JP7519251B2 - 制御装置 - Google Patents
制御装置 Download PDFInfo
- Publication number
- JP7519251B2 JP7519251B2 JP2020166528A JP2020166528A JP7519251B2 JP 7519251 B2 JP7519251 B2 JP 7519251B2 JP 2020166528 A JP2020166528 A JP 2020166528A JP 2020166528 A JP2020166528 A JP 2020166528A JP 7519251 B2 JP7519251 B2 JP 7519251B2
- Authority
- JP
- Japan
- Prior art keywords
- locking device
- state
- human
- powered vehicle
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000004044 response Effects 0.000 claims description 32
- 230000001141 propulsive effect Effects 0.000 claims description 4
- 238000001514 detection method Methods 0.000 description 55
- 230000004048 modification Effects 0.000 description 6
- 238000012986 modification Methods 0.000 description 6
- 230000003287 optical effect Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000004744 fabric Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62H—CYCLE STANDS; SUPPORTS OR HOLDERS FOR PARKING OR STORING CYCLES; APPLIANCES PREVENTING OR INDICATING UNAUTHORIZED USE OR THEFT OF CYCLES; LOCKS INTEGRAL WITH CYCLES; DEVICES FOR LEARNING TO RIDE CYCLES
- B62H5/00—Appliances preventing or indicating unauthorised use or theft of cycles; Locks integral with cycles
- B62H5/02—Appliances preventing or indicating unauthorised use or theft of cycles; Locks integral with cycles for locking the steering mechanism
- B62H5/04—Appliances preventing or indicating unauthorised use or theft of cycles; Locks integral with cycles for locking the steering mechanism acting on the handlebars or equivalent
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62H—CYCLE STANDS; SUPPORTS OR HOLDERS FOR PARKING OR STORING CYCLES; APPLIANCES PREVENTING OR INDICATING UNAUTHORIZED USE OR THEFT OF CYCLES; LOCKS INTEGRAL WITH CYCLES; DEVICES FOR LEARNING TO RIDE CYCLES
- B62H5/00—Appliances preventing or indicating unauthorised use or theft of cycles; Locks integral with cycles
- B62H5/001—Preventing theft of parts or accessories used on cycles, e.g. lamp, dynamo
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62H—CYCLE STANDS; SUPPORTS OR HOLDERS FOR PARKING OR STORING CYCLES; APPLIANCES PREVENTING OR INDICATING UNAUTHORIZED USE OR THEFT OF CYCLES; LOCKS INTEGRAL WITH CYCLES; DEVICES FOR LEARNING TO RIDE CYCLES
- B62H5/00—Appliances preventing or indicating unauthorised use or theft of cycles; Locks integral with cycles
- B62H5/08—Appliances preventing or indicating unauthorised use or theft of cycles; Locks integral with cycles preventing the drive
- B62H5/10—Appliances preventing or indicating unauthorised use or theft of cycles; Locks integral with cycles preventing the drive acting on a pedal crank
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62H—CYCLE STANDS; SUPPORTS OR HOLDERS FOR PARKING OR STORING CYCLES; APPLIANCES PREVENTING OR INDICATING UNAUTHORIZED USE OR THEFT OF CYCLES; LOCKS INTEGRAL WITH CYCLES; DEVICES FOR LEARNING TO RIDE CYCLES
- B62H5/00—Appliances preventing or indicating unauthorised use or theft of cycles; Locks integral with cycles
- B62H5/14—Appliances preventing or indicating unauthorised use or theft of cycles; Locks integral with cycles preventing wheel rotation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J11/00—Supporting arrangements specially adapted for fastening specific devices to cycles, e.g. supports for attaching maps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J43/00—Arrangements of batteries
- B62J43/10—Arrangements of batteries for propulsion
- B62J43/13—Arrangements of batteries for propulsion on rider-propelled cycles with additional electric propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J43/00—Arrangements of batteries
- B62J43/20—Arrangements of batteries characterised by the mounting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/40—Sensor arrangements; Mounting thereof
- B62J45/41—Sensor arrangements; Mounting thereof characterised by the type of sensor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/40—Sensor arrangements; Mounting thereof
- B62J45/41—Sensor arrangements; Mounting thereof characterised by the type of sensor
- B62J45/412—Speed sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J9/00—Containers specially adapted for cycles, e.g. panniers or saddle bags
- B62J9/30—Containers specially adapted for cycles, e.g. panniers or saddle bags characterised by locking arrangements, e.g. top case locks integrated in a vehicle central locking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K7/00—Freight- or passenger-carrying cycles
- B62K7/02—Frames
- B62K7/04—Frames having a carrying platform
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J43/00—Arrangements of batteries
- B62J43/10—Arrangements of batteries for propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K5/00—Cycles with handlebars, equipped with three or more main road wheels
- B62K5/08—Cycles with handlebars, equipped with three or more main road wheels with steering devices acting on two or more wheels
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Lock And Its Accessories (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
人力駆動車は、少なくとも1つの車輪を有し、少なくとも人力駆動力によって駆動できる乗り物である。人力駆動車は、例えばマウンテンバイク、ロードバイク、シティバイク、カーゴバイク、および、ハンドバイク、リカンベントなど種々の種類の自転車を含む。人力駆動車が有する車輪の数は、限定されない。人力駆動車は、例えば1輪車および3輪以上の車輪を有する乗り物も含む。人力駆動車は、人力駆動力のみによって駆動できる乗り物に限定されない。人力駆動車は、人力駆動力だけではなく、電気モータの駆動力を推進に利用するイーバイク(E-bike)を含む。イーバイクは、電気モータによって推進が補助される電動アシスト自転車を含む。以下、実施形態において、人力駆動車を、カーゴバイク、および、電動アシスト自転車として説明する。



第2実施形態の第1制御装置26は、第1実施形態の第1制御装置26とは、第2インタフェース70bの構成、および、第1制御部70における処理が異なる。第2実施形態の第1制御装置26について、第1実施形態の第1制御装置26とは異なる部分についてのみ説明され、重複する説明は省略される。第2実施形態において人力駆動車10は、第1実施形態の人力駆動車10の構成に加えて、第3ロック装置80をさらに含む。好ましくは、人力駆動車10は、第2センサ82をさらに含む。第1制御装置26は、図4に示すように、第3ロック装置80、および、第2センサ82に接続される。
第3実施形態における人力駆動車10は、第2実施形態における人力駆動車10の構成に加えて、パーキングブレーキ装置86をさらに備える。パーキングブレーキ装置86は、例えば、一対のブレーキレバー28のうちの1つに設けられる。パーキングブレーキ装置86は、使用者によって操作される。パーキングブレーキ装置86は、例えば、使用者の手によって操作されるパーキングブレーキ装置操作部86Aを含む。パーキングブレーキ装置86は、人力駆動車10に制動力が生じる状態に保持する第4ロック状態と、使用者が、第2ブレーキレバー28bを自由に操作できる第4解除状態とに切り替えられる。使用者が第2ブレーキレバー28bを操作し、ブレーキ装置29によって制動力が発生する状態において、パーキングブレーキ装置操作部86Aが操作されると、パーキングブレーキ装置86は、第4ロック状態になり、第2ブレーキレバー28bの位置が固定される。パーキングブレーキ装置86およびパーキングブレーキ装置操作部86Aについては、一般的な構造を用いることができるので、詳細な説明を省略する。パーキングブレーキ装置86は、第1ブレーキレバー28aに設けられてもよく、第1ブレーキレバー28a、および、第2ブレーキレバー28bの両方に設けられてもよい。

第4実施形態の第1制御装置26は、第3実施形態の第1制御装置26とは、第1制御部70における処理が異なる。以下において、第4実施形態の第1制御装置26について、第3実施形態の第1制御装置26とは異なる部分についてのみ説明され、重複する説明は省略される。本実施形態の第1制御部70は、第1ロック装置60、および、第2ロック装置62の少なくとも1つを、パーキングブレーキ装置86の状態、および、第3ロック装置80の状態に応じて制御するように構成される。例えば、第1制御部70は、第1ロック装置60、および、第2ロック装置62を、パーキングブレーキ装置86の状態、および、第3ロック装置80の状態に応じて制御するように構成される。

第4実施形態の変形例の第1制御装置26は、第4実施形態の第1制御装置26とは、第1制御部70における処理が異なる。第4実施形態の変形例における人力駆動車10は、第2実施形態における人力駆動車10の構成と同様である。第1ロック装置60、第2ロック装置62、および、第3ロック装置80を除くコンポーネントは、電動ドライブユニット22を含んでもよい。本実施形態の変形例の第1制御部70は、電動ドライブユニット22の状態と、第3ロック装置80の状態とに応じて、第1ロック装置60、および、第2ロック装置62を制御するように構成される。


第5実施形態の第1制御装置26は、第2実施形態の第1制御装置26とは、第1制御部70における処理が異なる。第5実施形態において、人力駆動車10は、電動ドライブユニット22を含まなくてもよい。第1制御部70は、人力駆動車10に設けられる複数のロック装置のうちの1つのロック装置の状態に応じて、複数のロック装置のうちの1つのロック装置を除く他の2つ以上のロック装置を制御するように構成される。複数のロック装置は、第1ロック装置60、第2ロック装置62、および、第3ロック装置80を含む。

第6実施形態の第1制御装置26は、第2実施形態の第1制御装置26とは、第1制御部70における処理が異なる。本実施形態の第1制御部70は、第1ロック装置60を、第3ロック装置80の状態に応じて制御するように構成される。第1制御部70は、第3ロック装置80の状態に応じて第1ロック装置60を制御する。第1制御部70は、第3ロック装置80が第3ロック状態である場合、第1ロック装置60を第1ロック状態にするように第1電動アクチュエータ60aを制御する。第1制御部70は、第3ロック装置80が第3解除状態である場合、第1ロック装置60を第1解除状態にするように、第2電動アクチュエータ62aを制御する。表10は、第1記憶部72に記憶される、第3ロック装置80の状態と、第1ロック装置60の状態との対応関係の情報の一例を示す。

各実施形態およびその変形例において、操作装置50は、第1ロック装置60、第2ロック装置62、および、第3ロック装置80の少なくとも2つを操作するように構成されてもよい。第1制御部70は、第1ロック装置60、第2ロック装置62、および、第3ロック装置80の少なくとも2つを、操作装置50の操作に応じて制御するように構成されてもよい。例えば、第1制御部70は、第1ロック装置60の状態を切り替えるように操作装置50が使用者によって操作されると、使用者の操作に応じて第1ロック装置60を制御してもよい。例えば、第1制御部70は、第1ロック装置60の操作に応じて、第2ロック装置62、および、第3ロック装置80を制御してもよい。
Claims (21)
- 人力駆動車用の制御装置であって、
前記人力駆動車の荷台に関する第1ロック装置、および、前記人力駆動車のバッテリに関する第2ロック装置の少なくとも1つを、前記人力駆動車の走行状態に応じて制御するように構成される制御部を備え、
前記第1ロック装置は、第1電動アクチュエータを有し、第1ロック状態において前記荷台の少なくとも1つの開口をカバーするように構成される少なくとも1つのカバー部材の移動を抑制し、第1解除状態において前記カバー部材の移動を抑制しないように構成され、
前記制御部は、前記第1電動アクチュエータを制御することによって、前記第1ロック状態と前記第1解除状態とを切り替えるように構成される制御装置。 - 前記人力駆動車の前記走行状態は、前記人力駆動車の走行速度が予め定める速度以下の第1状態と、前記人力駆動車の前記走行速度が予め定める速度を超える第2状態とを含む、請求項1に記載の制御装置。
- 前記制御部は、
前記人力駆動車の前記走行状態が前記第1状態の場合、前記第1ロック装置を前記第1解除状態にするように、前記第1電動アクチュエータを制御し、
前記人力駆動車の前記走行状態が前記第2状態の場合、前記第1ロック装置を前記第1ロック状態にするように、前記第1電動アクチュエータを制御する、請求項2に記載の制御装置。 - 人力駆動車用の制御装置であって、
前記人力駆動車の荷台に関する第1ロック装置、および、前記人力駆動車のバッテリに関する第2ロック装置の少なくとも1つを、前記人力駆動車の走行状態に応じて制御するように構成される制御部を備え、
前記制御部は、前記第1ロック装置、および、前記第2ロック装置の少なくとも1つを、前記人力駆動車の前記走行状態と、前記人力駆動車の移動を抑制するように構成される第3ロック装置の状態と、に応じて制御するように構成される制御装置。 - 前記第1ロック装置は、第1電動アクチュエータを有し、第1ロック状態において前記荷台の少なくとも1つの開口をカバーするように構成される少なくとも1つのカバー部材の移動を抑制し、第1解除状態において前記少なくとも1つのカバー部材の移動を抑制しないように構成され、
前記制御部は、前記第1電動アクチュエータを制御することによって、前記第1ロック状態と前記第1解除状態とを切り替えるように構成される、請求項4に記載の制御装置。 - 前記人力駆動車の前記走行状態は、前記人力駆動車の走行速度が予め定める速度以下の第1状態と、前記人力駆動車の前記走行速度が予め定める値を超える第2状態とを含む、請求項5に記載の制御装置。
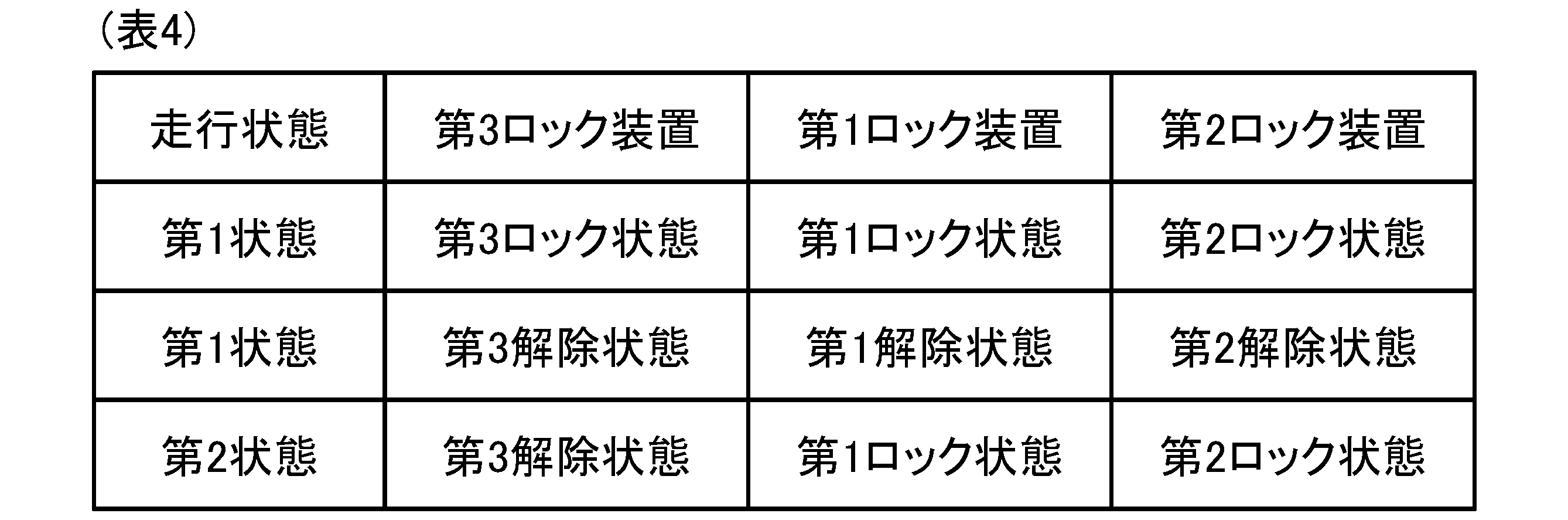
- 前記第3ロック装置の前記状態は、前記人力駆動車の移動を抑制する第3ロック状態と、前記人力駆動車の移動を抑制しない第3解除状態と、を含み、
前記制御部は、
前記人力駆動車の前記走行状態が前記第1状態であり、かつ、前記第3ロック装置が前記第3ロック状態である場合、前記第1ロック装置を前記第1ロック状態にするように、前記第1電動アクチュエータを制御し、
前記人力駆動車の前記走行状態が前記第1状態であり、かつ、前記第3ロック装置が前記第3解除状態である場合、前記第1ロック装置を前記第1解除状態にするように、前記第1電動アクチュエータを制御し、
前記人力駆動車の前記走行状態が前記第2状態である場合、前記第1ロック装置を前記第1ロック状態にするように、前記第1電動アクチュエータを制御する、請求項6に記載の制御装置。 - 前記第2ロック装置は、第2電動アクチュエータを有し、第2ロック状態において前記バッテリの取り外しを抑制し、第2解除状態において前記バッテリの取り外しを抑制しないように構成され、
前記制御部は、前記第2電動アクチュエータを制御することによって、前記第2ロック状態と前記第2解除状態とを切り替えるように構成される、請求項1から7のいずれか一項に記載の制御装置。 - 前記人力駆動車は、前記人力駆動車の走行状態に関する情報を検出する第1センサを備え、
前記制御部は、前記第1センサによって検出される情報を入力するように構成される第1インタフェースを含む、請求項1から8のいずれか一項に記載の制御装置。 - 人力駆動車用の制御装置であって、
前記人力駆動車の荷台に関する第1ロック装置、前記人力駆動車のバッテリに関する第2ロック装置、および、前記人力駆動車の動作を抑制するように構成される第3ロック装置の少なくとも1つを、前記人力駆動車のコンポーネントのうち、前記第1ロック装置、前記第2ロック装置、および、前記第3ロック装置を除くコンポーネントの状態に応じて制御する制御部を備える制御装置。 - 前記コンポーネントは、前記人力駆動車のパーキングブレーキ装置を含む、請求項10に記載の制御装置。
- 前記コンポーネントは、前記人力駆動車に推進力を付与するように構成される電動ドライブユニットを含む、請求項10または11に記載の制御装置。
- 人力駆動車用の制御装置であって、
前記人力駆動車に設けられる複数のロック装置のうちの1つのロック装置の状態に応じて、前記複数のロック装置のうちの前記1つのロック装置を除く他の2つ以上のロック装置を制御するように構成される制御部を備える制御装置。 - 前記複数のロック装置は、前記人力駆動車の荷台に関する第1ロック装置、前記人力駆動車のバッテリに関する第2ロック装置、および、前記人力駆動車の移動を抑制するように構成される第3ロック装置を含む、請求項13に記載の制御装置。
- 前記制御部は、前記第1ロック装置、および、前記第2ロック装置のうちの一方の状態に応じて、前記第1ロック装置、および、前記第2ロック装置のうちの他方と、前記第3ロック装置とを制御する、請求項14に記載の制御装置。
- 人力駆動車用の制御装置であって、
前記人力駆動車の荷台に関する第1ロック装置を、前記人力駆動車の移動を抑制するように構成される第3ロック装置の状態に応じて制御する制御部を備える制御装置。 - 前記人力駆動車は、前記第3ロック装置の前記状態に関する情報を検出する第2センサを備え、
前記制御部は、前記第2センサによって検出される情報を入力する第2インタフェースを含む、請求項4から7、10、14から16のいずれか一項に記載の制御装置。 - 前記第1ロック装置は、第1電動アクチュエータを有し、第1ロック状態において前記荷台の少なくとも1つの開口をカバーするように構成される少なくとも1つのカバー部材の移動を抑制し、第1解除状態において前記少なくとも1つのカバー部材の移動を抑制しないように構成され、
前記制御部は、前記第1電動アクチュエータを制御することによって、前記第1ロック状態と前記第1解除状態とを切り替えるように構成される、請求項14、16または17のいずれか一項に記載の制御装置。 - 人力駆動車用の制御装置であって、
前記人力駆動車の荷台に関する第1ロック装置、前記人力駆動車のバッテリに関する第2ロック装置、および、前記人力駆動車の移動を抑制するように構成される第3ロック装置の少なくとも2つを、操作装置の操作に応じて制御するように構成される制御部を備える制御装置。 - 前記制御部は、前記操作装置から無線送信される信号、および、前記操作装置から電線を介して送信される信号の少なくとも1つを受信するように構成される第3インタフェースをさらに含む、請求項19に記載の制御装置。
- 前記第3ロック装置は、前記人力駆動車の車輪の回転を抑制するように構成される車輪ロック装置、前記人力駆動車のクランクの回転を抑制するように構成されるクランクロック装置、前記人力駆動車のハンドルの回転を抑制するように構成されるハンドルロック装置の少なくとも1つを含む、請求項4から7、10、14から17、19、20のいずれか一項に記載の制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020166528A JP7519251B2 (ja) | 2020-09-30 | 2020-09-30 | 制御装置 |
| DE102021124489.7A DE102021124489A1 (de) | 2020-09-30 | 2021-09-22 | Steuervorrichtung |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020166528A JP7519251B2 (ja) | 2020-09-30 | 2020-09-30 | 制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022057986A JP2022057986A (ja) | 2022-04-11 |
| JP7519251B2 true JP7519251B2 (ja) | 2024-07-19 |
Family
ID=80624727
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020166528A Active JP7519251B2 (ja) | 2020-09-30 | 2020-09-30 | 制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7519251B2 (ja) |
| DE (1) | DE102021124489A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2026000047A (ja) * | 2024-06-17 | 2026-01-05 | カワサキモータース株式会社 | 車両及び収容フレーム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008230293A (ja) | 2007-03-16 | 2008-10-02 | Yamaha Motor Co Ltd | 自動二輪車 |
| JP2011063981A (ja) | 2009-09-16 | 2011-03-31 | Kawasaki Heavy Ind Ltd | 車両用開閉蓋のロックシステム |
| CN104648545A (zh) | 2013-11-20 | 2015-05-27 | 阮桥本 | 机车行李箱自动启闭单箱或多箱连动锁装置 |
| US20180370594A1 (en) | 2017-06-23 | 2018-12-27 | Social Bicycles Inc. | Electric assist bicycle |
| WO2019194009A1 (ja) | 2018-04-02 | 2019-10-10 | 本田技研工業株式会社 | 電動車両 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08142964A (ja) * | 1994-11-17 | 1996-06-04 | Yamaha Motor Co Ltd | パワーアシスト三輪自転車 |
| JP2018086897A (ja) | 2016-11-28 | 2018-06-07 | 東海理研株式会社 | キャリーボックス付き電動バイク |
-
2020
- 2020-09-30 JP JP2020166528A patent/JP7519251B2/ja active Active
-
2021
- 2021-09-22 DE DE102021124489.7A patent/DE102021124489A1/de active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008230293A (ja) | 2007-03-16 | 2008-10-02 | Yamaha Motor Co Ltd | 自動二輪車 |
| JP2011063981A (ja) | 2009-09-16 | 2011-03-31 | Kawasaki Heavy Ind Ltd | 車両用開閉蓋のロックシステム |
| CN104648545A (zh) | 2013-11-20 | 2015-05-27 | 阮桥本 | 机车行李箱自动启闭单箱或多箱连动锁装置 |
| US20180370594A1 (en) | 2017-06-23 | 2018-12-27 | Social Bicycles Inc. | Electric assist bicycle |
| WO2019194009A1 (ja) | 2018-04-02 | 2019-10-10 | 本田技研工業株式会社 | 電動車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102021124489A1 (de) | 2022-03-31 |
| JP2022057986A (ja) | 2022-04-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5721256B2 (ja) | 電動車両の制御装置 | |
| US6623023B2 (en) | Bicycle and bicycle folding method | |
| EP2189346B1 (en) | Vehicle having a drive source capable of performing backward driving | |
| CN107826204B (zh) | 电动辅助自行车 | |
| US9096132B2 (en) | Regeneration control system in electric vehicle | |
| JP5842105B2 (ja) | 電動アシスト自転車 | |
| CN109969323B (zh) | 刹车控制装置及刹车系统 | |
| JP2019077241A (ja) | ブレーキ制御装置およびブレーキシステム | |
| JP2017100541A (ja) | 電動補助自転車 | |
| WO2006028978A2 (en) | Personal transport vehicle and method | |
| JP2007210608A (ja) | 一体形車輪駆動装置付き二輪車 | |
| JP2021062640A (ja) | 自己充電で走行可能な電動自転車 | |
| JP2013136302A (ja) | 車両 | |
| JP5429794B2 (ja) | アシストモータ付き走行車両 | |
| JP7519251B2 (ja) | 制御装置 | |
| JP2020104817A (ja) | 故障検出装置、電動自転車及び故障検出方法 | |
| JP2020069985A (ja) | 人力駆動車用制御装置 | |
| KR102103554B1 (ko) | 전 후륜 모터가 구비되는 전기 자전거 | |
| JP2019098859A (ja) | 変速制御装置および電動変速システム | |
| JP2012017009A (ja) | 車両 | |
| JPH09207846A (ja) | 自転車用スタンド | |
| JP2006054982A (ja) | 電動モータ式カート | |
| JP7137664B1 (ja) | 乗物 | |
| JP2003127959A (ja) | 電動二輪車のスロットル開度検出装置 | |
| JP3638701B2 (ja) | 電動補助車両の補助力制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210922 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230609 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240305 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240625 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240708 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7519251 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |