JP7499680B2 - 飛行体制御システム - Google Patents
飛行体制御システム Download PDFInfo
- Publication number
- JP7499680B2 JP7499680B2 JP2020186727A JP2020186727A JP7499680B2 JP 7499680 B2 JP7499680 B2 JP 7499680B2 JP 2020186727 A JP2020186727 A JP 2020186727A JP 2020186727 A JP2020186727 A JP 2020186727A JP 7499680 B2 JP7499680 B2 JP 7499680B2
- Authority
- JP
- Japan
- Prior art keywords
- area
- aircraft
- flight route
- avoidance
- route
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Landscapes
- Emergency Alarm Devices (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
監視エリア内の設備の周囲に規定された進入禁止エリアの外側に設定される飛行ルートに沿って飛行体を飛行させ、前記設備を点検するための飛行体制御システムであって、
前記飛行体の飛行を管理する飛行管理部と、
前記飛行体に設けられ、爆発性ガスを検知する飛行体側ガス検知部及び、前記監視エリア内に設けられ、爆発性ガスを検知するエリア側ガス検知部のうちの少なくともいずれか一方と、
前記飛行体側ガス検知部及び前記エリア側ガス検知部のうちの少なくともいずれか一方での検知結果を基に、爆発性雰囲気が存在するか、または爆発性雰囲気が存在する虞のある危険エリアを設定する危険エリア設定部と、
前記飛行体側ガス検知部及び前記エリア側ガス検知部のうちの少なくともいずれか一方で検知した前記爆発性ガスの空気に対する比重が1よりも大きいか否かを判断する比重判断部と、
前記危険エリアを避ける前記飛行ルートとしての回避飛行ルートを生成するか否かを判断するルート生成要否判断部と、
前記ルート生成要否判断部において、前記回避飛行ルートを生成すると判断した場合に、ルート生成情報を基にして前記回避飛行ルートを生成するルート生成部と、を備えており、
前記ルート生成情報は、前記比重判断部での判断結果及び前記危険エリア設定部で設定された前記危険エリアを含み、
前記ルート生成部は、
前記比重判断部において前記比重が1よりも大きいと判断された場合に、飛行中の飛行ルートよりも前記飛行体の高度が高くなる高高度回避飛行ルートを前記回避飛行ルートとして生成し、
前記比重判断部において前記比重が1よりも大きくないと判断された場合に、飛行中の飛行ルートよりも前記飛行体の高度が低くなる低高度回避飛行ルートを前記回避飛行ルートとして生成する点にある。
前記ルート生成部は、
前記高高度回避飛行ルートとして、高度を高くした元来た飛行ルートに沿って現在地から発着場へ向かう第1高高度帰還飛行ルート、及び前記第1高高度帰還飛行ルートとは異なる経路で現在地から発着場へ向かう第2高高度帰還飛行ルートのうちのいずれか一方を生成し、
前記低高度回避飛行ルートとして、高度を低くした元来た飛行ルートに沿って現在地から発着場へ向かう第1低高度帰還飛行ルート、及び前記第1低高度帰還飛行ルートとは異なる経路で現在地から発着場へ向かう第2低高度帰還飛行ルートのうちのいずれか一方を生成する点にある。
前記飛行体が前記危険エリア又は前記進入禁止エリアに落下する、或いは落下する虞がある回避エリアを設定する回避エリア設定部を備えており、
前記回避エリア設定部で設定された前記回避エリアが前記ルート生成情報の一つである点にある。
前記飛行体の位置を検出する飛行体位置検出部と、
前記監視エリア内の風向及び風速を検出する風向風速検出部と、
前記飛行体の加速度を導出する飛行体加速度導出部と、を備えており、
前記回避エリア設定部は、前記飛行体位置検出部での検出結果、前記飛行体加速度導出部での導出結果、前記風向風速検出部での検出結果、前記飛行体の重量及び前記飛行体の受風面積を基に、前記回避エリアを設定する点にある。
前記飛行体の落下予測エリアを算出する落下予測エリア算出部と、
前記落下予測エリア算出部で算出された前記落下予測エリアが、前記危険エリア設定部によって設定された前記危険エリア内又は前記進入禁止エリア内であるか否かを判断する落下エリア判断部と、を備えており、
前記飛行管理部は、
前記落下エリア判断部において、前記落下予測エリアが前記危険エリア内又は前記進入禁止エリア内であると判断した場合に、前記危険エリア又は前記進入禁止エリアへの前記飛行体の接近を回避する接近回避対応をとる点にある。
前記接近回避対応は、前記危険エリア又は前記進入禁止エリアに前記飛行体が近づかないように、前記ルート生成部で生成された前記回避飛行ルートを修正しつつ、当該回避飛行ルートに沿って前記飛行体を自動操縦により飛行させる対応である点にある。
前記飛行体の遠隔操縦に関する指令を送受信可能に構成された操縦機器を備え、
前記接近回避対応は、前記危険エリア又は前記進入禁止エリアに前記飛行体が近づかないように操縦者による前記飛行体の遠隔操縦に制限を加える対応である点にある。
前記飛行体の位置を検出する飛行体位置検出部と、
前記監視エリア内の風向及び風速を検出する風向風速検出部と、
前記飛行体の加速度を導出する飛行体加速度導出部と、を備えており、
前記落下予測エリア算出部は、前記飛行体位置検出部での検出結果、前記飛行体加速度導出部での導出結果、前記風向風速検出部での検出結果、前記飛行体の重量及び前記飛行体の受風面積を基に、前記落下予測エリアを算出する点にある。
前記飛行管理部は、前記ルート生成部で生成された前記回避飛行ルートに沿って前記飛行体を自動操縦により飛行させる点にある。
前記飛行体の遠隔操縦に関する指令を送受信可能に構成された操縦機器を備え、
前記飛行管理部は、前記ルート生成部で生成された前記回避飛行ルートを前記操縦機器を通じて操縦者に提示する点にある。
前記監視エリア内の風向及び風速を検出する風向風速検出部を備えており、
前記危険エリア設定部は、前記飛行体側ガス検知部及び前記エリア側ガス検知部のうちの少なくともいずれか一方での検知結果並びに前記風向風速検出部での検出結果を基に前記危険エリアを設定する点にある。
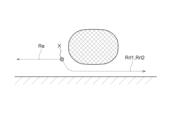
本実施形態に係る飛行体制御システムは、図1に示すように、監視エリアA内の設備Bの周囲に規定された進入禁止エリアCの外側に設定される飛行ルートに沿って飛行体10を飛行させ、設備Bを点検するためのシステムであって、監視エリアA内で爆発性ガスの漏洩が起こった場合には、この爆発性雰囲気が存在する或いは爆発性雰囲気が存在する虞がある危険エリアDを回避する回避飛行ルートRaを生成し、既存飛行ルートReに代えて、生成した回避飛行ルートRaに沿って飛行体10を飛行させるシステムである。
図1及び図2に示すように、本実施形態における飛行体制御システムは、監視エリアA内を飛行する飛行体10と、外部から飛行体10を制御する管理サーバ20と、飛行体10の遠隔操縦が可能な操縦機器40とを備えており、飛行体10と管理サーバ20と操縦機器40との間では各種情報や操作指令に係る信号を送受信できるようになっている。
(式1)
F=ρC(v-u)2×A/2
(式2)
a=F/m
(式3)
L=(at2)/2
次に、以上の構成を備えた飛行体制御システムの処理フローについて、図10及び図11を参照しつつ説明する。尚、以下においては、主として飛行管理部32による自動操縦によって飛行体10を飛行させて設備Bの点検を行う場合を例にとって説明する。
〔1〕上記実施形態では、飛行体10を自動操縦により飛行させる場合と、回避飛行ルートRaや既存飛行ルートReを操縦者Hに提示する場合とを飛行管理部32が適宜変更する態様としたが、これに限られるものではない。例えば、常に飛行体10を自動操縦により飛行させるようにしてもよいし、常に所定の飛行ルートを操縦者Hに提示するようにしてもよい。
また、上記実施形態では、危険エリアDを設定する際に、比重判断部30の判断結果を考慮していないが、当該判断結果を考慮して危険エリアDを設定するようにしてもよい。この場合、例えば、爆発性ガスの空気に対する比重が1よりも大きいという判断結果が得られていれば、地表に近い部分に沿って広がるような危険エリアDが設定される。
11:飛行体側ガスセンサ(飛行体側ガス検知部)
12:衛星測位用受信機(飛行体位置検出部)
13:加速度センサ(飛行体加速度導出部)
16a,16b,16c:エリア側ガスセンサ(エリア側ガス検知部)
17a,17b,17c:風向風速計(風向風速検出部)
23:危険エリア設定部
24:ルート生成要否判断部
25:落下予測エリア算出部
26:回避エリア設定部
27:落下エリア判断部
30:比重判断部
31:ルート生成部
32:飛行管理部
40:操縦機器
A:監視エリア
B:設備
C:進入禁止エリア
D:危険エリア
E:落下予測エリア
F:回避エリア
P:発着場
H:操縦者
Re:既存飛行ルート
Ra:回避飛行ルート
Rah:高高度回避飛行ルート
Ral:低高度回避飛行ルート
Rrh1:第1高高度帰還飛行ルート
Rrh2:第2高高度帰還飛行ルート
Rrl1:第1低高度帰還飛行ルート
Rrl2:第2低高度帰還飛行ルート
Claims (11)
- 監視エリア内の設備の周囲に規定された進入禁止エリアの外側に設定される飛行ルートに沿って飛行体を飛行させ、前記設備を点検するための飛行体制御システムであって、
前記飛行体の飛行を管理する飛行管理部と、
前記飛行体に設けられ、爆発性ガスを検知する飛行体側ガス検知部及び、前記監視エリア内に設けられ、爆発性ガスを検知するエリア側ガス検知部のうちの少なくともいずれか一方と、
前記飛行体側ガス検知部及び前記エリア側ガス検知部のうちの少なくともいずれか一方での検知結果を基に、爆発性雰囲気が存在するか、または爆発性雰囲気が存在する虞のある危険エリアを設定する危険エリア設定部と、
前記飛行体側ガス検知部及び前記エリア側ガス検知部のうちの少なくともいずれか一方で検知した前記爆発性ガスの空気に対する比重が1よりも大きいか否かを判断する比重判断部と、
前記危険エリアを避ける前記飛行ルートとしての回避飛行ルートを生成するか否かを判断するルート生成要否判断部と、
前記ルート生成要否判断部において、前記回避飛行ルートを生成すると判断した場合に、ルート生成情報を基にして前記回避飛行ルートを生成するルート生成部と、を備えており、
前記ルート生成情報は、前記比重判断部での判断結果及び前記危険エリア設定部で設定された前記危険エリアを含み、
前記ルート生成部は、
前記比重判断部において前記比重が1よりも大きいと判断された場合に、飛行中の飛行ルートよりも前記飛行体の高度が高くなる高高度回避飛行ルートを前記回避飛行ルートとして生成し、
前記比重判断部において前記比重が1よりも大きくないと判断された場合に、飛行中の飛行ルートよりも前記飛行体の高度が低くなる低高度回避飛行ルートを前記回避飛行ルートとして生成する飛行体制御システム。 - 前記ルート生成部は、
前記高高度回避飛行ルートとして、高度を高くした元来た飛行ルートに沿って現在地から発着場へ向かう第1高高度帰還飛行ルート、及び前記第1高高度帰還飛行ルートとは異なる経路で現在地から発着場へ向かう第2高高度帰還飛行ルートのうちのいずれか一方を生成し、
前記低高度回避飛行ルートとして、高度を低くした元来た飛行ルートに沿って現在地から発着場へ向かう第1低高度帰還飛行ルート、及び前記第1低高度帰還飛行ルートとは異なる経路で現在地から発着場へ向かう第2低高度帰還飛行ルートのうちのいずれか一方を生成する請求項1に記載の飛行体制御システム。 - 前記飛行体が前記危険エリア又は前記進入禁止エリアに落下する、或いは落下する虞がある回避エリアを設定する回避エリア設定部を備えており、
前記回避エリア設定部で設定された前記回避エリアが前記ルート生成情報の一つである請求項1又は2に記載の飛行体制御システム。 - 前記飛行体の位置を検出する飛行体位置検出部と、
前記監視エリア内の風向及び風速を検出する風向風速検出部と、
前記飛行体の加速度を導出する飛行体加速度導出部と、を備えており、
前記回避エリア設定部は、前記飛行体位置検出部での検出結果、前記飛行体加速度導出部での導出結果、前記風向風速検出部での検出結果、前記飛行体の重量及び前記飛行体の受風面積を基に、前記回避エリアを設定する請求項3に記載の飛行体制御システム。 - 前記飛行体の落下予測エリアを算出する落下予測エリア算出部と、
前記落下予測エリア算出部で算出された前記落下予測エリアが、前記危険エリア設定部によって設定された前記危険エリア内又は前記進入禁止エリア内であるか否かを判断する落下エリア判断部と、を備えており、
前記飛行管理部は、
前記落下エリア判断部において、前記落下予測エリアが前記危険エリア内又は前記進入禁止エリア内であると判断した場合に、前記危険エリア又は前記進入禁止エリアへの前記飛行体の接近を回避する接近回避対応をとる請求項1~4のいずれか一項に記載の飛行体制御システム。 - 前記接近回避対応は、前記危険エリア又は前記進入禁止エリアに前記飛行体が近づかないように、前記ルート生成部で生成された前記回避飛行ルートを修正しつつ、当該回避飛行ルートに沿って前記飛行体を自動操縦により飛行させる対応である請求項5に記載の飛行体制御システム。
- 前記飛行体の遠隔操縦に関する指令を送受信可能に構成された操縦機器を備え、
前記接近回避対応は、前記危険エリア又は前記進入禁止エリアに前記飛行体が近づかないように操縦者による前記飛行体の遠隔操縦に制限を加える対応である請求項5に記載の飛行体制御システム。 - 前記飛行体の位置を検出する飛行体位置検出部と、
前記監視エリア内の風向及び風速を検出する風向風速検出部と、
前記飛行体の加速度を導出する飛行体加速度導出部と、を備えており、
前記落下予測エリア算出部は、前記飛行体位置検出部での検出結果、前記飛行体加速度導出部での導出結果、前記風向風速検出部での検出結果、前記飛行体の重量及び前記飛行体の受風面積を基に、前記落下予測エリアを算出する請求項5~7のいずれか一項に記載の飛行体制御システム。 - 前記飛行管理部は、前記ルート生成部で生成された前記回避飛行ルートに沿って前記飛行体を自動操縦により飛行させる請求項1~8のいずれか一項に記載の飛行体制御システム。
- 前記飛行体の遠隔操縦に関する指令を送受信可能に構成された操縦機器を備え、
前記飛行管理部は、前記ルート生成部で生成された前記回避飛行ルートを前記操縦機器を通じて操縦者に提示する請求項1~9のいずれか一項に記載の飛行体制御システム。 - 前記監視エリア内の風向及び風速を検出する風向風速検出部を備えており、
前記危険エリア設定部は、前記飛行体側ガス検知部及び前記エリア側ガス検知部のうちの少なくともいずれか一方での検知結果並びに前記風向風速検出部での検出結果を基に前記危険エリアを設定する請求項1~10のいずれか一項に記載の飛行体制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020186727A JP7499680B2 (ja) | 2020-11-09 | 2020-11-09 | 飛行体制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020186727A JP7499680B2 (ja) | 2020-11-09 | 2020-11-09 | 飛行体制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022076355A JP2022076355A (ja) | 2022-05-19 |
| JP7499680B2 true JP7499680B2 (ja) | 2024-06-14 |
Family
ID=81606577
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020186727A Active JP7499680B2 (ja) | 2020-11-09 | 2020-11-09 | 飛行体制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7499680B2 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011221722A (ja) | 2010-04-08 | 2011-11-04 | Yamagata Kyodo:Kk | 有毒ガス検知および避難誘導システム |
| WO2017033976A1 (ja) | 2015-08-25 | 2017-03-02 | 日本電気株式会社 | 飛行体制御装置、飛行体制御方法、及びコンピュータ読み取り可能な記録媒体 |
| JP2018505089A (ja) | 2014-12-19 | 2018-02-22 | エアロバイロメント, インコーポレイテッドAerovironment, Inc. | 無人航空機システム(uas)操縦の制御および制限のための監視安全システム |
| JP2019202682A (ja) | 2018-05-24 | 2019-11-28 | 東京瓦斯株式会社 | 無人飛行体及びその飛行制御方法 |
-
2020
- 2020-11-09 JP JP2020186727A patent/JP7499680B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011221722A (ja) | 2010-04-08 | 2011-11-04 | Yamagata Kyodo:Kk | 有毒ガス検知および避難誘導システム |
| JP2018505089A (ja) | 2014-12-19 | 2018-02-22 | エアロバイロメント, インコーポレイテッドAerovironment, Inc. | 無人航空機システム(uas)操縦の制御および制限のための監視安全システム |
| WO2017033976A1 (ja) | 2015-08-25 | 2017-03-02 | 日本電気株式会社 | 飛行体制御装置、飛行体制御方法、及びコンピュータ読み取り可能な記録媒体 |
| JP2019202682A (ja) | 2018-05-24 | 2019-11-28 | 東京瓦斯株式会社 | 無人飛行体及びその飛行制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022076355A (ja) | 2022-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109029422B (zh) | 一种多无人机协作构建三维调查地图的方法和装置 | |
| Wardihani et al. | Real-time forest fire monitoring system using unmanned aerial vehicle | |
| CN111624641A (zh) | 一种防爆型油库区智能巡检机器人 | |
| KR20170111921A (ko) | 무인 비행체 제어 방법 및 시스템 | |
| CN108459539A (zh) | 用于执行滑翔道核验过程的驾驶舱显示系统和方法 | |
| CN106997693A (zh) | 一种飞行器防撞算法验证测试方法及系统 | |
| CN116400730B (zh) | 一种飞行器低空飞行范围标定方法及系统 | |
| KR20170126637A (ko) | 무인 비행체 항로 구축 방법 및 시스템 | |
| KR20170101519A (ko) | 무인 항공기를 이용한 재난 감시 장치 및 방법 | |
| US10235893B2 (en) | Flight control method and unmanned unmannered aerial vehicle | |
| US20220341753A1 (en) | Methods and systems for detecting wind shear conditions in an urban airspace | |
| CN110632945A (zh) | 一种直升机着陆方法及系统 | |
| CN109270957A (zh) | 一种植保系统及其飞行器控制方法和装置 | |
| CN110196601A (zh) | 无人机控制方法、装置、系统和计算机可读存储介质 | |
| CN120123968A (zh) | 基于无人机搭载的gnssins视觉组合火情探测方法、系统、设备及介质 | |
| JP2010214979A (ja) | 計算機及び着陸経路計算プログラム及び記録媒体 | |
| JP7603417B2 (ja) | 飛行体制御システム | |
| JP7603418B2 (ja) | 飛行体制御システム | |
| JP7499680B2 (ja) | 飛行体制御システム | |
| KR20170103551A (ko) | 무인 차량의 주행 정보 제공 장치 및 방법 | |
| US12139255B2 (en) | Control system, control method, and information storage medium for unmanned aerial vehicle | |
| CN112106005A (zh) | 一种无人机的飞行控制方法、设备、无人机及存储介质 | |
| JP2017130133A (ja) | 航空機監視装置及び航空機監視方法 | |
| CN118646995B (zh) | 一种矿山井下人员定位方法以及系统 | |
| CN107390707A (zh) | 无人机控制系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230516 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240305 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240604 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7499680 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |