JP7522713B2 - 運転支援装置 - Google Patents
運転支援装置 Download PDFInfo
- Publication number
- JP7522713B2 JP7522713B2 JP2021185412A JP2021185412A JP7522713B2 JP 7522713 B2 JP7522713 B2 JP 7522713B2 JP 2021185412 A JP2021185412 A JP 2021185412A JP 2021185412 A JP2021185412 A JP 2021185412A JP 7522713 B2 JP7522713 B2 JP 7522713B2
- Authority
- JP
- Japan
- Prior art keywords
- information
- unit
- vehicle
- remaining time
- intersection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18154—Approaching an intersection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18159—Traversing an intersection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/04—Traffic conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/095—Traffic lights
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/096—Arrangements for giving variable traffic instructions provided with indicators in which a mark progresses showing the time elapsed, e.g. of green phase
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/09623—Systems involving the acquisition of information from passive traffic signs by means mounted on the vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
- G08G1/096716—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control where the received information does not generate an automatic action on the vehicle control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096733—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place
- G08G1/096758—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place where no selection takes place on the transmitted or the received information
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096766—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission
- G08G1/096783—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission where the origin of the information is a roadside individual element
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H04W4/44—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P] for communication between vehicles and infrastructures, e.g. vehicle-to-cloud [V2C] or vehicle-to-home [V2H]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/06—Direction of travel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/20—Direction indicator values
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/20—Static objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/60—Traffic rules, e.g. speed limits or right of way
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/07—Controlling traffic signals
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Signal Processing (AREA)
- Human Computer Interaction (AREA)
- Computer Networks & Wireless Communication (AREA)
- Mathematical Physics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Traffic Control Systems (AREA)
Description
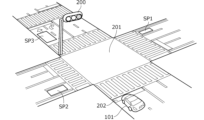
(1)運転支援装置100は、交差点201に設置されて停止命令を示す赤信号と進行可能を示す青信号とに切換可能に構成された信号機200が切り換わるまでの残り時間の情報を含む信号機情報を取得する情報取得部21と、情報取得部21により取得された信号機情報に基づいて、信号機200が赤信号から青信号へ切り換わる切換情報を自車両101のドライバに対し報知する表示装置1と、自車両101の周囲状況を検出する外界センサ4と、外界センサ4により検出された周囲状況に基づいて、交差点201を通過後の領域に自車両101が移動可能な移動スペースSP1~SP3が存在するか否かを判定する移動判定部24と、を備える(図4)。表示装置1は、移動判定部24により移動スペースSP1~SP3が存在しないと判定されると、切換情報とともに警告情報を表示する(図7)。
Claims (4)
- 交差点に設置されて停止命令を示す第1態様と進行可能を示す第2態様とに少なくとも切換可能に構成された交通信号機が切り換わるまでの残り時間の情報を含む信号機情報を取得する情報取得部と、
前記情報取得部により取得された信号機情報に基づいて、前記交通信号機が前記第1態様から前記第2態様へ切り換わる切換情報を自車両のドライバに対し報知する報知部と、
自車両の周囲状況を検出する検出部と、
前記検出部により検出された周囲状況に基づいて、前記交差点を通過後の領域に自車両が移動可能な移動スペースが存在するか否かを判定する判定部と、を備え、
前記報知部は、前記切換情報に含まれる前記第1態様の残時間の情報を表示する表示部を有し、前記残時間の情報を表示中に前記残時間が所定時間以内になったときに前記判定部により前記移動スペースが存在しないと判定されると、前記残時間の情報とともに警告情報を前記表示部に表示することを特徴とする運転支援装置。 - 請求項1に記載の運転支援装置において、
自車両が前記交差点を通過する前に、前記交差点を通過後の自車両の進行方向を推定する推定部をさらに備え、
前記判定部は、前記推定部により推定された進行方向に、前記移動スペースが存在するか否かを判定することを特徴とする運転支援装置。 - 請求項1または2に記載の運転支援装置において、
前記報知部は、前記残時間の情報を表示中に前記残時間が前記所定時間以内になったときに前記判定部により前記移動スペースが存在しないと判定されると、前記警告情報を前記残時間の情報に重ねて前記表示部に表示することを特徴とする運転支援装置。 - 請求項1~3のいずれか1項に記載の運転支援装置において、
前記報知部は、前記切換情報を音声で出力する音声出力部を有することを特徴とする運転支援装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021185412A JP7522713B2 (ja) | 2021-11-15 | 2021-11-15 | 運転支援装置 |
| CN202211386254.2A CN116129666A (zh) | 2021-11-15 | 2022-11-07 | 驾驶辅助装置 |
| US17/983,195 US20230154325A1 (en) | 2021-11-15 | 2022-11-08 | Driving assistance apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021185412A JP7522713B2 (ja) | 2021-11-15 | 2021-11-15 | 運転支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023072771A JP2023072771A (ja) | 2023-05-25 |
| JP7522713B2 true JP7522713B2 (ja) | 2024-07-25 |
Family
ID=86306915
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021185412A Active JP7522713B2 (ja) | 2021-11-15 | 2021-11-15 | 運転支援装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20230154325A1 (ja) |
| JP (1) | JP7522713B2 (ja) |
| CN (1) | CN116129666A (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240083634A (ko) * | 2022-12-05 | 2024-06-12 | 현대자동차주식회사 | 차량 제어 장치 및 그 방법 |
| FR3155492A1 (fr) * | 2023-11-21 | 2025-05-23 | Renault S.A.S | Système d’adaptation de l’ambiance intérieure et/ou de la conduite d’un véhicule |
| JP2025098867A (ja) * | 2023-12-20 | 2025-07-02 | 株式会社Subaru | 車両 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005165643A (ja) | 2003-12-02 | 2005-06-23 | Fujitsu Ten Ltd | 運転支援装置 |
| JP2013041624A (ja) | 2012-11-09 | 2013-02-28 | Toyota Motor Corp | 運転支援装置及び方法 |
| JP2014096168A (ja) | 2014-01-06 | 2014-05-22 | Toyota Motor Corp | 運転支援装置 |
| US20170301237A1 (en) | 2016-04-18 | 2017-10-19 | Ford Global Technologies, Llc | Systems and methods for intersection assistance using dedicated short range communications |
| WO2018074426A1 (ja) | 2016-10-21 | 2018-04-26 | 株式会社デンソー | センサ制御装置 |
| WO2019146052A1 (ja) | 2018-01-25 | 2019-08-01 | 日産自動車株式会社 | 自動運転車両の制御方法および制御装置 |
| JP2020046745A (ja) | 2018-09-14 | 2020-03-26 | 株式会社デンソーテン | 運転支援装置及び運転支援方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010230561A (ja) * | 2009-03-27 | 2010-10-14 | Adc Technology Inc | 車載装置 |
| CN101853577A (zh) * | 2009-03-31 | 2010-10-06 | 上海意旦尔信息科技有限公司 | 一种车用道路路口信息显示系统 |
| JP5423778B2 (ja) * | 2011-01-14 | 2014-02-19 | 株式会社デンソー | 車載機及び障害物報知システム |
| CN206773940U (zh) * | 2016-12-28 | 2017-12-19 | 埃泰克汽车电子(芜湖)有限公司 | 一种获取交通信号灯的汽车辅助系统 |
| CN109147352B (zh) * | 2018-11-02 | 2021-11-23 | 安徽安凯汽车股份有限公司 | 一种汽车红绿灯斑马线安全智能驾驶的控制系统及方法 |
-
2021
- 2021-11-15 JP JP2021185412A patent/JP7522713B2/ja active Active
-
2022
- 2022-11-07 CN CN202211386254.2A patent/CN116129666A/zh active Pending
- 2022-11-08 US US17/983,195 patent/US20230154325A1/en not_active Abandoned
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005165643A (ja) | 2003-12-02 | 2005-06-23 | Fujitsu Ten Ltd | 運転支援装置 |
| JP2013041624A (ja) | 2012-11-09 | 2013-02-28 | Toyota Motor Corp | 運転支援装置及び方法 |
| JP2014096168A (ja) | 2014-01-06 | 2014-05-22 | Toyota Motor Corp | 運転支援装置 |
| US20170301237A1 (en) | 2016-04-18 | 2017-10-19 | Ford Global Technologies, Llc | Systems and methods for intersection assistance using dedicated short range communications |
| WO2018074426A1 (ja) | 2016-10-21 | 2018-04-26 | 株式会社デンソー | センサ制御装置 |
| WO2019146052A1 (ja) | 2018-01-25 | 2019-08-01 | 日産自動車株式会社 | 自動運転車両の制御方法および制御装置 |
| JP2020046745A (ja) | 2018-09-14 | 2020-03-26 | 株式会社デンソーテン | 運転支援装置及び運転支援方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023072771A (ja) | 2023-05-25 |
| CN116129666A (zh) | 2023-05-16 |
| US20230154325A1 (en) | 2023-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7658472B2 (ja) | 車両用表示制御装置、車両用表示制御システム、及び車両用表示制御方法 | |
| JP6555355B2 (ja) | 自動運転車両操作装置及び自動運転車両操作方法 | |
| JP7004077B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP6654641B2 (ja) | 自動運転制御装置および自動運転制御方法 | |
| JP7189329B2 (ja) | 車両制御方法及び車両制御装置 | |
| JP7522713B2 (ja) | 運転支援装置 | |
| JP7147852B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP7143939B2 (ja) | 車両制御方法及び車両制御装置 | |
| WO2015151500A1 (ja) | 車両用表示制御装置 | |
| US11900698B2 (en) | Information processing device and information processing method | |
| JPWO2019159214A1 (ja) | 車両制御装置および車両制御方法 | |
| JP7791764B2 (ja) | 車両の運転支援装置 | |
| JP6967885B2 (ja) | 交通情報報知装置、及び交通情報報知方法 | |
| JP2014222421A (ja) | 運転支援装置 | |
| JP7147858B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP2010146459A (ja) | 運転支援装置 | |
| JP7581254B2 (ja) | 灯具システム | |
| JP7661924B2 (ja) | 車両用報知制御装置及び車両用報知制御方法 | |
| JP2015076006A (ja) | 運転支援装置 | |
| JP7139632B2 (ja) | 車両の自動運転制御ecuおよび自動運転制御方法 | |
| WO2022230780A1 (ja) | 車両用報知制御装置及び車両用報知制御方法 | |
| JP6367081B2 (ja) | 走行支援装置、走行支援プログラムおよび走行支援方法 | |
| JP2008097251A (ja) | 渋滞予測装置、運転支援装置、及び運転支援システム | |
| CN120712214A (zh) | 自动驾驶控制装置、自动驾驶控制程序、以及自动驾驶控制方法 | |
| JP2023075595A (ja) | 車両用描画装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240430 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240619 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240709 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240712 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7522713 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |