメラと、
付記1乃至9のいずれか一に記載の監視装置と、
を備える、
監視システム。
前記監視カメラを搭載するとともに、衛星測位装置を搭載し、かつ、前記監視装置と通信可能にする通信部を有する自動運転車両をさらに備え、
前記自動運転車両は、前記衛星測位装置で測位した測位情報を、前記監視カメラで撮影された前記撮影データに含めて、前記通信部を介して前記監視装置に送信する、
付記10記載の監視システム。
本発明では、前記第3の視点に係る監視方法の形態が可能であり、以下の通りである。
拠点を撮影する監視カメラからの撮影データが動画データであるときに前記動画データを画像データに変換するステップと、
前記撮影データが3次元データであるときに前記3次元データを点群データに変換するステップと、
第1モードのときに、変換された前記画像データ、又は、変換された前記点群データ、若しくは、前記撮影データが画像データであるときの他の画像データを用いて、機械学習して予測モデルを作成するステップと、
前記第1モードとは異なる第2モードのときに、変換された前記画像データ、又は、変換された前記点群データ、若しくは、前記撮影データが画像データであるときの前記他の画像データと、作成された前記予測モデルと、を比較することにより、前記画像データ又は前記点群データ若しくは前記他の画像データに含まれる監視対象物の変化を判定するステップと、
前記第2モードのときに、変換された前記点群データに含まれる前記監視対象物の所定形態を計測し、計測された計測値と、予め設定された基準値と、を比較することにより、前記監視対象物の変化を判定するステップと、
を含む、
監視方法。
本発明では、前記第4の視点に係るプログラムの形態が可能であり、以下の通りである。
拠点を撮影する監視カメラからの撮影データが動画データであるときに前記動画データを画像データに変換する処理と、
前記撮影データが3次元データであるときに前記3次元データを点群データに変換する処理と、
第1モードのときに、変換された前記画像データ、又は、変換された前記点群データ、若しくは、前記撮影データが画像データであるときの他の画像データを用いて、機械学習して予測モデルを作成する処理と、
前記第1モードとは異なる第2モードのときに、変換された前記画像データ、又は、変換された前記点群データ、若しくは、前記撮影データが画像データであるときの前記他の画像データと、作成された前記予測モデルと、を比較することにより、前記画像データ又は前記点群データ若しくは前記他の画像データに含まれる監視対象物の変化を判定する処理と、
前記第2モードのときに、変換された前記点群データに含まれる前記監視対象物の所定形態を計測し、計測された計測値と、予め設定された基準値と、を比較することにより、前記監視対象物の変化を判定する処理と、
をハードウェア資源に実行させる、
プログラム。
10 監視装置
11 データ取得部
12 経路制御部
13 画像化部
14 点群化部
15 経路制御部
16 ラベル付与部
17 予測モデル作成部
18 モデル判定部
19 基準値判定部
20 出力部
30、30a~30n 監視カメラ
40 ネットワーク
50、50a~50n 拠点
60 自動運転車両
70 衛星測位装置
80 通信部
100 ハードウェア資源
101 プロセッサ
102 メモリ
103 ネットワークインタフェイス
104 内部バス
Claims (10)
- 拠点を撮影する監視カメラからの撮影データが動画データであるときに前記動画データを画像データに変換する画像化部と、
前記撮影データが3次元データであるときに前記3次元データを点群データに変換する点群化部と、
第1モードのときに、前記画像化部で変換された前記画像データ、又は、前記点群化部で変換された前記点群データ、若しくは、前記撮影データが静止画データであるときの前記静止画データを用いて、機械学習して予測モデルを作成する予測モデル作成部と、
前記第1モードとは異なる第2モードのときに、前記画像化部で変換された前記画像データ、又は、前記点群化部で変換された前記点群データ、若しくは、前記撮影データが静止画データであるときの前記静止画データと、前記予測モデル作成部で作成された前記予測モデルと、を比較することにより、前記画像データ又は前記点群データ若しくは前記静止画データに含まれる監視対象物の変化を判定するモデル判定部と、
前記第2モードのときに、前記点群化部で変換された前記点群データに含まれる前記監視対象物の所定形態を計測し、計測された計測値と、予め設定された基準値と、を比較することにより、前記監視対象物の変化を判定する基準値判定部と、
を備え、
前記予測モデルの作成に用いた前記画像データ又は前記点群データ若しくは前記静止画データの種類は、前記第2モードで比較される前記画像データ又は前記点群データ若しくは前記静止画データの種類に対応しており、
前記予測モデルは、前記機械学習によって抽出された特徴を有する対象物に係るデータである、
監視装置。 - 前記監視カメラからのデータの出力経路を制御する第1経路制御部と、
前記画像化部又は前記点群化部若しくは前記第1経路制御部からのデータの出力経路を制御する第2経路制御部と、
をさらに備え、
前記第1経路制御部は、
前記撮影データが動画データであるときに、前記動画データを前記画像化部に向けて出力し、
前記撮影データが3次元データであるときに、前記3次元データを前記点群化部に向けて出力し、
前記撮影データが静止画データであるときの前記静止画データを第2経路制御部に向けて出力し、
前記第2経路制御部は、
前記第1モードのときに、前記画像化部からの前記画像データ、又は、前記点群化部からの前記点群データ、若しくは、前記第1経路制御部からの前記静止画データを前記予測モデル作成部に向けて出力し、
前記第2モードのときに、前記画像化部からの前記画像データ、又は、前記第1経路制御部からの前記静止画データを前記モデル判定部に向けて出力し、若しくは、前記点群化部からの前記点群データを前記モデル判定部及び前記基準値判定部に向けて出力する、
請求項1記載の監視装置。 - 前記監視カメラからの前記撮影データを取得して前記第1経路制御部に向けて出力するデータ取得部と、
前記モデル判定部及び前記基準値判定部の少なくとも1つからの判定結果を出力する出力部と、
をさらに備え、
前記出力部は、前記判定結果を前記データ取得部に向けて出力し、
前記データ取得部は、前記出力部からの前記判定結果に基づいて前記監視対象物の変化を確認し、変化の程度に応じて前記監視カメラからの前記撮影データを取得する時間間隔を調整する、
請求項2記載の監視装置。 - 前記画像化部は、前記動画データから、予め設定されたサンプリング周期で前記画像データを切り出し、切り出した前記画像データを所定の画像処理することによって、前記動画データから前記画像データに変換する、
請求項1乃至3のいずれか一に記載の監視装置。 - 前記点群化部は、前記3次元データを1次点群データに変換し、変換された前記1次点群データに基づいてモデルデータを生成し、生成された前記モデルデータを2次点群データに変換することによって、前記3次元データを前記点群データに変換する、
請求項1乃至4のいずれか一に記載の監視装置。 - 前記第1モードのときに、前記画像化部で変換された前記画像データ、又は、前記点群化部で変換された前記点群データ、若しくは、前記撮影データが静止画データであるときの前記静止画データに予測モデル用ラベルを付与し、前記予測モデル用ラベルが付与されたデータを前記予測モデル作成部に向けて出力するラベル付与部をさらに備える、
請求項1乃至5のいずれか一に記載の監視装置。 - 拠点を撮影する監視カメラと、
請求項1乃至6のいずれか一に記載の監視装置と、
を備える、
監視システム。 - 前記監視カメラを搭載するとともに、衛星測位装置を搭載し、かつ、前記監視装置と通信可能にする通信部を有する自動運転車両をさらに備え、
前記自動運転車両は、前記衛星測位装置で測位した測位情報を、前記監視カメラで撮影された前記撮影データに含めて、前記通信部を介して前記監視装置に送信する、
請求項7記載の監視システム。 - 拠点を撮影する監視カメラからの撮影データが動画データであるときに前記動画データを画像データに変換するステップと、
前記撮影データが3次元データであるときに前記3次元データを点群データに変換するステップと、
第1モードのときに、変換された前記画像データ、又は、変換された前記点群データ、若しくは、前記撮影データが静止画データであるときの前記静止画データを用いて、機械学習して予測モデルを作成するステップと、
前記第1モードとは異なる第2モードのときに、変換された前記画像データ、又は、変換された前記点群データ、若しくは、前記撮影データが静止画データであるときの前記静止画データと、作成された前記予測モデルと、を比較することにより、前記画像データ又は前記点群データ若しくは前記静止画データに含まれる監視対象物の変化を判定するステップと、
前記第2モードのときに、変換された前記点群データに含まれる前記監視対象物の所定形態を計測し、計測された計測値と、予め設定された基準値と、を比較することにより、前記監視対象物の変化を判定するステップと、
を含み、
前記予測モデルの作成に用いた前記画像データ又は前記点群データ若しくは前記静止画データの種類は、前記第2モードで比較される前記画像データ又は前記点群データ若しくは前記静止画データの種類に対応しており、
前記予測モデルは、前記機械学習によって抽出された特徴を有する対象物に係るデータである、
監視方法。 - 拠点を撮影する監視カメラからの撮影データが動画データであるときに前記動画データを画像データに変換する処理と、
前記撮影データが3次元データであるときに前記3次元データを点群データに変換する処理と、
第1モードのときに、変換された前記画像データ、又は、変換された前記点群データ、若しくは、前記撮影データが静止画データであるときの前記静止画データを用いて、機械学習して予測モデルを作成する処理と、
前記第1モードとは異なる第2モードのときに、変換された前記画像データ、又は、変換された前記点群データ、若しくは、前記撮影データが静止画データであるときの前記静止画データと、作成された前記予測モデルと、を比較することにより、前記画像データ又は前記点群データ若しくは前記静止画データに含まれる監視対象物の変化を判定する処理と、
前記第2モードのときに、変換された前記点群データに含まれる前記監視対象物の所定形態を計測し、計測された計測値と、予め設定された基準値と、を比較することにより、前記監視対象物の変化を判定する処理と、
をハードウェア資源に実行させ、
前記予測モデルの作成に用いた前記画像データ又は前記点群データ若しくは前記静止画データの種類は、前記第2モードで比較される前記画像データ又は前記点群データ若しくは前記静止画データの種類に対応しており、
前記予測モデルは、前記機械学習によって抽出された特徴を有する対象物に係るデータである、
プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018221560A JP7347775B2 (ja) | 2018-11-27 | 2018-11-27 | 監視装置、監視システム、監視方法、及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018221560A JP7347775B2 (ja) | 2018-11-27 | 2018-11-27 | 監視装置、監視システム、監視方法、及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020087036A JP2020087036A (ja) | 2020-06-04 |
| JP7347775B2 true JP7347775B2 (ja) | 2023-09-20 |
Family
ID=70908273
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018221560A Active JP7347775B2 (ja) | 2018-11-27 | 2018-11-27 | 監視装置、監視システム、監視方法、及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7347775B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112506081A (zh) * | 2020-11-30 | 2021-03-16 | 苏州迈创信息技术有限公司 | 一种安防用公厕环境监测系统 |
| CN115588265B (zh) * | 2022-12-12 | 2023-04-07 | 华能酒泉风电有限责任公司 | 一种风电场的智能监视系统 |
| CN117403018A (zh) * | 2023-10-17 | 2024-01-16 | 常州市信通电子有限公司 | 高炉风口成像智能监控系统和方法 |
| CN117666510B (zh) * | 2023-12-07 | 2024-10-01 | 滕州市永固玻璃制品有限公司 | 钢化玻璃的生产控制系统及方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017102838A (ja) | 2015-12-04 | 2017-06-08 | トヨタ自動車株式会社 | 物体認識アルゴリズムの機械学習のためのデータベース構築システム |
| WO2018179361A1 (ja) | 2017-03-31 | 2018-10-04 | 日本電気株式会社 | 画像処理装置、画像処理方法、および記録媒体 |
| JP2018185208A (ja) | 2017-04-25 | 2018-11-22 | 富士通株式会社 | 変化検知プログラム、変化検知装置及び変化検知方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09293141A (ja) * | 1996-04-24 | 1997-11-11 | Hitachi Ltd | 移動物体検出装置 |
-
2018
- 2018-11-27 JP JP2018221560A patent/JP7347775B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017102838A (ja) | 2015-12-04 | 2017-06-08 | トヨタ自動車株式会社 | 物体認識アルゴリズムの機械学習のためのデータベース構築システム |
| WO2018179361A1 (ja) | 2017-03-31 | 2018-10-04 | 日本電気株式会社 | 画像処理装置、画像処理方法、および記録媒体 |
| JP2018185208A (ja) | 2017-04-25 | 2018-11-22 | 富士通株式会社 | 変化検知プログラム、変化検知装置及び変化検知方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020087036A (ja) | 2020-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7347775B2 (ja) | 監視装置、監視システム、監視方法、及びプログラム | |
| CN104751603B (zh) | 危岩崩塌监测预警系统及方法 | |
| US10334965B2 (en) | Monitoring device, monitoring system, and monitoring method | |
| JP2023076913A (ja) | 異常判定装置 | |
| JP7145970B2 (ja) | コンクリート構造物の点検支援装置、点検支援方法及び点検支援プログラム | |
| JP6270433B2 (ja) | 情報処理装置、情報処理方法、情報処理システム | |
| US20200302188A1 (en) | Intra-facility activity analysis device, intra-facility activity analysis system, and intra-facility activity analysis method | |
| EP3434626B1 (en) | Projection instruction device, parcel sorting system, and projection instruction method | |
| JP7406451B2 (ja) | プログラマブルロジックコントローラ | |
| EP3434623B1 (en) | Projection indicator, cargo assortment system, and projection indicating method | |
| JP6610640B2 (ja) | 位置認識方法およびシステム、ならびに異常判定方法およびシステム | |
| EP3023912A1 (en) | Crack data collection apparatus and server apparatus to collect crack data | |
| JP7697670B2 (ja) | 安全管理装置、システム、方法、及びプログラム | |
| CN111178424A (zh) | 一种石油化工生产现场安全合规性实时检测系统及方法 | |
| CN106326865A (zh) | 一种基于无人机的水利工程区域实时监测系统及方法和装置 | |
| CN115296193A (zh) | 变电站智能巡检系统及方法 | |
| KR102479951B1 (ko) | IoT 기반 시설물 안전 관리 시스템, 서버 및 방법 | |
| JP2021196909A (ja) | 監視システム | |
| JP2020205027A (ja) | データ抽出装置、データ抽出装置の制御方法、情報処理プログラム、および記録媒体 | |
| US20200160208A1 (en) | Model sharing among edge devices | |
| KR20200030317A (ko) | 열화상카메라 및 iot센서를 활용한 송배전설비 현장점검 증강현실 플랫폼 | |
| US20190188864A1 (en) | Method and apparatus for detecting deviation from a motion pattern in a video | |
| US20220084216A1 (en) | Method and apparatus for detecting motion deviation in a video | |
| JP6702402B2 (ja) | 画像処理システム、画像処理方法および画像処理プログラム | |
| US10916017B2 (en) | Method and apparatus for detecting motion deviation in a video sequence |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211007 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221007 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230411 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230420 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230808 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230831 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7347775 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |