JP7519619B2 - 情報処理装置、情報処理方法、及びプログラム - Google Patents
情報処理装置、情報処理方法、及びプログラム Download PDFInfo
- Publication number
- JP7519619B2 JP7519619B2 JP2020040261A JP2020040261A JP7519619B2 JP 7519619 B2 JP7519619 B2 JP 7519619B2 JP 2020040261 A JP2020040261 A JP 2020040261A JP 2020040261 A JP2020040261 A JP 2020040261A JP 7519619 B2 JP7519619 B2 JP 7519619B2
- Authority
- JP
- Japan
- Prior art keywords
- threat level
- unit
- time
- target space
- route
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Description
図1は、実施形態に係る情報処理システム1の構成の一例を示す図である。図示のように、情報処理システム1は、例えば、気象観測装置10と、気象予測装置20と、第1情報処理装置100と、第2情報処理装置200と、学習装置300とを備える。これらの装置は、ネットワークNWに接続される。ネットワークNWは、例えば、WAN(Wide Area Network)やLAN(Local Area Network)などである。
以下、第1情報処理装置100の構成について説明する。第1情報処理装置100は、単一の装置であってもよいし、ネットワークNWを介して接続された複数の装置が互いに協働して動作するシステムであってもよい。すなわち、第1情報処理装置100は、分散コンピューティングやクラウドコンピューティングを利用したシステムに含まれる複数のコンピュータ(プロセッサ)によって実装されてもよい。
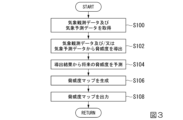
以下、フローチャートに即して第1情報処理装置100の一連の処理の流れを説明する。図3は、実施形態に係る第1情報処理装置100の一連の処理の流れの一例を示すフローチャートである。本フローチャートの処理は、例えば、所定の周期で繰り返し行われてよい。また、第1情報処理装置100が、分散コンピューティングやクラウドコンピューティングを利用したシステムに含まれる複数のコンピュータによって実装される場合、本フローチャートの処理の一部または全部は、複数のコンピュータによって並列処理されてよい。
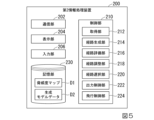
以下、第2情報処理装置200の構成について説明する。図5は、実施形態に係る第2情報処理装置200の構成の一例を示す図である。図示のように、第2情報処理装置200は、例えば、通信部202と、表示部204と、制御部210と、記憶部230とを備える。
以下、フローチャートに即して第2情報処理装置200の一連の処理の流れを説明する。図6は、実施形態に係る第2情報処理装置200の一連の処理の流れの一例を示すフローチャートである。本フローチャートの処理は、例えば、所定の周期で繰り返し行われてよい。
以下、学習装置300の構成について説明する。学習装置300は、第1情報処理装置100と同様に、単一の装置であってもよいし、ネットワークNWを介して接続された複数の装置が互いに協働して動作するシステムであってもよい。すなわち、学習装置300は、分散コンピューティングやクラウドコンピューティングを利用したシステムに含まれる複数のコンピュータ(プロセッサ)によって実装されてもよい。
以下、フローチャートに即して学習装置300の一連の処理の流れを説明する。図11は、実施形態に係る学習装置300の一連の処理の流れの一例を示すフローチャートである。本フローチャートの処理は、例えば、所定の周期で繰り返し行われてよい。また、学習装置300が、分散コンピューティングやクラウドコンピューティングを利用したシステムに含まれる複数のコンピュータによって実装される場合、本フローチャートの処理の一部または全部は、複数のコンピュータによって並列処理されてよい。
Claims (11)
- ある観測時刻に観測された対象空間の気象を表す気象観測データと、気象予測モデルにより前記観測時刻の前記気象観測データから予測された前記観測時刻よりも将来の時刻の前記対象空間の気象を表す気象予測データとの少なくとも一方を基に導出された脅威度であって、前記観測時刻または前記観測時刻よりも将来の時刻の前記対象空間の雷の脅威度を示す脅威度情報を取得する取得部と、
前記対象空間上において移動体が移動すべき複数の経路を生成する生成部と、
前記取得部によって取得された前記脅威度情報に基づいて、前記生成部により生成された前記複数の経路のそれぞれを評価する評価部と、
前記評価部による評価結果に基づいて、前記複数の経路の中から一つの経路を選択する選択部と、を備え、
前記生成部は、ある対象時刻における前記対象空間の雷の脅威度を示す脅威度情報に対して、前記対象時刻における前記対象空間上において前記移動体が移動すべき経路が対応付けられた教師データに基づいて学習された機械学習モデルである学習済みモデルに、前記取得部によって取得された前記脅威度情報を入力し、前記脅威度情報が入力された前記学習済みモデルの出力結果に基づいて、前記観測時刻の前記対象空間上において前記移動体が移動すべき複数の経路を生成し、
前記対象空間は、複数のグリッドによって区切られており、
前記脅威度情報は、前記複数のグリッドのそれぞれに対応付けられた雷の脅威度が所定の画素値に置き換えられた画像データである脅威度マップであり、
前記教師データは、少なくとも前記対象時刻における前記脅威度マップに対して、前記対象時刻における前記対象空間上において前記移動体が被雷しなかった経路が対応付けられたデータセットである、
情報処理装置。 - 前記評価部は、前記脅威度と、前記移動体の運用効率とのそれぞれを説明変数とする評価関数に基づいて、前記複数の経路のそれぞれを評価する、
請求項1に記載の情報処理装置。 - 前記評価関数は、前記脅威度が大きいほど、又は前記移動体の運用効率が低いほど、前記経路を低く評価し、前記脅威度が小さいほど、又は前記移動体の運用効率が高いほど、前記経路を高く評価する関数である、
請求項2に記載の情報処理装置。 - 前記移動体の運用効率には、前記経路に沿って前記移動体が移動したときに要する移動時間と、前記経路に沿って前記移動体が移動したときに消費するエネルギー量とが含まれる、
請求項2又は3に記載の情報処理装置。 - 前記選択部によって選択された前記経路に基づいて、前記移動体の移動を制御する移動制御部を更に備える、
請求項1から4のうちいずれか一項に記載の情報処理装置。 - 情報を出力する出力部と、
前記選択部によって選択された前記経路を表す情報を、前記出力部に出力させる出力制御部と、を更に備える、
請求項1から5のうちいずれか一項に記載の情報処理装置。 - ユーザの入力操作が入力される入力部を更に備え、
前記出力制御部は、前記評価部によって評価された前記複数の経路のそれぞれを表す情報を、前記出力部に出力させ、
前記選択部は、前記出力部によって前記複数の経路のそれぞれを表す情報が出力された後に、前記入力部に対して、前記複数の経路のうちいずれか一つを選択する操作が入力された場合、前記評価部の評価結果よりも前記入力部に対する入力操作を優先的に参照して、前記複数の経路の中から一つの経路を選択する、
請求項6に記載の情報処理装置。 - 前記出力制御部は、各経路に対して前記評価部の評価結果が対応付けられた情報を、前記出力部に出力させる、
請求項7に記載の情報処理装置。 - ある観測時刻に観測された対象空間の気象を表す気象観測データと、気象予測モデルにより前記観測時刻の前記気象観測データから予測された前記観測時刻よりも将来の時刻の前記対象空間の気象を表す気象予測データとの少なくとも一方を基に導出された脅威度であって、前記観測時刻または前記観測時刻よりも将来の時刻の前記対象空間の雷の脅威度を示す脅威度情報を取得する取得部と、
ある対象時刻における前記対象空間の雷の脅威度を示す脅威度情報に対して、前記対象時刻における前記対象空間上において移動体が移動すべき経路が対応付けられた教師データに基づいて学習された機械学習モデルである学習済みモデルに、前記取得部によって取得された前記脅威度情報を入力し、前記脅威度情報が入力された前記学習済みモデルの出力結果に基づいて、前記観測時刻の前記対象空間上において前記移動体が移動すべき経路を生成する生成部と、を備え、
前記対象空間は、複数のグリッドによって区切られており、
前記脅威度情報は、前記複数のグリッドのそれぞれに対応付けられた雷の脅威度が所定の画素値に置き換えられた画像データである脅威度マップであり、
前記教師データは、少なくとも前記対象時刻における前記脅威度マップに対して、前記対象時刻における前記対象空間上において前記移動体が被雷しなかった経路が対応付けられたデータセットである、
情報処理装置。 - コンピュータが、
ある観測時刻に観測された対象空間の気象を表す気象観測データと、気象予測モデルにより前記観測時刻の前記気象観測データから予測された前記観測時刻よりも将来の時刻の前記対象空間の気象を表す気象予測データとの少なくとも一方を基に導出された脅威度であって、前記観測時刻または前記観測時刻よりも将来の時刻の前記対象空間の雷の脅威度を示す脅威度情報を取得し、
前記対象空間上において移動体が移動すべき複数の経路を生成し、
取得した前記脅威度情報に基づいて、生成した前記複数の経路のそれぞれを評価し、
前記複数の経路のそれぞれの評価結果に基づいて、前記複数の経路の中から一つの経路を選択し、
ある対象時刻における前記対象空間の雷の脅威度を示す脅威度情報に対して、前記対象時刻における前記対象空間上において前記移動体が移動すべき経路が対応付けられた教師データに基づいて学習された機械学習モデルである学習済みモデルに、取得した前記脅威度情報を入力し、
前記脅威度情報が入力された前記学習済みモデルの出力結果に基づいて、前記観測時刻の前記対象空間上において前記移動体が移動すべき複数の経路を生成し、
前記対象空間は、複数のグリッドによって区切られており、
前記脅威度情報は、前記複数のグリッドのそれぞれに対応付けられた雷の脅威度が所定の画素値に置き換えられた画像データである脅威度マップであり、
前記教師データは、少なくとも前記対象時刻における前記脅威度マップに対して、前記対象時刻における前記対象空間上において前記移動体が被雷しなかった経路が対応付けられたデータセットである、
情報処理方法。 - コンピュータに実行させるためのプログラムであって、
ある観測時刻に観測された対象空間の気象を表す気象観測データと、気象予測モデルにより前記観測時刻の前記気象観測データから予測された前記観測時刻よりも将来の時刻の前記対象空間の気象を表す気象予測データとの少なくとも一方を基に導出された脅威度であって、前記観測時刻または前記観測時刻よりも将来の時刻の前記対象空間の雷の脅威度を示す脅威度情報を取得すること、
前記対象空間上において移動体が移動すべき複数の経路を生成すること、
取得した前記脅威度情報に基づいて、生成した前記複数の経路のそれぞれを評価すること、
前記複数の経路のそれぞれの評価結果に基づいて、前記複数の経路の中から一つの経路を選択すること、
ある対象時刻における前記対象空間の雷の脅威度を示す脅威度情報に対して、前記対象時刻における前記対象空間上において前記移動体が移動すべき経路が対応付けられた教師データに基づいて学習された機械学習モデルである学習済みモデルに、取得した前記脅威度情報を入力すること、
前記脅威度情報が入力された前記学習済みモデルの出力結果に基づいて、前記観測時刻の前記対象空間上において前記移動体が移動すべき複数の経路を生成すること、を含み、
前記対象空間は、複数のグリッドによって区切られており、
前記脅威度情報は、前記複数のグリッドのそれぞれに対応付けられた雷の脅威度が所定の画素値に置き換えられた画像データである脅威度マップであり、
前記教師データは、少なくとも前記対象時刻における前記脅威度マップに対して、前記対象時刻における前記対象空間上において前記移動体が被雷しなかった経路が対応付けられたデータセットである、
プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020040261A JP7519619B2 (ja) | 2020-03-09 | 2020-03-09 | 情報処理装置、情報処理方法、及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020040261A JP7519619B2 (ja) | 2020-03-09 | 2020-03-09 | 情報処理装置、情報処理方法、及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021140685A JP2021140685A (ja) | 2021-09-16 |
| JP7519619B2 true JP7519619B2 (ja) | 2024-07-22 |
Family
ID=77669625
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020040261A Active JP7519619B2 (ja) | 2020-03-09 | 2020-03-09 | 情報処理装置、情報処理方法、及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7519619B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024024257A1 (ja) * | 2022-07-25 | 2024-02-01 | 株式会社エムティーアイ | 航空機の航路決定を支援する表示プログラム |
| JP7326564B1 (ja) | 2022-09-08 | 2023-08-15 | 三菱重工業株式会社 | 被雷予測地図作成装置、被雷予測地図共有システム、被雷予測地図作成方法、及び被雷予測地図作成プログラム |
| JP7571103B2 (ja) * | 2022-10-27 | 2024-10-22 | 三菱重工業株式会社 | データ符号化装置、データ伝送システム、データ符号化方法およびデータ符号化プログラム |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000512015A (ja) | 1996-06-07 | 2000-09-12 | セクスタン タヴィオニーク | 乗り物が移動領域に対し横方向に回避する方法 |
| JP2007285883A (ja) | 2006-04-17 | 2007-11-01 | Xanavi Informatics Corp | ナビゲーション装置 |
| JP2009192312A (ja) | 2008-02-13 | 2009-08-27 | Nippon Telegr & Teleph Corp <Ntt> | 発雷予測装置およびその方法、プログラム |
| JP2016126382A (ja) | 2014-12-26 | 2016-07-11 | 三菱電機株式会社 | Itsスポットサービスシステム |
| JP2018195332A (ja) | 2018-07-23 | 2018-12-06 | 三菱電機株式会社 | 移動体運行管理システム |
| JP2019184357A (ja) | 2018-04-06 | 2019-10-24 | 翼 中村 | ナビゲーション装置、移動体、ナビゲーションシステムおよびプログラム |
-
2020
- 2020-03-09 JP JP2020040261A patent/JP7519619B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000512015A (ja) | 1996-06-07 | 2000-09-12 | セクスタン タヴィオニーク | 乗り物が移動領域に対し横方向に回避する方法 |
| JP2007285883A (ja) | 2006-04-17 | 2007-11-01 | Xanavi Informatics Corp | ナビゲーション装置 |
| JP2009192312A (ja) | 2008-02-13 | 2009-08-27 | Nippon Telegr & Teleph Corp <Ntt> | 発雷予測装置およびその方法、プログラム |
| JP2016126382A (ja) | 2014-12-26 | 2016-07-11 | 三菱電機株式会社 | Itsスポットサービスシステム |
| JP2019184357A (ja) | 2018-04-06 | 2019-10-24 | 翼 中村 | ナビゲーション装置、移動体、ナビゲーションシステムおよびプログラム |
| JP2018195332A (ja) | 2018-07-23 | 2018-12-06 | 三菱電機株式会社 | 移動体運行管理システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021140685A (ja) | 2021-09-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109801512B (zh) | 考虑区域中的微风条件的系统及规划飞行计划方法 | |
| US11249494B2 (en) | Systems and methods for sensing and avoiding external objects for aircraft | |
| JP7519619B2 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| JP6950117B1 (ja) | 学習装置、情報処理装置、及び学習済の制御モデル | |
| CN112148008B (zh) | 一种基于深度强化学习的实时无人机路径预测方法 | |
| US20190354644A1 (en) | Apparatuses and methods for detecting anomalous aircraft behavior using machine learning applications | |
| US20150379408A1 (en) | Using Sensor Information for Inferring and Forecasting Large-Scale Phenomena | |
| US8977484B1 (en) | Using aircraft trajectory data to infer aircraft intent | |
| EP2685440B1 (en) | Using aircraft trajectory data to infer aircraft intent | |
| CN103472850A (zh) | 一种基于高斯分布预测的多无人机协同搜索方法 | |
| JP2020077387A (ja) | 垂直飛行経路の最適化 | |
| CN109063891B (zh) | 一种无人机调度路线规划方法 | |
| Reymann et al. | Adaptive sampling of cumulus clouds with UAVs | |
| CN114138005A (zh) | 基于改进a*算法的城区批量物流无人机航迹规划方法及装置 | |
| Duan et al. | Meteorology-aware path planning for the UAV based on the improved intelligent water drops algorithm | |
| Fraser et al. | A deep mixture of experts network for drone trajectory intent classification and prediction using non-cooperative radar data | |
| CN117873125A (zh) | 一种无人机飞行控制方法、存储介质及电子设备 | |
| CN120020670A (zh) | 为飞行器选择高度变化阶段航线 | |
| Grasso et al. | A decision support system for optimal deployment of sonobuoy networks based on sea current forecasts and multi-objective evolutionary optimization | |
| US11487301B2 (en) | Method and device for generating an optimum vertical trajectory intended to be followed by an aircraft | |
| Zheng et al. | Deep Reinforcement Learning-Based Path Planning Method for Stratospheric Airships in Spatiotemporally Complex Environments | |
| CN117870682A (zh) | 无人机集群航迹生成方法、装置、电子设备及存储介质 | |
| US20230022975A1 (en) | Information processing device, display device, information processing method, and storage medium | |
| Zhang et al. | Design of the fruit fly optimization algorithm based path planner for UAV in 3D environments | |
| EP4398063B1 (en) | System and method for operating an aircraft during a climb phase |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7426 Effective date: 20200402 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20200402 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230921 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231031 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231218 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240312 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240508 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240611 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240628 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7519619 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |