JP7402006B2 - アクチュエータ - Google Patents
アクチュエータ Download PDFInfo
- Publication number
- JP7402006B2 JP7402006B2 JP2019179721A JP2019179721A JP7402006B2 JP 7402006 B2 JP7402006 B2 JP 7402006B2 JP 2019179721 A JP2019179721 A JP 2019179721A JP 2019179721 A JP2019179721 A JP 2019179721A JP 7402006 B2 JP7402006 B2 JP 7402006B2
- Authority
- JP
- Japan
- Prior art keywords
- movable body
- yoke
- coil
- pair
- support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000035807 sensation Effects 0.000 claims description 2
- BGPVFRJUHWVFKM-UHFFFAOYSA-N N1=C2C=CC=CC2=[N+]([O-])C1(CC1)CCC21N=C1C=CC=CC1=[N+]2[O-] Chemical compound N1=C2C=CC=CC2=[N+]([O-])C1(CC1)CCC21N=C1C=CC=CC1=[N+]2[O-] BGPVFRJUHWVFKM-UHFFFAOYSA-N 0.000 description 17
- 230000001133 acceleration Effects 0.000 description 3
- 239000000853 adhesive Substances 0.000 description 3
- 230000001070 adhesive effect Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000010008 shearing Methods 0.000 description 3
- 238000003466 welding Methods 0.000 description 3
- 230000008602 contraction Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 229920003244 diene elastomer Polymers 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000010287 polarization Effects 0.000 description 2
- 229920001296 polysiloxane Polymers 0.000 description 2
- 229920002943 EPDM rubber Polymers 0.000 description 1
- 229920000181 Ethylene propylene rubber Polymers 0.000 description 1
- 244000043261 Hevea brasiliensis Species 0.000 description 1
- 229920000459 Nitrile rubber Polymers 0.000 description 1
- 239000005062 Polybutadiene Substances 0.000 description 1
- 229920006311 Urethane elastomer Polymers 0.000 description 1
- 229920005549 butyl rubber Polymers 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- -1 etc.) Polymers 0.000 description 1
- 229920001973 fluoroelastomer Polymers 0.000 description 1
- 229920003049 isoprene rubber Polymers 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 229920003052 natural elastomer Polymers 0.000 description 1
- 229920001194 natural rubber Polymers 0.000 description 1
- CLNYHERYALISIR-UHFFFAOYSA-N nona-1,3-diene Chemical compound CCCCCC=CC=C CLNYHERYALISIR-UHFFFAOYSA-N 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 229920001084 poly(chloroprene) Polymers 0.000 description 1
- 229920002857 polybutadiene Polymers 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000005060 rubber Substances 0.000 description 1
- 229920002379 silicone rubber Polymers 0.000 description 1
- 239000004945 silicone rubber Substances 0.000 description 1
- 229920003048 styrene butadiene rubber Polymers 0.000 description 1
- 229920002725 thermoplastic elastomer Polymers 0.000 description 1
Images










Landscapes
- Reciprocating, Oscillating Or Vibrating Motors (AREA)
Description
ることができる。
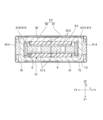
図1は、本発明の実施形態1に係るアクチュエータ1の外観斜視図である。図2は、図1のアクチュエータ1の分解斜視図である。図3は、図1のアクチュエータ1の断面図である。図4は、ケース9を取り外したアクチュエータ1を第1方向Zの他方側Z2から見た分解斜視図である。図5は、ケース9を取り外したアクチュエータ1を第1方向Zの一方側Z1から見た分解斜視図である。図6は、コイル6、コイルホルダ7および回路基板11の分解斜視図である。図7は、コイルホルダ7、接続体4および磁気駆動回路10の平面図である。
図1および図2に示すように、本発明の実施形態1のアクチュエータは、多角形のケース9を含む支持体2と、ケース9の内部に収容された可動体3とを有する。図3に示すように、可動体3は、可動体3と支持体2との間に配置された接続体4を介して、支持体2に支持される。接続体4は、弾性体または粘弾性体からなり、可動体3は、支持体2に対して、第2方向Xおよび第3方向Yに相対的に移動可能に支持される。本形態では、接続
体4は粘弾性体からなる。
図4および図5に示すように、可動体3において、磁石5は、第1磁石51および第2磁石52を有する。第1磁石51は、コイル6に第1方向Zの一方側Z1で対向する。第2磁石52は、コイル6に第1方向Zの他方側Z2で対向する。第1磁石51および第2磁石52において、少なくともコイル6と対向する面は、第2方向Xおよび第3方向Yと交差する第4方向Fの一方側と他方側とが異なる極に着磁されている。本形態において、第1磁石51の少なくともコイル6と対向する面は、第2方向Xの一方側X1かつ第3方向Yの他方側Y2がN極に着磁され、第2方向Xの他方側X2かつ第3方向Yの一方側Y1がS極が着磁されている。これに対して、第2磁石52の少なくともコイル6と対向する面は、第2方向Xの他方側X2かつ第3方向Yの一方側Y1がN極に着磁され、第2方向Xの一方側X1かつ第3方向Yの他方側Y2がS極に着磁されている。従って、第1磁石51と第2磁石52とにおいて、コイル6を介して互いに対向する面は異なる極になっている。本形態では、磁気駆動回路10を2組有するため、第1磁石51および第2磁石52は、第4方向Fに傾いた状態で第3方向Yに2個並んでいる。
状の第2板部821を有する。
図1および図2に示すように、支持体2において、ケース9は、第1ケース部材91と、第2ケース部材92とを有する。第1ケース部材91と第2ケース部材92との間には、可動体3、コイル6およびコイルホルダ7が収容される。ケース9の第2方向Xの一方側X1の側面には、開口部93が形成され、開口部93から回路基板11が露出する。第1ケース部材91は、第3方向Yを向く底板部911と、底板部911の端縁から第3方向Yの他方側Y2に突出する側板部912とを有する。底板部911には、2つの貫通穴913が設けられる。第2方向Xの一方側X1の側板部912の中央部分には、切り欠き部914が設けられる。同様に、第2ケース部材92は、第3方向Yを向く底板部921と、底板部921の端縁から第3方向Yの一方側Y1に突出する側板部922とを有する。底板部921には、2つの貫通穴923が設けられる。第2方向Xの一方側X1の側板部922の中央部には、切り欠き部924が設けられる。本形態では、第1ケース部材91の側板部912、および第2ケース部材92の側板部922のうち、第2方向Xにおいて対向する部分によって、支持体2の一対の第1側辺部21が構成される。また、第1ケース部材91の底板部911、および第2ケース部材92の底板部921によって、支持体2の一対の第2側辺部22が構成される。
および可動体3の形状に対して、コイル6の長手方向が第4方向Fに直交する第5方向Gとなっているので、長手方向が第2方向Xまたは第3方向Yに延びるコイルと比べて、本形態のコイル6の長手方向は大きい。コイル6は、直線部分61と曲線部分62とを有する。直線部分61は、第4方向Fに直交する第5方向Gに延びる。コイル6は、第2方向Xの一方側X1から引き出された引き出し部分63を有する。引き出し部分63は、回路基板11に電気的に接続する。
図2に示すように、可動体3は、可動体3および支持体2に接続された第1接続体41および第2接続体42によって、支持体2に対して第2方向Xおよび第3方向Yに相対移動可能に支持される。第1接続体41は、第1ケース部材91とヨーク8の第1連結部8121との間に配置され、接着剤等により固定される。第2接続体42は、第2ケース部材92とヨーク8の第2連結部8122との間に配置され、接着剤等により固定される。第1接続体41および第2接続体42は、第3方向Yに圧縮された状態にある。
図7に示すように、アクチュエータ1は、磁石5と長円形のコイル6の対からなる磁気駆動回路10を2組有する。各磁気駆動回路10は、第2方向Xおよび第3方向Yを含む面内方向であって、第2方向Xおよび第3方向Yとは異なる第4方向Fに働く駆動力を発生させる。例えば、第4方向Fは、第2方向Xおよび第3方向Yに対して45°傾いた方向である。各磁気駆動回路10において、磁石5は、コイル6と対向する面がN極とS極に着磁され、その着磁分極線50は、第4方向Fに対して直交する第5方向Gに延びる。本形態では、第4方向Fの方向に磁石5が着磁されている。第1磁石51および第2磁石
52は、第1方向Zから見たときに、第1方向Zで対向するコイル6の直線部分61の一部と重なるように配置される。
アクチュエータ1を組み立てる際に、可動体3およびコイルホルダ7をケース9に対して位置決め調整を行う。位置決めするために、位置決め用ピン(不図示)が貫通穴913または貫通穴923から第3方向Yに挿入される。この時、貫通穴913、923から挿入された位置決め用ピンの側面が、第1ヨーク81の切り欠き部814および第2ヨーク82の切り欠き部814と嵌合するとともに、位置決め用ピンの先端が、コイルホルダ7と第2方向Xにおいて当接する。この結果、位置決め用ピンの位置を調整することで、可動体3およびコイルホルダ7がケース9に対して位置決め調整することが可能となる。
図8は、アクチュエータ1の振動特性を模式的に示す説明図である。図8の横軸は磁気駆動回路10の駆動周波数fであり、コイル6へ流す駆動電流の周波数である。また、図8の縦軸は、可動体3が振動する際の加速度である。上記のように、アクチュエータ1は、可動体3が第2方向Xに振動する第1振動系を構成する場合と、可動体3が第3方向Yに振動する第2振動系を構成する場合とで、接続体4が全体として異なるばね定数で変形するように構成されている。そのため、アクチュエータ1は、第1振動系の共振周波数fAと、第2振動系の共振周波数fBとが異なり、図8に示すように、2つの共振周波数fA、fBで可動体3の加速度最大周波数が大きくなっている。
本形態では、支持体2は、第1方向Zと直交する第2方向Xにおいて対向する一対の第1側辺部21と、第1方向Zと直交するとともに第2方向Xと交差する第3方向Yにおいて対向する一対の第2側辺部22とを有する。磁気駆動回路10は、可動体3を支持体2に対し、第2方向Xおよび第3方向Yとは異なる第4方向Fに駆動する。コイル6は、第4方向Fに直交する第5方向Gに延びる長円形である。磁石5は、第4方向Fに着磁されている。したがって、磁気駆動回路10が第4方向Fに駆動するため、可動体3の移動距離(移動量)を大きく確保することができる。また、第2方向Xにおいて対向する一対の第1側辺部21と、第3方向Yにおいて対向する一対の第2側辺部22とを有する支持体2に対して、コイル6は第4方向Fに直交する第5方向Gに延びる長円形である。このため、コイル6が第2方向Xおよび第3方向Yの何れかに延びる長円形に比べて、コイル6の長手方向の長さを大きくすることができる。この結果、アクチュエータ1において、磁気駆動回路10が発生させる第4方向Fへの駆動力を大きくすることができる。
的に大きくすることができる。
図9は、本発明の実施形態2のヨーク8の斜視図である。図10は、実施形態2の第1ヨーク86の斜視図である。実施形態2では、上記形態のヨーク8の第1ヨーク81および第2ヨーク82の形状とは異なる形状であり、他の構成は同一である。
図11は、本発明の実施形態3のアクチュエータ1の断面図である。実施形態3は、上記形態2とは、接続体4の配置される位置が異なり、他の構成は同一である。図11に示すように、実施形態3では、接続体4は、第1接続体41と、第2接続体42とを有する。第1接続体41は、第2ヨーク87の連結部882の内側(第3方向Yの他方側Y2)において、第2ヨーク87の連結部882とコイルホルダ7との間に配置される。第2接続体42は、第1ヨーク86の連結部882の内側(第3方向Yの一方側Y1)において、第1ヨーク86の連結部882とコイルホルダ7との間に配置される。より具体的には、第1接続体41は、第2ヨーク87の連結部882と側壁723との間に配置される。第2接続体42は、第1ヨーク86の連結部882と側壁724との間に配置される。このようにすることで、ヨーク8が第3方向Yに大きくなり、ヨーク8の質量が増加する。この結果、可動体3の質量を増大することができるので、可動体3の移動距離(移動量)が同程度または小さくても、推力を向上または維持できる。また、ケース9に外力が加わっても、外力が直接接続体4に伝わらないため、接続体4の変形を抑制することができる。また、本形態の第1ヨーク86および第2ヨーク87の形状であれば、接続体4をヨーク8の内側に配置することが容易となる。
上記形態は、可動体3と支持体2とが第3方向Yで対向する位置に接続体4を配置するものであったが、接続体4の位置は、可動体3と支持体2とが第2方向Xで対向する位置であってもよい。また、接続体4を配置する位置を、可動体3と支持体2とが第2方向Xで対向する位置、および、可動体3と支持体2とが第3方向Yで対向する位置の両方としてもよい。
Claims (9)
- 支持体と、
可動体と、
前記支持体および前記可動体に接続された接続体と、
前記支持体および前記可動体の一方側に配置された磁石と、前記支持体および前記可動体の他方側に配置されるとともに、第1方向で前記磁石と対向するコイルとを有する磁気駆動回路とを備え、
前記支持体は、前記第1方向と直交する第2方向において対向する一対の第1側辺部と、前記第1方向および前記第2方向に対して交差する第3方向において対向する一対の第2側辺部と、を有し、
前記コイルは、前記第1方向から見たときに、前記第2方向および前記第3方向に対して斜めに交差する第4方向と直交する第5方向に延在する長円形であり、前記磁石は前記第4方向に着磁され、前記磁気駆動回路は、前記可動体を前記支持体に対して前記第4方向に駆動し、
前記接続体は、弾性体または粘弾性体であり、前記第2方向および前記第3方向の少なくともいずれか一方において前記支持体と前記可動体との間に配置され、
前記可動体は、ヨークを有し、
前記ヨークは、前記磁石を位置決めする位置決め部を有し、
前記ヨークは、前記第1方向で対向する一対の板部と、前記一対の板部の前記第2方向および前記第3方向の何れか一方の辺において前記一対の板部の間で前記一対の板部を連結する一対の連結部と、を有し、
前記位置決め部は、前記一対の板部の板部のそれぞれから突出する複数の半抜き加工部であり、
前記磁石は、前記半抜き加工部の間に嵌め込まれていることを特徴とするアクチュエータ。 - 請求項1において、
前記ヨークは、前記第1方向に重ねて配置された第1ヨークおよび第2ヨークからなり、
前記第1ヨークおよび前記第2ヨークは同一形状であることを特徴とするアクチュエータ。 - 支持体と、
可動体と、
前記支持体および前記可動体に接続された接続体と、
前記支持体および前記可動体の一方側に配置された磁石と、前記支持体および前記可動体の他方側に配置されるとともに、第1方向で前記磁石と対向するコイルとを有する磁気駆動回路とを備え、
前記支持体は、前記第1方向と直交する第2方向において対向する一対の第1側辺部と、前記第1方向および前記第2方向に対して交差する第3方向において対向する一対の第2側辺部と、を有し、
前記コイルは、前記第1方向から見たときに、前記第2方向および前記第3方向に対して斜めに交差する第4方向と直交する第5方向に延在する長円形であり、前記磁石は前記第4方向に着磁され、前記磁気駆動回路は、前記可動体を前記支持体に対して前記第4方向に駆動し、
前記接続体は、弾性体または粘弾性体であり、前記第2方向および前記第3方向の少なくともいずれか一方において前記支持体と前記可動体との間に配置され、
前記可動体は、ヨークを有し、
前記ヨークは、前記第1方向で対向する一対の板部と、前記一対の板部の前記第2方向および前記第3方向の何れか一方の辺において前記一対の板部の間で前記一対の板部を連結する一対の連結部と、を有し、
前記支持体は、前記一対の連結部の間で前記コイルを保持するコイルホルダを有し、
前記接続体は、前記一対の連結部と前記コイルホルダとの各間に配置されることを特徴とするアクチュエータ。 - 請求項3において、
前記コイルホルダは、前記コイルを収容する凹部を有することを特徴とするアクチュエータ。 - 支持体と、
可動体と、
前記支持体および前記可動体に接続された接続体と、
前記支持体および前記可動体の一方側に配置された磁石と、前記支持体および前記可動体の他方側に配置されるとともに、第1方向で前記磁石と対向するコイルとを有する磁気駆動回路とを備え、
前記支持体は、前記第1方向と直交する第2方向において対向する一対の第1側辺部と、前記第1方向および前記第2方向に対して交差する第3方向において対向する一対の第2側辺部と、を有し、
前記コイルは、前記第1方向から見たときに、前記第2方向および前記第3方向に対して斜めに交差する第4方向と直交する第5方向に延在する長円形であり、前記磁石は前記第4方向に着磁され、前記磁気駆動回路は、前記可動体を前記支持体に対して前記第4方向に駆動し、
前記接続体は、弾性体または粘弾性体であり、前記第2方向および前記第3方向の少なくともいずれか一方において前記支持体と前記可動体との間に配置され、
前記可動体は、ヨークを有し、
前記支持体は、前記可動体を収容するケースを有し、
前記ケースおよび前記ヨークは、前記第2方向および前記第3方向のうち、前記接続体が配置された方向に穴または切り欠き部を有することを特徴とするアクチュエータ。 - 請求項5において、
前記ヨークは、前記第1方向で対向する一対の板部と、前記一対の板部の前記第2方向
および前記第3方向の何れか一方の辺において前記一対の板部の間で前記一対の板部を連結する一対の連結部と、を有し、
前記支持体は、前記一対の連結部の間で前記コイルを保持するコイルホルダを有し、
前記ヨークに設けられた前記穴または前記切り欠き部は、前記ケースに設けられた前記穴または前記切り欠き部から挿入された位置決め用ピンが嵌合する位置に配置され、前記コイルホルダは、前記位置決め用ピンの先端が当接する位置に配置されることを特徴とするアクチュエータ。 - 請求項1、3、5のいずれか一項において、
前記コイルは、前記第1方向から見たときに前記第5方向に延在する直線部分を有し、
前記磁石は、前記第1方向から見たときに、前記コイルの前記直線部分の少なくとも一部と重なることを特徴とするアクチュエータ。 - 請求項1、3、5のいずれか一項において、
前記接続体は、前記可動体が前記支持体に対して前記第2方向に振動する第1振動系を構成し、かつ、前記可動体が前記支持体に対して前記第3方向に振動する第2振動系を構成し、
前記第1振動系の共振周波数と、前記第2振動系の共振周波数とが異なることを特徴とするアクチュエータ。 - 請求項1から8のいずれか一項において、
前記可動体が振動することにより触覚を与える触覚デバイスとして使用されることを特徴とするアクチュエータ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019179721A JP7402006B2 (ja) | 2019-09-30 | 2019-09-30 | アクチュエータ |
| CN202010476413.2A CN112018992B (zh) | 2019-05-31 | 2020-05-29 | 致动器及触觉设备 |
| CN202010474913.2A CN112018990B (zh) | 2019-05-31 | 2020-05-29 | 致动器以及触觉装置 |
| CN202010474946.7A CN112018991B (zh) | 2019-05-31 | 2020-05-29 | 致动器及触觉设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019179721A JP7402006B2 (ja) | 2019-09-30 | 2019-09-30 | アクチュエータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021057993A JP2021057993A (ja) | 2021-04-08 |
| JP7402006B2 true JP7402006B2 (ja) | 2023-12-20 |
Family
ID=75273076
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019179721A Active JP7402006B2 (ja) | 2019-05-31 | 2019-09-30 | アクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7402006B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7610626B2 (ja) * | 2022-09-08 | 2025-01-08 | エーエーシー マイクロテック(チャンヂョウ)カンパニー リミテッド | 多機能発音装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005227329A (ja) | 2004-02-10 | 2005-08-25 | Canon Inc | 振れ補正装置及び光学機器 |
| CN105048757A (zh) | 2015-08-18 | 2015-11-11 | 歌尔声学股份有限公司 | 一种振动马达和电子设备 |
| WO2018030265A1 (ja) | 2016-08-09 | 2018-02-15 | 日本電産サンキョー株式会社 | リニアアクチュエータ |
| CN108199555A (zh) | 2018-01-03 | 2018-06-22 | 瑞声科技(南京)有限公司 | 振动电机 |
| JP2018161047A (ja) | 2014-05-21 | 2018-10-11 | ミネベアミツミ株式会社 | 振動発生器 |
| JP2020511911A (ja) | 2018-03-02 | 2020-04-16 | 金竜機電股▲ふん▼有限公司 | 可動コイルリニア振動モーター |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05293441A (ja) * | 1992-04-17 | 1993-11-09 | Olympus Optical Co Ltd | 超音波振動子 |
| JP6253157B2 (ja) * | 2014-11-14 | 2017-12-27 | アルプス電気株式会社 | 振動発生装置 |
| JP6056883B2 (ja) * | 2015-01-23 | 2017-01-11 | ミツミ電機株式会社 | レンズ駆動装置、カメラモジュール、及びカメラ付き携帯端末 |
| JP2019013095A (ja) * | 2017-06-30 | 2019-01-24 | 日本電産サンキョー株式会社 | アクチュエータ |
-
2019
- 2019-09-30 JP JP2019179721A patent/JP7402006B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005227329A (ja) | 2004-02-10 | 2005-08-25 | Canon Inc | 振れ補正装置及び光学機器 |
| JP2018161047A (ja) | 2014-05-21 | 2018-10-11 | ミネベアミツミ株式会社 | 振動発生器 |
| CN105048757A (zh) | 2015-08-18 | 2015-11-11 | 歌尔声学股份有限公司 | 一种振动马达和电子设备 |
| WO2018030265A1 (ja) | 2016-08-09 | 2018-02-15 | 日本電産サンキョー株式会社 | リニアアクチュエータ |
| CN108199555A (zh) | 2018-01-03 | 2018-06-22 | 瑞声科技(南京)有限公司 | 振动电机 |
| JP2020511911A (ja) | 2018-03-02 | 2020-04-16 | 金竜機電股▲ふん▼有限公司 | 可動コイルリニア振動モーター |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021057993A (ja) | 2021-04-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110800200B (zh) | 致动器 | |
| JP7007911B2 (ja) | リニアアクチュエータ | |
| CN112018992B (zh) | 致动器及触觉设备 | |
| JP2022170145A (ja) | アクチュエータ | |
| JP6944288B2 (ja) | アクチュエータ | |
| CN110495081A (zh) | 致动器 | |
| JP7781600B2 (ja) | アクチュエータ | |
| JP2022170144A (ja) | アクチュエータ | |
| JP2020162393A (ja) | アクチュエータ | |
| US11070120B2 (en) | Actuator | |
| JP7252720B2 (ja) | アクチュエータ | |
| WO2019003874A1 (ja) | アクチュエータ | |
| CN109565233A (zh) | 振动产生装置 | |
| US11323015B2 (en) | Actuator | |
| JP6858088B2 (ja) | アクチュエータ | |
| JP7410705B2 (ja) | アクチュエータおよび触覚デバイス | |
| JP7402006B2 (ja) | アクチュエータ | |
| JP7325225B2 (ja) | アクチュエータ | |
| JP2021030188A (ja) | 電子機器 | |
| JP7267551B2 (ja) | アクチュエータ | |
| JP7530225B2 (ja) | アクチュエータおよび触覚デバイス | |
| JP2018073020A (ja) | タッチパネル付き表示装置 | |
| JP2019037015A (ja) | アクチュエータ | |
| JP2019034252A (ja) | アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220901 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230608 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230620 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230810 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230905 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231102 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231208 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7402006 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |