JP7501324B2 - 飼育装置 - Google Patents
飼育装置 Download PDFInfo
- Publication number
- JP7501324B2 JP7501324B2 JP2020195732A JP2020195732A JP7501324B2 JP 7501324 B2 JP7501324 B2 JP 7501324B2 JP 2020195732 A JP2020195732 A JP 2020195732A JP 2020195732 A JP2020195732 A JP 2020195732A JP 7501324 B2 JP7501324 B2 JP 7501324B2
- Authority
- JP
- Japan
- Prior art keywords
- roller
- belt conveyor
- contact state
- rearing
- separating member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02A—TECHNOLOGIES FOR ADAPTATION TO CLIMATE CHANGE
- Y02A40/00—Adaptation technologies in agriculture, forestry, livestock or agroalimentary production
- Y02A40/80—Adaptation technologies in agriculture, forestry, livestock or agroalimentary production in fisheries management
- Y02A40/81—Aquaculture, e.g. of fish
Landscapes
- Cultivation Receptacles Or Flower-Pots, Or Pots For Seedlings (AREA)
- Housing For Livestock And Birds (AREA)
Description
飼育装置において飼育対象とする生物は、例えば、節足動物等の小生物である。飼育対象の生物は、例えば、食用、飼料用、研究用等に用いられる生物である。飼育対象の昆虫としては、コオロギ、イナゴ、バッタ等があげられる。特に、飼育対象の生物は、幼虫が直接成虫に変態する不完全変態の節足動物であって、さらには、不完全変態における幼虫が好適である。本例における飼育対象の生物は、昆虫のうち、バッタ目のコオロギやイナゴの幼虫を好適な例として説明する。ただし、成虫(羽化した不完全変態節足動物)を飼育対象の生物としても良い。また、飼育装置は、卵から飼育しても良いし、孵化後の生物を飼育しても良い。
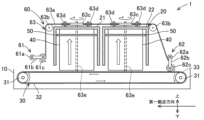
飼育装置1の基本構成について、図1を参照して説明する。飼育装置1は、図1に示すように、基本構成として、ベース10、フレーム20、ベルトコンベア30を備える。ベース10は、設置面上に配置される。
第一フレーム21及び第二フレーム22のそれぞれの飼育空間の内部構成について、図1-図5を参照して説明する。飼育装置1は、第一フレーム21及び第二フレーム22のそれぞれの飼育空間に、止まり部材40及び引離部材50を備える。
引離部材50は、上述したように、止まり部材40に沿って上下に移動する。飼育装置1における引離部材50の駆動機構について、図1-図5を参照して説明する。
飼育装置1の動作について、図1、図6-図10を参照して説明する。初期状態として、図1に示すように、第一フレーム21及び第二フレーム22のそれぞれの飼育空間において、引離部材50が上方に位置する。さらに、第一駆動装置61a及び第二駆動装置62aによって、第一ローラ61c及び第二ローラ62cは、共に、ベルトコンベア30に対して非接触状態とされている。そして、この初期状態において、飼育対象の生物は、第一フレーム21及び第二フレーム22のそれぞれの飼育空間において飼育されている。
上述した飼育装置1によれば、止まり部材40に飼育対象の生物が止まることが可能である。従って、止まり部材40が隠れ場所として利用できるため、飼育対象の生物にとって良好な生育環境となる。
上述した飼育装置1においては、ベルトコンベア30が第一搬送方向のみに搬送する場合を説明した。つまり、第一ローラ61cが時計回り(正回転)に回転することにより引離部材50が下降し、第二ローラ62cが時計回り(正回転)に回転することにより引離部材50が上昇する。
Claims (8)
- 生物の飼育空間を形成するフレームと、
前記飼育空間の底部に配置され、前記生物、前記生物の抜け殻、餌、水分、塵埃の少なくとも1つを搬送するベルトコンベアと、
前記飼育空間内において上下方向に延びるように配置され、前記生物が止まることが可能な止まり部材と、
前記止まり部材に沿って下方へ移動することにより前記止まり部材に止まっている前記生物を前記止まり部材から引き離す引離部材と、
前記ベルトコンベアに対して接触状態と非接触状態とを切替可能に設けられ、前記接触状態において前記ベルトコンベアの搬送力を駆動源として前記引離部材を上下動させる動力伝達機構と、
を備える、飼育装置。 - 前記動力伝達機構は、
前記ベルトコンベアに対して前記接触状態と前記非接触状態とを切替可能に設けられ、前記接触状態において前記ベルトコンベアの搬送力により回転可能なローラと、
前記ローラと前記引離部材との間を連結し、前記ローラの回転を上下動に変換し、変換された上下動によって前記引離部材を上下動させる変換機構と、
を備える、請求項1に記載の飼育装置。 - 前記ローラは、前記非接触状態において自由回転を規制されている、請求項2に記載の飼育装置。
- 前記ベルトコンベアは、一方向に搬送可能であり、
前記動力伝達機構は、
前記ローラであって、前記接触状態において前記ベルトコンベアの搬送方向の搬送力により正回転可能な第一ローラと、
前記ローラであって、前記接触状態において前記ベルトコンベアの搬送方向の搬送力により正回転可能な第二ローラと、
前記第一ローラと前記引離部材との間を連結すると共に前記第二ローラと前記引離部材との間を連結し、前記第一ローラの正回転を下方への移動に変換し、前記第二ローラの正回転を上方への移動に変換し、変換された上方への移動及び下方への移動によって前記引離部材を上下動させる前記変換機構と、
を備える、請求項2又は3に記載の飼育装置。 - 前記ベルトコンベアは、両方向に搬送可能であり、
前記動力伝達機構は、
前記ローラであって、前記接触状態において前記ベルトコンベアの第一搬送方向の搬送力により正回転可能な第一ローラと、
前記ローラであって、前記接触状態において前記ベルトコンベアの第二搬送方向の搬送力により逆回転可能な第二ローラと、
前記第一ローラと前記引離部材との間を連結すると共に前記第二ローラと前記引離部材との間を連結し、前記第一ローラの正回転を下方への移動に変換し、前記第二ローラの逆回転を上方への移動に変換し、変換された上方への移動及び下方への移動によって前記引離部材を上下動させる前記変換機構と、
を備える、請求項2又は3に記載の飼育装置。 - 前記変換機構は、
前記ローラの回転に伴って前記ローラに巻回され、前記止まり部材の上方領域において前記ベルトコンベアの搬送方向に延在するように配置される紐状部材と、
前記紐状部材による前記搬送方向への移動に伴って回転する回転部材と、
前記回転部材の回転を上下動に変換し、変換された上下動の動力を前記引離部材に伝達する機構と、
を備える、請求項2-5の何れか1項に記載の飼育装置。 - 前記動力伝達機構は、さらに、
前記ローラを上下動させ、前記接触状態と前記非接触状態とを切り替える切替機構を備える、請求項2-6の何れか1項に記載の飼育装置。 - 前記フレームは、複数の前記飼育空間を形成し、
前記ベルトコンベアは、複数の前記飼育空間に跨って配置され、
前記止まり部材及び前記引離部材は、複数の前記飼育空間のそれぞれに配置され、
前記動力伝達機構は、前記接触状態において前記ベルトコンベアの搬送力を駆動源として複数の前記引離部材を上下動させる、請求項1-7の何れか1項に記載の飼育装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020195732A JP7501324B2 (ja) | 2020-11-26 | 2020-11-26 | 飼育装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020195732A JP7501324B2 (ja) | 2020-11-26 | 2020-11-26 | 飼育装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022084104A JP2022084104A (ja) | 2022-06-07 |
| JP7501324B2 true JP7501324B2 (ja) | 2024-06-18 |
Family
ID=81868351
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020195732A Active JP7501324B2 (ja) | 2020-11-26 | 2020-11-26 | 飼育装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7501324B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023172365A (ja) | 2022-05-23 | 2023-12-06 | 住友金属鉱山株式会社 | リチウムイオン二次電池用正極活物質とその製造方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002142641A (ja) | 2000-11-09 | 2002-05-21 | Tetsuo Fukita | ゴキブリ捕獲器及びゴキブリ取り出し体 |
| US20170360014A1 (en) | 2016-06-20 | 2017-12-21 | Aspire Food Group USA Inc. | Autonomous feed delivery platform for insects |
| JP2018509167A (ja) | 2015-03-24 | 2018-04-05 | プロティ−ファーム アール アンド ディー ビー.ヴイ. | 昆虫を繁殖させるための方法及び設備 |
| KR101970312B1 (ko) | 2018-10-05 | 2019-04-18 | 이상무 | 귀뚜라미 사육설비 |
| JP6746153B1 (ja) | 2019-09-19 | 2020-08-26 | 株式会社ムスカ | イエバエ幼虫飼育方法及びその飼育設備 |
| WO2021214375A1 (en) | 2020-04-24 | 2021-10-28 | Entocube Oy | Method and system for rearing insects |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2829852B2 (ja) * | 1996-12-30 | 1998-12-02 | 学 立石 | 餌料用コオロギの繁殖方法 |
-
2020
- 2020-11-26 JP JP2020195732A patent/JP7501324B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002142641A (ja) | 2000-11-09 | 2002-05-21 | Tetsuo Fukita | ゴキブリ捕獲器及びゴキブリ取り出し体 |
| JP2018509167A (ja) | 2015-03-24 | 2018-04-05 | プロティ−ファーム アール アンド ディー ビー.ヴイ. | 昆虫を繁殖させるための方法及び設備 |
| US20200146270A1 (en) | 2015-03-24 | 2020-05-14 | Proti-Farm R & D B.V. | Method and facility for breeding insects |
| US20170360014A1 (en) | 2016-06-20 | 2017-12-21 | Aspire Food Group USA Inc. | Autonomous feed delivery platform for insects |
| KR101970312B1 (ko) | 2018-10-05 | 2019-04-18 | 이상무 | 귀뚜라미 사육설비 |
| JP6746153B1 (ja) | 2019-09-19 | 2020-08-26 | 株式会社ムスカ | イエバエ幼虫飼育方法及びその飼育設備 |
| WO2021214375A1 (en) | 2020-04-24 | 2021-10-28 | Entocube Oy | Method and system for rearing insects |
| JP2023529271A (ja) | 2020-04-24 | 2023-07-10 | エーセー・ホールディング・オサケユフティオ | 昆虫飼育方法およびシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022084104A (ja) | 2022-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7501324B2 (ja) | 飼育装置 | |
| JP7669670B2 (ja) | 飼育装置 | |
| CN202070486U (zh) | 黄粉虫分离机 | |
| CN114303976B (zh) | 一种大型养殖场用移动式农副产品饲料投喂设备 | |
| CN220343294U (zh) | 一种虫粪分离系统 | |
| CN111887209B (zh) | 一种善飞型昆虫的饲养装置及饲养方法 | |
| CN109349164B (zh) | 鸡蛋分拣装置 | |
| CN111496867A (zh) | 一种多芽段种芽蔗种切断机构 | |
| KR102938279B1 (ko) | 누에 잔분 제거 장치 | |
| CN216650941U (zh) | 一种蛋鸡喂养饲料循环供给装置 | |
| CN216219537U (zh) | 一种用于节能养殖设备的喂料架推动装置 | |
| CN109463347B (zh) | 一种全自动取盒输送机 | |
| CN113877859B (zh) | 一种畜牧业养殖用土豆清洗装置 | |
| CN222815078U (zh) | 一种福利笼宽面蛋带集蛋机机构 | |
| CN218851874U (zh) | 一种实验动物垫料的灭菌装置 | |
| CN221602519U (zh) | 一种黑水虻养殖用虫沙分离装置 | |
| US1150286A (en) | Conveying and separating apparatus. | |
| CN113951178B (zh) | 一种用于节能养殖设备的喂料架推动装置 | |
| CN222287412U (zh) | 一种高效的破碎饲料分级筛选装置 | |
| CN115420090B (zh) | 一种用于畜牧场动物粪便发酵前烘干用的烘干设备 | |
| CN213074032U (zh) | 一种用于规模化鸡笼用禽蛋传输带 | |
| CN203087028U (zh) | 油菜籽脱粒机 | |
| CN203057886U (zh) | 油菜籽脱粒机 | |
| CN216910941U (zh) | 一种保健品加工用的片剂筛选装置 | |
| CN112875318B (zh) | 一种可实现工作面上下层平移并能自动翻倒的装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20210301 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20220915 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230914 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20230914 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240319 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240520 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7501324 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |