JP7520444B2 - 乗り物に基づくデータ処理方法、データ処理装置、コンピュータ機器、及びコンピュータプログラム - Google Patents
乗り物に基づくデータ処理方法、データ処理装置、コンピュータ機器、及びコンピュータプログラム Download PDFInfo
- Publication number
- JP7520444B2 JP7520444B2 JP2022565903A JP2022565903A JP7520444B2 JP 7520444 B2 JP7520444 B2 JP 7520444B2 JP 2022565903 A JP2022565903 A JP 2022565903A JP 2022565903 A JP2022565903 A JP 2022565903A JP 7520444 B2 JP7520444 B2 JP 7520444B2
- Authority
- JP
- Japan
- Prior art keywords
- predicted
- vehicle
- lane change
- offset
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0027—Planning or execution of driving tasks using trajectory prediction for other traffic participants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/04—Traffic conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0097—Predicting future conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0011—Planning or execution of driving tasks involving control alternatives for a single driving scenario, e.g. planning several paths to avoid obstacles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0027—Planning or execution of driving tasks using trajectory prediction for other traffic participants
- B60W60/00274—Planning or execution of driving tasks using trajectory prediction for other traffic participants considering possible movement changes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
- G06F18/243—Classification techniques relating to the number of classes
- G06F18/24323—Tree-organised classifiers
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N5/00—Computing arrangements using knowledge-based models
- G06N5/01—Dynamic search techniques; Heuristics; Dynamic trees; Branch-and-bound
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N5/00—Computing arrangements using knowledge-based models
- G06N5/04—Inference or reasoning models
- G06N5/045—Explanation of inference; Explainable artificial intelligence [XAI]; Interpretable artificial intelligence
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/764—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using classification, e.g. of video objects
- G06V10/765—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using classification, e.g. of video objects using rules for classification or partitioning the feature space
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4045—Intention, e.g. lane change or imminent movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4046—Behavior, e.g. aggressive or erratic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/406—Traffic density
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/10—Historical data
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Data Mining & Analysis (AREA)
- General Physics & Mathematics (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Mathematical Physics (AREA)
- General Engineering & Computer Science (AREA)
- Software Systems (AREA)
- Computing Systems (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Computational Linguistics (AREA)
- Medical Informatics (AREA)
- Evolutionary Biology (AREA)
- Bioinformatics & Computational Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Multimedia (AREA)
- Health & Medical Sciences (AREA)
- Databases & Information Systems (AREA)
- General Health & Medical Sciences (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
第1乗り物の少なくとも2つの予測オフセット、第1乗り物の第1走行状態、及び第2乗り物の第2走行状態を決定するステップであって、第2乗り物は、第1乗り物が車線を変更する際に参照する乗り物である、ステップと、
第1走行状態及び第2走行状態に基づいて、第2乗り物が「譲る」予測状態にある場合の各予測オフセットの第1車線変更利得を決定するとともに、第2乗り物が「譲らない」予測状態にある場合の各予測オフセットの第2車線変更利得を決定するステップと、
第2乗り物の予測譲り確率を決定し、予測譲り確率と、各予測オフセットの第1車線変更利得及び第2車線変更利得とに基づいて、各予測オフセットのターゲット車線変更利得を生成し、ターゲット車線変更利得が最大となる予測オフセットをターゲット予測オフセットとして決定するステップであって、ターゲット予測オフセットは、第1乗り物に対して予測された側方車線変更走行距離を示すためのものである、ステップと、を含む。
第1乗り物の少なくとも2つの予測オフセット、第1乗り物の第1走行状態、及び第2乗り物の第2走行状態を決定する状態取得モジュールであって、第2乗り物は、第1乗り物が車線を変更する際に参照する乗り物である、状態取得モジュールと、
第1走行状態及び第2走行状態に基づいて、第2乗り物が「譲る」予測状態にある場合の各予測オフセットの第1車線変更利得を決定するとともに、第2乗り物が「譲らない」予測状態にある場合の各予測オフセットの第2車線変更利得を決定する利得取得モジュールと、
第2乗り物の予測譲り確率を決定し、予測譲り確率と、各予測オフセットの第1車線変更利得及び第2車線変更利得とに基づいて、各予測オフセットのターゲット車線変更利得を生成し、ターゲット車線変更利得が最大となる予測オフセットをターゲット予測オフセットとして決定するオフセット選択モジュールであって、ターゲット予測オフセットは、第1乗り物に対して予測された側方車線変更走行距離を示すためのものである、オフセット選択モジュールと、を含む。







































利得取得モジュール12は、第1走行状態及び第2走行状態に基づいて、第2乗り物が「譲る」予測状態にある場合の各予測オフセットの第1車線変更利得を決定するとともに、第2乗り物が「譲らない」予測状態にある場合の各予測オフセットの第2車線変更利得を決定し、
オフセット選択モジュール13は、第2乗り物の予測譲り確率を決定し、予測譲り確率と、各予測オフセットの第1車線変更利得及び第2車線変更利得とに基づいて、各予測オフセットのターゲット車線変更利得を生成し、ターゲット車線変更利得が最大となる予測オフセットをターゲット予測オフセットとして決定し、ターゲット予測オフセットは、第1乗り物に対して予測された側方車線変更走行距離を示すためのものである。
車線の車線幅及び決定数を決定する決定取得ユニット111と、
第1乗り物と、第1乗り物が位置する第1車線の車線境界線との間の横方向の距離を決定し、車線幅、横方向の距離、及び決定数に基づいて、第1乗り物の少なくとも2つの予測オフセットを決定する決定生成ユニット112であって、少なくとも2つの予測オフセットの数が決定数である、決定生成ユニット112と、を含む。
第1乗り物が位置する第1車線を決定し、第1車線の中央線を座標縦軸とし、第1乗り物が座標縦軸上にマッピングされた点を座標原点とし、座標縦軸に対応する法線を座標横軸とし、座標原点、座標横軸、及び座標縦軸に基づいて、道路座標系を確立する座標確立モジュール14をさらに含み、
第1乗り物の第1走行状態、及び第2乗り物の第2走行状態を決定することについて、状態取得モジュール11は、
道路座標系における第1乗り物の第1位置情報を決定し、第1位置情報に基づいて第1乗り物の第1走行状態を決定する第1取得ユニット113と、
道路座標系における第2乗り物の第2位置情報を決定し、第2位置情報に基づいて第2乗り物の第2走行状態を決定する第2取得ユニット114と、を含む。
該利得取得モジュール12は、
第1位置情報に基づいて第1乗り物のオフセット距離を決定する距離決定ユニット121であって、オフセット距離は、第1乗り物と、第1乗り物が位置する第1車線の中央線との間の距離である、距離決定ユニット121と、
i番目(iは、少なくとも2つの予測オフセットの数以下の正の整数である)の予測オフセットを取得し、i番目の予測オフセットとオフセット距離との差に基づいて、第2乗り物が「譲る」予測状態にある場合のi番目の予測オフセットの第1車線変更利得を決定するとともに、第2乗り物が「譲らない」予測状態にある場合のi番目の予測オフセットの第2車線変更利得を決定する利得取得ユニット122と、を含む。
該利得取得モジュール12は、
第1位置情報における第1縦方向座標値と、第2位置情報における第2縦方向座標値とを取得し、第1縦方向座標値、第1走行速度、第2縦方向座標値、及び第2走行速度に基づいて、第1乗り物と第2乗り物の縦方向衝突時間を決定する時間取得ユニット123と、
第1位置情報における第1横方向座標値と、第2位置情報における第2横方向座標値とを取得し、i番目(iは、少なくとも2つの予測オフセットの数以下の正の整数である)の予測オフセットを取得し、第1横方向座標値、第2横方向座標値、及びi番目の予測オフセットに基づいて、i番目の予測オフセットに対応する交通側方間隔を決定する間隔取得ユニット124と、を含み、
該利得取得ユニット122は、さらに、縦方向衝突時間と、i番目の予測オフセットに対応する交通側方間隔とに基づいて、第2乗り物が「譲る」予測状態にある場合のi番目の予測オフセットの第1車線変更利得を決定するとともに、第2乗り物が「譲らない」予測状態にある場合のi番目の予測オフセットの第2車線変更利得を決定する。
該利得取得モジュール12は、
第3乗り物の第3位置情報を決定し、第2位置情報及び第3位置情報に基づいて、第2乗り物と第3乗り物との間の誘導縦方向距離を決定する車両取得ユニット125であって、第2乗り物は第3乗り物と同一の車線に位置し、第3乗り物と第2乗り物の走行方向は同じである、車両取得ユニット125と、
第3乗り物の第3走行速度を決定する速度取得ユニット126と、を含み、
該利得取得ユニット122は、さらに、i番目(iは、少なくとも2つの予測オフセットの数以下の正の整数である)の予測オフセット及び誘導縦方向距離に基づいて、第2乗り物のi番目の譲り距離を決定し、第2走行速度、第3走行速度、及びi番目の譲り距離に基づいて、第2乗り物が「譲る」予測状態にある場合のi番目の予測オフセットの第1車線変更利得を決定するとともに、第2乗り物が「譲らない」予測状態にある場合のi番目の予測オフセットの第2車線変更利得を決定する。
譲り確率モデルを取得するモジュール取得ユニット127と、
第1走行状態、第2走行状態、及びi番目(iは、少なくとも2つの予測オフセットの数以下の正の整数である)の予測オフセットを譲り確率モデルに入力することにより、i番目の予測オフセットに対応する「譲る」予測状態の確率及び「譲らない」予測状態の確率を取得する確率予測ユニット128と、を含み、
該利得取得ユニット122は、さらに、「譲る」予測状態の確率を、第2乗り物が「譲る」予測状態にある場合のi番目の予測オフセットの第1車線変更利得として決定し、
該利得取得ユニット122は、さらに、「譲らない」予測状態の確率を、第2乗り物が「譲らない」予測状態にある場合のi番目の予測オフセットの第2車線変更利得として決定する。
過去縦方向衝突時間と、過去縦方向衝突時間に対応する過去衝突距離とを取得し、過去縦方向衝突時間及び過去衝突距離に基づいて、衝突時間平均値及び衝突時間標準偏差を決定する衝突取得ユニット131と、
第2乗り物と第1乗り物の縦方向衝突時間を決定し、縦方向衝突時間を、衝突時間平均値及び衝突時間標準偏差から生成された第1確率密度関数にマッピングすることにより、第2乗り物の初期譲り確率を決定する第1確率取得ユニット132と、
過去交通側方間隔を取得し、過去交通側方間隔に基づいて、間隔平均値及び間隔標準偏差を決定する過去間隔取得ユニット133と、
第2乗り物と第1乗り物の交通側方間隔を取得し、交通側方間隔を、間隔平均値及び間隔標準偏差から生成された第2確率密度関数にマッピングすることにより、第2確率密度関数に基づいて第2乗り物の走行保持確率を決定する第2確率取得ユニット134と、
初期譲り確率及び走行保持確率に基づいて、第2乗り物の予測譲り確率を決定する譲り確率決定ユニット135と、を含む。
決定木を構築する木取得ユニット136であって、決定木における決定エッジは、少なくとも2つの予測オフセット、「譲る」予測状態、及び「譲らない」予測状態を含み、決定木における木ノードは、第1乗り物及び第2乗り物を含む、木取得ユニット136と、
決定木の少なくとも2つの決定層において、決定木のルートノードにおける各予測オフセットのツリー利得値が取得されるまで、階層毎に、予測譲り確率及び決定エッジに基づいて、各予測オフセットの第1車線変更利得及び第2車線変更利得を重み付け加算する利得反復ユニット137と、
ルートノードにおける各予測オフセットのツリー利得値を各予測オフセットのターゲット車線変更利得として決定する利得決定ユニット138と、を含む。
該利得取得モジュール12は、
第1実際走行状態及び第2実際走行状態に基づいて、第2乗り物が「譲る」予測状態にある場合の各予測オフセットの決定層k1における第1車線変更利得を決定するとともに、第2乗り物が「譲らない」予測状態にある場合の各予測オフセットの決定層k1における第2車線変更利得を決定する実際処理ユニット129aと、
第1実際走行状態に基づいて第1乗り物の第1予測走行状態を予測し、第2実際走行状態に基づいて第2乗り物の第2予測走行状態を予測する状態予測ユニット129bと、
第1予測走行状態及び第2予測走行状態に基づいて、第2乗り物が「譲る」予測状態にある場合の各予測オフセットの決定層k2における第1車線変更利得を決定するとともに、第2乗り物が「譲らない」予測状態にある場合の各予測オフセットの決定層k2における第2車線変更利得を決定する予測処理ユニット129cと、を含む。
該利得反復ユニット137は、
決定層k2における予測譲り確率に基づいて、各予測オフセットの決定層k2における第1車線変更利得及び第2車線変更利得を重み付け加算することにより、各予測オフセットの決定層k2におけるツリー利得値を取得する層利得取得サブユニット1371と、
各予測オフセットの決定層k2におけるツリー利得値のうちの最大のツリー利得値を決定層k2のパラメータ値として決定するパラメータ決定サブユニット1372と、含み、
該層利得取得サブユニット1371は、さらに、決定層k1における予測譲り確率に基づいて、決定層k2のパラメータ値、各予測オフセットの決定層k1における第1車線変更利得及び第2車線変更利得を重み付け加算することにより、各予測オフセットの決定層k1におけるツリー利得値を取得し、各予測オフセットの決定層k1におけるツリー利得値は、決定木のルートノードにおける各予測オフセットのツリー利得値である。
ターゲット予測オフセットに基づいて予測オフセット軌跡を決定する軌跡決定モジュール15であって、車線における予測オフセット軌跡に対応する側方走行距離は、ターゲット予測オフセットである、軌跡決定モジュール15と、
予測オフセット軌跡に沿って走行するように第1乗り物を制御する走行制御モジュール16と、をさらに含む。
第1乗り物の少なくとも2つの予測オフセット、第1乗り物の第1走行状態、及び第2乗り物の第2走行状態を決定するステップであって、第2乗り物は、第1乗り物が車線を変更する際に参照する乗り物である、ステップと、
第1走行状態及び第2走行状態に基づいて、第2乗り物が「譲る」予測状態にある場合の各予測オフセットの第1車線変更利得を決定するとともに、第2乗り物が「譲らない」予測状態にある場合の各予測オフセットの第2車線変更利得を決定するステップと、
第2乗り物の予測譲り確率を決定し、予測譲り確率と、各予測オフセットの第1車線変更利得及び第2車線変更利得とに基づいて、各予測オフセットのターゲット車線変更利得を生成し、ターゲット車線変更利得が最大となる予測オフセットをターゲット予測オフセットとして決定するステップであって、ターゲット予測オフセットは、第1乗り物に対して予測された側方車線変更走行距離を示すためのものである、ステップと、を実行する。
102 乗り物
Claims (15)
- 乗り物に基づくデータ処理方法であって、
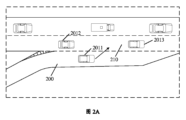
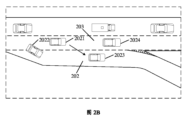
第1車線を走行する第1乗り物の少なくとも2つの予測オフセット、前記第1乗り物の第1走行状態、及び前記第1車線と異なる第2車線を走行する第2乗り物の第2走行状態を決定するステップであって、前記第2乗り物は、前記第1乗り物が車線を変更する際に参照する乗り物である、ステップと、
前記第1走行状態及び前記第2走行状態に基づいて、前記少なくとも2つの予測オフセットの中のそれぞれの予測オフセットについて、前記第2乗り物が「譲る」予測状態にある場合の第1車線変更利得を決定するとともに、前記第2乗り物が「譲らない」予測状態にある場合の第2車線変更利得を決定するステップであって、前記第1車線変更利得および前記第2車線変更利得のそれぞれは、前記少なくとも2つの予測オフセットそれぞれに対応する少なくとも2つの利得パラメータに基づいて決定され、前記少なくとも2つの利得パラメータのそれぞれは、前記少なくとも2つの利得パラメータのそれぞれに対応する車線変更において求められる要件を満たすために予め規定された計算式に基づいて計算される、ステップと、
前記第2乗り物の予測譲り確率を決定し、前記予測譲り確率と、前記各予測オフセットの前記第1車線変更利得及び前記第2車線変更利得とに基づいて、前記各予測オフセットのターゲット車線変更利得を生成し、ターゲット車線変更利得が最大となる予測オフセットをターゲット予測オフセットとして決定するステップであって、前記各予測オフセットの前記ターゲット車線変更利得は、前記各予測オフセットにより第1乗り物に対してもたらされる利得を示し、前記ターゲット予測オフセットは、前記第1乗り物に対して予測された車線変更走行距離の側方成分を示すためのものである、ステップと、
を含むことを特徴とする方法。 - 前記第1乗り物の少なくとも2つの予測オフセットを決定することは、
前記車線の車線幅を決定するステップと、
前記第1乗り物と、前記第1乗り物が位置する第1車線の車線境界線との間の横方向の距離を決定し、前記車線幅、及び前記横方向の距離に基づいて、前記第1乗り物の少なくとも2つの予測オフセットを決定するステップと、を含む、
ことを特徴とする請求項1に記載の方法。 - 前記第1乗り物が位置する第1車線を決定し、前記第1車線の中央線を座標縦軸とし、前記第1乗り物が前記座標縦軸上にマッピングされた点を座標原点とし、前記座標縦軸に対応する法線を座標横軸とし、前記座標原点、前記座標横軸、及び前記座標縦軸に基づいて、道路座標系を確立するステップをさらに含み、
前記第1乗り物の第1走行状態、及び第2乗り物の第2走行状態を決定することは、
前記道路座標系における前記第1乗り物の第1位置情報を決定し、前記第1位置情報に基づいて前記第1乗り物の第1走行状態を決定するステップと、
前記道路座標系における前記第2乗り物の第2位置情報を決定し、前記第2位置情報に基づいて前記第2乗り物の第2走行状態を決定するステップと、を含む、
ことを特徴とする請求項1乃至2のいずれか1項に記載の方法。 - 前記第1走行状態は第1位置情報を含み、前記第2走行状態は第2位置情報を含み、
前記第1走行状態及び前記第2走行状態に基づいて、前記第2乗り物が「譲る」予測状態にある場合の各予測オフセットの第1車線変更利得を決定するとともに、前記第2乗り物が「譲らない」予測状態にある場合の前記各予測オフセットの第2車線変更利得を決定する前記ステップは、
前記第1位置情報に基づいて前記第1乗り物のオフセット距離を決定するステップであって、前記オフセット距離は、前記第1乗り物と、前記第1乗り物が位置する第1車線の中央線との間の距離である、ステップと、
前記少なくとも2つの予測オフセットの中から、i番目(iは、前記少なくとも2つの予測オフセットの数以下の正の整数である)の予測オフセットを取得し、前記i番目の予測オフセットと前記オフセット距離との差に基づいて、前記第2乗り物が「譲る」予測状態にある場合の前記i番目の予測オフセットの第1車線変更利得を決定するとともに、前記第2乗り物が「譲らない」予測状態にある場合の前記i番目の予測オフセットの第2車線変更利得を決定するステップと、を含む、
ことを特徴とする請求項1に記載の方法。 - 前記第1走行状態は第1位置情報及び第1走行速度を含み、前記第2走行状態は第2位置情報及び第2走行速度を含み、
前記第1走行状態及び前記第2走行状態に基づいて、前記第2乗り物が「譲る」予測状態にある場合の各予測オフセットの第1車線変更利得を決定するとともに、前記第2乗り物が「譲らない」予測状態にある場合の前記各予測オフセットの第2車線変更利得を決定する前記ステップは、
前記第1位置情報における第1縦方向座標値と、前記第2位置情報における第2縦方向座標値とを取得し、前記第1縦方向座標値、前記第1走行速度、前記第2縦方向座標値、及び前記第2走行速度に基づいて、前記第1乗り物と前記第2乗り物の縦方向衝突時間を決定するステップと、
前記第1位置情報における第1横方向座標値と、前記第2位置情報における第2横方向座標値とを取得し、i番目(iは、前記少なくとも2つの予測オフセットの数以下の正の整数である)の予測オフセットを取得し、前記第1横方向座標値、前記第2横方向座標値、及び前記i番目の予測オフセットに基づいて、前記i番目の予測オフセットに対応する交通側方間隔を決定するステップであって、前記交通側方間隔は、前記第1乗り物と前記第2乗り物との間の横方向距離を示す、ステップと、
前記縦方向衝突時間と、前記i番目の予測オフセットに対応する交通側方間隔とに基づいて、前記第2乗り物が「譲る」予測状態にある場合の前記i番目の予測オフセットの第1車線変更利得を決定するとともに、前記第2乗り物が「譲らない」予測状態にある場合の前記i番目の予測オフセットの第2車線変更利得を決定するステップと、を含む、
ことを特徴とする請求項1に記載の方法。 - 前記第1走行状態は第1位置情報及び第1走行速度を含み、前記第2走行状態は第2位置情報及び第2走行速度を含み、
前記第1走行状態及び前記第2走行状態に基づいて、前記第2乗り物が「譲る」予測状態にある場合の各予測オフセットの第1車線変更利得を決定するとともに、前記第2乗り物が「譲らない」予測状態にある場合の前記各予測オフセットの第2車線変更利得を決定するステップは、
第3乗り物の第3位置情報を決定し、前記第2位置情報及び前記第3位置情報に基づいて、前記第2乗り物と前記第3乗り物との間の距離である誘導縦方向距離を決定するステップであって、前記第2乗り物は前記第3乗り物と同一の車線に位置し、前記第3乗り物と前記第2乗り物の走行方向は同じである、ステップと、
前記第3乗り物の第3走行速度を決定するステップと、
i番目(iは、前記少なくとも2つの予測オフセットの数以下の正の整数である)の予測オフセット及び前記誘導縦方向距離に基づいて、前記第2乗り物のi番目の譲り距離を決定し、前記第2走行速度、前記第3走行速度、及び前記i番目の譲り距離に基づいて、前記第2乗り物が「譲る」予測状態にある場合の前記i番目の予測オフセットの第1車線変更利得を決定するとともに、前記第2乗り物が「譲らない」予測状態にある場合の前記i番目の予測オフセットの第2車線変更利得を決定するステップであって、前記i番目の譲り距離は、i番目の予測オフセットでかつ前記第2乗り物が前記「譲る」予測状態にある場合、前記誘導縦方向距離と、所定の測定期間経過後の前記誘導縦方向距離との差分を指す、ステップと、を含む、
ことを特徴とする請求項1に記載の方法。 - 前記第1走行状態及び前記第2走行状態に基づいて、前記第2乗り物が「譲る」予測状態にある場合の各予測オフセットの第1車線変更利得を決定するとともに、前記第2乗り物が「譲らない」予測状態にある場合の前記各予測オフセットの第2車線変更利得を決定する前記ステップは、
譲り確率モデルを取得するステップと、
前記第1走行状態、前記第2走行状態、及びi番目(iは、前記少なくとも2つの予測オフセットの数以下の正の整数である)の予測オフセットを、前記譲り確率モデルに入力することにより、前記i番目の予測オフセットに対応する前記「譲る」予測状態の確率及び前記「譲らない」予測状態の確率を取得するステップと、
前記「譲る」予測状態の確率を、前記第2乗り物が前記「譲る」予測状態にある場合の前記i番目の予測オフセットの第1車線変更利得として決定するステップと、
前記「譲らない」予測状態の確率を、前記第2乗り物が前記「譲らない」予測状態にある場合の前記i番目の予測オフセットの第2車線変更利得として決定するステップと、を含む、
ことを特徴とする請求項1に記載の方法。 - 前記第2乗り物の予測譲り確率を決定することは、
過去縦方向衝突時間と、前記過去縦方向衝突時間に対応する過去衝突距離とを取得し、前記過去縦方向衝突時間及び前記過去衝突距離に基づいて、衝突時間平均値及び衝突時間標準偏差を決定するステップと、
前記第2乗り物と前記第1乗り物の縦方向衝突時間を決定し、前記縦方向衝突時間を、前記衝突時間平均値及び前記衝突時間標準偏差から生成された第1確率密度関数にマッピングすることにより、前記第1確率密度関数に基づいて前記第2乗り物の初期譲り確率を決定するステップと、
過去交通側方間隔を取得し、前記過去交通側方間隔に基づいて、間隔平均値及び間隔標準偏差を決定するステップと、
前記第2乗り物と前記第1乗り物の交通側方間隔を決定し、前記交通側方間隔を、前記間隔平均値及び前記間隔標準偏差から生成された第2確率密度関数にマッピングすることにより、前記第2確率密度関数に基づいて前記第2乗り物の走行保持確率を決定するステップと、
前記初期譲り確率及び前記走行保持確率に基づいて、前記第2乗り物の予測譲り確率を決定するステップと、を含む、
ことを特徴とする請求項1に記載の方法。 - 前記予測譲り確率と、前記各予測オフセットの前記第1車線変更利得及び前記第2車線変更利得とに基づいて、前記各予測オフセットのターゲット車線変更利得を生成することは、
決定木を構築するステップであって、前記決定木における決定エッジは、前記少なくとも2つの予測オフセット、前記「譲る」予測状態、及び前記「譲らない」予測状態を含み、前記決定木における木ノードは、前記第1乗り物及び前記第2乗り物を含む、ステップと、
前記決定木の少なくとも2つの決定層において、前記決定木のルートノードにおける前記各予測オフセットのツリー利得値が取得されるまで、階層毎に、前記予測譲り確率及び前記決定エッジに基づいて、前記各予測オフセットの前記第1車線変更利得及び前記第2車線変更利得を重み付け加算するステップと、
前記ルートノードにおける前記各予測オフセットのツリー利得値を、前記各予測オフセットのターゲット車線変更利得として決定するステップと、を含む、
ことを特徴とする請求項1に記載の方法。 - 前記決定木における少なくとも2つの決定層は、決定層k1及び決定層k2を含み、前記決定層k1は前記ルートノードを含み、前記第1走行状態は第1実際走行状態及び第1予測走行状態を含み、前記第2走行状態は第2実際走行状態及び第2予測走行状態を含み、前記第1車線変更利得は、決定層k1における第1車線変更利得と、決定層k2における第1車線変更利得とを含み、前記第2車線変更利得は、決定層k1における第2車線変更利得と、決定層k2における第2車線変更利得とを含み、
前記第1走行状態及び前記第2走行状態に基づいて、前記第2乗り物が「譲る」予測状態にある場合の各予測オフセットの第1車線変更利得を決定するとともに、前記第2乗り物が「譲らない」予測状態にある場合の前記各予測オフセットの第2車線変更利得を決定する前記ステップは、
前記第1実際走行状態及び前記第2実際走行状態に基づいて、前記第2乗り物が「譲る」予測状態にある場合の各予測オフセットの決定層k1における前記第1車線変更利得を決定するとともに、前記第2乗り物が「譲らない」予測状態にある場合の前記各予測オフセットの決定層k1における第2車線変更利得を決定するステップと、
前記第1実際走行状態に基づいて前記第1乗り物の前記第1予測走行状態を予測し、前記第2実際走行状態に基づいて前記第2乗り物の前記第2予測走行状態を予測するステップと、
前記第1予測走行状態及び前記第2予測走行状態に基づいて、前記第2乗り物が前記「譲る」予測状態にある場合の前記各予測オフセットの決定層k2における前記第1車線変更利得を決定するとともに、前記第2乗り物が前記「譲らない」予測状態にある場合の前記各予測オフセットの決定層k2における前記第2車線変更利得を決定するステップと、を含む、
ことを特徴とする請求項9に記載の方法。 - 前記予測譲り確率は、決定層k1における予測譲り確率と、決定層k2における予測譲り確率とを含み、
前記決定木の少なくとも2つの決定層において、前記決定木のルートノードにおける前記各予測オフセットのツリー利得値が取得されるまで、階層毎に、前記予測譲り確率及び前記決定エッジに基づいて、前記各予測オフセットの前記第1車線変更利得及び前記第2車線変更利得を重み付け加算する前記ステップは、
決定層k2における前記予測譲り確率に基づいて、前記各予測オフセットの決定層k2における前記第1車線変更利得及び前記第2車線変更利得を重み付け加算することにより、前記各予測オフセットの前記決定層k2におけるツリー利得値を取得するステップと、
前記各予測オフセットの前記決定層k2におけるツリー利得値のうちの最大のツリー利得値を、前記決定層k2のパラメータ値として決定するステップと、
前記決定層k1における予測譲り確率に基づいて、前記決定層k2のパラメータ値、前記各予測オフセットの決定層k1における前記第1車線変更利得及び前記第2車線変更利得を重み付け加算することにより、前記各予測オフセットの前記決定層k1におけるツリー利得値を取得するステップであって、前記各予測オフセットの前記決定層k1におけるツリー利得値は、前記決定木のルートノードにおける前記各予測オフセットのツリー利得値である、ステップと、を含む、
ことを特徴とする請求項10に記載の方法。 - 前記ターゲット予測オフセットと、前記第2乗り物が位置する第2車線とに基づいて、予測オフセット軌跡を決定するステップであって、前記第1車線及び/又は前記第2車線における、前記予測オフセット軌跡に対応する走行距離の側方成分は、前記ターゲット予測オフセットである、ステップと、
前記予測オフセット軌跡に沿って走行するように前記第1乗り物を制御するステップと、
をさらに含むことを特徴とする請求項1に記載の方法。 - 乗り物に基づくデータ処理装置であって、
第1車線を走行する第1乗り物の少なくとも2つの予測オフセット、前記第1乗り物の第1走行状態、及び前記第1車線と異なる第2車線を走行する第2乗り物の第2走行状態を決定する状態取得モジュールであって、前記第2乗り物は、前記第1乗り物が車線を変更する際に参照する乗り物である、状態取得モジュールと、
前記第1走行状態及び前記第2走行状態に基づいて、前記少なくとも2つの予測オフセットの中のそれぞれの予測オフセットについて、前記第2乗り物が「譲る」予測状態にある場合の第1車線変更利得を決定するとともに、前記第2乗り物が「譲らない」予測状態にある場合の第2車線変更利得を決定する利得取得モジュールであって、前記第1車線変更利得および前記第2車線変更利得のそれぞれは、前記少なくとも2つの予測オフセットそれぞれに対応する少なくとも2つの利得パラメータに基づいて決定され、前記少なくとも2つの利得パラメータのそれぞれは、前記少なくとも2つの利得パラメータのそれぞれに対応する車線変更において求められる要件を満たすために予め規定された計算式に基づいて計算される、利得取得モジュールと、
前記第2乗り物の予測譲り確率を決定し、前記予測譲り確率と、前記各予測オフセットの前記第1車線変更利得及び前記第2車線変更利得とに基づいて、前記各予測オフセットのターゲット車線変更利得を生成し、ターゲット車線変更利得が最大となる予測オフセットをターゲット予測オフセットとして決定するオフセット選択モジュールであって、前記各予測オフセットの前記ターゲット車線変更利得は、前記各予測オフセットにより第1乗り物に対してもたらされる利得を示し、前記ターゲット予測オフセットは、前記第1乗り物に対して予測された車線変更走行距離の側方成分を示すためのものである、オフセット選択モジュールと、
を含むことを特徴とする装置。 - コンピュータ機器であって、プロセッサと、メモリと、入出力インタフェースと、を備え、前記プロセッサは、前記メモリ及び前記入出力インタフェースにそれぞれ接続され、前記入出力インタフェースは、データを受信して、データを出力し、前記メモリは、コンピュータプログラムを記憶し、前記プロセッサは、前記コンピュータプログラムを呼び出すことにより、請求項1乃至12のいずれか1項に記載の方法を実行する、
ことを特徴とするコンピュータ機器。 - 請求項1乃至12のいずれか1項に記載の方法をコンピュータに実行させることを特徴とするコンピュータプログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010947834.9A CN112406905B (zh) | 2020-09-10 | 2020-09-10 | 基于交通工具的数据处理方法、装置、计算机及存储介质 |
| CN202010947834.9 | 2020-09-10 | ||
| PCT/CN2021/116193 WO2022052856A1 (zh) | 2020-09-10 | 2021-09-02 | 基于交通工具的数据处理方法、装置、计算机及存储介质 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023523350A JP2023523350A (ja) | 2023-06-02 |
| JP7520444B2 true JP7520444B2 (ja) | 2024-07-23 |
Family
ID=74855176
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022565903A Active JP7520444B2 (ja) | 2020-09-10 | 2021-09-02 | 乗り物に基づくデータ処理方法、データ処理装置、コンピュータ機器、及びコンピュータプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12351210B2 (ja) |
| EP (1) | EP4119412B1 (ja) |
| JP (1) | JP7520444B2 (ja) |
| CN (1) | CN112406905B (ja) |
| WO (1) | WO2022052856A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102020002993B4 (de) * | 2020-05-19 | 2022-11-10 | Mercedes-Benz Group AG | Verfahren zur Unterstützung eines Fahrzeuges |
| CN112406905B (zh) * | 2020-09-10 | 2022-01-28 | 腾讯科技(深圳)有限公司 | 基于交通工具的数据处理方法、装置、计算机及存储介质 |
| JP7355057B2 (ja) * | 2021-03-24 | 2023-10-03 | 株式会社デンソー | 車両用制御装置及び車両用制御方法 |
| US12497028B1 (en) * | 2021-05-23 | 2025-12-16 | Zoox, Inc. | Autonomous vehicle fault injection testing |
| DE112021007948T5 (de) * | 2021-07-09 | 2024-06-20 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | System und Verfahren zur Einscher- und/oder Spurwechselvorhersage in einem Fahrzeug |
| JP7822852B2 (ja) * | 2022-03-29 | 2026-03-03 | 本田技研工業株式会社 | 行動計画生成装置 |
| CN115112140A (zh) * | 2022-05-30 | 2022-09-27 | 北京地平线机器人技术研发有限公司 | 车辆的路径规划方法、装置、电子设备和存储介质 |
| US20240051581A1 (en) * | 2022-08-15 | 2024-02-15 | Motional Ad Llc | Determination of an action for an autonomous vehicle in the presence of intelligent agents |
| US12187324B2 (en) * | 2022-08-31 | 2025-01-07 | Zoox, Inc. | Trajectory prediction based on a decision tree |
| JP7788979B2 (ja) * | 2022-09-21 | 2025-12-19 | 本田技研工業株式会社 | 推定装置、推定方法、およびプログラム |
| CN115597619B (zh) * | 2022-09-30 | 2026-04-14 | 阿波罗智能技术(北京)有限公司 | 车辆的路径规划方法、装置、电子设备及自动驾驶车辆 |
| US20240217549A1 (en) * | 2022-12-29 | 2024-07-04 | Qualcomm Incorporated | Forward simulation for decision-making for device operation |
| US20240246569A1 (en) * | 2023-01-23 | 2024-07-25 | Gm Cruise Holdings Llc | Trajectory prediction through semantic interaction |
| US12472981B2 (en) * | 2023-06-30 | 2025-11-18 | Mitsubishi Electric Research Laboratories, Inc. | Systems and methods for decision making for autonomous vehicles |
| CN116729374B (zh) * | 2023-08-16 | 2023-11-10 | 北京斯年智驾科技有限公司 | 一种自动驾驶车道保持控制方法、系统、装置和存储介质 |
| CN118735399B (zh) * | 2024-06-20 | 2025-04-15 | 上海红箭自动化设备有限公司 | 一种散货卸料车的路径优化方法及系统 |
| CN119590445B (zh) * | 2024-10-29 | 2025-10-24 | 清华大学 | 基于车云协同的行驶轨迹规划方法及装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019206377A1 (de) | 2018-04-24 | 2019-10-31 | Robert Bosch Gmbh | Verfahren und vorrichtung zum kooperativen abstimmen von zukünftigen fahrmanövern eines fahrzeugs mit fremdmanövern zumindest eines fremdfahrzeugs |
| WO2020003578A1 (en) | 2018-06-24 | 2020-01-02 | Mitsubishi Electric Corporation | Control system of vehicle and control method for controlling motion of vehicle |
| CN110910663A (zh) | 2019-10-16 | 2020-03-24 | 清华大学 | 一种车路协同环境下多智能车交叉口通行协调控制方法 |
| JP2022527072A (ja) | 2019-03-25 | 2022-05-30 | ズークス インコーポレイテッド | 属性に基づく歩行者の予測 |
| JP2022544715A (ja) | 2019-08-23 | 2022-10-20 | ズークス インコーポレイテッド | 譲歩挙動のモデリングおよび予測 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8788134B1 (en) * | 2013-01-04 | 2014-07-22 | GM Global Technology Operations LLC | Autonomous driving merge management system |
| EP3181420B1 (en) * | 2014-08-11 | 2018-12-19 | Nissan Motor Co., Ltd | Travel control device and method for vehicle |
| EP3208786B1 (en) * | 2016-02-22 | 2023-06-07 | Volvo Car Corporation | Method and system for evaluating inter-vehicle traffic gaps and time instances to perform a lane change manoeuvre |
| CN108313054B (zh) * | 2018-01-05 | 2019-08-02 | 北京智行者科技有限公司 | 自动驾驶自主换道决策方法和装置及自动驾驶车辆 |
| JP6629897B2 (ja) * | 2018-02-26 | 2020-01-15 | 本田技研工業株式会社 | 車両制御装置 |
| CN108595823B (zh) * | 2018-04-20 | 2021-10-12 | 大连理工大学 | 一种联合驾驶风格和博弈理论的自主车换道策略计算方法 |
| JP6710722B2 (ja) * | 2018-06-15 | 2020-06-17 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| CN111383464B (zh) * | 2018-12-28 | 2022-11-18 | 沈阳美行科技股份有限公司 | 车辆变道识别方法、装置、电子设备和介质 |
| CN109739246B (zh) * | 2019-02-19 | 2022-10-11 | 阿波罗智能技术(北京)有限公司 | 一种变换车道过程中的决策方法、装置、设备及存储介质 |
| CN109949611B (zh) * | 2019-03-28 | 2021-11-30 | 阿波罗智能技术(北京)有限公司 | 无人车的变道方法、装置及存储介质 |
| CN110136254B (zh) * | 2019-06-13 | 2019-12-13 | 吉林大学 | 基于动态概率驾驶地图的驾驶辅助信息显示方法 |
| CN110298131B (zh) * | 2019-07-05 | 2021-07-13 | 西南交通大学 | 一种混合驾驶环境下自动驾驶换道决策模型建立方法 |
| CN110908375A (zh) * | 2019-11-14 | 2020-03-24 | 北京三快在线科技有限公司 | 获取变道决策信息的方法、装置、存储介质和车辆 |
| CN111169476B (zh) * | 2020-01-18 | 2021-09-03 | 重庆长安汽车股份有限公司 | 一种运动趋势预测方法、装置、控制器及汽车 |
| CN111428943B (zh) * | 2020-04-23 | 2021-08-03 | 福瑞泰克智能系统有限公司 | 障碍物车辆轨迹预测的方法、设备和计算机设备 |
| US11814075B2 (en) * | 2020-08-26 | 2023-11-14 | Motional Ad Llc | Conditional motion predictions |
| CN112406905B (zh) * | 2020-09-10 | 2022-01-28 | 腾讯科技(深圳)有限公司 | 基于交通工具的数据处理方法、装置、计算机及存储介质 |
-
2020
- 2020-09-10 CN CN202010947834.9A patent/CN112406905B/zh active Active
-
2021
- 2021-09-02 JP JP2022565903A patent/JP7520444B2/ja active Active
- 2021-09-02 WO PCT/CN2021/116193 patent/WO2022052856A1/zh not_active Ceased
- 2021-09-02 EP EP21865910.0A patent/EP4119412B1/en active Active
-
2022
- 2022-10-21 US US17/971,495 patent/US12351210B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019206377A1 (de) | 2018-04-24 | 2019-10-31 | Robert Bosch Gmbh | Verfahren und vorrichtung zum kooperativen abstimmen von zukünftigen fahrmanövern eines fahrzeugs mit fremdmanövern zumindest eines fremdfahrzeugs |
| WO2020003578A1 (en) | 2018-06-24 | 2020-01-02 | Mitsubishi Electric Corporation | Control system of vehicle and control method for controlling motion of vehicle |
| JP2022527072A (ja) | 2019-03-25 | 2022-05-30 | ズークス インコーポレイテッド | 属性に基づく歩行者の予測 |
| JP2022544715A (ja) | 2019-08-23 | 2022-10-20 | ズークス インコーポレイテッド | 譲歩挙動のモデリングおよび予測 |
| CN110910663A (zh) | 2019-10-16 | 2020-03-24 | 清华大学 | 一种车路协同环境下多智能车交叉口通行协调控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4119412A1 (en) | 2023-01-18 |
| US20230053459A1 (en) | 2023-02-23 |
| CN112406905B (zh) | 2022-01-28 |
| JP2023523350A (ja) | 2023-06-02 |
| US12351210B2 (en) | 2025-07-08 |
| WO2022052856A1 (zh) | 2022-03-17 |
| CN112406905A (zh) | 2021-02-26 |
| EP4119412A4 (en) | 2023-10-11 |
| EP4119412B1 (en) | 2024-12-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7520444B2 (ja) | 乗り物に基づくデータ処理方法、データ処理装置、コンピュータ機器、及びコンピュータプログラム | |
| CN112888612B (zh) | 自动驾驶车辆规划 | |
| US20230124864A1 (en) | Graph Representation Querying of Machine Learning Models for Traffic or Safety Rules | |
| Siboo et al. | An empirical study of DDPG and PPO-based reinforcement learning algorithms for autonomous driving | |
| US20240092398A1 (en) | Trajectory prediction based on a decision tree | |
| CN110268457B (zh) | 用于确定至少两个车辆的集体操纵的方法、计算机程序产品、计算机能读取的介质、控制器和包括该控制器的车辆 | |
| WO2021073781A9 (en) | Prediction and planning for mobile robots | |
| WO2023135271A1 (en) | Motion prediction and trajectory generation for mobile agents | |
| CN108628298A (zh) | 用于自动驾驶车辆的控制型规划和控制系统 | |
| KR20230024392A (ko) | 주행 의사 결정 방법 및 장치 및 칩 | |
| JP2023153041A (ja) | 動的環境のための支援システム | |
| CN114620058A (zh) | 轨迹规划方法、装置、计算设备、移动体以及存储介质 | |
| WO2025072266A1 (en) | Trajectory planning based on tree search expansion | |
| Widyotriatmo et al. | Autonomous vehicle lane-change maneuver accounting for emotion-induced driving behavior in other vehicles | |
| US20250206342A1 (en) | Trajectory planning based on tree search expansion | |
| CN114148344A (zh) | 一种车辆行为预测方法、装置及车辆 | |
| US20250225051A1 (en) | Simulation-based testing for robotic systems | |
| Gong et al. | Intuitive decision-making modeling for self-driving vehicles | |
| Nakaya et al. | Exploration of deep reinforcement learning method for cooperative control of connected automated vehicles at a roundabout | |
| Li et al. | A Driving Behavior Decision Method Based on Gradient Boosting Tree Algorithm | |
| HK40038330B (en) | Method and device for processing vehicle-based data, computer and storage medium | |
| HK40038330A (en) | Method and device for processing vehicle-based data, computer and storage medium | |
| US20250100583A1 (en) | Systems and methods for generating ego vehicle driver-based guidance | |
| Yu et al. | MODUS: An Impact-Aware Decision Framework with Adaptive Fusion for Connected Autonomous Vehicles | |
| Ramachandran | Investigation of unmanned ground vehicle obstacles avoidance model |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221027 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221027 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231211 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240311 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240510 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240610 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240704 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7520444 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |