JP7480748B2 - ライドシェア車両の制御装置及び制御方法 - Google Patents
ライドシェア車両の制御装置及び制御方法 Download PDFInfo
- Publication number
- JP7480748B2 JP7480748B2 JP2021083997A JP2021083997A JP7480748B2 JP 7480748 B2 JP7480748 B2 JP 7480748B2 JP 2021083997 A JP2021083997 A JP 2021083997A JP 2021083997 A JP2021083997 A JP 2021083997A JP 7480748 B2 JP7480748 B2 JP 7480748B2
- Authority
- JP
- Japan
- Prior art keywords
- zone
- data
- ride
- vehicle
- drop
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/3438—Rendezvous; Ride sharing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0098—Details of control systems ensuring comfort, safety or stability not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0025—Planning or execution of driving tasks specially adapted for specific operations
- B60W60/00253—Taxi operations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18054—Propelling the vehicle related to particular drive situations at stand still, e.g. engine in idling state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/02—Reservations, e.g. for tickets, services or events
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/04—Forecasting or optimisation specially adapted for administrative or management purposes, e.g. linear programming or "cutting stock problem"
- G06Q10/047—Optimisation of routes or paths, e.g. travelling salesman problem
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/40—Business processes related to the transportation industry
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0002—Automatic control, details of type of controller or control system architecture
- B60W2050/0004—In digital systems, e.g. discrete-time systems involving sampling
- B60W2050/0005—Processor details or data handling, e.g. memory registers or chip architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/01—Occupants other than the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/043—Identity of occupants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4029—Pedestrians
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Automation & Control Theory (AREA)
- Human Resources & Organizations (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Economics (AREA)
- Strategic Management (AREA)
- Tourism & Hospitality (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Marketing (AREA)
- General Business, Economics & Management (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Operations Research (AREA)
- Entrepreneurship & Innovation (AREA)
- Development Economics (AREA)
- Quality & Reliability (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Game Theory and Decision Science (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Primary Health Care (AREA)
- Traffic Control Systems (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
前記制御装置は、メモリと、プロセッサとを備える。前記メモリには、前記ライドシェア車両から降りる第1ユーザに関するドロップオフデータと、前記ライドシェア車両に乗る第2ユーザに関するピックアップデータと、が格納される。前記プロセッサは、前記ドロップオフデータ及び前記ピックアップデータの少なくとも一方に基づいて、前記第1ユーザのドロップオフ及び前記第2ユーザのピックアップの少なくとも一方を含む車両制御を実行する。
前記ドロップオフデータは、前記ドロップオフを行う予定位置のデータを含む。
前記ピックアップデータは、前記ピックアップを行う予定位置のデータを含む。
前記プロセッサは、前記車両制御において、
前記ドロップオフ及びピックアップを行う予定位置の少なくとも一方に基づいて、前記ドロップオフを実行する第1ゾーン及び前記ピックアップを実行する第2ゾーンの少なくとも一方を、前記ライドシェア車両の前方の道路上に設定し、
前記第1及び第2ゾーンの両方が設定された場合、これらのゾーンが重なるか否かを判定し、
前記第1及び第2ゾーンが重ならないと判定された場合、
前記第1ゾーン内に前記ライドシェア車両の第1目標停止位置を設定し、
前記第2ゾーン内に前記ライドシェア車両の第2目標停止位置を設定し、
前記第1及び第2ゾーンが重なると判定された場合、
前記第2ゾーン内に前記第2目標停止位置を設定し、
前記第2ゾーンと重ならないスペースに前記第1ゾーンを再設定し、
前記再設定された第1ゾーン内に前記第1目標停止位置を設定する。
前記プロセッサは、前記ライドシェア車両の現在位置から前記ピックアップの予定位置までの距離が閾値よりも短い場合に前記第2ゾーンを設定する処理を行う。
前記プロセッサは、前記第2ゾーンの設定処理において、
前記距離が前記閾値よりも短い前記ピックアップの予定位置が複数存在する場合、前記第2ゾーンの候補を予定位置ごとに設定し、
前記第2ゾーンの候補が、前記距離が最も短い最寄り候補と、前記最寄り候補と重なる他の候補と、を含むか否かを判定し、
前記第2ゾーンの候補が前記最寄り候補のみを含むと判定された場合、前記最寄り候補を前記第2ゾーンに設定し、
前記第2ゾーンの候補が前記最寄り候補及び前記他の候補を含むと判定された場合、これらの候補を結合して前記第2ゾーンを設定する。
前記ドロップオフデータは、前記第1ユーザの属性のデータを含む。
前記プロセッサは、前記ライドシェア車両の現在位置から前記ドロップオフの予定位置までの距離が閾値よりも短い場合に前記第1ゾーンを設定する処理を行う。
前記プロセッサは、前記第1ゾーンの設定処理において、
前記距離が前記閾値よりも短い前記ドロップオフの予定位置が複数存在する場合、前記第1ゾーンの候補を予定位置ごとに設定し、
前記第1ゾーンの候補が、前記距離が最も短い最寄り候補と、前記最寄り候補と重なる他の候補と、を含むか否かを判定し、
前記第1ゾーンの候補が前記最寄り候補のみを含むと判定された場合、前記最寄り候補を前記第1ゾーンに設定し、
前記第1ゾーンの候補が前記最寄り候補及び他の候補を含むと判定された場合、これらの候補の設定に用いられた前記ドロップオフの予定位置のデータと同じドロップオフデータに含まれる前記属性のデータに基づいて、前記第1ゾーンを設定する。
前記ライドシェア車両は、歩行弱者のドロップオフを補助するスロープ板を備える。
前記属性は、歩行弱者の区分を含む。
前記プロセッサは、前記第1ゾーンの設定処理において、
前記第1ゾーンの候補が前記最寄り候補及び他の候補を含むと判定された場合、これらの候補の設定に用いられた前記ドロップオフの予定位置のデータと同じドロップオフデータに含まれる前記属性のデータが、歩行弱者のデータを含むか否かを判定し、
前記属性のデータが前記歩行弱者のデータを含むと判定された場合、前記スロープ板の展開が可能なスペースに前記第1ゾーンを設定する。
前記属性は、準歩行弱者の区分を更に含む。
前記プロセッサは、前記第1ゾーンの設定処理において、
前記属性のデータが前記歩行弱者のデータを含まないと判定された場合、前記属性のデータが、準歩行弱者のデータを含むか否かを判定し、
前記属性のデータが前記準歩行弱者のデータを含むと判定された場合、少なくとも平坦なスペースに前記第1ゾーンを設定する。
前記プロセッサは、前記第1ゾーンの再設定処理において、
前記第1ゾーンの設定処理において前記最寄り候補又は他の候補の設定に用いられた前記ドロップオフの予定位置のデータと同じドロップオフデータに含まれる前記属性のデータに基づいて、前記第1ゾーンを再設定する。
前記メモリには、前記ライドシェア車両の運転環境データが更に格納される。
前記属性は、歩行弱者及び準歩行弱者の区分を含む。
前記プロセッサは、前記第1ゾーンの再設定処理において、
前記第1ゾーンの設定処理において前記最寄り候補又は他の候補の設定に用いられた前記ドロップオフの予定位置のデータと同じドロップオフデータに含まれる前記属性のデータが、歩行弱者又は準歩行弱者のデータを含むか否かを判定し、
前記属性のデータが前記歩行弱者又は準歩行弱者のデータを含まないと判定された場合、前記運転環境データに基づいて前記第1ゾーンを設定する。
前記制御装置は、メモリと、プロセッサとを備える。前記メモリには、前記ライドシェア車両から降りる第1ユーザに関するドロップオフデータと、前記ライドシェア車両に乗る第2ユーザに関するピックアップデータと、が格納される。前記プロセッサは、前記ドロップオフデータ及び前記ピックアップデータの少なくとも一方に基づいて、前記第1ユーザのドロップオフ及び前記第2ユーザのピックアップの少なくとも一方を含む車両制御を実行する。
前記ドロップオフデータは、前記ドロップオフを行う予定位置のデータを含む。
前記ピックアップデータは、前記ピックアップを行う予定位置のデータを含む。
前記車両制御は、
前記ドロップオフ及びピックアップを行う予定位置の少なくとも一方に基づいて、前記ドロップオフを実行する第1ゾーン及び前記ピックアップを実行する第2ゾーンの少なくとも一方を、前記ライドシェア車両の前方の道路上に設定する処理と、
前記第1及び第2ゾーンの両方が設定された場合、これらのゾーンが重なるか否かを判定する処理と、
前記第1及び第2ゾーンが重ならないと判定された場合、前記第1ゾーン内に前記ライドシェア車両の第1目標停止位置を設定し、前記第2ゾーン内に前記ライドシェア車両の第2目標停止位置を設定する処理と、
前記第1及び第2ゾーンが重なると判定された場合、前記第2ゾーン内に前記第2目標停止位置を設定し、前記第2ゾーンと重ならないスペースに前記第1ゾーンを再設定し、前記再設定された第1ゾーン内に前記第1目標停止位置を設定する処理と、
を含む。
可能となる。
1-1.ライドシェアサービス
ライドシェアサービスは、1台のライドシェア車両の走行中に不特定多数のユーザ(歩行者)のピックアップ及びドロップオフを行いながら、これらのユーザを輸送するサービスである。図1~3は、ライドシェアサービスの概要を説明する図である。図1~3には、道路RD上を走行するライドシェア車両VH(以下、単に「車両VH」とも称す。)が描かれている。車両VHは、例えば、ドライバレス運転が可能な自動運転車両である。車両VHにドライバが乗っていてもよい。
ライドシェアサービスでは、不特定多数のユーザが1台の車両VHを同時に利用する。そのため、ランドマークLM1の位置とランドマークLM2の位置が一致し、又は、これらの位置の間の距離が短くなる。そうすると、ゾーンZ1とゾーンZ2の一部又は全部が重なることから次の問題が発生する。
図5及び6は、実施形態に係る車両制御の特徴を説明する図である。図5及び6に示されるゾーンZ1は、再設定されたゾーンZ1に相当する。これらのゾーンZ1は、例えば、ランドマークLM1の近く、かつ、ゾーンZ2と重ならないスペースに設定される。図5に示される例では、ゾーンZ2の手前のスペースにゾーンZ1が設定される。図6に示される例では、ゾーンZ2の奥のスペースにゾーンZ1が設定される。
2-1.ライドシェア車両の全体構成例
図7は、車両VHの構成例を示すブロック図である。図7に示されるように、車両VHは、ドア11と、スロープ板12と、GNSS(Global Navigation Satellite System)装置13と、センサ群14と、通信装置15と、地図データベース(地図DB)16と、走行装置17と、ディスプレイ18と、制御装置19と、を備えている。ドア11等の要素と、制御装置19とは、例えば、車載のネットワーク(例えば、CAN(Controller Area Network))により接続されている。
ここで、図8を参照して、車両VHの車両制御に関連するデータの構成例について説明する。図8は、メモリ19bに格納されるデータの一例を示すブロック図である。図8に示されるように、メモリ19bには、ドロップオフデータDRPと、ピックアップデータPICと、運転環境データENVとが格納されている。
図9は、制御装置19(プロセッサ19a)により実行される車両制御の流れを示すフローチャートである。尚、図9に示されるルーチンは、所定の制御周期で繰り返し実行される。
図10は、図9のステップS3で行われるゾーンZ2(第2ゾーン)の設定処理の流れを示すフローチャートである。
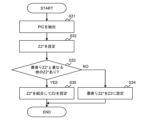
図12は、図9のステップS5で行われるゾーンZ1(第1ゾーン)の設定処理の流れを示すフローチャートである。
図13は、図9のステップS7で行われる目標停止位置TPの設定処理の流れを示すフローチャートである。
(1)再設定後のゾーンZ1は、ゾーンZ2と重ならない
(2)再設定後のゾーンZ1は、ランドマークLM1の近くのスペースに位置する
(3)再設定後のゾーンZ1は、設定前のユーザU1の属性条件と同じ属性条件を満たす
実施形態によれば、ゾーンZ1及びZ2の両方が設定された場合、これらのゾーンが重なるか否かが判定される。そして、これらのゾーンが重なると判定された場合、ゾーンZ2と重ならないスペースにゾーンZ1が再設定される。ゾーンZ2と重ならないスペースにゾーンZ1が設定されれば、ゾーンZ2とゾーンZ1が位置的に分離され、降車動作と乗車動作が時間的に分離される。従って、ユーザU1及びU2の安全性を確保することが可能となる。また、ライドシェアサービスの利便性が低下するのを抑えることも可能となる。
19a プロセッサ
19b メモリ
U1,U2 ユーザ
U11,U21 歩行弱者
U12,U22 準歩行弱者
U13,U23 通常歩行者
Z1,Z2 ゾーン
Z1* ゾーンZ1の候補
Z2* ゾーンZ2の候補
LM1,LM2 ランドマーク
TT,TT1、TT2 目標軌道
VH ライドシェア車両
PIC ピックアップデータ
DRP ドロップオフデータ
ENV 運転環境データ
IND_U1,IND_U2 属性
LOC_U1,LOC_U2 予定位置
Claims (8)
- ライドシェア車両の制御装置であって、
前記ライドシェア車両から降りる第1ユーザに関するドロップオフデータと、前記ライドシェア車両に乗る第2ユーザに関するピックアップデータと、が格納されたメモリと、
前記ドロップオフデータ及び前記ピックアップデータの少なくとも一方に基づいて、前記第1ユーザのドロップオフ及び前記第2ユーザのピックアップの少なくとも一方を含む車両制御を実行するプロセッサと、
を備え、
前記ドロップオフデータは、前記ドロップオフを行う予定位置のデータを含み、
前記ピックアップデータは、前記ピックアップを行う予定位置のデータを含み、
前記プロセッサは、前記車両制御において、
前記ドロップオフ及びピックアップを行う予定位置の少なくとも一方に基づいて、前記ドロップオフを実行する第1ゾーン及び前記ピックアップを実行する第2ゾーンの少なくとも一方を、前記ライドシェア車両の前方の道路上に設定し、
前記第1及び第2ゾーンの両方が設定された場合、これらのゾーンが重なるか否かを判定し、
前記第1及び第2ゾーンが重ならないと判定された場合、
前記第1ゾーン内に前記ライドシェア車両の第1目標停止位置を設定し、
前記第2ゾーン内に前記ライドシェア車両の第2目標停止位置を設定し、
前記第1及び第2ゾーンが重なると判定された場合、
前記第2ゾーン内に前記第2目標停止位置を設定し、
前記第2ゾーンと重ならないスペースに前記第1ゾーンを再設定し、
前記再設定された第1ゾーン内に前記第1目標停止位置を設定する
ことを特徴とするライドシェア車両の制御装置。 - 請求項1に記載の制御装置であって、
前記プロセッサは、前記ライドシェア車両の現在位置から前記ピックアップの予定位置までの距離が閾値よりも短い場合に前記第2ゾーンを設定する処理を行い、
前記プロセッサは、前記第2ゾーンの設定処理において、
前記距離が前記閾値よりも短い前記ピックアップの予定位置が複数存在する場合、前記第2ゾーンの候補を予定位置ごとに設定し、
前記第2ゾーンの候補が、前記距離が最も短い最寄り候補と、前記最寄り候補と重なる他の候補と、を含むか否かを判定し、
前記第2ゾーンの候補が前記最寄り候補のみを含むと判定された場合、前記最寄り候補を前記第2ゾーンに設定し、
前記第2ゾーンの候補が前記最寄り候補及び前記他の候補を含むと判定された場合、これらの候補を結合して前記第2ゾーンを設定する
ことを特徴とするライドシェア車両の制御装置。 - 請求項1又は2に記載の制御装置であって、
前記ドロップオフデータは、前記第1ユーザの属性のデータを含み、
前記プロセッサは、前記ライドシェア車両の現在位置から前記ドロップオフの予定位置までの距離が閾値よりも短い場合に前記第1ゾーンを設定する処理を行い、
前記プロセッサは、前記第1ゾーンの設定処理において、
前記距離が前記閾値よりも短い前記ドロップオフの予定位置が複数存在する場合、前記第1ゾーンの候補を予定位置ごとに設定し、
前記第1ゾーンの候補が、前記距離が最も短い最寄り候補と、前記最寄り候補と重なる他の候補と、を含むか否かを判定し、
前記第1ゾーンの候補が前記最寄り候補のみを含むと判定された場合、前記最寄り候補を前記第1ゾーンに設定し、
前記第1ゾーンの候補が前記最寄り候補及び他の候補を含むと判定された場合、これらの候補の設定に用いられた前記ドロップオフの予定位置のデータと同じドロップオフデータに含まれる前記属性のデータに基づいて、前記第1ゾーンを設定する
ことを特徴とするライドシェア車両の制御装置。 - 請求項3に記載の制御装置であって、
前記ライドシェア車両は、歩行弱者のドロップオフを補助するスロープ板を備え、
前記属性は、歩行弱者の区分を含み、
前記プロセッサは、前記第1ゾーンの設定処理において、
前記第1ゾーンの候補が前記最寄り候補及び他の候補を含むと判定された場合、これらの候補の設定に用いられた前記ドロップオフの予定位置のデータと同じドロップオフデータに含まれる前記属性のデータが、歩行弱者のデータを含むか否かを判定し、
前記属性のデータが前記歩行弱者のデータを含むと判定された場合、前記スロープ板の展開が可能なスペースに前記第1ゾーンを設定する
ことを特徴とするライドシェア車両の制御装置。 - 請求項4に記載の制御装置であって、
前記属性は、準歩行弱者の区分を更に含み、
前記プロセッサは、前記第1ゾーンの設定処理において、
前記属性のデータが前記歩行弱者のデータを含まないと判定された場合、前記属性のデータが、準歩行弱者のデータを含むか否かを判定し、
前記属性のデータが前記準歩行弱者のデータを含むと判定された場合、少なくとも平坦なスペースに前記第1ゾーンを設定する
ことを特徴とするライドシェア車両の制御装置。 - 請求項3~5の何れか1項に記載の制御装置であって、
前記プロセッサは、前記第1ゾーンの再設定処理において、
前記第1ゾーンの設定処理において前記最寄り候補又は他の候補の設定に用いられた前記ドロップオフの予定位置のデータと同じドロップオフデータに含まれる前記属性のデータに基づいて、前記第1ゾーンを再設定する
ことを特徴とするライドシェア車両の制御装置。 - 請求項6に記載の制御装置であって、
前記メモリには、前記ライドシェア車両の運転環境データが更に格納され、
前記属性は、歩行弱者及び準歩行弱者の区分を含み、
前記プロセッサは、前記第1ゾーンの再設定処理において、
前記第1ゾーンの設定処理において前記最寄り候補又は他の候補の設定に用いられた前記ドロップオフの予定位置のデータと同じドロップオフデータに含まれる前記属性のデータが、歩行弱者又は準歩行弱者のデータを含むか否かを判定し、
前記属性のデータが前記歩行弱者又は準歩行弱者のデータを含まないと判定された場合、前記運転環境データに基づいて前記第1ゾーンを設定する
ことを特徴とするライドシェア車両の制御装置。 - ライドシェア車両の制御装置による制御方法であって、
前記制御装置は、
前記ライドシェア車両から降りる第1ユーザに関するドロップオフデータと、前記ライドシェア車両に乗る第2ユーザに関するピックアップデータと、が格納されたメモリと、
前記ドロップオフデータ及び前記ピックアップデータの少なくとも一方に基づいて、前記第1ユーザのドロップオフ及び前記第2ユーザのピックアップの少なくとも一方を含む車両制御を実行するプロセッサと、
を備え、
前記ドロップオフデータは、前記ドロップオフを行う予定位置のデータを含み、
前記ピックアップデータは、前記ピックアップを行う予定位置のデータを含み、
前記車両制御が、
前記ドロップオフ及びピックアップを行う予定位置の少なくとも一方に基づいて、前記ドロップオフを実行する第1ゾーン及び前記ピックアップを実行する第2ゾーンの少なくとも一方を、前記ライドシェア車両の前方の道路上に設定する処理と、
前記第1及び第2ゾーンの両方が設定された場合、これらのゾーンが重なるか否かを判定する処理と、
前記第1及び第2ゾーンが重ならないと判定された場合、前記第1ゾーン内に前記ライドシェア車両の第1目標停止位置を設定し、前記第2ゾーン内に前記ライドシェア車両の第2目標停止位置を設定する処理と、
前記第1及び第2ゾーンが重なると判定された場合、前記第2ゾーン内に前記第2目標停止位置を設定し、前記第2ゾーンと重ならないスペースに前記第1ゾーンを再設定し、前記再設定された第1ゾーン内に前記第1目標停止位置を設定する処理と、
を含むことを特徴とするライドシェア車両の制御方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021083997A JP7480748B2 (ja) | 2021-05-18 | 2021-05-18 | ライドシェア車両の制御装置及び制御方法 |
| EP22172033.7A EP4092589B1 (en) | 2021-05-18 | 2022-05-06 | Controller and control method for ride-sharing vehicle |
| CN202210498255.XA CN115366912B (zh) | 2021-05-18 | 2022-05-09 | 拼车车辆的控制装置和控制方法 |
| US17/744,119 US11959756B2 (en) | 2021-05-18 | 2022-05-13 | Controller and vehicle control method for setting pick-up and drop-off zones of ride-sharing vehicle |
| KR1020220058750A KR102749323B1 (ko) | 2021-05-18 | 2022-05-13 | 라이드 셰어 차량의 제어 장치 및 제어 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021083997A JP7480748B2 (ja) | 2021-05-18 | 2021-05-18 | ライドシェア車両の制御装置及び制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022177610A JP2022177610A (ja) | 2022-12-01 |
| JP7480748B2 true JP7480748B2 (ja) | 2024-05-10 |
Family
ID=82058250
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021083997A Active JP7480748B2 (ja) | 2021-05-18 | 2021-05-18 | ライドシェア車両の制御装置及び制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11959756B2 (ja) |
| EP (1) | EP4092589B1 (ja) |
| JP (1) | JP7480748B2 (ja) |
| KR (1) | KR102749323B1 (ja) |
| CN (1) | CN115366912B (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004062490A (ja) | 2002-07-29 | 2004-02-26 | Matsushita Electric Ind Co Ltd | 相乗り代理交渉システムおよび相乗り代理交渉方法 |
| JP2019525299A (ja) | 2016-06-21 | 2019-09-05 | ヴィア トランスポーテーション、インコーポレイテッド | 車両相乗り管理のためのシステム及び方法 |
| JP2020086930A (ja) | 2018-11-26 | 2020-06-04 | トヨタ自動車株式会社 | 運行支援装置、車載装置、運行支援システム、運行支援方法及び運行支援プログラム |
| JP2020111223A (ja) | 2019-01-15 | 2020-07-27 | トヨタ自動車株式会社 | 車両制御装置及び車両制御方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103546515A (zh) * | 2012-07-16 | 2014-01-29 | 上海博讯信息技术有限公司 | 一种实时拼车系统 |
| JP6221805B2 (ja) * | 2014-02-14 | 2017-11-01 | アイシン・エィ・ダブリュ株式会社 | 運転支援装置、運転支援方法及びプログラム |
| US20210223051A1 (en) * | 2017-01-25 | 2021-07-22 | Via Transportation, Inc. | Systems and methods for vehicle ridesharing |
| JPWO2018230698A1 (ja) * | 2017-06-16 | 2020-02-27 | 本田技研工業株式会社 | イベント配車装置、イベント配車方法、プログラム、および管理システム |
| CN107248273B (zh) * | 2017-07-03 | 2020-09-29 | 鄂尔多斯市普渡科技有限公司 | 一种针对坐轮椅乘客的应对方法 |
| US20190066515A1 (en) | 2017-08-22 | 2019-02-28 | Waymo Llc | Estimating time to pick up and drop off passengers for improved stopping analysis in autonomous vehicles |
| CN112334961B (zh) * | 2018-06-26 | 2022-10-14 | 日产自动车株式会社 | 上下车地点决定方法和上下车地点决定装置 |
| JP7110775B2 (ja) * | 2018-07-11 | 2022-08-02 | トヨタ自動車株式会社 | 情報処理装置、乗車車両調整方法及び乗車車両調整プログラム |
| DE102018216222B4 (de) * | 2018-09-24 | 2024-03-21 | Audi Ag | Verfahren und System zum Verifizieren einer Durchführung einer Gemeinschaftsfahrt einer Fahrgemeinschaft |
| US20200104770A1 (en) * | 2018-09-28 | 2020-04-02 | Ford Global Technologies, Llc | Rideshare with special need accommodations |
| JP7028158B2 (ja) * | 2018-12-28 | 2022-03-02 | トヨタ自動車株式会社 | 情報処理装置および移動体システム |
| US11829904B2 (en) * | 2019-09-27 | 2023-11-28 | Uber Technologies, Inc. | On-demand transport selection process based on pick-up/drop-off zone utilization |
| US12038749B2 (en) * | 2021-01-12 | 2024-07-16 | Qualcomm Incorporated | Determining drop-off or pick-up locations for passengers of vehicles |
-
2021
- 2021-05-18 JP JP2021083997A patent/JP7480748B2/ja active Active
-
2022
- 2022-05-06 EP EP22172033.7A patent/EP4092589B1/en active Active
- 2022-05-09 CN CN202210498255.XA patent/CN115366912B/zh active Active
- 2022-05-13 KR KR1020220058750A patent/KR102749323B1/ko active Active
- 2022-05-13 US US17/744,119 patent/US11959756B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004062490A (ja) | 2002-07-29 | 2004-02-26 | Matsushita Electric Ind Co Ltd | 相乗り代理交渉システムおよび相乗り代理交渉方法 |
| JP2019525299A (ja) | 2016-06-21 | 2019-09-05 | ヴィア トランスポーテーション、インコーポレイテッド | 車両相乗り管理のためのシステム及び方法 |
| JP2020086930A (ja) | 2018-11-26 | 2020-06-04 | トヨタ自動車株式会社 | 運行支援装置、車載装置、運行支援システム、運行支援方法及び運行支援プログラム |
| JP2020111223A (ja) | 2019-01-15 | 2020-07-27 | トヨタ自動車株式会社 | 車両制御装置及び車両制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4092589A1 (en) | 2022-11-23 |
| KR20220156446A (ko) | 2022-11-25 |
| CN115366912B (zh) | 2025-04-04 |
| JP2022177610A (ja) | 2022-12-01 |
| US20220373340A1 (en) | 2022-11-24 |
| EP4092589B1 (en) | 2026-05-06 |
| CN115366912A (zh) | 2022-11-22 |
| US11959756B2 (en) | 2024-04-16 |
| KR102749323B1 (ko) | 2025-01-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111391826B (zh) | 车辆控制系统、车辆控制方法及存储介质 | |
| CN111833645A (zh) | 停车场管理装置、停车场管理方法、及存储介质 | |
| CN110001634A (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| CN111661037B (zh) | 车辆控制装置、车辆控制方法及计算机可读取存储介质 | |
| US11027651B2 (en) | Vehicle control device, vehicle control system, vehicle control method, and storage medium | |
| CN111791882B (zh) | 管理装置 | |
| CN111376853B (zh) | 车辆控制系统、车辆控制方法及存储介质 | |
| JP2020166633A (ja) | 管理装置、管理方法、およびプログラム | |
| JP7236307B2 (ja) | 車両制御装置、車両制御方法、及びプログラム | |
| CN110281935A (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| CN111273651A (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| JP7523385B2 (ja) | 移動体制御システム、移動体、制御方法、およびプログラム | |
| JP7237684B2 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| CN111766868A (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| CN111932927B (zh) | 管理装置、管理方法及存储介质 | |
| JP2022099048A (ja) | 自動運転装置及び自動運転方法 | |
| US12164300B2 (en) | Moving object control system, moving object, control method, and storage medium | |
| JP7480748B2 (ja) | ライドシェア車両の制御装置及び制御方法 | |
| CN111796591A (zh) | 车辆控制装置、监视系统、车辆控制方法及存储介质 | |
| CN111661038A (zh) | 车辆控制系统、车辆控制方法及存储介质 | |
| JP2020166765A (ja) | 管理装置、管理方法、およびプログラム | |
| JP2020186563A (ja) | 制御装置、駐車場システム、制御方法、及びプログラム | |
| JP2021177292A (ja) | 自動運転システムおよび自動運転方法 | |
| JP7439781B2 (ja) | 自動運転車両、乗合車両及び車両乗換システム | |
| JP2021177293A (ja) | 自動運転システムおよび自動運転方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231026 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240321 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240326 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240408 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7480748 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |