JP7425864B2 - グリッパー - Google Patents
グリッパー Download PDFInfo
- Publication number
- JP7425864B2 JP7425864B2 JP2022518694A JP2022518694A JP7425864B2 JP 7425864 B2 JP7425864 B2 JP 7425864B2 JP 2022518694 A JP2022518694 A JP 2022518694A JP 2022518694 A JP2022518694 A JP 2022518694A JP 7425864 B2 JP7425864 B2 JP 7425864B2
- Authority
- JP
- Japan
- Prior art keywords
- gripping
- gripper
- cam
- assembly
- drive mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
- B25J15/12—Gripping heads and other end effectors having finger members with flexible finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
- B25J15/0206—Gripping heads and other end effectors servo-actuated comprising articulated grippers
- B25J15/0226—Gripping heads and other end effectors servo-actuated comprising articulated grippers actuated by cams
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/908—Devices for picking-up and depositing articles or materials with inflatable picking-up means
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Manipulator (AREA)
Description
本願は、2019年9月20日に出願された中国出願番号201921572514.9及び2019年9月20日に出願された中国出願番号201910894001.8に対する優先権を主張するものであり、その全体は参照により本明細書に組み込まれるものとする。
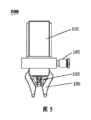
110 ハウジング、
120 駆動機構、
130 接続アセンブリ、
140、140’ 位置決め軸、
150 グリップ爪アセンブリ、
160 離脱補助装置、
121 シリンダケース、
122 シリンダピストンロッド、
123 シリンダホルダ、
124 取付ナット、
125 締付ナット、
131 接続ロッド、
132 カム、
133 スライダ、
151 グリップ爪接続部材
Claims (12)
- ハウジングと、
前記ハウジング内に収容される駆動機構と、
前記ハウジングの外部に部分的に設置され、少なくとも2つのグリップ爪を含むグリップ爪アセンブリと、
一端が前記駆動機構に接続され、他端が前記グリップ爪アセンブリに接続される接続アセンブリと、を含み、
前記駆動機構は、前記グリップ爪アセンブリを動かして動作することにより、前記グリップ爪アセンブリを第1の変形状態と第2の変形状態との間で切り替えることができ、
前記第1の変形状態では、前記少なくとも2つのグリップ爪は互いに接近し、前記第2の変形状態では、前記少なくとも2つのグリップ爪は互いに分離し、
前記接続アセンブリは、カム部及び接続ロッドを含み、前記接続ロッドの一端は、前記駆動機構に接続され、前記接続ロッドの他端は、前記カム部に接続され、前記カム部は、前記グリップ爪アセンブリに当接し、
前記駆動機構が前記接続ロッドを駆動する場合、前記カム部の回転により、前記グリップ爪アセンブリを動かして前記第1の変形状態と前記第2の変形状態との間で切り替えることができることを特徴とする、グリッパー。 - 前記グリップ爪アセンブリのうちの少なくとも1つのグリップ爪は、可撓性材料を少なくとも部分的に含むことを特徴とする、請求項1に記載のグリッパー。
- 前記接続ロッドは、前記カム部と噛合接続され、前記接続ロッドは、第1の歯部を含み、前記カム部は、第2の歯部を含み、前記第1の歯部と前記第2の歯部が噛み合うことにより前記カム部を回転させることを特徴とする、請求項2に記載のグリッパー。
- 前記カム部は、カムを含み、前記カムは、第2の歯部を含み、前記第1の歯部と前記第2の歯部が噛み合うことにより前記カムを回転させることを特徴とする、請求項3に記載のグリッパー。
- 前記カム部は、同軸に固定されたカム及び歯車を含み、前記歯車は、第2の歯部を含み、前記第1の歯部と前記第2の歯部が噛み合うことにより前記カムを回転させることを特徴とする、請求項3に記載のグリッパー。
- 前記接続アセンブリは、接続部材を含み、前記接続部材の一端は、前記駆動機構に固定接続され、前記接続部材の他端は、前記少なくとも2つのグリップ爪に固定接続されることを特徴とする、請求項1に記載のグリッパー。
- 前記少なくとも2つのグリップ爪を前記ハウジングに回転可能に固定する位置決め軸をさらに含み、前記グリップ爪アセンブリが前記第1の変形状態から前記第2の変形状態に切り替えられると、前記少なくとも2つのグリップ爪が前記位置決め軸の周りを回転することができることを特徴とする、請求項1に記載のグリッパー。
- 前記位置決め軸の数は、前記グリップ爪アセンブリのグリップ爪の数と同じであることを特徴とする、請求項7に記載のグリッパー。
- 前記グリップ爪の数は、2つ、3つ又は4つを含むことを特徴とする、請求項1に記載のグリッパー。
- 前記駆動機構は、直線駆動機構を含むことを特徴とする、請求項1に記載のグリッパー。
- 前記直線駆動機構は、シリンダピストン式駆動機構を含むことを特徴とする、請求項10に記載のグリッパー。
- 離脱補助装置をさらに含み、
前記離脱補助装置は、前記グリッパーに設置され、使用状態で、給排気装置に接続されるガス噴出構造を含み、
あるいは、前記離脱補助装置は、前記グリッパーに設置される伸縮可能なプッシュロッドを含み、
あるいは、前記離脱補助装置は、前記グリッパーが設置される振動装置を含むことを特徴とする、請求項1に記載のグリッパー。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921572514.9U CN210650716U (zh) | 2019-09-20 | 2019-09-20 | 一种夹具 |
| CN201910894001.8 | 2019-09-20 | ||
| CN201921572514.9 | 2019-09-20 | ||
| CN201910894001.8A CN110497434B (zh) | 2019-09-20 | 2019-09-20 | 一种夹具 |
| PCT/CN2020/116077 WO2021052448A1 (zh) | 2019-09-20 | 2020-09-18 | 一种夹具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022549302A JP2022549302A (ja) | 2022-11-24 |
| JP7425864B2 true JP7425864B2 (ja) | 2024-01-31 |
Family
ID=74883898
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022518694A Active JP7425864B2 (ja) | 2019-09-20 | 2020-09-18 | グリッパー |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12491644B2 (ja) |
| EP (1) | EP4015165A4 (ja) |
| JP (1) | JP7425864B2 (ja) |
| WO (1) | WO2021052448A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113509244B (zh) * | 2021-05-24 | 2022-10-21 | 武汉联影智融医疗科技有限公司 | 一种穿刺装置和穿刺系统 |
| CN115402780B (zh) * | 2022-09-20 | 2024-06-18 | 太原理工大学 | 一种用于取酒醅的取料器夹爪 |
| CN115872149A (zh) * | 2022-12-13 | 2023-03-31 | 珠海格力智能装备有限公司 | 一种便携式上料装置 |
| CN117484121A (zh) * | 2023-11-06 | 2024-02-02 | 全时代智慧科技(浙江)股份有限公司 | 一种球阀高精度自动装阀杆装置 |
| CN120736254B (zh) * | 2025-08-28 | 2025-11-14 | 山东佳润智能科技有限公司 | 一种耐火砖立砖输送码垛机器人 |
| CN120901910B (zh) * | 2025-10-09 | 2025-12-16 | 沈阳吕尚科技有限公司 | 一种全地形防爆机器人 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009297886A (ja) | 2008-06-17 | 2009-12-24 | Kitagawa Iron Works Co Ltd | ワーク把持装置 |
| CN106584498A (zh) | 2016-11-23 | 2017-04-26 | 西北工业大学 | 一种空间目标抓捕机构及方法 |
| JP2019018304A (ja) | 2017-07-20 | 2019-02-07 | アイシン精機株式会社 | 把持ハンド |
| DE102018203788A1 (de) | 2018-03-13 | 2019-09-19 | Robert Bosch Gmbh | Vorrichtung zum Greifen zumindest eines Objekts, insbesondere eines pharmazeutischen Behältnisses |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4002245A (en) * | 1974-09-16 | 1977-01-11 | George Mink | Material handling apparatus having gripping means for moving articles in several directions |
| US4211123A (en) * | 1978-03-13 | 1980-07-08 | Mack Corporation | Motion conversion mechanism |
| JPH01106185U (ja) * | 1988-01-09 | 1989-07-17 | ||
| JPH0852679A (ja) * | 1994-08-08 | 1996-02-27 | Kaijo Corp | 微小物品の保持装置 |
| US5895084A (en) * | 1997-02-19 | 1999-04-20 | Mauro; George | Cam operated microgripper |
| JP3292715B2 (ja) | 1999-10-12 | 2002-06-17 | エスエムシー株式会社 | 緩衝機能付き電動ハンド |
| KR100680893B1 (ko) * | 2003-01-15 | 2007-02-09 | 미쓰비시덴키 가부시키가이샤 | 전동 핀셋 |
| CN100408273C (zh) * | 2003-05-26 | 2008-08-06 | 三菱电机株式会社 | 电动镊子 |
| DE102005014838A1 (de) | 2005-03-30 | 2006-10-05 | Krones Ag | Klammer zum Halten von Gefäßen |
| DE502007000672D1 (de) * | 2007-03-14 | 2009-06-10 | Wafios Ag | Greifvorrichtung zum Ergreifen und Haltern länglicher Werkstücke, insbesondere bei Biegemaschinen |
| US9075031B2 (en) * | 2011-10-11 | 2015-07-07 | Ortho-Clinical Diagnostics, Inc. | Apparatus for gripping and holding diagnostic cassettes |
| JP5681271B1 (ja) * | 2013-07-26 | 2015-03-04 | ファナック株式会社 | ロボット用把持装置 |
| US9914214B1 (en) * | 2016-02-22 | 2018-03-13 | X Development Llc | Preshaping for underactuated fingers |
| CN107671878B (zh) * | 2017-11-16 | 2020-11-03 | 重庆大学 | 一种仿鱼鳍结构的静电吸附式软体抓手 |
| CN207643173U (zh) | 2017-11-30 | 2018-07-24 | 浙江机电职业技术学院 | 一种稳定型机械手结构 |
| US10682774B2 (en) * | 2017-12-12 | 2020-06-16 | X Development Llc | Sensorized robotic gripping device |
| JP7039328B2 (ja) | 2018-02-27 | 2022-03-22 | ニッタ株式会社 | 把持装置及び産業用ロボット |
| CN108638115A (zh) * | 2018-05-22 | 2018-10-12 | 苏州乔岳软件有限公司 | 一种柔性夹爪 |
| CN109397316A (zh) | 2018-10-12 | 2019-03-01 | 揭阳市腾晟科技咨询有限公司 | 一种机械手结构 |
| CN110076808A (zh) * | 2019-04-23 | 2019-08-02 | 苏州软体机器人科技有限公司 | 一种外夹式夹具 |
| CN110497434B (zh) * | 2019-09-20 | 2023-06-30 | 北京软体机器人科技股份有限公司 | 一种夹具 |
| CN210650716U (zh) * | 2019-09-20 | 2020-06-02 | 苏州软体机器人科技有限公司 | 一种夹具 |
| US20240326207A1 (en) * | 2022-07-29 | 2024-10-03 | Black & Decker Inc. | Crimping and/or pinching accessory for power tool |
-
2020
- 2020-09-18 JP JP2022518694A patent/JP7425864B2/ja active Active
- 2020-09-18 EP EP20864365.0A patent/EP4015165A4/en active Pending
- 2020-09-18 WO PCT/CN2020/116077 patent/WO2021052448A1/zh not_active Ceased
-
2022
- 2022-03-18 US US17/655,545 patent/US12491644B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009297886A (ja) | 2008-06-17 | 2009-12-24 | Kitagawa Iron Works Co Ltd | ワーク把持装置 |
| CN106584498A (zh) | 2016-11-23 | 2017-04-26 | 西北工业大学 | 一种空间目标抓捕机构及方法 |
| JP2019018304A (ja) | 2017-07-20 | 2019-02-07 | アイシン精機株式会社 | 把持ハンド |
| DE102018203788A1 (de) | 2018-03-13 | 2019-09-19 | Robert Bosch Gmbh | Vorrichtung zum Greifen zumindest eines Objekts, insbesondere eines pharmazeutischen Behältnisses |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022549302A (ja) | 2022-11-24 |
| EP4015165A1 (en) | 2022-06-22 |
| US20220203558A1 (en) | 2022-06-30 |
| US12491644B2 (en) | 2025-12-09 |
| WO2021052448A1 (zh) | 2021-03-25 |
| EP4015165A4 (en) | 2022-10-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7425864B2 (ja) | グリッパー | |
| CN110497434B (zh) | 一种夹具 | |
| CN210650716U (zh) | 一种夹具 | |
| CN210525116U (zh) | 一种具有主动伸缩结构的内撑式夹具 | |
| CN203495949U (zh) | 一种表面附着胶囊沙袋的拟人机器人手装置 | |
| CN111319060A (zh) | 一种软体机器人抓持装置及抓持方法 | |
| CN105856185A (zh) | 活塞驱动磁流柔性机器人手装置 | |
| CN210100036U (zh) | 一种具有缓冲结构的内撑式夹具 | |
| CN110497395B (zh) | 一种双向运动气动柔性驱动器及其工作方法 | |
| JP2014532844A (ja) | 真空動力式工具の非線形圧縮/拡張を有するベローズのための挿入体 | |
| CN105643649A (zh) | 六关节三指苹果抓取机械手 | |
| KR20200009872A (ko) | 형상적응형 전기접착 그리퍼 | |
| CN105583821A (zh) | 流体驱动多维自适应机器人手装置 | |
| CN112757329A (zh) | 一种基于折纸原理的气动软体抓取器 | |
| JP2009039820A (ja) | 把持装置およびその制御方法 | |
| CN108858265A (zh) | 基于人工肌肉的柔性抓手 | |
| CN205799474U (zh) | 活塞驱动磁流柔性机器人手装置 | |
| CN101104273A (zh) | 一种气动驱动器 | |
| CN115503003A (zh) | 一种柔性抓取结构 | |
| CN204800657U (zh) | 一种机器人仿生手指 | |
| CN209593953U (zh) | 抓取机构以及离型纸撕离装置 | |
| CN202394732U (zh) | 一种具有离合机构的电动驱动装置 | |
| CN218984825U (zh) | 一种柔性抓取结构 | |
| CN113967922A (zh) | 一种全柔性气动式软体仿生机械手 | |
| CN201283325Y (zh) | 一种空气吹尘枪 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220520 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230427 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230515 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230803 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230919 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240119 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7425864 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |