以下、本発明の実施形態による椅子について説明する。
図1は、実施形態に係る椅子1の斜視図、図2は、作動機構10を前方から見た斜視図、図3は、作動機構10を後方から見た斜視図、図4は、作動機構10の側面図、図5は、作動機構10の回動部分の拡大図、図6は、椅子の制御構造のブロック図である。図1に示すように、椅子1は、基台2を備える。基台2の上には座3が取り付けられており、座3の後方には背凭れ4が設けられている。座3及び背凭れ4は、それぞれが傾動可能である。座3の上方であって背凭れ4の左右両側方には、それぞれアームレスト5が取り付けられており、背凭れ4の上部には、ヘッドレスト6が取り付けられている。また、椅子1は、図6に示す制御装置30を備えている。制御装置30は、例えば基台2の内側に設けられており、座3及び背凭れ4の動作を制御する。
座3の下方における基台2の内側には、作動機構10が設けられている。図2は、作動機構10を前方から見た斜視図、図3は、作動機構10を後方から見た斜視図、図4は、作動機構10の側面図である。図2及び図3に示すように、作動機構10は、第1作動機構である後作動機構10R及び前作動機構10Fと、第2作動機構である背作動機構10Bと、を備える。また、作動機構10は、左右方向に延在する主軸11を備えている。なお、後作動機構10R、前作動機構10F、及び背作動機構10Bは、共通する機能の部材を備える。以下の説明において、共通する機能の部材について、共通の事項の説明を行う際には、「R」「F」「B」の符号を取り除いて説明を行うことがある。
図4に示すように、後作動機構10Rは、座3における後部に接続され、前作動機構10Fは、座3における前部に接続されている。後作動機構10Rと前作動機構10Fは、座3を主軸11周りに傾動させながら前後方向にスライドさせる。背作動機構10Bは、背凭れ4に接続される。背作動機構10Bは、背凭れ4を主軸11周りに傾動させる。作動機構10は、第1動作形式による第1動作~第3動作形式による第3動作の3つの動作を選択的に動作可能として座3及び背凭れ4を動作させる。第1動作は、座3と背凭れ4を共通する傾動角度で傾動させる動作であり、第2動作は、座3を背凭れ4の傾動角度より小さい傾動角度で傾動させながらスライドさせる動作であり、第3動作は、座3を動作させずに背凭れ4を傾動させる動作である。
後作動機構10Rは、後アーム12Rを備える。後アーム12Rは、前方から後方に向けて上方に延在する直線状をなしている。後アーム12Rの一端は、座3の裏面における後部に左右方向に沿う軸回りに相対回転可能にピン接続されている。後アーム12Rの他端は、図5に示すように、後支持筒13Rに固定されている。後支持筒13Rは主軸11と同軸に設けられ、後支持筒13Rには主軸11が貫通している。後アーム12Rは、主軸11周りに主軸11とは独立して回動可能である。したがって、後支持筒13Rが回動することにより、後アーム12Rが主軸11周りに揺動する。
後アーム12Rの近傍位置には、後エンコーダ15Rが設けられている。後エンコーダ15Rは、後アーム12Rの主軸11周りの回転角度を検出する。後エンコーダ15Rと後支持筒13Rにはそれぞれプーリが設けられ、両プーリの間にはベルト18Rが掛け渡されている。、このため、後エンコーダ15Rでは、後支持筒13R及び後アーム12Rの回転角度を検出することが可能である。後エンコーダ15Rは、制御装置30に電気的に接続されている。後エンコーダ15Rは、検出した後アーム12Rの回転角度を制御装置30に出力する。
前作動機構10Fは、前アーム12Fを備える。前アーム12Fは、後方から前方に向けて上方に延在する直線状をなしている。前アーム12Fの一端は、接続アーム14の一端に、左右方向に沿う軸回りに相対回転可能にピン接続されている。接続アーム14は、長手方向略中央部が屈曲する屈曲形状をなしている。接続アーム14の他端は、座3の裏面における前部に、左右方向に沿う軸回りに相対回転可能にピン接続されている。前アーム12Fの他端は、前支持筒13Fに固定されている。前支持筒13Fは主軸11及び後支持筒13Rと同軸に設けられ、前支持筒13Fに主軸11及び後支持筒13Rが貫通している。前支持筒13Fは主軸11周りに主軸11及び後支持筒13Rとは独立して回動可能である。したがって、前支持筒13Fが回動することにより、前アーム12Fが主軸11周りに揺動する。
以上により、接続アーム14と、前アーム12Fと、後アーム12Rと、座3とは、前アーム12Fと、後アーム12Rとの回転中心となる主軸11で前後方向への移動が規制された4節リンクを構成している。このため、前アーム12Fと、後アーム12Rとが、それぞれ独立して回動すると、それぞれの回転角度に応じて座3は傾動するとともに、接続アーム14が前アーム12Fに対して回転することで座3は前後方向にスライドする。
前アーム12Fの近傍位置には、前エンコーダ15Fが設けられている。前エンコーダ15Fは、前アーム12Fの主軸11周りの回転角度を検出する。前エンコーダ15Fと前支持筒13Fにはそれぞれプーリが設けられ、両プーリの間にはベルト18Fが掛け渡されている。このため、前エンコーダ15Fでは、前支持筒13F及び前アーム12Fの回転角度を検出することが可能である。前エンコーダ15Fは、制御装置30に電気的に接続されている。前エンコーダ15Fは、検出した前アーム12Fの回転角度を制御装置30に出力する。
背作動機構10Bは、背アーム12Bを備える。背アーム12Bは、背凭れ4を支持するフレーム部材に接続され、前側から後側に向けて、上方に向けてわずかに湾曲する形状をなしている。背アーム12Bの先端は、主軸11に固定されている。背アーム12Bは、主軸11周りに回動可能であり、主軸11の回転に伴って揺動する。
背アーム12Bの近傍位置には、背エンコーダ15Bが設けられている。背エンコーダ15Bは、背アーム12Bの回転角度を検出する。背エンコーダ15Bと主軸11にはそれぞれプーリが設けられ、両プーリの間にはベルト18Bが掛け渡されている。、このため、背エンコーダ15Bでは、主軸11及び背アーム12Bの回転角度を検出することが可能である。背エンコーダ15Bは、制御装置30に電気的に接続されている。背エンコーダ15Bは、検出した背アーム12Bの回転角度を制御装置30に出力する。
後支持筒13Rは、後作動機構10Rを作動させる後アームアクチュエータ20Rが接続されている。後アームアクチュエータ20Rは、後モータ24Rと、後モータ24Rで軸回りに回転する後ボールねじ21Rと、後ボールねじ21Rに螺合されていて後ボールねじ21Rの軸回りに回転に応じて当該軸方向に進退する後ナット25Rを備えている。後ボールねじ21Rは、支持板26の上面に回転可能に支持されている。また、後モータ24Rは、後ボールねじ21Rの後方において支持板26の上面に支持されている。後ナット25Rには左右方向に沿う軸回りに回転可能に後リンク28Rがピン接続されている。後リンク28Rは、左右方向に沿う軸回りに回転可能に後駆動アーム29Rの一端にピン接続されている。後リンク28Rの他端は後支持筒13Rに固定されている。
図4に示す後モータ24Rはサーボモータであり、後モータ24Rが作動することにより、後モータ24Rの回転が後ボールねじ21Rに伝達され、後ボールねじ21Rに螺合された後ナット25Rが前後方向に移動する。このため、後ナット25Rの移動に伴い、後ナット25Rに接続された後駆動アーム29Rと、後駆動アーム29Rが固定された後支持筒13Rが回転し、これにより後アーム12Rが揺動する。
前支持筒13Fは、前モータ24Fと、前モータ24Fで軸回りに回転する前ボールねじ21Fと、前ボールねじ21Fに螺合されていて前ボールねじ21Fの軸回りに回転に応じて当該軸方向に進退する前ナット25Fを備えている。前ボールねじ21Fは、支持板26の上面に回転可能に支持されている。また、前モータ24Fは、前ボールねじ21Fの後方において支持板26の上面に支持されている。前ナット25Fには左右方向に沿う軸回りに回転可能に前リンク28Fがピン接続されている。前リンク28Fは、左右方向に沿う軸回りに回転可能に前駆動アーム29Fの一端にピン接続されている。前リンク28Fの他端は後支持筒13Rに固定されている。
前モータ24Fはサーボモータであり、前モータ24Fが作動することにより、前モータ24Fの回転が前ボールねじ21Fに伝達され、前ボールねじ21Fに螺合された前ナット25Fが前後方向に移動する。このため、前ナット25Fの移動に伴い、前ナット25Fに接続された前駆動アーム29Fと、前駆動アーム29Fが固定された前支持筒13Fが回転し、これにより前アーム12Fが揺動する。
主軸11は、背モータ24Bと、背モータ24Bで軸回りに回転する背ボールねじ21Rと、背ボールねじ21Bに螺合されていて背ボールねじ21Bの軸回りに回転に応じて当該軸方向に進退する背ナット25Bを備えている。背ボールねじ21Bは、支持板26の上面に回転可能に支持されている。また、背モータ24Bは、背ボールねじ21Bの後方において支持板26の上面にに支持されている。背ナット25Bには左右方向に沿う軸回りに回転可能に背リンク28Bがピン接続されている。背リンク28Bは、左右方向に沿う軸回りに回転可能に背駆動アーム29Bの一端にピン接続されている。背リンク28Bの他端は主軸11に固定されている。
背モータ24Bはサーボモータであり、背モータ24Bが作動することにより、背モータ24Bの回転が背ボールねじ21Bに伝達され、背ボールねじ21Bに螺合された背ナット25Bが前後方向に移動する。このため、背ナット25Bの移動に伴い、主軸11が回転し、背ナット25Bに接続された背駆動アーム29Bと、背駆動アーム29Bが固定された主軸11が回転し、これにより背アーム12Bが揺動する。
図2及び図4に示すように、基台2の下方には、高さ調整アクチュエータ20Uが設けられている。高さ調整アクチュエータ20Uにより、支持板が昇降させられることにより、座3を含む支持板よりも上方の機構の高さを変更可能であり、これにより座3の高さを調整可能とされている。
図6に示すように、制御装置30には、動作形式選択スイッチ40と、傾動角度調整スイッチ50とが接続されている。動作形式選択スイッチ40及び傾動角度調整スイッチ50は、例えば図示しないタッチパネルに設けられたGUI(Graphical User Interface)である。動作形式選択スイッチ40及び傾動角度調整スイッチ50は、つまみやダイヤルなどでもよい。タッチパネルは、例えば、着座者が操作可能な位置、例えばアームレストに取り付けられて設けられている。
制御装置30は、動作形式選択スイッチ40及び傾動角度調整スイッチ50の操作に基づいて、椅子1をリクライニングさせる。椅子1は、リクライニングの形式として、第1動作形式~第3動作形式の3つの動作形式のいずれかでリクライニングする。第1動作形式は、座3と背凭れ4が一体となって共通する傾動角度で傾斜する動作形式である。第2動作形式は、座3が傾動するとともにスライドし、背凭れ4が傾動する動作形式である。なお、本実施形態において第2動作形式では、座3の傾動角度は、背凭れ4の傾動角度よりも小さい傾動角度である。第3動作形式では、座3は傾動せず背凭れ4は傾動する。なお、本明細書において傾動角度とは、傾動した角度、言い換えると、傾動により変化した角度を意味する。
動作形式選択スイッチ40は、これらの第1動作形式~第3動作形式の中から、椅子1の動作形式を選択するためのスイッチである。動作形式選択スイッチ40は、着座者等の操作に応じた信号を制御装置30に出力する。
傾動角度調整スイッチ50は、座3及び背凭れ4の傾動角度を調整するためのスイッチである。傾動角度調整スイッチ50は、着座者等の操作に応じた信号を制御装置30に出力する。座3及び背凭れ4の傾動角度は連動しており、一方の傾斜角度、例えば背凭れ4の傾斜角度を設定すると、他方の傾斜角度、例えば座3の傾斜角度が設定される。座3及び背凭れ4の傾動角度の関係は、動作形式によって異なる。
制御装置30は、動作形式選択スイッチ40によって選択された動作形式で椅子1をリクライニングさせる制御を行う。制御装置30は、例えば、選択された動作形式及び傾動角度で座3及び背凭れ4を動作させるために、後アームアクチュエータ20R、前アームアクチュエータ20F、背アームアクチュエータ20Bのそれぞれを作動させるためのプログラムを記憶している。制御装置30は、傾動角度調整スイッチ50により出力された信号に基づいて、後アームアクチュエータ20R、前アームアクチュエータ20F、背アームアクチュエータ20Bのそれぞれを作動させるように制御することにより、座3及び背凭れ4をリクライニングする際のリクライニング角度を調整する。
制御装置30は、座3及び背凭れ4をリクライニングする際のリクライニング角度を調整するにあたり、後エンコーダ15Rにより出力される後アーム12Rの回転角度に基づいて、後アームアクチュエータ20Rの制御量を修正しながら後アーム12Rの傾動角度を調整する。制御装置30は、前エンコーダ15Fにより出力される前アーム12Fの回転角度に基づいて、前アームアクチュエータ20Fの制御量を修正しながら前アーム12Fの傾動角度を調整する。制御装置30は、背エンコーダ15Bにより出力される背アーム12Bの回転角度に基づいて、背アームアクチュエータ20Bの制御量を修正しながら背アーム12Bの傾動角度を調整する。
次に、椅子1の動作について、動作形式毎に説明する。まず、第1動作形式による椅子1の動作について説明する。図7は、第1動作形式で動作する椅子1の姿勢の変化を示す図である。図7(A)に示すように、リクライニング前の椅子1は、座3が略水平面に沿って配置され背凭れ4が略鉛直う平面に沿って配置された姿勢となっている。以下、リクライニングされる前の椅子1の姿勢を基本姿勢という。基本姿勢では、座3と背凭れ4がなす角度は略90°となっている。
第1動作形式で椅子1をリクライニングさせる際、制御装置30は、後アーム12R、前アーム12F、及び背アーム12Bがいずれも主軸11周りに同一の角度で傾動するようにアームアクチュエータ20を制御する。このような制御により、基本姿勢となっている椅子1が第1動作形式でリクライニングし始めると、図7(B)に示すように、座3及び背凭れ4は、主軸11周りに時計回りで回転するように傾動する。
ここで、後アーム12Rと前アーム12Fが主軸11周りに同一の傾動角度で傾動すると、前アーム12Fと接続アーム14のなす角度は一定のまま維持される。さらに、後アーム12R、前アーム12F、及び背アーム12Bが主軸周りに同一の傾動角度で主軸11周りに傾動することにより、座3及び背凭れ4は、主軸11周りに同一の傾動角度で傾動し、座3及び背凭れ4がなす角度は一定に維持される。このため、背凭れ4に対する座3の相対的な位置が一定のまま維持されている。
続いて、後アーム12R、前アーム12F、及び背アーム12Bをさらに傾動させると、図7(C)に示すように、背凭れ4の上部が後方に倒れ込むように傾動するとともに、座3の前部が上昇するように傾動する。この状態でも、接続アーム14と座3とのなす角度が一定に維持されており、背凭れ4に対する座3の相対的な位置が一定のまま維持されている。
そして、後アーム12R、前アーム12F、及び背アーム12Bをさらに傾動させると、図7(D)に示すように、背凭れ4が最も傾斜した最大傾斜姿勢となる。第1動作形式において背凭れ4が最大傾斜姿勢となった場合には、座3及び背凭れ4がなす角度は、基本姿勢の時の角度と同一である。このように、第1動作形式では、座3及び背凭れ4がなす角度が一定のまま、リクライニングが進行する。
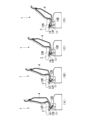
次に、第2動作形式による椅子1の動作について説明する。図8は、第2動作形式で動作する椅子1の姿勢の変化を示す図である。図8(A)に示すように、基本姿勢となっている椅子1を第2動作形式でリクライニングさせる際、制御装置30は、後アーム12R及び背アーム12Bが主軸11周りに同一の角度で傾動するように後アームアクチュエータ20R及び背アームアクチュエータ20Bを作動させ、前アーム12Fは動作しないように前アームアクチュエータ20Fを制御する。この場合、前アーム12Fは、その回転角度が後アーム12Rの回転角度より小さくなるように前アームアクチュエータ20Fを制御してもよい。このような制御により、基本姿勢となっている椅子1が第2動作形式でリクライニングし始めると、図8(B)に示すように、座3及び背凭れ4は、主軸11周りに時計回りで回転するように傾動する。なお、背アーム12Bに対して後アーム12Rの主軸11周りの回転角度が小さくなるようにしてもよい。
ここで、後アーム12Rが主軸11周りに傾動し、前アーム12Fが動作していない、または、前アーム12Fの回転角度が後アーム12Rの回転角度より小さくなるようにすると、前アーム12Fと接続アーム14のなす角度が変化し、接続アーム14と座3のなす角度も変化する。また、後アーム12R及び背アーム12Bが主軸11周りに同一の傾動角度で傾動することにより、座3及び背凭れ4は、主軸11周りに傾動する。このとき、前アーム12Fが動作せず、または、前アーム12Fの回転角度が小さいので、接続アーム14と座3のなす角度が変化し、図8(B)に示すように、背凭れ4は、時計回りで主軸11周りに傾動するとともに、座3は、背凭れ4の傾動角度より小さい傾動角度で時計回りに主軸11周りを傾動しながら背凭れ4の方向にスライドする。座3と背凭れ4が同軸で傾動し、座3の傾動角度が背凭れ4の傾動角度より小さいと、傾動角度が大きくなるにつれて、座3と背凭れ4の離間距離が大きくなる。この点、接続アーム14と座3のなす角度が変化し、座3が背凭れ4の方向にスライドするので、座3と背凭れ4のなす角度は広がるが、座3と背凭れ4との間の距離は維持されている。
続いて、後アーム12R及び背アーム12Bをさらに傾動させると、図8(C)に示すように、第1動作形式と同様に背凭れ4の上部が後方に倒れ込むように傾動するが、座3の傾動角度の変化はないか、若しくはわずかなものとなる。この状態では、座3と背凭れ4がなす角度はさらに広がるが、座3と背凭れ4との間の距離は維持されている。
そして、後アーム12R及び背アーム12Bをさらに傾動させると、図8(D)に示すように、最大傾斜姿勢となる。第2動作形式において背凭れ4が最大傾斜姿勢となった場合には、座3及び背凭れ4がなす角度は、基本姿勢の時の角度より広がるが、座3及び背凭れ4の距離はほぼ維持される。このように、第2動作形式では、背凭れ4が傾斜するとともに、座3が背凭れ4よりも小さい傾動角度で傾斜しながらスライドしてリクライニングが進行する。
次に、第3動作形式による椅子1の動作について説明する。図9は、第3動作形式で動作する椅子1の姿勢の変化を示す図である。図9(A)に示すように、基本姿勢となっている椅子1を第3動作形式でリクライニングさせる際、制御装置30は、背アーム12Bが主軸11周りに傾動するように背アームアクチュエータ20Bを作動させ、後アーム12R及び前アーム12Fは動作しないように、後アームアクチュエータ12R及び前アームアクチュエータ20Fを制御する。また、後アーム12R及び前アーム12Fが動作しないように後アームアクチュエータ20R及び前アームアクチュエータ20Fを制御する。このような制御により、基本姿勢となっている椅子1が第3動作形式でリクライニングし始めると、図9(B)に示すように、背凭れ4は、主軸11周りに時計回りで回転するように傾動し、座3は動作せずに停止している。このように、背凭れ4が主軸11周りに傾動し、座3が停止していることにより、座3と背凭れ4のなす角度は広がり座3と背凭れ4との間の距離も広がる。
続いて、背アーム12Bをさらに傾動させると、図9(C)に示すように、第1動作形式と同様に背凭れ4の上部が後方に倒れ込むように傾動するが、座3は停止したままとなる。この状態では、座3と背凭れ4がなす角度および座3と背凭れ4の間の距離はさらに広がる。
そして、背アーム12Bをさらに傾動させると、図9(D)に示すように、最大傾斜姿勢となる。第3動作形式において背凭れ4が最大傾斜姿勢となった場合には、座3及び背凭れ4がなす角度は、基本姿勢の時の角度より広がり、座3と背凭れ4の間の距離も広がる。このように、第3動作形式では、背凭れ4が傾斜するが、座3はそのまま停止した状態でリクライニングが進行する。
上記の説明のとおり、実施形態に係る椅子1では、第1動作形式~第3動作形式の3つの動作形式でリクライニングすることができる。このため、3種類の動作で座と背凭れを動作させることができるので、リクライニングのバリエーションを多くすることができる。
また、実施形態に係る椅子1は、後アーム12R、前アーム12F、及び背アーム12Bが回転することにより、第1動作形式でリクライニングし、後アーム12R及び背アーム12Bが回転することにより第2動作形式でリクライニングし、背アーム12Bが回転することにより第3動作形式でリクライニングする。このため、座3と背凭れ4の動作をそれぞれ確実に行わせることができるとともに、後アーム12R、前アーム12F、及び背アーム12Bの連携により第1動作形式及び第2動作形式を含む所望の動作形式で動作することができる。
また、後アーム12R、前アーム12F、及び背アーム12Bは、それぞ後アームアクチュエータ20R、前アームアクチュエータ20F、背アームアクチュエータ20Bにより回転させられる。このため、アクチュエータの作動に基づいて作動機構10により着座者の力によらず座や背凭れを動作させることができる。また、後アームアクチュエータ20R、前アームアクチュエータ20F、背アームアクチュエータ20Bは、いずれも制御装置30により制御される。このため、制御装置30の制御によってアームアクチュエータ20を作動させて座3や背凭れ4を動作させることができる。また、制御装置30は、後エンコーダ15R、前エンコーダ15F、及び背エンコーダ15Bの検出結果に基づいて、いわゆるフィードバック制御により後アーム12R、前アーム12F、及び背アーム12Bの回転角度を調整している。このため、座3や背凭れ4の傾動角度を精度良く制御することができる。
また、椅子としては、複数のリクライニングの動きを体感できるシートシミュレータがある。動作形式として、上記の実施形態のような第1動作形式及び第2動作形式などの複数の形式がある場合でも、椅子自体が異なると、動作形式の違いを着座者に体感させることは難しくなる。この点、上記の実施形態に係る椅子1では、複数の動作形式による座り心地を試すことができる。したがって、上記の実施形態の椅子1をシートシミュレータに用いることにより、動作形式による座り心地の違いを着座者に実感させやすくすることができる。
以上、本発明による椅子1の実施形態について説明したが、本発明は上記の実施形態に限定されるものではなく、その趣旨を逸脱しない範囲で適宜変更可能である。例えば、上記の実施形態では、後作動機構10R、前作動機構10F、背作動機構10Bのそれぞれを作動させる後アームアクチュエータ20R、前アームアクチュエータ20F、背アームアクチュエータ20Bを設けているが、複数の作動機構を作動させるアクチュエータを設けて、アクチュエータの数を作動機構の数より少なくしてもよい。この場合、例えば、作動機構同士の間に減速機やクラッチなどを介在させて、1つのアクチュエータで複数の作動機構の一部または全部を作動させるようにしてもよい。また、アームアクチュエータ20は、ボールねじ21とモータ24を備えるが、他の態様でもよい。例えば、モータ24のみを用いてもよいし、モータ24に代えてシリンダなどを用いてもよい。また、複数のアクチュエータとしては、共通の種類ではなく、異なる種類のアクチュエータを用いてもよい。また、エンコーダ15をモータ24の後方に配置してもよい。エンコーダ15では、モータ24の駆動量を検出し、検出したモータの駆動量に基づいてアーム12の角度を検出してもよい。
例えば、背作動機構10Bの背アーム12Bを作動させるアクチュエータが設けられている場合に、第1動作形式では、背アーム12Bに後アーム12Rをクラッチによって接続させ、第2動作形式では、背アーム12Bに後アーム12R及び前アーム12Fをクラッチによって接続させ、第3動作形式では、背アーム12Bには後アーム12R及び前アーム12Fのいずれも接続させないようにクラッチを切るようにすればよい。また、上記の実施形態において、アーム12を作動させるアームアクチュエータ20以外のアクチュエータ20は、対応するアーム12が作動しないようにアーム12を保持していてもよいし、アーム12が自由に動くように解放していてもよい。
また、上記の実施形態では、作動機構10は、第1動作形式から第3動作形式までの3つの動作形式の動作を選択的に動作可能として座3及び背凭れ4を動作させることができるが、第1動作形式から第3動作形式による3つの動作のうち少なくとも2つの動作を選択的に動作可能として座3及び背凭れ4を動作させることができるようにすればよい。具体的には、作動機構10は、座3及び背凭れ4を動作させるにあたり、第1動作と第2動作を選択的に動作可能としてもよいし、第2動作と第3動作を選択的に動作可能としてもよいし、第3動作と第1動作を選択的に動作可能としてもよい。また、作動機構10は、第1動作形式から第3動作形式による3つの動作のうち少なくとも2つの動作を含む3つまたは4つ以上の動作を選択的に動作可能として座3及び背凭れ4を動作させることができるようにしてもよい。
また、上記の実施形態では、後作動機構10R、前作動機構10F、及び背作動機構10Bをアームアクチュエータ20によって動作させるようにしているが、アームアクチュエータ20を設けることなく、後作動機構10R、前作動機構10F、及び背作動機構10Bによって第1動作形式~第3動作形式等の複数の動作形式による動作を行うことができるようにしてもよい。この場合、例えば、動作形式毎に動作するアーム12を切り替える切替機構などを設け、複数の動作形式による動作を可能とすればよい。切替機構は、例えば、第1切替形式では、背凭れ4を傾動させると、背アーム12Bの傾動に伴って後アーム12R及び前アーム12Fが傾動し、第2切替形式では、背凭れ4を傾動させると、背アーム12Bの傾動に伴って後アーム12Rが傾動し、第3切替形式では、背凭れ4を傾動させても、背アーム12Bの傾動に伴って後アーム12R及び前アーム12Fが傾動しない機構とすればよい。
また、上記の実施形態では、制御装置30が後アームアクチュエータ20R、前アームアクチュエータ20F、背アームアクチュエータ20Bのそれぞれを個々に制御するためのプログラムを記憶する態様に代えてまたは加えて、エンコーダ15による検出結果に基づいて、後アームアクチュエータ20R、前アームアクチュエータ20F、背アームアクチュエータ20Bを制御するようにしてもよい。例えば、第1動作形式でアームアクチュエータ20を制御する場合に、背エンコーダ15Bで検出した背アーム12Bの傾動角度と同一の傾動角度となるように、後アーム12R及び前アーム12Fを後アームアクチュエータ20R及び前アームアクチュエータ20Fによって制御するようにしてもよい。このようにすることで、前アーム12F、後アーム12R及び背アーム12Bを対応するエンコーダ15の検出結果に基づて精度良く動作し、これにより第1動作及び第2動作を含む動作形式となるように精度良く制御することができる。
また、例えば、背凭れ4の傾動角度に応じて座3の動作が決まるようにアームアクチュエータ20を制御する場合には、背アームアクチュエータ20Bを設けないようにしてもよい。そして、例えば、背エンコーダ15Bの検出結果に基づいて、第1動作形式により椅子1をリクライニングさせる場合には後アーム12R及び前アーム12Fが動作するように後アームアクチュエータ20R及び前アームアクチュエータ20Fを制御し、第2動作形式により椅子1をリクライニングさせる場合には後アーム12Rが動作するように後アームアクチュエータ20Rを制御し、第3動作形式により椅子1をリクライニングさせる場合には後アーム12R及び前アーム12Fが動作しないように後アームアクチュエータ20R及び前アームアクチュエータ20Fを制御してもよい。このようにすることにより、座3と背凭れ4の相対的な傾動角度の関係を精度よく保ちながら制御を行うことができる。