JP7512560B2 - 回転アクチュエータおよびロボット - Google Patents
回転アクチュエータおよびロボット Download PDFInfo
- Publication number
- JP7512560B2 JP7512560B2 JP2020023504A JP2020023504A JP7512560B2 JP 7512560 B2 JP7512560 B2 JP 7512560B2 JP 2020023504 A JP2020023504 A JP 2020023504A JP 2020023504 A JP2020023504 A JP 2020023504A JP 7512560 B2 JP7512560 B2 JP 7512560B2
- Authority
- JP
- Japan
- Prior art keywords
- electric motor
- rotary actuator
- rotation
- housing
- sleeve
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Landscapes
- Manipulator (AREA)
- Retarders (AREA)
- Braking Arrangements (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Description
図1は、本発明の第1実施形態に係るロボット10の斜視図である。ロボット10は、産業用の多関節ロボットである。ロボット10は、工業製品を製造するための組立ラインまたは製造ラインに設置され得る。本例では、ロボット10は、6個の関節部12と、2本のアーム14とを備える。以下の説明では、6個の関節部12のそれぞれを区別するため、6個の関節部12それぞれを「第1関節部12A」、「第2関節部12B」、「第3関節部12C」、「第4関節部12D」、「第5関節部12E」および「第6関節部12F」などと称する場合がある。また、以下では、2本のアーム14のそれぞれを区別するため、2本のアーム14それぞれを「第1アーム14A」および「第2アーム14B」などと称する場合がある。
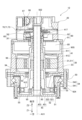
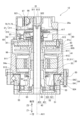
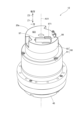
次に、第2実施形態について、図3及び図4を参照しつつ説明する。なお、以下の説明において、既に説明した要素と同様の機能を有する要素については、同符号またはアルファベット文字を追加した符号を付して、詳細な説明を省略する場合がある。図3は、本発明の第2実施形態に係る関節部12の断面図である。図4は、本発明の第2実施形態に係る関節部12の斜視図である。
第2実施形態の関節部12は、回転アクチュエータ20aを有する。回転アクチュエータ20aのハウジング90は、図2に示す第1収容部91の代わりに、第1収容部91aを有する。第1収容部91aは、筒状部911と、軸受保持部94a(ベアリングホルダ部)とを有する。筒状部911は、第1収容部91aにおける電動モータ30を囲う部分である。また、軸受保持部94aは、筒状部911の軸方向一方側の端部913に連続する部分である。
図3に示すように、回転アクチュエータ20aは、コネクタ付電線21と、中継コネクタ23と、接続ピン25を備える。コネクタ付電線21と、中継コネクタ23と、接続ピン25とは、回転検出器60からの検出信号を回路基板70に出力する部材である。
回転アクチュエータ20は、廻止構造81を有する。廻止構造81は、廻止溝811(廻止凹部)と、係合凸部813とを含む。
図3に示すように、電動モータ30は、電磁ブレーキ80よりも軸方向一方側に位置する。ハウジング90の第1収容部91aは、筒状部911(第1筒状部)とともに、ブレーキホルダ部915を有する。筒状部911は、電動モータ30及び電磁ブレーキ80を囲む。ブレーキホルダ部915は、電磁ブレーキ80よりも軸方向他方側において、第1収容部91aから径方向内側に延びる。すなわち、ブレーキホルダ部915は、電磁ブレーキ80よりも軸方向他方側に位置する。
図4に示すように、電池ホルダ97は、第2収容部92の外表面に設けられている。より具体的には、電池ホルダ97は、第2収容部92における軸方向他方側の端面921に設けられている。電池ホルダ97は、端面921において、軸方向一方側に凹む凹状である。
以上、実施形態について説明してきたが、本発明は上記のようなものに限定されるものではなく、様々な変形が可能である。
12 関節部
14A 第1アーム
14B 第2アーム
20,20a 回転アクチュエータ
30 電動モータ
31 ロータ
33 ステータ
41 入力部材
411 中空回転軸
413 入力軸
45 出力部材
50 減速機
51 剛性内歯歯車
52 可撓性外歯歯車
60 回転検出器
70 回路基板
71 ドライバ回路
73 記憶部
8 減速機
80 電磁ブレーキ
811 廻止溝811(廻止凹部)
813 係合凸部813
83 ボルト(固定部)
90 ハウジング
90S 中空部
91,91a 第1収容部
911 筒状部
915 ブレーキホルダ部
92 第2収容部
96 スリーブ
97 電池ホルダ
971 爪部
98 電池
AX1 中心軸線
Claims (16)
- 回転アクチュエータであって、
ロータおよびステータを有する電動モータと、
前記ロータに連結され、中心軸線を中心として回転する入力部材と、
前記電動モータの軸方向一方側に配置され、前記中心軸線を中心として回転する出力部材と、
前記入力部材の回転を減速して前記出力部材に伝達する減速機と、
前記電動モータの軸方向他方側に配置され、前記電動モータを制御するドライバ回路を有する回路基板と、
前記電動モータと前記回路基板との間に配置され、前記入力部材の回転を検出して、その回転に応じた検出信号を前記ドライバ回路に出力する回転検出器と、
前記入力部材の回転を停止させる電磁ブレーキと、
前記電動モータ、前記回転検出器、前記回路基板および前記電磁ブレーキを収容する中空部を内側に有するとともに、前記減速機が連結されるハウジングと、
前記中心軸線上に配置される中空のスリーブと、
を備え、
前記入力部材は、
前記中心軸線に沿って中空の筒状の空間を有する中空回転軸と入力軸と、を含み、
前記中空回転軸と前記入力軸は互いに連結され、
前記中空回転軸が、前記ロータを保持し、
前記入力軸が、前記減速機に接続され、
前記スリーブは、
前記中空回転軸と前記入力軸の内側に配置され、
前記スリーブの軸方向他方側の端部は、前記ハウジングに保持され、
前記スリーブの軸方向一方側の端部は、前記出力部材に固定されない状態で保持され、
前記ハウジングは、
前記電動モータおよび前記電磁ブレーキを収容する第1収容部と、
前記回転検出器および前記回路基板を収容し、前記第1収容部に対して軸方向他方側に連結される第2収容部と、を有し、
前記第1収容部が前記減速機に対して軸方向他方側に配置される、
回転アクチュエータ。 - 請求項1の回転アクチュエータであって、
前記電磁ブレーキが、前記電動モータと前記回転検出器との間に配置される、回転アクチュエータ。 - 請求項1または請求項2の回転アクチュエータであって、
前記ドライバ回路は、前記回転検出器から出力される信号に基づいて、前記入力部材の回転位置を記憶する記憶部を有する、回転アクチュエータ。 - 請求項3の回転アクチュエータであって、
前記ドライバ回路に電力を供給する電池を装着する電池ホルダ、
をさらに備える、回転アクチュエータ。 - 請求項4の回転アクチュエータであって、
前記電池ホルダは、前記ハウジングの外表面に設けられている、回転アクチュエータ。 - 請求項5の回転アクチュエータであって、
前記電池ホルダは、前記ハウジングの軸方向他方側の端面に設けられている、回転アクチュエータ。 - 請求項4から請求項6の回転アクチュエータであって、
前記電池ホルダは、電池を挟持する爪部を有する、回転アクチュエータ。 - 請求項1から請求項7いずれか1項の回転アクチュエータであって、
前記電磁ブレーキが、無励磁作動形ブレーキである、回転アクチュエータ。 - 請求項1から請求項8のいずれか1項の回転アクチュエータであって、
前記第1収容部の剛性が、前記第2収容部の剛性よりも高い、回転アクチュエータ。 - 請求項1から請求項9のいずれか1項の回転アクチュエータであって、
前記入力部材を、前記ハウジングに対して、前記中心軸線を中心として回転可能に保持するベアリング、
をさらに備え、
前記ハウジングは、
前記電動モータを囲う筒状部と、
前記筒状部の軸方向一方側の端部に連続する部分であって、前記筒状部から径方向内側へ延びるとともに、先端部に前記ベアリングが取り付けられるベアリングホルダ部と、
を有する、回転アクチュエータ。 - 回転アクチュエータであって、
ロータおよびステータを有する電動モータと、
前記ロータに連結され、中心軸線を中心として回転する入力部材と、
前記電動モータの軸方向一方側に配置され、前記中心軸線を中心として回転する出力部材と、
前記入力部材の回転を減速して前記出力部材に伝達する減速機と、
前記電動モータの軸方向他方側に配置され、前記電動モータを制御するドライバ回路を有する回路基板と、
前記電動モータと前記回路基板との間に配置され、前記入力部材の回転を検出して、その回転に応じた検出信号を前記ドライバ回路に出力する回転検出器と、
前記入力部材の回転を停止させる電磁ブレーキと、
前記電動モータ、前記回転検出器、前記回路基板および前記電磁ブレーキを収容する中空部を内側に有するとともに、前記減速機が連結されるハウジングと、
前記中心軸線上に配置される中空のスリーブと、
を備え、
前記入力部材は、前記中心軸線に沿って空間を有する中空回転軸、を含み、
前記スリーブが、前記中空回転軸の内側に配置され、
前記スリーブの軸方向他方側の端部は、前記ハウジングに保持され、
前記スリーブの軸方向一方側の端部は、前記出力部材に固定されない状態で保持され、
前記ハウジング及び前記スリーブのうち一方に設けられる廻止凹部と、 前記ハウジング及び前記スリーブのうち他方に設けられ、前記廻止凹部に係合して前記スリーブの中心軸線を中心とする回転を抑制する係合凸部と、をさらに備える、回転アクチュエータ。 - 請求項11の回転アクチュエータであって、 スリーブの軸方向の先端部に、前記廻止凹部または前記係合凸部が設けられる、回転アクチュエータ。
- 回転アクチュエータであって、
ロータおよびステータを有する電動モータと、
前記ロータに連結され、中心軸線を中心として回転する入力部材と、
前記電動モータの軸方向一方側に配置され、前記中心軸線を中心として回転する出力部材と、
前記入力部材の回転を減速して前記出力部材に伝達する減速機と、
前記電動モータの軸方向他方側に配置され、前記電動モータを制御するドライバ回路を有する回路基板と、
前記電動モータと前記回路基板との間に配置され、前記入力部材の回転を検出して、その回転に応じた検出信号を前記ドライバ回路に出力する回転検出器と、
前記入力部材の回転を停止させる電磁ブレーキと、
前記電動モータ、前記回転検出器、前記回路基板および前記電磁ブレーキを収容する中空部を内側に有するとともに、前記減速機が連結されるハウジングと、
前記中心軸線上に配置される中空のスリーブと、
を備え、
前記入力部材は、前記中心軸線に沿って空間を有する中空回転軸、を含み、
前記スリーブが、前記中空回転軸の内側に配置され、
前記スリーブの軸方向他方側の端部は、前記ハウジングに保持され、
前記スリーブの軸方向一方側の端部は、前記出力部材に固定されない状態で保持され、
前記ドライバ回路と電気的に接続される電線、及び、前記電線の先端に設けられているドライバ側コネクタを有するコネクタ付電線と、 前記回転検出器と電気的に接続される接点を有し、前記ドライバ側コネクタが軸方向に接続される中継コネクタと、を有する、回転アクチュエータ。 - 請求項1から請求項13のいずれか1項の回転アクチュエータであって、
前記電磁ブレーキを、前記電動モータとは反対側の位置で前記ハウジングに固定する固定部、
をさらに備える、回転アクチュエータ。 - 請求項14の回転アクチュエータであって、
前記電動モータは前記電磁ブレーキよりも軸方向一方側に位置し、
前記ハウジングは、
前記電動モータ及び前記電磁ブレーキを囲む筒状の第1筒状部と、
前記電磁ブレーキよりも軸方向他方側において、前記第1筒状部から径方向内側へ延びるブレーキホルダ部と、
を有し、
前記固定部は、前記電磁ブレーキを前記ブレーキホルダ部に固定する、回転アクチュエータ。 - 関節を有するロボットであって、
第1アームおよび第2アームと、
前記第1アームおよび前記第2アームを連結する関節部と、
を備え、
前記関節部が、請求項1から請求項15のいずれか1項の回転アクチュエータを含む、ロボット。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019111216 | 2019-06-14 | ||
| JP2019111216 | 2019-06-14 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020205742A JP2020205742A (ja) | 2020-12-24 |
| JP7512560B2 true JP7512560B2 (ja) | 2024-07-09 |
Family
ID=73837614
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020023504A Active JP7512560B2 (ja) | 2019-06-14 | 2020-02-14 | 回転アクチュエータおよびロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7512560B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20240380275A1 (en) * | 2021-08-26 | 2024-11-14 | Fanuc Corporation | Actuator and machine |
| KR20240023639A (ko) | 2021-08-31 | 2024-02-22 | 가부시키가이샤 하모닉 드라이브 시스템즈 | 파동기어장치 |
| JP7643276B2 (ja) * | 2021-09-28 | 2025-03-11 | セイコーエプソン株式会社 | 駆動ユニット、及びロボット |
| CN115135468B (zh) * | 2021-12-30 | 2024-03-19 | 深圳市越疆科技股份有限公司 | 用于机械臂关节的制动装置、机械臂关节及机械臂 |
| CN218659159U (zh) * | 2022-09-16 | 2023-03-21 | 深圳市零差云控科技有限公司 | 摩擦式制动器的关节模组及关节机器人 |
| JP2024073244A (ja) * | 2022-11-17 | 2024-05-29 | 日本精工株式会社 | 駆動装置 |
| CN116619437B (zh) * | 2023-05-31 | 2025-09-12 | 深圳市大族机器人有限公司 | 机器人关节模组和机器人 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004336879A (ja) | 2003-05-07 | 2004-11-25 | Tamagawa Seiki Co Ltd | 駆動回路内蔵型サーボモータ |
| JP2007288870A (ja) | 2006-04-13 | 2007-11-01 | Yaskawa Electric Corp | 中空アクチュエータ |
| JP2007319013A (ja) | 2006-05-30 | 2007-12-13 | Daiwa Seiko Inc | 魚釣用リールのハンドル取り付け構造 |
| JP2008115896A (ja) | 2006-11-01 | 2008-05-22 | Harmonic Drive Syst Ind Co Ltd | 波動歯車減速機を備えたアクチュエータ |
| JP2011065941A (ja) | 2009-09-18 | 2011-03-31 | Denso Wave Inc | ロボット用電池格納機構 |
| JP2016111740A (ja) | 2014-12-02 | 2016-06-20 | 株式会社ミツバ | 中空モータ |
| JP2017177275A (ja) | 2016-03-30 | 2017-10-05 | 日本電産サンキョー株式会社 | ロボット |
| JP2018144135A (ja) | 2017-03-02 | 2018-09-20 | 住友重機械工業株式会社 | モータ付きの駆動装置 |
| JP2018157613A (ja) | 2017-03-15 | 2018-10-04 | 日本電産サンキョー株式会社 | モータ |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2542076B2 (ja) * | 1989-03-14 | 1996-10-09 | 三菱電機株式会社 | 産業用ロボット |
| JPH08168209A (ja) * | 1994-12-13 | 1996-06-25 | Hitachi Ltd | 回転検出器付き電動機 |
-
2020
- 2020-02-14 JP JP2020023504A patent/JP7512560B2/ja active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004336879A (ja) | 2003-05-07 | 2004-11-25 | Tamagawa Seiki Co Ltd | 駆動回路内蔵型サーボモータ |
| JP2007288870A (ja) | 2006-04-13 | 2007-11-01 | Yaskawa Electric Corp | 中空アクチュエータ |
| JP2007319013A (ja) | 2006-05-30 | 2007-12-13 | Daiwa Seiko Inc | 魚釣用リールのハンドル取り付け構造 |
| JP2008115896A (ja) | 2006-11-01 | 2008-05-22 | Harmonic Drive Syst Ind Co Ltd | 波動歯車減速機を備えたアクチュエータ |
| JP2011065941A (ja) | 2009-09-18 | 2011-03-31 | Denso Wave Inc | ロボット用電池格納機構 |
| JP2016111740A (ja) | 2014-12-02 | 2016-06-20 | 株式会社ミツバ | 中空モータ |
| JP2017177275A (ja) | 2016-03-30 | 2017-10-05 | 日本電産サンキョー株式会社 | ロボット |
| JP2018144135A (ja) | 2017-03-02 | 2018-09-20 | 住友重機械工業株式会社 | モータ付きの駆動装置 |
| JP2018157613A (ja) | 2017-03-15 | 2018-10-04 | 日本電産サンキョー株式会社 | モータ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020205742A (ja) | 2020-12-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7512560B2 (ja) | 回転アクチュエータおよびロボット | |
| JP6836248B2 (ja) | 関節ユニット、ロボットアーム及びロボット | |
| JP7430584B2 (ja) | アクチュエータ及びブレーキ | |
| CN109075658B (zh) | 旋转致动器及机器人 | |
| JP4964303B2 (ja) | モータの回転位置検出装置 | |
| JP5263162B2 (ja) | 中空アクチュエータ | |
| JP5327724B2 (ja) | 回転電機、ロボット、回転電機の製造方法、中空軸 | |
| JP5197174B2 (ja) | 波動減速機付きモータ | |
| JP2012147541A (ja) | 電気機械装置およびそれを用いたアクチュエーター、モーター、ロボット、ロボットハンド。 | |
| JP2015181339A (ja) | ステップアクチュエータ | |
| WO2017169418A1 (ja) | 回転アクチュエータおよびロボット | |
| WO2017203753A1 (ja) | アクチュエータ | |
| EP3439153A1 (en) | Rotary actuator and robot | |
| JP2010187460A (ja) | サーボユニット | |
| CN105835085A (zh) | 机器人 | |
| JP2020192661A (ja) | ロボット | |
| JP2009160721A (ja) | 電動回転継手 | |
| JP7077854B2 (ja) | 回転アクチュエータ及びロボット | |
| JP5448252B2 (ja) | 回転電機及びロボット | |
| WO2023047916A1 (ja) | 電動アクチュエータ | |
| JP2005168211A (ja) | ステッピングモータ | |
| WO2015092887A1 (ja) | ブレーキ付きモータ | |
| JP4574731B2 (ja) | 振動波駆動装置 | |
| JP4725293B2 (ja) | モータユニット | |
| JP2025007176A (ja) | 電動アクチュエータ、および電動アクチュエータの製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20230117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230124 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231023 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240305 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240426 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240528 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240603 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7512560 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |