JP7370840B2 - 画像処理装置、画像処理方法、コンピュータプログラム及び記憶媒体 - Google Patents
画像処理装置、画像処理方法、コンピュータプログラム及び記憶媒体 Download PDFInfo
- Publication number
- JP7370840B2 JP7370840B2 JP2019222310A JP2019222310A JP7370840B2 JP 7370840 B2 JP7370840 B2 JP 7370840B2 JP 2019222310 A JP2019222310 A JP 2019222310A JP 2019222310 A JP2019222310 A JP 2019222310A JP 7370840 B2 JP7370840 B2 JP 7370840B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- regression
- size
- area
- region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/103—Static body considered as a whole, e.g. static pedestrian or occupant recognition
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F17/00—Digital computing or data processing equipment or methods, specially adapted for specific functions
- G06F17/10—Complex mathematical operations
- G06F17/18—Complex mathematical operations for evaluating statistical data, e.g. average values, frequency distributions, probability functions, regression analysis
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/136—Segmentation; Edge detection involving thresholding
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
- G06T7/62—Analysis of geometric attributes of area, perimeter, diameter or volume
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/25—Determination of region of interest [ROI] or a volume of interest [VOI]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/52—Surveillance or monitoring of activities, e.g. for recognising suspicious objects
- G06V20/53—Recognition of crowd images, e.g. recognition of crowd congestion
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20021—Dividing image into blocks, subimages or windows
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20076—Probabilistic image processing
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Data Mining & Analysis (AREA)
- Pure & Applied Mathematics (AREA)
- Mathematical Analysis (AREA)
- Mathematical Physics (AREA)
- Computational Mathematics (AREA)
- Mathematical Optimization (AREA)
- Human Computer Interaction (AREA)
- Geometry (AREA)
- Evolutionary Biology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Operations Research (AREA)
- Probability & Statistics with Applications (AREA)
- Bioinformatics & Computational Biology (AREA)
- Algebra (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Databases & Information Systems (AREA)
- Software Systems (AREA)
- General Engineering & Computer Science (AREA)
- Image Analysis (AREA)
- Closed-Circuit Television Systems (AREA)
Description
そこで、本発明は、検出対象とする最小サイズに基づき、回帰領域の数を削減し演算効率を向上した画像処理装置を提供することを目的とする。
画像を取得する画像取得手段と、
前記画像における特定物体のサイズを取得するサイズ取得手段と、
前記サイズ取得手段によって取得された前記特定物体のサイズに基づき、前記画像を複数の画像領域に分割して、前記特定物体の数を推定するための回帰領域を設定すると共に、検出対象とする前記特定物体の最小サイズに対応した所定サイズより小さい画像領域が、前記回帰領域として設定されないようにする設定手段と、
設定された前記回帰領域に対して、前記特定物体の数を推定する回帰処理を施すことで前記画像に含まれる前記特定物体の数を推定する推定手段と、を有することを特徴とする。
<実施例1>
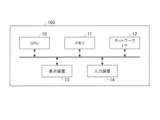
画像処理装置100は、ハードウェア構成として、コンピュータとしてのCPU10と、メモリ11と、ネットワークI/F12と、表示装置13と、入力装置14と、を含む。CPU10は、画像処理装置100の全体の制御を司る。メモリ11は、CPU10が処理に利用するデータ、コンピュータプログラム等を記憶し、記憶媒体として機能する。ネットワークI/F12は、画像処理装置100をネットワークに接続するインタフェースであり、表示装置13は、液晶表示装置等であり、CPU10による処理の結果等を表示する。
CPU10がメモリ11に記憶されたコンピュータプログラムに基づき処理を実行することにより、後述する図2の画像処理装置100の機能構成及び後述する図3のフローチャートの処理が実現される。
次に、図2は画像処理装置100のCPU10により実行される画像処理の機能ブロック図である。
画像取得部101は、画像を取得するための画像取得手段として機能する。画像取得部101は、例えば、CMOSセンサやCCDセンサ等の固体撮像素子を有するネットワークカメラからネットワークを介して画像を取得してもよいし、ハードディスク等のメモリ11から画像を取得してもよい。
人体サイズ取得部102は、人数を推定する対象となる画像の人体サイズを取得し、画像における特定物体のサイズを取得するサイズ取得手段として機能する。
また、時間帯や状況に応じて動的に上記のパラメータ(a~c)を変化させてもよい。なお、人体サイズの取得は任意の方法で良く、これらに限定されるものではない。
250pxの回帰領域は、検出可能な人体サイズは40px~60pxであり、最小人体サイズ以上の人体が検出可能である。このとき、250px未満のサイズの回帰領域では、最小人体サイズである40px未満のサイズが検出可能となる。したがって、回帰領域判定部104は、最小人体サイズ40pxに所定の係数をかけた所定サイズ250pxより小さい回帰領域は、最小人体サイズ未満のサイズの物体を誤検出してしまうため、人数推定用の回帰領域として設定しないようにする。
表示部106は、人数推定部105による人数推定結果を、表示装置13に表示する。例えば、推定された回帰領域における人数推定結果を表示する。または、画像の位置ごとに推定人数が分かるように、回帰ベース人数推定時に分割した回帰領域ごとに、推定人数を表示してもよい。このように人数推定部105は、回帰領域に対して、特定物体の数を推定する回帰処理を施すことで特定物体の数を推定する推定手段として機能している。
ステップS301において、画像取得部101は、人数推定する画像を取得する。ステップS302において、人体サイズ取得部102は、人数推定する画像の人体サイズを取得する。ステップS303において、回帰領域作成部103は、ステップS302で取得した人体サイズに基づいて、暫定的な回帰領域を作成する。ステップS304において、回帰領域判定部104は、回帰領域作成部103が作成した暫定的な回帰領域が、検出対象とする最小人体サイズの縦または横の幅に所定の係数をかけた所定サイズより小さいか否かを判定する。
なお、ステップS305において人数推定のための回帰領域が設定されなかった画像領域に対して、検出対象とする最小人体サイズに所定の係数をかけた所定サイズの回帰領域を人数推定のための回帰領域として再設定しても良い。
あるいは、検出対象とする最小人体サイズに対応した所定サイズの回帰領域を、人数推定のための回帰領域として設定した場合に終了と判断しても良い。
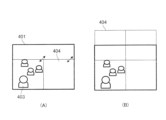
図4(A)は、回帰領域作成部103によって、人体サイズ取得部102から取得した、人体サイズのパラメータを用いて回帰領域サイズと人体サイズとの比率ができるだけほぼ一定となるように暫定的な回帰領域を設定した時の例である。
このように、画像上の人体サイズを取得し、検出対象とする最小人体サイズに合わせた所定サイズ以上の回帰領域を用いて画像を分割して人数推定のための回帰領域を設定する。それによって、図4(A)に比べ、図4(B)、(C)は、人数推定のための回帰領域の数を削減することができる。
図5(A)は、回帰領域作成部103によって作成した、図4(A)に示すような暫定的な回帰領域を回帰領域判定部104によって拡大した場合の例である。例えば、回帰領域作成部103が作成した暫定的な回帰領域のサイズが200pxとする。人数推定部105の回帰領域サイズと人体サイズとの比率が0.2で、検出できる人体サイズの範囲比率が、0.16~0.24で検出可能とする。この場合、サイズが200pxである当該回帰領域から検出できる人体サイズは32px~48pxとなる。画像内の任意の位置における人体サイズが35px~40pxの場合に、検出対象とする最小人体サイズを35pxと考えると、回帰領域サイズを216pxとしても、検出できる人体サイズは35px~52pxの範囲で検出が可能である。
また、検出対象とする最小人体サイズを仮にユーザが予め設定した40pxである場合を想定する。このとき上述したように、回帰領域のサイズに対して検出できる人体サイズの範囲比率が0.16~0.24とすると、回帰領域サイズを250pxとしても、検出できる人体サイズは40px~60pxの範囲で検出が可能である。このため、検出対象とする最小人体サイズに基づき、200pxである回帰領域のサイズを250pxまで拡大して設定することができる。
図5(B)は、ステップS305で暫定的な回帰領域が人数推定のための回帰領域として設定されなかった画像領域(画面上部の領域)や、それ以外の画像領域に対しても、拡大した回帰領域404を人数推定のための回帰領域として設定した場合の例である。これにより、回帰領域数を削減し、かつ画像全体の人体の数を推定することが可能になる。
<実施例2>
例えば、表示装置13や入力装置14等を用いたユーザによるマニュアル設定操作や画像認識によって、人数推定を実施するための解析領域を画像に対して1つ以上設定する。そして、解析領域ごとに、人体サイズ取得部102によって、検出対象とする最小人体サイズを取得する。そして、回帰領域作成部103、回帰領域判定部104により、設定した各解析領域における最小人体サイズに合わせて、直接的に人数推定のための回帰領域を作成しても良い。なお、ここでの解析領域ごとの最小人体サイズとは、人体サイズ取得部102によって取得された人体サイズのうち解析領域各々で映る最小の人体サイズであってもよいし、解析領域各々に対してユーザに設定された検出対象とする最小人体サイズでもよい。
以上のような実施形態によれば、取得した最小人体サイズに所定の係数をかけた所定サイズより小さい回帰領域を人数推定のための回帰領域として設定しないように制御することによって、人数推定のための演算に用いる回帰領域の数を削減することができる。
なお、上述した実施形態では、推定の対象(特定物体)として人を例にとって説明を行った。しかし、人以外の例えば動物や自動車、自転車、微生物等の任意の特定物体に適用することで、上述した実施形態の構成、情報処理を任意の特定物体の数の推定に利用することができる。
なお、本実施例における制御の一部または全部を上述した実施例の機能を実現するコンピュータプログラムをネットワーク又は各種記憶媒体を介して画像処理装置に供給するようにしてもよい。そしてその画像処理装置におけるコンピュータ(又はCPUやMPU等)がプログラムを読み出して実行するようにしてもよい。その場合、そのプログラム、及び該プログラムを記憶した記憶媒体は本発明を構成することとなる。
10:CPU
401:画像
402:(暫定的な)回帰領域
403:人体
Claims (11)
- 画像を取得する画像取得手段と、
前記画像における特定物体のサイズを取得するサイズ取得手段と、
前記サイズ取得手段によって取得された前記特定物体のサイズに基づき、前記画像を複数の画像領域に分割して、前記特定物体の数を推定するための回帰領域を設定すると共に、検出対象とする前記特定物体の最小サイズに対応した所定サイズより小さい画像領域が、前記回帰領域として設定されないようにする設定手段と、
設定された前記回帰領域に対して、前記特定物体の数を推定する回帰処理を施すことで前記画像に含まれる前記特定物体の数を推定する推定手段と、を有することを特徴とする画像処理装置。 - 前記設定手段は、前記所定サイズより小さい画像領域に対して、前記所定サイズの画像領域を、前記回帰領域として設定することを特徴とする請求項1に記載の画像処理装置。
- 前記設定手段は、前記所定サイズより小さい画像領域に対して、前記所定サイズより大きい画像領域を、前記回帰領域として設定することを特徴とする請求項1に記載の画像処理装置。
- 前記画像を分割した候補領域を作成する作成手段と、
前記候補領域のサイズを判定する判定手段と、を更に有し、
前記設定手段は、前記判定手段により前記候補領域のサイズが所定サイズよりも小さいと判定された当該候補領域に前記所定サイズより小さい回帰領域を設定しないようにすることを特徴とする請求項1に記載の画像処理装置。 - 前記設定手段は、前記候補領域のサイズが所定サイズよりも小さいと判定された当該候補領域に対して、前記所定サイズの画像領域を、前記回帰領域として設定することを特徴とする請求項4に記載の画像処理装置。
- 前記設定手段は、前記候補領域のサイズが所定サイズよりも小さいと判定された当該候補領域に対して、前記所定サイズより大きい画像領域を、前記回帰領域として設定することを特徴とする請求項4に記載の画像処理装置。
- 前記サイズ取得手段は、前記画像に対して解析領域を設定し、前記解析領域ごとに前記最小サイズを取得するものであることを特徴とする請求項1乃至6のいずれか1項に記載の画像処理装置。
- 前記推定手段は、前記回帰領域を固定サイズにリサイズした画像を、固定サイズの画像に含まれる人数を推定する学習済みモデルに入力することにより、前記画像に含まれる前記特定物体の数を推定することを特徴とする請求項1乃至7のいずれか1項に記載の画像処理装置。
- 画像を取得する画像取得工程と、
前記画像における特定物体のサイズを取得するサイズ取得工程と、
前記サイズ取得工程において取得された前記特定物体のサイズに基づき、前記画像を複数の画像領域に分割して、前記特定物体の数を推定するための回帰領域を設定すると共に、検出対象とする前記特定物体の最小サイズに対応した所定サイズより小さい画像領域が、前記回帰領域として設定されないようにする設定工程と、
設定された前記回帰領域に対して、前記特定物体の数を推定する回帰処理を施すことで前記画像に含まれる前記特定物体の数を推定する推定工程と、を有することを特徴とする画像処理方法。 - 請求項1~8のうちいずれか1項に記載の前記画像処理装置の各手段としてコンピュータを機能させるためのコンピュータプログラム。
- 請求項10に記載のコンピュータプログラムを記憶したコンピュータで読み取り可能な記憶媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019222310A JP7370840B2 (ja) | 2019-12-09 | 2019-12-09 | 画像処理装置、画像処理方法、コンピュータプログラム及び記憶媒体 |
| US17/090,148 US11568557B2 (en) | 2019-12-09 | 2020-11-05 | Person counting image processing apparatus, method, and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019222310A JP7370840B2 (ja) | 2019-12-09 | 2019-12-09 | 画像処理装置、画像処理方法、コンピュータプログラム及び記憶媒体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021092918A JP2021092918A (ja) | 2021-06-17 |
| JP2021092918A5 JP2021092918A5 (ja) | 2022-11-18 |
| JP7370840B2 true JP7370840B2 (ja) | 2023-10-30 |
Family
ID=76209801
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019222310A Active JP7370840B2 (ja) | 2019-12-09 | 2019-12-09 | 画像処理装置、画像処理方法、コンピュータプログラム及び記憶媒体 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US11568557B2 (ja) |
| JP (1) | JP7370840B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112203223B (zh) | 2020-12-02 | 2021-03-02 | 北京大唐高鸿数据网络技术有限公司 | 一种位置确定方法、装置及车联网设备 |
| JP7547415B2 (ja) * | 2022-06-22 | 2024-09-09 | キヤノン株式会社 | 情報処理装置、情報処理方法及びプログラム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016206995A (ja) | 2015-04-23 | 2016-12-08 | キヤノン株式会社 | 画像処理装置、画像処理方法、及びプログラム |
| JP2018022340A (ja) | 2016-08-03 | 2018-02-08 | キヤノン株式会社 | 画像処理装置、情報処理方法及びプログラム |
| JP2018124629A (ja) | 2017-01-30 | 2018-08-09 | キヤノン株式会社 | 画像処理装置、情報処理方法及びプログラム |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7965866B2 (en) * | 2007-07-03 | 2011-06-21 | Shoppertrak Rct Corporation | System and process for detecting, tracking and counting human objects of interest |
| US9165190B2 (en) * | 2012-09-12 | 2015-10-20 | Avigilon Fortress Corporation | 3D human pose and shape modeling |
| JP6478777B2 (ja) | 2015-04-13 | 2019-03-06 | キヤノン株式会社 | 制御装置及びその制御方法、プログラム |
| TWI636403B (zh) * | 2016-03-24 | 2018-09-21 | 晶睿通訊股份有限公司 | 人流計數之驗證方法、系統及電腦可讀取儲存媒體 |
| JP6843557B2 (ja) * | 2016-08-30 | 2021-03-17 | キヤノン株式会社 | システム、情報処理装置、情報処理方法及びプログラム |
| KR101996417B1 (ko) * | 2016-12-30 | 2019-07-04 | 현대자동차주식회사 | 자세 정보 기반 보행자 탐지 및 보행자 충돌 방지 장치 및 방법 |
| US11019251B2 (en) * | 2017-01-30 | 2021-05-25 | Canon Kabushiki Kaisha | Information processing apparatus, image capturing apparatus, information processing method, and recording medium storing program |
| JP7299692B2 (ja) | 2018-12-05 | 2023-06-28 | キヤノン株式会社 | 画像処理装置、画像処理システム、画像処理装置の制御方法、及び、プログラム |
| JP7329967B2 (ja) | 2019-05-23 | 2023-08-21 | キヤノン株式会社 | 画像処理装置、システム、画像処理装置の制御方法、及び、プログラム |
-
2019
- 2019-12-09 JP JP2019222310A patent/JP7370840B2/ja active Active
-
2020
- 2020-11-05 US US17/090,148 patent/US11568557B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016206995A (ja) | 2015-04-23 | 2016-12-08 | キヤノン株式会社 | 画像処理装置、画像処理方法、及びプログラム |
| JP2018022340A (ja) | 2016-08-03 | 2018-02-08 | キヤノン株式会社 | 画像処理装置、情報処理方法及びプログラム |
| JP2018124629A (ja) | 2017-01-30 | 2018-08-09 | キヤノン株式会社 | 画像処理装置、情報処理方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US11568557B2 (en) | 2023-01-31 |
| JP2021092918A (ja) | 2021-06-17 |
| US20210174532A1 (en) | 2021-06-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6942488B2 (ja) | 画像処理装置、画像処理システム、画像処理方法、及びプログラム | |
| JP6779699B2 (ja) | 画像処理装置、情報処理方法及びプログラム | |
| KR102199094B1 (ko) | 관심객체 검출을 위한 관심영역 학습장치 및 방법 | |
| JP2019114821A (ja) | 監視システム、装置、方法およびプログラム | |
| CN112991159B (zh) | 人脸光照质量评估方法、系统、服务器与计算机可读介质 | |
| JP7370840B2 (ja) | 画像処理装置、画像処理方法、コンピュータプログラム及び記憶媒体 | |
| JPWO2020111139A1 (ja) | 座標算出装置、座標算出方法、及びプログラム | |
| JP7309392B2 (ja) | 画像処理装置、画像処理方法およびプログラム | |
| US12374117B2 (en) | Method, system and computer readable media for object detection coverage estimation | |
| KR20140109954A (ko) | 타깃 사이즈를 추정하기 위한 시스템 및 방법 | |
| CN109740409A (zh) | 信息处理装置及方法、摄像装置、照相机系统和存储介质 | |
| WO2023171184A1 (ja) | 動画像集約装置、動画像集約方法、及び動画像集約プログラム | |
| TWI671707B (zh) | 影像分析方法、電子系統以及非暫態電腦可讀取記錄媒體 | |
| CN117974475B (zh) | 四维超声内镜观测下病灶影像融合方法及系统 | |
| EP4439464A1 (en) | Information processing apparatus, orientation estimation method, program, and storage medium | |
| JP6995960B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP2020095651A (ja) | 生産性評価システム、生産性評価装置、生産性評価方法、及びプログラム | |
| JP7554568B2 (ja) | 推定装置、推定方法、推定プログラム及び学習装置 | |
| JP7314244B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP7686406B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| JP7673869B2 (ja) | 学習プログラム、生成プログラム、学習方法および生成方法 | |
| JP2019098168A (ja) | 肌解析方法及び肌解析システム | |
| JP2004030006A (ja) | 眼検出装置、眼検出プログラム、そのプログラムを記録する記録媒体及び眼検出方法 | |
| CN114092883B (zh) | 人群信息的获取方法及其装置、计算机可读存储介质 | |
| JP2020184155A (ja) | 画像処理装置、画像処理方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221109 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221109 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230908 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230919 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231018 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7370840 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |