JP7501432B2 - Waste information prediction device, incinerator combustion control device, waste information prediction method, waste information prediction model learning method, and waste information prediction model program - Google Patents
Waste information prediction device, incinerator combustion control device, waste information prediction method, waste information prediction model learning method, and waste information prediction model program Download PDFInfo
- Publication number
- JP7501432B2 JP7501432B2 JP2021065637A JP2021065637A JP7501432B2 JP 7501432 B2 JP7501432 B2 JP 7501432B2 JP 2021065637 A JP2021065637 A JP 2021065637A JP 2021065637 A JP2021065637 A JP 2021065637A JP 7501432 B2 JP7501432 B2 JP 7501432B2
- Authority
- JP
- Japan
- Prior art keywords
- waste
- information
- information prediction
- incinerator
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Incineration Of Waste (AREA)
Description
本発明は、廃棄物情報予測装置、焼却炉の燃焼制御装置、廃棄物情報予測方法、廃棄物情報予測モデルの学習方法および廃棄物情報予測モデルプログラムに関する。 The present invention relates to a waste information prediction device, an incinerator combustion control device, a waste information prediction method, a waste information prediction model learning method, and a waste information prediction model program.
焼却炉等の廃棄物処理プラントでは、投入される廃棄物の情報(例えばカロリー等)を予め把握しておくことが、炉内で廃棄物を安定燃焼させるために非常に有効である。 In waste treatment plants such as incinerators, knowing information about the waste being fed into the plant (such as calories) in advance is extremely effective in ensuring stable combustion of the waste inside the furnace.
廃棄物に関する情報を予測する技術として、例えば特許文献1には、オプティカルフローを用いて、廃棄物の燃焼状態を撮像した時系列画像の対応付けを行い、廃棄物に関する情報を予測する予測モデルの学習を行う技術が開示されている。また、特許文献2には、乾燥帯寄りの廃棄物の燃焼温度分布を示し、かつ3~4μm帯の波長だけが記録された二次元画像に基づいて、乾燥帯上の廃棄物の燃え出し点を検出する技術が開示されている。
For example,
しかしながら、特許文献1,2で開示された技術では、焼却炉内の廃棄物の状態と相関のある特徴量を抽出していないため、廃棄物に関する情報を精度よく予測することは困難であった。また、そのような精度の低い特徴量を用いたとしても、焼却炉等の廃棄物処理プラントを効率よく制御することはできなかった。
However, the technologies disclosed in
また、特許文献3では、ごみが燃焼帯に搬送される前にごみの厚み方向断面の温度分布に基づいてごみの含水量を推定する技術が開示されている。しかし、特許文献3では、厚み方向断面の温度分布を把握する必要があり、ごみの比較的広い領域の温度情報が必要となる。そのため、温度分布把握に時間が掛かり、ごみが落下する前の炉内滞留時間に前記温度分布が左右されるため、ごみ質把握の点でもあまり精度が高くない。
本発明は、上記に鑑みてなされたものであって、焼却炉内の廃棄物に関する情報を精度よく予測することができる廃棄物情報予測装置、焼却炉の燃焼制御装置、廃棄物情報予測方法、廃棄物情報予測モデルの学習方法および廃棄物情報予測モデルプログラムを提供することを目的とする。 The present invention has been made in consideration of the above, and aims to provide a waste information prediction device, an incinerator combustion control device, a waste information prediction method, a waste information prediction model learning method, and a waste information prediction model program that can accurately predict information about waste in an incinerator.
上述した課題を解決し、目的を達成するために、本発明に係る廃棄物情報予測装置は、焼却炉内の廃棄物に関する情報を予測する廃棄物情報予測装置であって、外部で撮影された前記廃棄物の撮影画像情報を入力可能な入力部と、前記入力部から入力される前記廃棄物の前記撮影画像情報を複数のブロックに分割し、分割された前記複数のブロックの少なくとも一つを所定時間追跡して当該追跡ブロックの特徴量を算出する特徴量算出手段と、前記廃棄物の特徴量と前記廃棄物に関する情報とを対応付けた関係モデルを記憶した記憶部と、制御手段と、を有し、前記制御手段は、前記入力部から入力される、前記焼却炉内の前記廃棄物を撮影して得た撮影画像情報から、前記特徴量算出手段により前記廃棄物の特徴量を算出し、前記記憶部に記憶される前記関係モデルに基づき前記廃棄物に関する情報を予測することを特徴とする。 In order to solve the above-mentioned problems and achieve the object, the waste information prediction device of the present invention is a waste information prediction device that predicts information about waste in an incinerator, and has an input unit that can input photographed image information of the waste photographed outside, a feature calculation means that divides the photographed image information of the waste input from the input unit into multiple blocks and tracks at least one of the divided multiple blocks for a predetermined period of time to calculate the feature amount of the tracked block, a storage unit that stores a relationship model that associates the feature amount of the waste with information about the waste, and a control means, and the control means calculates the feature amount of the waste by the feature calculation means from the photographed image information obtained by photographing the waste in the incinerator input from the input unit, and predicts information about the waste based on the relationship model stored in the storage unit.
また、本発明に係る廃棄物情報予測装置は、上記発明において、前記特徴量は、前記廃棄物の温度変化量、前記廃棄物の移動量、前記撮影画像情報に設定される前記廃棄物の分割された複数のブロックの総数のうち、少なくとも一つを含むことを特徴とする。 The waste information prediction device according to the present invention is characterized in that, in the above invention, the feature amount includes at least one of the amount of temperature change of the waste, the amount of movement of the waste, and the total number of multiple blocks into which the waste is divided and set in the captured image information.
また、本発明に係る廃棄物情報予測装置は、上記発明において、前記廃棄物に関する情報は、前記廃棄物の燃焼時に発生するカロリー、前記廃棄物の燃焼時に前記焼却炉のボイラから発生する水蒸気量のうち、少なくとも一つを含むことを特徴とする。 The waste information prediction device according to the present invention is characterized in that, in the above invention, the information about the waste includes at least one of the calories generated when the waste is burned and the amount of water vapor generated from the boiler of the incinerator when the waste is burned.
また、本発明に係る廃棄物情報予測装置は、上記発明において、前記制御手段で予測された前記廃棄物に関する情報を出力する出力部を有することを特徴とする。 The waste information prediction device according to the present invention is characterized in that it has an output unit that outputs information about the waste predicted by the control means in the above invention.
また、本発明に係る廃棄物情報予測装置は、上記発明において、前記入力部から入力される前記廃棄物の撮影画像情報は、前記焼却炉の火格子に供給される前の供給前廃棄物を撮影して得られる撮影画像情報であることを特徴とする。 The waste information prediction device according to the present invention is characterized in that, in the above invention, the photographed image information of the waste input from the input unit is photographed image information obtained by photographing the waste before it is supplied to the grate of the incinerator.
また、本発明に係る廃棄物情報予測装置は、上記発明において、前記記憶部に記憶される関係モデルは、過去の廃棄物の特徴量と、前記過去の廃棄物に関する情報との関係から学習して得られた学習済廃棄物情報予測モデルであることを特徴とする。 The waste information prediction device according to the present invention is characterized in that, in the above invention, the relational model stored in the storage unit is a learned waste information prediction model obtained by learning from the relationship between the feature quantities of past waste and information about the past waste.
また、本発明に係る廃棄物情報予測装置は、上記発明において、前記記憶部に記憶される関係モデルは、過去の廃棄物の特徴量を入力値とし、前記過去の廃棄物に関する情報を出力値とするルックアップテーブルまたは所定の関数であることを特徴とする。 The waste information prediction device according to the present invention is characterized in that, in the above invention, the relational model stored in the storage unit is a lookup table or a predetermined function in which the feature quantities of past waste are input values and information about the past waste is output values.
上述した課題を解決し、目的を達成するために、本発明に係る焼却炉の燃焼制御装置は、廃棄物を燃焼させる焼却炉を制御する燃焼制御部を備える燃焼制御装置であって、前記燃焼制御部は、上記の廃棄物情報予測装置から出力された廃棄物に関する情報に基づいて、前記焼却炉における燃焼を制御することを特徴とする。 In order to solve the above-mentioned problems and achieve the objectives, the incinerator combustion control device of the present invention is a combustion control device that includes a combustion control unit that controls an incinerator that combusts waste, and is characterized in that the combustion control unit controls combustion in the incinerator based on information about waste output from the waste information prediction device.
また、本発明に係る焼却炉の燃焼制御装置は、上記発明において、前記焼却炉は、前記廃棄物を移動させる火格子と、前記火格子上に前記廃棄物を供給する廃棄物供給装置と、前記焼却炉内に空気を送風する送風機と、を備え、前記燃焼制御部は、前記廃棄物に関する情報に基づいて、前記火格子上における前記廃棄物の移動速度、前記廃棄物供給装置による前記廃棄物の供給速度、前記送風機による空気の送風量、前記送風機による空気の温度のうち、少なくとも一つを制御することを特徴とする。 The incinerator combustion control device according to the present invention is characterized in that, in the above invention, the incinerator comprises a grate for moving the waste, a waste supply device for supplying the waste onto the grate, and a blower for blowing air into the incinerator, and the combustion control unit controls at least one of the speed at which the waste moves on the grate, the speed at which the waste is supplied by the waste supply device, the amount of air blown by the blower, and the temperature of the air blown by the blower based on information about the waste.
上述した課題を解決し、目的を達成するために、本発明に係る廃棄物情報予測方法は、焼却炉内の廃棄物に関する情報を予測する廃棄物情報予測方法であって、焼却炉内に投入される廃棄物の撮影画像情報を取得する画像取得工程と、前記画像取得工程で取得された前記廃棄物の撮影画像情報を複数のブロックに分割し、分割された前記複数のブロックの少なくとも一つを追跡して当該追跡ブロックの特徴量を算出する特徴量算出工程と、前記特徴量算出工程で算出された前記廃棄物の特徴量から、前記廃棄物に関する情報を予測する廃棄物情報予測工程と、を有することを特徴とする。 In order to solve the above-mentioned problems and achieve the objective, the waste information prediction method of the present invention is a waste information prediction method for predicting information about waste in an incinerator, and is characterized by having an image acquisition process for acquiring photographed image information of the waste put into the incinerator, a feature amount calculation process for dividing the photographed image information of the waste acquired in the image acquisition process into a plurality of blocks, tracking at least one of the divided blocks and calculating the feature amount of the tracked block, and a waste information prediction process for predicting information about the waste from the feature amount of the waste calculated in the feature amount calculation process.
また、本発明に係る廃棄物情報予測方法は、上記発明において、前記廃棄物情報予測工程は、前記廃棄物の特徴量と前記廃棄物に関する情報とを予め対応付けた関係モデルを用いて予測することを特徴とする。 The waste information prediction method according to the present invention is characterized in that, in the above invention, the waste information prediction step makes predictions using a relational model in which the waste characteristics and information about the waste are previously associated with each other.
また、本発明に係る廃棄物情報予測方法は、上記発明において、前記関係モデルは、過去の廃棄物の特徴量と、前記過去の廃棄物に関する情報との関係から学習して得られた学習済廃棄物情報予測モデルであることを特徴とする。 The waste information prediction method according to the present invention is characterized in that, in the above invention, the relational model is a learned waste information prediction model obtained by learning from the relationship between the feature quantities of past waste and information about the past waste.
また、本発明に係る廃棄物情報予測方法は、上記発明において、前記関係モデルは、過去の廃棄物の特徴量を入力値とし、前記過去の廃棄物に関する情報を出力値とするルックアップテーブルまたは所定の関数であることを特徴とする。 The waste information prediction method according to the present invention is characterized in that, in the above invention, the relational model is a lookup table or a predetermined function that uses the feature quantities of past waste as input values and information about the past waste as output values.
また、本発明に係る廃棄物情報予測方法は、上記発明において、前記画像取得工程で取得される前記廃棄物の撮影画像情報は、前記焼却炉の火格子に供給される前の供給前廃棄物を撮影して得られる撮影画像情報であることを特徴とする。 The waste information prediction method according to the present invention is characterized in that, in the above invention, the photographed image information of the waste acquired in the image acquisition process is photographed image information obtained by photographing the waste before it is supplied to the grate of the incinerator.
また、本発明に係る廃棄物情報予測方法は、上記発明において、前記廃棄物情報予測工程で予測された廃棄物情報に基づいて、前記焼却炉の燃焼を制御する燃焼制御工程を更に有することを特徴とする。 The waste information prediction method according to the present invention is characterized in that it further includes a combustion control step for controlling combustion in the incinerator based on the waste information predicted in the waste information prediction step.
上述した課題を解決し、目的を達成するために、本発明に係る廃棄物情報予測モデルの学習方法は、焼却炉内の廃棄物に関する情報を予測する廃棄物情報予測モデルの学習方法であって、廃棄物を焼却する焼却炉内の廃棄物の撮影画像情報を複数のブロックに分割し、分割された前記複数のブロックの少なくとも一つを追跡し、当該追跡ブロックから算出した特徴量を入力値とし、前記廃棄物に関する情報を出力値として、過去の前記特徴量とそれに対する過去の前記廃棄物に関する情報との関係を、前記廃棄物情報予測モデルに学習させることを特徴とする。 In order to solve the above-mentioned problems and achieve the objective, the waste information prediction model learning method of the present invention is a waste information prediction model learning method for predicting information about waste in an incinerator, which is characterized in that it divides photographed image information of waste in an incinerator that incinerates waste into a plurality of blocks, tracks at least one of the plurality of divided blocks, uses a feature amount calculated from the tracked block as an input value, and uses information about the waste as an output value, and causes the waste information prediction model to learn the relationship between the past feature amount and the corresponding past information about the waste.
上述した課題を解決し、目的を達成するために、本発明に係る廃棄物情報予測モデルプログラムは、記録媒体に記録可能な、焼却炉内の廃棄物に関する情報を予測する廃棄物情報予測モデルプログラムであって、前記廃棄物を撮影した撮影画像情報に設定された複数のブロックを追跡した追跡ブロックから算出した特徴量が入力された際に、前記廃棄物に関する情報を出力するように学習されたことを特徴とする。 In order to solve the above-mentioned problems and achieve the objective, the waste information prediction model program of the present invention is a waste information prediction model program that can be recorded on a recording medium and predicts information about waste in an incinerator, and is characterized in that it is trained to output information about the waste when a feature calculated from a tracking block that tracks multiple blocks set in photographed image information of the waste is input.
本発明に係る廃棄物情報予測装置、焼却炉の燃焼制御装置、廃棄物情報予測方法、廃棄物情報予測モデルの学習方法および廃棄物情報予測モデルプログラムによれば、焼却炉内の廃棄物の動きを予め設定した複数のブロックごとに追跡し、各ブロックの特徴量を予測モデルに学習させることにより、焼却炉内の廃棄物に関する情報を精度よく予測することができ、予測した廃棄物情報に基づいて、焼却炉等の廃棄物処理プラントを効率よく制御することが可能となる。 According to the waste information prediction device, incinerator combustion control device, waste information prediction method, waste information prediction model learning method, and waste information prediction model program of the present invention, the movement of waste within the incinerator is tracked in multiple pre-set blocks, and the feature values of each block are trained into a prediction model, making it possible to accurately predict information about waste within the incinerator, and to efficiently control waste treatment plants such as incinerators based on the predicted waste information.
本発明の実施形態に係る廃棄物情報予測装置、焼却炉の燃焼制御装置、廃棄物情報予測方法、廃棄物情報予測モデルの学習方法および廃棄物情報予測モデルプログラムについて、図面を参照しながら説明する。なお、以下の実施形態で参照する図面では、同一または対応する部分には同一の符号を付す。また、本発明は、以下の実施形態によって限定されるものではない。 The waste information prediction device, incinerator combustion control device, waste information prediction method, waste information prediction model learning method, and waste information prediction model program according to the embodiments of the present invention will be described with reference to the drawings. Note that in the drawings referred to in the following embodiments, the same or corresponding parts are given the same reference numerals. Furthermore, the present invention is not limited to the following embodiments.
ここで、例えば火格子(ストーカ)式の焼却炉等を効率よく制御するためには、焼却炉で燃焼される廃棄物に関する情報(以下、「廃棄物情報」という)を把握することが重要である。そこで、本発明者は、焼却炉内の廃棄物の動きを予め設定した複数のブロックごとに追跡し、各ブロックの特徴量を予測モデルに学習させ、当該予測モデルを用いて、廃棄物情報を予測(推定)する。以下で説明する実施形態は、以上の本発明者の鋭意検討に基づいて案出されたものである。 Here, in order to efficiently control, for example, a grate (stoker) type incinerator, it is important to understand information about the waste being burned in the incinerator (hereinafter referred to as "waste information"). Therefore, the present inventor tracks the movement of waste inside the incinerator in multiple pre-set blocks, trains a prediction model to learn the features of each block, and predicts (estimates) waste information using the prediction model. The embodiment described below was devised based on the inventor's diligent investigations.
(焼却炉)
本発明の実施形態に係る廃棄物情報予測装置が適用される焼却炉について、図1を参照しながら説明する。焼却炉は、例えば火格子式の焼却炉であり、廃棄物を用いて発電を行うプラント等に設けられる。焼却炉は、廃棄物の燃焼が行われる炉1と、廃棄物を投入する廃棄物投入口2と、廃棄物供給装置3と、火格子4と、灰落下口5と、炉1内に空気を送風する送風機(燃焼用空気ブロア6、二次空気ブロア11)と、炉出口7と、煙突8と、熱交換器9aおよび蒸気ドラム9bを備えるボイラ9と、二次空気吹き込み口10と、を備えている。
(Incinerator)
An incinerator to which the waste information prediction device according to the embodiment of the present invention is applied will be described with reference to Fig. 1. The incinerator is, for example, a grate-type incinerator, and is installed in a plant that generates power using waste. The incinerator includes a
燃焼用空気ブロア6の直近には、燃焼用空気ダンパ14が設けられている。また、火格子4の下の風箱には、火格子下燃焼用空気ダンパ14a,14b,14c,14dが設けられている。また、二次空気ブロア11の直近には、二次空気ダンパ15が設けられている。また、炉1内には、炉1の高さ方向に沿った上側の位置に中間天井16が設けられている。
A
また、炉1内には、燃焼室ガス温度計17と、主煙道ガス温度計18と、炉出口下部ガス温度計19と、炉出口中部ガス温度計20と、炉出口ガス温度計21とが設けられている。また、ボイラ9には、ボイラ出口酸素濃度計22および蒸気流量計25が設けられている。また、煙突8の入口には、ガス濃度計23が設けられている。また、ボイラ9の出口と煙突8とを接続する配管には、排ガス流量計24が設けられている。これらの計器によって計測された計測値は、燃焼プロセス測定値として燃焼制御装置30に送信され、記憶部32(図4参照)に記憶される。
In addition, the
炉1における廃棄物の搬送方向の下流側には、撮像部26が設けられている。撮像部26は、例えば赤外線カメラから構成される火炎透過カメラ、および撮像した画像データを処理する画像処理部を有して構成される。
An
撮像部26の設置状態について、図2を参照しながら説明する。撮像部26は、同図に示すように、炉1外であって、炉壁1aに設けられた監視窓に近接して配設されている。なお、撮像部26は、例えば水冷構造を付加して、炉1内に配設されてもよい。廃棄物50は、段差壁13の部分で廃棄物供給部12から火格子4上に落下する。火格子4上に落下した廃棄物50は、火格子4の前後移動に伴う往復運動によって攪拌されつつ、撮像部26側である前方に移動される。
The installation state of the
撮像部26は、火格子4上の廃棄物50(以下、「火格子上廃棄物52」という)のサーモグラフィ情報を撮影画像情報(熱画像情報)として取得する。ここで、廃棄物50から放射される赤外線の波長と、空間における高温ガスおよび火炎から放射される赤外線の波長とは異なる。そのため、撮像部26においては、測定する赤外線波長を適切に選定することにより、測定視野内に火炎が存在していても、火格子上廃棄物52の層の温度分布に対応する撮影画像情報を得ることができる。また、撮像部26は、炉長方向の測定範囲を設定することにより、燃焼領域より上流側位置(火炎より上流側)での火格子上廃棄物52の層の撮影画像情報を得ることができる。撮影画像情報は、火炎を透過した状態の映像データ、すなわち複数の画像データとして扱うことができる。
The
換言すると、撮像部26は、廃棄物供給部12から送り出される廃棄物50(以下、「供給前廃棄物51」という)と、廃棄物50が落下する段差を有する段差壁13と、火格子上廃棄物52と、火格子4の上面とを、火炎を透過した状態で撮像可能である。なお、焼却炉では、火格子上廃棄物52の燃焼状態、すなわち火炎自体を撮像する燃焼画像撮像部を更に設けてもよい。撮像部26が撮像した火炎を透過した状態で撮像した撮影画像情報は、即時または所定の時間間隔で、廃棄物情報予測装置40に送信される。なお、撮像部26が撮像した撮影画像情報を、燃焼制御装置30の記憶部32に記憶させた後に、燃焼制御装置30から廃棄物情報予測装置40に送信してもよい。
In other words, the
撮像部26は、例えば廃棄物供給部12および段差壁13に対して略正対する位置に設置される。なお、撮像部26の設置は、廃棄物供給部12および段差壁13に対して略正対する位置に限定されない。
The
撮像部26の視野の一例について、図3を参照しながら説明する。同図に示すように、撮像部26は、例えば炉1の上下方向および炉幅方向(左右方向)に拡がる測定視野を有している。撮像部26の視野は、廃棄物供給部12、段差壁13、火格子4および左右の炉壁1aである。また、撮像部26の視野に含まれる炉壁1aは、廃棄物50の左右方向の外側への移動、すなわち拡がりを規制する。なお、撮像部26は、廃棄物供給部12まで搬送された廃棄物50を撮像できるように構成することが好ましい。これにより、段差壁13の位置で落下する廃棄物50を撮像することができる。
An example of the field of view of the
燃焼制御装置30および廃棄物情報予測装置40の構成について、図4を参照しながら説明する。燃焼制御装置30と廃棄物情報予測装置40とは、例えば専用線、インターネット等の公衆通信網(例えばLAN(Local Area Network)、WAN(Wide Area Network)および携帯電話等の電話通信網、公衆回線、VPN(Virtual Private Network))等の一または複数の組み合わせからなるネットワーク(図示せず)を介して、接続されている。
The configurations of the
燃焼制御装置30および廃棄物情報予測装置40は、図4に示すようにそれぞれ別々に構成されてもよく、あるいは一体で構成されてもよい。また、燃焼制御装置30および廃棄物情報予測装置40は、焼却炉と同じ施設内に設置されてもよく、あるいは焼却炉と別の施設内に設置されてもよい。燃焼制御装置30および廃棄物情報予測装置40がそれぞれ別の施設内に設置される場合、上述したネットワークを介して各種情報や各種データの通信が行われる。
The
燃焼制御装置30は、制御部31と、記憶部32と、操作量調整部33と、を備えている。制御部31および操作量調整部33は、焼却炉を制御する燃焼制御部として機能する。制御部31および操作量調整部33は、具体的には、ハードウェアを有するCPU(Central Processing Unit)、DSP(Digital Signal Processor)、FPGA(Field-Programmable Gate Array)等のプロセッサと、RAM(Random Access Memory)やROM(Read Only Memory)等の主記憶部(いずれも図示せず)と、を備えている。
The
記憶部32は、RAM等の揮発性メモリ、ROM等の不揮発性メモリ、EPROM(Erasable Programmable ROM)、ハードディスクドライブ(HDD、Hard Disk Drive)、リムーバブルメディア等の記憶媒体により構成される。なお、リムーバブルメディアとしては、例えばUSB(Universal Serial Bus)メモリ、CD(Compact Disc)、DVD(Digital Versatile Disc)、BD(Blu-ray(登録商標) Disc)等のディスク記録媒体が挙げられる。また、外部から装着可能なメモリカード等のコンピュータ読み取り可能な記録媒体を用いて、記憶部32を構成してもよい。
The
記憶部32には、燃焼制御装置30の動作を実行するためのオペレーティングシステム(Operating System:OS)、各種プログラム、各種テーブル、各種データベース等が記憶可能である。ここで、各種プログラムには、本実施形態による学習モデルや学習済みモデル等のモデルに基づいた処理を実現する、情報処理プログラムも含まれる。これらの各種プログラムは、ハードディスク、フラッシュメモリ、CD-ROM、DVD-ROM、フレキシブルディスク等のコンピュータ読み取り可能な記録媒体に記録して広く流通させることも可能である。
The
燃焼制御装置30は、廃棄物情報予測装置40から出力された廃棄物情報に基づいて、それぞれの操作端の操作量として、焼却炉における廃棄物50の燃焼を制御する燃焼制御工程を行う。燃焼制御装置30は、具体的には、廃棄物情報に基づいて、火格子4上における廃棄物50の移動速度(「火格子送り速度」ともいう)、廃棄物供給装置3による廃棄物50の供給速度(「廃棄物供給装置送り速度」ともいう)、燃焼用空気ブロア6による燃焼用空気の送風量および温度、二次空気ブロア11による二次空気の送風量および温度のうち、少なくとも一つを制御する。
The
なお、燃焼制御装置30は、廃棄物情報予測装置40から取得した廃棄物情報に加えて、予め定められた操作量基準値設定関係式(以下、「操作量関係式」という)を考慮して、上記の操作量を制御してもよい。この操作量関係式は、例えば廃棄物焼却量設定値と操作量基準値(操作量の目標値)との関係式であって、補正係数としての制御パラメータを含む。制御パラメータは、制御部31によって、廃棄物焼却量設定値に適合するように調整される。調整された制御パラメータは、廃棄物焼却量設定値が変更された際に、変更された設定値に対応して、制御部31により変更される。制御パラメータが変更されることにより、予め設定された操作量基準値が補正される。
The
制御部31は、廃棄物情報予測装置40から取得した廃棄物情報と、必要に応じて考慮される操作量関係式における制御パラメータの調整とに基づいて、操作量基準値を調整する。制御部31は、調整した操作量基準値を、例えばPID制御やファジィ演算等の所定の制御アルゴリズムに基づいて補正する。記憶部32は、制御部31によって参照されるデータを記憶する。記憶部32には、例えば予め定められた操作量関係式、制御アルゴリズム、予め設定された廃棄物焼却量設定値、炉1内の燃焼状態量として取得された燃焼プロセス測定値等が記憶されている。
The
操作量調整部33は、操作量基準値に追従するように各操作端のそれぞれの操作量を調整する。操作量調整部33は、具体的には、燃焼用空気調整部331と、空気量比率調整部332と、二次空気調整部333と、廃棄物供給装置送り速度調整部334と、火格子送り速度調整部335を備えている。
The operation amount adjustment unit 33 adjusts the operation amount of each operation terminal so that it follows the operation amount reference value. Specifically, the operation amount adjustment unit 33 includes a combustion
燃焼用空気調整部331は、燃焼用空気の送風量および温度が、制御部31により補正された操作量基準値(以下、「補正操作量基準値」という)に追従するように操作量を調整する。また、空気量比率調整部332は、火格子下燃焼用空気ダンパ14a~14dのそれぞれを制御して、それぞれの風箱における流量の相互の比率を調整する。また、二次空気調整部333は、二次空気の風量および温度が、補正操作量基準値に追従するように操作量を調整する。ここで、燃焼用空気および二次空気の送風量は、燃焼用空気ダンパ14、火格子下燃焼用空気ダンパ14a~14dおよび二次空気ダンパ15のそれぞれの開度を制御することにより、調整される。
The combustion
廃棄物供給装置送り速度調整部334は、廃棄物供給装置送り速度が補正操作量基準値に追従するように操作量を調整する。また、火格子送り速度調整部335は、火格子送り速度が補正操作量基準値に追従するように操作量を調整する。操作量調整部33は、制御部31によって操作量基準値が補正されなかった場合には、補正されていない操作量基準値に基づいて、それぞれの操作量を調整する。
The waste feeder feed speed adjustment unit 334 adjusts the operation amount so that the waste feeder feed speed follows the corrected operation amount reference value. The grate feed
廃棄物情報予測装置40は、制御部(制御手段)41と、出力部42と、入力部43と、記憶部44と、を備えている。制御部41は、機能的および物理的には、上述した制御部31と同様の構成を有し、ハードウェアを有するCPU、DSP、FPGA等のプロセッサと、RAMやROM等の主記憶部(いずれも図示せず)と、を備えている。制御部41は、具体的には、特徴量算出部(特徴量算出手段)411と、学習部412と、廃棄物情報予測部413として機能する。
The waste
特徴量算出部411は、炉1内における廃棄物50の撮影画像情報から、当該廃棄物50の状態を特徴付ける特徴量を算出する。特徴量算出部411は、具体的には、撮像部26によって撮像された、時間的に連続する複数の撮影画像情報において、廃棄物50の動きを追跡し、後述する学習部412における学習の入力データとなる特徴量を算出する。すなわち、特徴量算出部411は、入力部43から入力される廃棄物50の撮影画像情報を複数のブロックに分割し、分割された複数のブロックの少なくとも一つを所定時間追跡して当該追跡ブロックの特徴量を算出する。
The feature calculation unit 411 calculates feature quantities characterizing the state of the
特徴量算出部411は、例えば火格子4に供給される前の廃棄物50、すなわち廃棄物供給部12付近(以下、「給じん口領域」ともいう)に位置する供給前廃棄物51を撮影して得られる撮影画像情報に基づいて、供給前廃棄物51の温度変化量を、特徴量として算出する。この「温度変化量」は、具体的には、後述するように、撮影画像情報の廃棄物供給部12付近に設定されたブロックあたりの平均温度上昇量である。
The feature calculation unit 411 calculates the temperature change amount of the
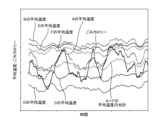
ここで、図5は、撮像部26によって撮像された炉1内の撮影画像情報の一例を示している。同図に示した撮影画像情報を、廃棄物供給部12付近(給じん口領域)の領域A、火格子4の奥側の領域B、火格子4の真ん中の領域C、火格子4の手前側の領域D、左の炉壁1aの領域E、右の炉壁1aの領域Fに区分し、各領域A~Fの平均温度の変化量を算出した。そして、各領域A~Fの平均温度の推移と、各領域A~Fの平均温度の合計の推移と、撮影画像情報に係る供給前廃棄物51のごみ燃焼後に測定されたカロリーの推移とをまとめたものが、図6のグラフである。
Here, FIG. 5 shows an example of photographed image information of the inside of the
図6に示すように、領域A~Fのうち、領域A、すなわち廃棄物供給部12付近の供給前廃棄物51の平均温度と、カロリーとが、他の領域よりも比較的高い相関を有していることが分かる。このような新たな知見に基づいて、特徴量算出部411では、供給前廃棄物51のカロリーと相関の高い、廃棄物供給部12付近の供給前廃棄物51の温度上昇量を、特徴量として算出する。
As shown in FIG. 6, among areas A to F, area A, i.e., area A near the
なお、特徴量算出部411は、後述するように、学習部412における廃棄物情報予測モデル44aの学習時(図12のステップS3参照)と、廃棄物情報予測部413における廃棄物情報の予測時(図13のステップS13参照)とのそれぞれにおいて、廃棄物50の特徴量を算出する。
As described below, the feature calculation unit 411 calculates the feature amount of the
以下、特徴量算出部411における特徴量の具体的な算出方法について、図7~図9を参照しながら説明する。特徴量算出部411は、同図に示すように、撮影画像情報を複数のブロックBlに分割し、分割された複数のブロックBlの少なくとも一つを、複数のフレームにわたって追跡(トラッキング)する。廃棄物50の動きを追跡する手法としては、例えばブロックマッチング法によるオプティカルフローを用いることができる。この手法では、画像を適当なサイズのブロックBlに分割し、画像フレーム間の差分を検出してブロックBlごとの移動先を探索する。
The specific method of calculating the features in the feature calculation unit 411 will be described below with reference to Figs. 7 to 9. As shown in Fig. 7, the feature calculation unit 411 divides the captured image information into a number of blocks Bl, and tracks at least one of the divided blocks Bl across a number of frames. As a method for tracking the movement of the
なお、分割するブロックは、取得した撮影画像情報全体を同一サイズのブロックに分割してもよいし、一部の領域のみを同一サイズのブロックに分割してもよい。また、撮影画像情報のブロックBl化と追跡は、例えば特定の廃棄物(例えば上述した燃焼前の供給前廃棄物51)を、他の廃棄物(燃焼している廃棄物等)と混同せずに精度よく、後述する廃棄物情報を算出するものであるが、そのブロックサイズは、小さすぎると処理に時間が掛かり、大きすぎるとブロックBlの追跡精度が低下する。そのため、例えば撮影画像情報の解像度等に基づいて、処理時間および追跡精度の最もよいブロックサイズを設定することが望ましい。
The blocks to be divided may be the same size for all of the captured image information, or only a portion of the image information may be divided into blocks of the same size. The block Bl division and tracking of the captured image information is intended to accurately calculate waste information (described below) without confusing a specific waste (such as the pre-combustion
特徴量算出部411は、例えば図7に示すように、撮影画像情報における廃棄物供給部12付近の領域に複数のブロックBlを配置する。これらのブロックBlは、図8に示すように、供給前廃棄物51の動きに合わせて移動する。また、撮影画像情報に設定された追跡範囲(同図では廃棄物供給部12付近の領域)から脱落した脱落ブロックについても削除し、追跡を終了する。また、フレーム間でブロックBlの画素値の差分が予め定めた閾値以下である場合、当該ブロックBlに含まれる供給前廃棄物51が火格子4に落下したと判定し、追跡を終了する。
The feature amount calculation unit 411 places multiple blocks Bl in the area near the
続いて、特徴量算出部411は、撮影画像情報を解析することにより、図10に示すように、追跡したブロックBl(追跡ブロック)について、所定時間での平均温度の変化量を算出する。続いて、正の平均温度変化量(つまり温度上昇している)のブロックBlの平均温度の総和を算出する。なお、正の平均温度変化量のブロックBlは、当該ブロックBlに含まれる供給前廃棄物51が今後燃焼しやすいということを意味している。
Next, the feature calculation unit 411 calculates the amount of change in average temperature over a specified time period for the tracked block Bl (tracked block) by analyzing the captured image information, as shown in FIG. 10. Next, the sum of the average temperatures of blocks Bl with a positive average temperature change (i.e., temperature is rising) is calculated. Note that a block Bl with a positive average temperature change means that the
続いて、特徴量算出部411は、正の平均温度変化量のブロックBlの平均温度の総和を、ブロックBlの総数で割ることにより、ブロックあたりの平均温度上昇量を、特徴量として算出する。このように、撮影画像情報の廃棄物供給部12付近の領域全体ではなく、予め設定したブロックBlごとに追跡した供給前廃棄物51の温度変化を見ることにより、供給前廃棄物51が移動してもその廃棄物自体の温度変化を正確に把握することが可能となる。
Then, the feature calculation unit 411 calculates the average temperature rise per block as a feature by dividing the sum of the average temperatures of the blocks Bl with the positive average temperature change by the total number of blocks Bl. In this way, by looking at the temperature change of the
ここで、特徴量算出部411は、上述したブロックBlごとの供給前廃棄物51の温度変化量の他に、ブロックBlごとの供給前廃棄物51の移動量を特徴量として算出してもよい。この場合、特徴量算出部411は、各ブロックBlの動きベクトルの平均・分散等の統計量を集計することにより算出する。なお、図11に示すように、ブロックBlの移動量が大きい場合、炉1内への廃棄物50の投入量が多いことを意味している。反対に、ブロックBlの移動量が小さい場合、炉1内への廃棄物50の投入量が少ないことを意味している。従って、ブロックBlごとの供給前廃棄物51の移動量を特徴量として算出することにより、炉1内への廃棄物50の投入量の多寡を把握することができる。
Here, in addition to the temperature change amount of the
なお、特徴量算出部411は、上述したブロックBlごとの供給前廃棄物51の温度変化量およびブロックBlごとの供給前廃棄物51の移動量の他に、撮影画像情報に設定される供給前廃棄物51の分割された複数のブロックBlの総数を特徴量として算出してもよい。また、撮影画像情報において予め設定された追跡範囲(例えば廃棄物供給部12付近の領域)から脱落した脱落ブロックの数は、これから燃焼するごみの量を表すため、これも特徴量として算出してもよい。
In addition to the temperature change amount of the
学習部412は、特徴量算出部411によって算出された特徴量、すなわち特徴量算出部411で追跡した各ブロックBlから取得できる特徴量を入力変数とし、廃棄物情報を出力変数として、過去の特徴量とそれに対する過去の廃棄物情報との関係を、廃棄物情報予測モデル44aに学習させる。そして、学習部412は、供給前廃棄物51の特徴量と当該供給前廃棄物51の廃棄物情報とを対応付けた関係モデルである廃棄物情報予測モデル(学習済み廃棄物情報予測モデル)44aを、記憶部44に格納する。
The
廃棄物情報予測モデル44aの学習方法は特に限定されないが、例えばRNN(Recurrent Neural Network)、LSTM(Long Short Term Memory)、逐次線形予測等の、時系列データの学習に適した機械学習手法を用いることができる。
The learning method of the waste
また、廃棄物情報予測モデル44aは、特に学習済モデルには限定されない。すなわち、これから廃棄物情報を予測し制御する焼却炉における過去の供給前廃棄物51の特徴量を入力値とし、当該供給前廃棄物51の廃棄物情報を出力値として、それらの対応付けを示すLUT(ルックアップテーブル)または所定の関数であってもよい。そして予測する際には、入力される供給前廃棄物51の特徴量をこれらのLUTや所定の関数を用いて適宜近似や補間等を行って廃棄物情報を算出するものであってもよい。
The waste
ここで、廃棄物情報予測モデル44aが学習する「特徴量」には、上述したように、ブロックBlごとの廃棄物50の温度変化量、ブロックBlごとの廃棄物50の移動量、撮影画像情報に設定されるブロックBlの総数、撮影画像情報において予め設定された追跡範囲(例えば廃棄物供給部12付近の領域)から脱落した脱落ブロックの数のうち、少なくとも一つが含まれる。
Here, the "feature quantities" learned by the waste
また、廃棄物情報予測モデル44aが学習する「廃棄物情報」には、廃棄物50の質が含まれる。また、この「質」には、廃棄物50の燃焼時に発生するカロリー(発熱量)、廃棄物50の燃焼時にボイラ9から発生する水蒸気量のうち、少なくとも一つが含まれる。
The "waste information" learned by the waste
廃棄物情報予測部413は、廃棄物情報予測モデル44aに対して、炉1内の撮影画像情報から特徴量算出部411によって算出された特徴量を入力することにより、廃棄物情報を予測する。廃棄物情報予測部413は、例えば、廃棄物情報予測モデル44aに対して、廃棄物供給部12付近のブロックBlごとの供給前廃棄物51の温度上昇量を入力データとして入力することにより、当該供給前廃棄物51の質(カロリー、水蒸気量)の予測値を出力として得る。
The waste
出力部42は、所定の情報を外部に出力する。出力部42は、制御部41による制御に従って、ディスプレイモニタに炉1内の廃棄物50の画像、廃棄物情報(例えば質の予測結果)等を表示したり、タッチパネルディスプレイの画面上に文字や図形等を表示したり、スピーカから音声を出力したりする。出力部42は、具体的には、廃棄物情報予測部413で予測された供給前廃棄物51の廃棄物情報を出力する。
The output unit 42 outputs predetermined information to the outside. In accordance with the control of the
入力部43は、キーボード、入力用のボタン、レバー、液晶等のディスプレイに重畳して設けられる手入力のためのタッチパネル、音声認識のためのマイクロホン等の、ユーザインターフェースを用いて構成される。ユーザ等が入力部43を操作することによって、制御部41に所定の情報が入力される。なお、出力部42および入力部43を一体とした入出力部とし、入出力部をタッチパネルディスプレイやスピーカマイクロホン等から構成してもよい。入力部43は、具体的には、外部で撮影された廃棄物50の撮影画像情報を入力可能に構成されている。
The
記憶部44は、機能的および物理的には、上述した記憶部32と同様の構成を有し、RAM等の揮発性メモリ、ROM等の不揮発性メモリ、EPROM、HDD、およびリムーバブルメディア等の記憶媒体により構成される。
The
記憶部44には、廃棄物情報予測装置40の動作を実行するためのOS、各種プログラム、各種テーブル、各種データベース等が記憶可能である。ここで、各種プログラムには、本実施形態による学習モデルまたは学習済みモデルを用いた制御を実現する情報処理プログラムが含まれる。記憶部44は、種々のネットワークを介して通信可能な他のサーバに設けてもよいし、燃焼制御装置30に設けてもよい。記憶部44には、具体的には、廃棄物情報予測モデル44aが格納されている。
The
廃棄物情報予測モデル44aは、学習部412によって学習が施されたモデルであり、撮影画像情報の各ブロックBlから取得された特徴量(例えば供給前廃棄物51の温度上昇量)から、廃棄物情報(例えば供給前廃棄物51の質)を予測するモデルである。また、廃棄物情報予測モデル44aは、供給前廃棄物51を撮影した撮影画像情報に設定された複数のブロックBlを追跡した追跡ブロックから算出した特徴量が入力された際に、廃棄物情報を出力するように学習されている。
The waste
廃棄物情報予測モデル44aは、例えば人工知能ソフトウエアの一部であるプログラムモジュールとしての利用が想定されており、CPUおよび記憶装置を備えるコンピュータ(廃棄物情報予測装置40)において用いられる。また、廃棄物情報予測モデル44aは、CD、DVD、フラッシュメモリ、磁気テープ等の記録媒体に記録し、読み取り可能としてもよい。
The waste
(廃棄物情報予測モデルの学習方法)
本発明の実施形態に係る廃棄物情報予測モデルの学習方法について、図12を参照しながら説明する。廃棄物情報予測モデルの学習方法では、画像取得工程と、特徴量算出工程と、学習工程と、を行う。
(Learning method for waste information prediction model)
A learning method for a waste information prediction model according to an embodiment of the present invention will be described with reference to Fig. 12. The learning method for a waste information prediction model includes an image acquisition step, a feature amount calculation step, and a learning step.
まず、画像取得工程において、撮像部26は、焼却炉の炉1内の廃棄物50を撮像し、撮影画像情報を取得する(ステップS1)。続いて、特徴量算出工程において、特徴量算出部411は、ステップS1で取得した撮影画像情報を、複数のブロックBlに分割する(ステップS2)。続いて、特徴量算出部411は、廃棄物50の動きをブロックBlごとに追跡し、各ブロックBlに含まれる廃棄物50を特徴付ける特徴量(例えば供給前廃棄物51の温度上昇量)を算出する(ステップS3)。続いて、学習工程において、学習部412は、ステップS3で算出した特徴量と、廃棄物情報(例えば供給前廃棄物51の質)との関係を、廃棄物情報予測モデル44aに学習させ(ステップS4)、本フローを完了する。
First, in the image acquisition process, the
(廃棄物情報予測方法)
本発明の実施形態に係る廃棄物情報予測方法について、図13を参照しながら説明する。廃棄物情報予測方法では、画像取得工程と、特徴量算出工程と、廃棄物情報予測工程と、を行う。
(Waste information forecast method)
A waste information prediction method according to an embodiment of the present invention will be described with reference to Fig. 13. The waste information prediction method includes an image acquisition step, a feature amount calculation step, and a waste information prediction step.
まず、画像取得工程において、撮像部26は、焼却炉の炉1内の廃棄物50を撮像し、撮影画像情報を取得する(ステップS11)。続いて、特徴量算出工程において、特徴量算出部411は、ステップS11で取得した撮影画像情報を、複数のブロックBlに分割する(ステップS12)。続いて、特徴量算出部411は、廃棄物50の動きをブロックBlごとに追跡し、各ブロックBlに含まれる廃棄物50を特徴付ける特徴量(例えば供給前廃棄物51の温度上昇量)を算出する(ステップS13)。続いて、廃棄物情報予測工程において、廃棄物情報予測部413は、ステップS13で算出した特徴量を、廃棄物情報予測モデル44aに対して入力することにより、廃棄物情報(例えば供給前廃棄物51の質)を予測し(ステップS14)、本フローを完了する。
First, in the image acquisition process, the
以上説明した実施形態に係る廃棄物情報予測装置、焼却炉の燃焼制御装置、廃棄物情報予測方法、廃棄物情報予測モデルの学習方法および廃棄物情報予測モデルプログラムによれば、炉1内の廃棄物50の動きを予め設定した複数のブロックBlごとに追跡し、各ブロックBlの特徴量を廃棄物情報予測モデル44aに学習させることにより、炉1内の廃棄物情報を精度よく予測することができ、予測した廃棄物情報に基づいて、焼却炉等の廃棄物処理プラントを効率よく制御することが可能となる。
According to the waste information prediction device, incinerator combustion control device, waste information prediction method, waste information prediction model learning method, and waste information prediction model program of the embodiments described above, the movement of
すなわち、実施形態に係る廃棄物情報予測装置、焼却炉の燃焼制御装置、廃棄物情報予測方法、廃棄物情報予測モデルの学習方法および廃棄物情報予測モデルプログラムによれば、撮影画像情報から詳細な廃棄物50の動きを追跡し、注目した廃棄物50の温度上昇の経時変化を捉えることにより、廃棄物50の質(例えばカロリー、水蒸気量)と高い相関を持つ特徴量を抽出する。そして、その特徴量を入力データとした学習および予測を行い、その予測結果を廃棄物処理プラントの制御に利用することにより、廃棄物処理プラントの制御の高精度化および高効率化を図ることができる。
In other words, according to the waste information prediction device, incinerator combustion control device, waste information prediction method, waste information prediction model learning method, and waste information prediction model program of the embodiments, the movement of
例えば供給前廃棄物51の温度上昇量が小さい(温度上昇速度が遅い)場合、供給前廃棄物51に含まれる水分が多く、カロリーが低いことが推定される。一方、供給前廃棄物51の温度上昇量が大きい(温度上昇速度が速い)場合、供給前廃棄物51に含まれる水分が少なく、カロリーが高いことが推定される。このように、実施形態に係る廃棄物情報予測装置、廃棄物情報予測方法および廃棄物情報予測モデルの学習方法では、供給前廃棄物51の温度上昇量と質との関係を、予め廃棄物情報予測モデル44aに学習させることにより、供給前廃棄物51の質を高精度に予測することができる。
For example, if the amount of temperature rise of the
また、実施形態に係る焼却炉の燃焼制御装置および焼却炉の燃焼制御方法では、例えば予測したカロリーが高い場合は、火格子4に載せる廃棄物50の量(すなわち廃棄物供給装置送り速度)を少なくする制御を行い、予測したカロリーが低い場合は、火格子4に載せる廃棄物50の量を多くする制御を行う。これにより、廃棄物50の燃焼の安定化を図り、ボイラ9から発生する水蒸気量や発電量の安定化を実現することができる。
In addition, in the incinerator combustion control device and incinerator combustion control method according to the embodiment, for example, when the predicted calorie is high, control is performed to reduce the amount of
更なる効果や変形例は、当業者によって容易に導き出すことができる。本開示のより広範な態様は、以上のように表しかつ記述した特定の詳細および代表的な実施形態に限定されるものではない。従って、添付のクレームおよびその均等物によって定義される総括的な発明の概念の精神または範囲から逸脱することなく、様々な変更が可能である。 Further advantages and modifications may be readily derived by those skilled in the art. The broader aspects of the present disclosure are not limited to the specific details and representative embodiments shown and described above. Thus, various modifications may be made without departing from the spirit or scope of the general inventive concept as defined by the appended claims and equivalents thereof.
1 炉
1a 炉壁
2 廃棄物投入口
3 廃棄物供給装置
4 火格子
5 灰落下口
6 燃焼用空気ブロア
7 炉出口
8 煙突
9 ボイラ
9a 熱交換器
9b 蒸気ドラム
10 二次空気吹き込み口
11 二次空気ブロア
12 廃棄物供給部
13 段差壁
14 燃焼用空気ダンパ
14a,14b,14c,14d 火格子下燃焼用空気ダンパ
15 二次空気ダンパ
16 中間天井
17 燃焼室ガス温度計
18 主煙道ガス温度計
19 炉出口下部ガス温度計
20 炉出口中部ガス温度計
21 炉出口ガス温度計
22 ボイラ出口酸素濃度計
23 ガス濃度計
24 排ガス流量計
25 蒸気流量計
26 撮像部
30 燃焼制御装置
31 制御部
32 記憶部
33 操作量調整部
331 燃焼用空気調整部
332 空気量比率調整部
333 二次空気調整部
334 廃棄物供給装置送り速度調整部
335 火格子送り速度調整部
40 廃棄物情報予測装置
41 制御部
411 特徴量算出部
412 学習部
413 廃棄物情報予測部
42 出力部
43 入力部
44 記憶部
44a 廃棄物情報予測モデル
50 廃棄物
51 供給前廃棄物
52 火格子上廃棄物
REFERENCE SIGNS
Claims (17)
外部で撮影された前記廃棄物の撮影画像情報を入力可能な入力部と、
前記入力部から入力される前記廃棄物の前記撮影画像情報を複数のブロックに分割し、分割された前記複数のブロックの少なくとも一つを所定時間追跡して当該追跡ブロックの特徴量を算出する特徴量算出手段と、
前記廃棄物の特徴量と前記廃棄物に関する情報とを対応付けた関係モデルを記憶した記憶部と、
制御手段と、
を有し、
前記制御手段は、前記入力部から入力される、前記焼却炉内の前記廃棄物を撮影して得た撮影画像情報から、前記特徴量算出手段により前記廃棄物の特徴量を算出し、前記記憶部に記憶される前記関係モデルに基づき前記廃棄物に関する情報を予測することを特徴とする廃棄物情報予測装置。 A waste information prediction device that predicts information about waste in an incinerator,
An input unit capable of inputting photographed image information of the waste photographed outside;
a feature amount calculation means for dividing the photographed image information of the waste material input from the input unit into a plurality of blocks, tracking at least one of the divided blocks for a predetermined period of time, and calculating a feature amount of the tracking block;
a storage unit that stores a relational model that associates the feature quantities of the waste with information about the waste;
A control means;
having
The control means calculates features of the waste from image information obtained by photographing the waste inside the incinerator and inputted from the input unit using the feature calculation means, and predicts information about the waste based on the relational model stored in the memory unit. This is a waste information prediction device characterized by the above.
前記燃焼制御部は、
請求項4から請求項7のいずれか一項に記載の廃棄物情報予測装置から出力された廃棄物に関する情報に基づいて、前記焼却炉における燃焼を制御することを特徴とする焼却炉の燃焼制御装置。 A combustion control device including a combustion control unit that controls an incinerator that burns waste,
The combustion control unit is
A combustion control device for an incinerator, comprising: a control device for controlling combustion in the incinerator based on information about waste output from the waste information prediction device according to any one of claims 4 to 7.
前記燃焼制御部は、前記廃棄物に関する情報に基づいて、前記火格子上における前記廃棄物の移動速度、前記廃棄物供給装置による前記廃棄物の供給速度、前記送風機による空気の送風量、前記送風機による空気の温度のうち、少なくとも一つを制御することを特徴とする請求項8に記載の焼却炉の燃焼制御装置。 The incinerator includes a grate for moving the waste, a waste supply device for supplying the waste onto the grate, and a blower for blowing air into the incinerator;
The combustion control device for an incinerator as described in claim 8, characterized in that the combustion control unit controls at least one of the following based on information about the waste: the movement speed of the waste on the grate, the supply speed of the waste by the waste supply device, the amount of air blown by the blower, and the temperature of the air by the blower.
焼却炉内に投入される廃棄物の撮影画像情報を取得する画像取得工程と、
前記画像取得工程で取得された前記廃棄物の撮影画像情報を複数のブロックに分割し、分割された前記複数のブロックの少なくとも一つを追跡して当該追跡ブロックの特徴量を算出する特徴量算出工程と、
前記特徴量算出工程で算出された前記廃棄物の特徴量から、前記廃棄物に関する情報を予測する廃棄物情報予測工程と、
を有することを特徴とする廃棄物情報予測方法。 A waste information prediction method for predicting information about waste in an incinerator, comprising:
An image acquisition step of acquiring photographed image information of waste put into the incinerator;
a feature amount calculation step of dividing the photographed image information of the waste obtained in the image acquisition step into a plurality of blocks, tracking at least one of the divided plurality of blocks, and calculating a feature amount of the tracking block;
a waste information prediction step of predicting information about the waste from the feature amounts of the waste calculated in the feature amount calculation step;
A waste information prediction method comprising the steps of:
廃棄物を焼却する焼却炉内の廃棄物の撮影画像情報を複数のブロックに分割し、分割された前記複数のブロックの少なくとも一つを追跡し、
当該追跡ブロックから算出した特徴量を入力値とし、前記廃棄物に関する情報を出力値として、過去の前記特徴量とそれに対する過去の前記廃棄物に関する情報との関係を、前記廃棄物情報予測モデルに学習させることを特徴とする廃棄物情報予測モデルの学習方法。 A method for learning a waste information prediction model that predicts information about waste in an incinerator, comprising:
Dividing photographed image information of waste in an incinerator for incinerating the waste into a plurality of blocks, and tracking at least one of the plurality of divided blocks;
A learning method for a waste information prediction model, characterized in that the feature values calculated from the tracking block are used as input values, information about the waste is used as output values, and the waste information prediction model is made to learn the relationship between the past feature values and the corresponding past information about the waste.
前記廃棄物を撮影した撮影画像情報に設定された複数のブロックを追跡した追跡ブロックから算出した特徴量が入力された際に、前記廃棄物に関する情報を出力するように学習されたことを特徴とする廃棄物情報予測モデルプログラム。 A waste information prediction model program that can be recorded on a recording medium and predicts information about waste in an incinerator,
A waste information prediction model program that is trained to output information about the waste when a feature calculated from a tracking block that tracks multiple blocks set in the captured image information of the waste is input.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021065637A JP7501432B2 (en) | 2021-04-08 | 2021-04-08 | Waste information prediction device, incinerator combustion control device, waste information prediction method, waste information prediction model learning method, and waste information prediction model program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021065637A JP7501432B2 (en) | 2021-04-08 | 2021-04-08 | Waste information prediction device, incinerator combustion control device, waste information prediction method, waste information prediction model learning method, and waste information prediction model program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022161090A JP2022161090A (en) | 2022-10-21 |
| JP7501432B2 true JP7501432B2 (en) | 2024-06-18 |
Family
ID=83658718
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021065637A Active JP7501432B2 (en) | 2021-04-08 | 2021-04-08 | Waste information prediction device, incinerator combustion control device, waste information prediction method, waste information prediction model learning method, and waste information prediction model program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7501432B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118243557B (en) * | 2024-05-21 | 2024-07-30 | 交通运输部公路科学研究所 | Road waste recyclability assessment method and system based on deep learning |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011027349A (en) | 2009-07-27 | 2011-02-10 | Takuma Co Ltd | Treatment system and treatment method for combustion target supplied to combustion furnace and combustion control system for the combustion furnace using the treatment system and the treatment method |
| JP2019027696A (en) | 2017-07-31 | 2019-02-21 | 荏原環境プラント株式会社 | Apparatus, system, program, method, and data structure for estimating waste quality |
| JP2020128837A (en) | 2019-02-08 | 2020-08-27 | Jfeエンジニアリング株式会社 | Waste supply amount measurement device and method and waste incineration device and method |
| JP2020186838A (en) | 2019-05-13 | 2020-11-19 | Jfeエンジニアリング株式会社 | Waste incinerator, and control method of refuse feeding device of waste incinerator |
-
2021
- 2021-04-08 JP JP2021065637A patent/JP7501432B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011027349A (en) | 2009-07-27 | 2011-02-10 | Takuma Co Ltd | Treatment system and treatment method for combustion target supplied to combustion furnace and combustion control system for the combustion furnace using the treatment system and the treatment method |
| JP2019027696A (en) | 2017-07-31 | 2019-02-21 | 荏原環境プラント株式会社 | Apparatus, system, program, method, and data structure for estimating waste quality |
| JP2020128837A (en) | 2019-02-08 | 2020-08-27 | Jfeエンジニアリング株式会社 | Waste supply amount measurement device and method and waste incineration device and method |
| JP2020186838A (en) | 2019-05-13 | 2020-11-19 | Jfeエンジニアリング株式会社 | Waste incinerator, and control method of refuse feeding device of waste incinerator |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022161090A (en) | 2022-10-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7443683B2 (en) | Automatic combustion control method and monitoring center | |
| JP7548109B2 (en) | Waste quality prediction device, incinerator combustion control device, waste quality prediction method, waste quality prediction model learning method, and waste quality prediction model program | |
| TWI850785B (en) | Control device | |
| JP7354930B2 (en) | Information processing device, information processing method, combustion control device, and combustion control method | |
| JP6543390B1 (en) | Furnace internal condition judging method and evaporation control method | |
| TWI819707B (en) | Control device for incinerator equipment | |
| JP7501432B2 (en) | Waste information prediction device, incinerator combustion control device, waste information prediction method, waste information prediction model learning method, and waste information prediction model program | |
| WO2019235377A1 (en) | Method for estimating state quantity of combustion facility, combustion control method, and combustion control device | |
| JP7700739B2 (en) | Information processing device, information processing method, and program | |
| JP2008249214A (en) | Control method, device and program for incinerator | |
| JP7354924B2 (en) | Information processing device, information processing method, waste supply rate measuring device and measuring method, burn-out point position measuring device and measuring method, combustion control device and combustion control method | |
| JP7428080B2 (en) | Information processing device, information processing method, combustion control device, and combustion control method | |
| JP7456312B2 (en) | Information processing device, information processing method, program, drug supply device, exhaust gas treatment device, and exhaust gas treatment method | |
| JP2022034250A (en) | Estimation system and control system | |
| JP3688644B2 (en) | Method for estimating in-furnace waste retention distribution in incinerator and combustion control method and apparatus using the method | |
| JP2021173496A (en) | Waste supply abnormality detection method, waste supply control method, waste supply abnormality detection device and waste supply control device | |
| JP2023005444A (en) | Controller of incinerator facility | |
| JP7516963B2 (en) | Information processing device and information processing method | |
| WO2024247371A1 (en) | System for combustion equipment and combustion control method | |
| JP2025072138A (en) | Information processing device, information processing method, and program | |
| JP2025071882A (en) | Information processing device, information processing method, and program | |
| JP7794113B2 (en) | Management device, management method, and program | |
| JP4486628B2 (en) | Incinerator control method and apparatus, and program | |
| JP2004316960A (en) | Automatic combustion control method and apparatus for refuse incineration plant | |
| TWI912144B (en) | White smoke detection devices, white smoke detection methods, and their computer program products |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230816 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240327 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240520 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7501432 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |