JP7525052B2 - 特徴量生成装置、歩容計測システム、特徴量生成方法、およびプログラム - Google Patents
特徴量生成装置、歩容計測システム、特徴量生成方法、およびプログラム Download PDFInfo
- Publication number
- JP7525052B2 JP7525052B2 JP2023508238A JP2023508238A JP7525052B2 JP 7525052 B2 JP7525052 B2 JP 7525052B2 JP 2023508238 A JP2023508238 A JP 2023508238A JP 2023508238 A JP2023508238 A JP 2023508238A JP 7525052 B2 JP7525052 B2 JP 7525052B2
- Authority
- JP
- Japan
- Prior art keywords
- feature
- walking
- data
- gait
- features
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005259 measurement Methods 0.000 title claims description 149
- 238000000034 method Methods 0.000 title claims description 26
- PWPJGUXAGUPAHP-UHFFFAOYSA-N lufenuron Chemical compound C1=C(Cl)C(OC(F)(F)C(C(F)(F)F)F)=CC(Cl)=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F PWPJGUXAGUPAHP-UHFFFAOYSA-N 0.000 title 1
- 230000005021 gait Effects 0.000 claims description 161
- 238000012545 processing Methods 0.000 claims description 138
- 230000001133 acceleration Effects 0.000 claims description 82
- 210000002683 foot Anatomy 0.000 claims description 79
- 238000000605 extraction Methods 0.000 claims description 43
- 230000033001 locomotion Effects 0.000 claims description 35
- 206010061159 Foot deformity Diseases 0.000 claims description 27
- 208000001963 Hallux Valgus Diseases 0.000 claims description 27
- 239000000203 mixture Substances 0.000 claims description 25
- 230000008569 process Effects 0.000 claims description 14
- 230000004044 response Effects 0.000 claims description 7
- 238000010586 diagram Methods 0.000 description 40
- 239000000284 extract Substances 0.000 description 32
- 238000004891 communication Methods 0.000 description 20
- 230000005540 biological transmission Effects 0.000 description 17
- 238000012795 verification Methods 0.000 description 17
- 230000010365 information processing Effects 0.000 description 15
- 238000004422 calculation algorithm Methods 0.000 description 10
- 238000012417 linear regression Methods 0.000 description 8
- 230000000875 corresponding effect Effects 0.000 description 6
- 230000006870 function Effects 0.000 description 6
- 210000003371 toe Anatomy 0.000 description 6
- 238000010219 correlation analysis Methods 0.000 description 5
- 238000001514 detection method Methods 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 4
- 210000001255 hallux Anatomy 0.000 description 4
- 238000010988 intraclass correlation coefficient Methods 0.000 description 4
- 238000007637 random forest analysis Methods 0.000 description 4
- 238000012706 support-vector machine Methods 0.000 description 4
- 238000012360 testing method Methods 0.000 description 3
- 210000002303 tibia Anatomy 0.000 description 3
- 208000027418 Wounds and injury Diseases 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 230000002596 correlated effect Effects 0.000 description 2
- 230000006378 damage Effects 0.000 description 2
- 208000014674 injury Diseases 0.000 description 2
- 238000000691 measurement method Methods 0.000 description 2
- 239000013598 vector Substances 0.000 description 2
- 238000010220 Pearson correlation analysis Methods 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 238000002790 cross-validation Methods 0.000 description 1
- 230000003203 everyday effect Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000001404 mediated effect Effects 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000012549 training Methods 0.000 description 1
Images





























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/112—Gait analysis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/6802—Sensor mounted on worn items
- A61B5/6804—Garments; Clothes
- A61B5/6807—Footwear
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7235—Details of waveform analysis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7235—Details of waveform analysis
- A61B5/7264—Classification of physiological signals or data, e.g. using neural networks, statistical classifiers, expert systems or fuzzy systems
- A61B5/7267—Classification of physiological signals or data, e.g. using neural networks, statistical classifiers, expert systems or fuzzy systems involving training the classification device
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Physiology (AREA)
- Artificial Intelligence (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Dentistry (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Psychiatry (AREA)
- Signal Processing (AREA)
- Evolutionary Computation (AREA)
- Fuzzy Systems (AREA)
- Mathematical Physics (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Description
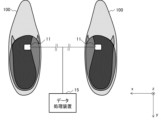
まず、第1の実施形態に係る歩容計測システムについて図面を参照しながら説明する。本実施形態の歩容計測システムは、ユーザの履く履物に設置されたセンサによって、足の動きに関する物理量に関するセンサデータを計測する。例えば、足の動きに関する物理量は、加速度センサによって計測される3軸方向の加速度(空間加速度とも呼ぶ)や、角速度センサによって計測される3軸周りの角速度(空間角速度とも呼ぶ)などである。本実施形態の歩容計測システムは、計測されたセンサデータの時系列データ(歩行波形とも呼ぶ)から、歩容に関する特徴量を抽出する。本実施形態の歩容計測システムは、センサ側で特徴量を抽出し、抽出された特徴量をセンサ側からデータ処理側に送信する。
図1は、本実施形態の歩容計測システム10の構成の一例を示すブロック図である。歩容計測システム10は、計測装置11とデータ処理装置15を備える。計測装置11とデータ処理装置15は、有線で接続されてもよいし、無線で接続されてもよい。計測装置11とデータ処理装置15は、単一の装置として構成してもよい。図1には計測装置11を一つしか図示していないが、左右両足に計測装置11が一つずつ(計二つ)配置されてもよい。
次に、計測装置11の詳細について図面を参照しながら説明する。図6は、計測装置11の詳細構成の一例を示すブロック図である。計測装置11は、加速度センサ111、角速度センサ112、制御部113、抽出部116、生成部117、および送信部119を有する。また、計測装置11は、図示しない電源を含む。加速度センサ111、角速度センサ112、および制御部113は、データ取得部110(データ取得装置とも呼ぶ)を構成する。抽出部116および生成部117は、特徴量生成部115(特徴量生成装置とも呼ぶ)を構成する。
次に、データ処理装置15の詳細について図面を参照しながら説明する。図9は、データ処理装置15の詳細構成の一例を示すブロック図である。データ処理装置15は、受信部151および処理部157を有する。
次に、歩容計測システム10の動作について図面を参照しながら説明する。ここでは、歩容計測システム10に含まれる計測装置11の動作について説明する。図10は、計測装置11の動作について説明するためのフローチャートである。図10のフローチャートに沿った説明においては、計測装置11を動作主体として説明する。
次に、第2の実施形態に係る歩容計測システムについて図面を参照しながら説明する。本実施形態の歩容計測システムは、センサ側で計測されたセンサデータをデータ処理側に送信し、データ処理側でセンサデータから特徴量を抽出する。本実施形態の歩容計測システムは、日常的な用途で使用することもできるが、センサデータのデータ通信量に制約がなく、センサデータをクラウドで処理する環境に適した構成である。
図11は、本実施形態の歩容計測システム20の構成の一例を示すブロック図である。歩容計測システム20は、計測装置21およびデータ処理装置25を備える。計測装置21とデータ処理装置25は、有線で接続されてもよいし、無線で接続されてもよい。計測装置21とデータ処理装置25は、単一の装置で構成してもよい。また、歩容計測システム20の構成から計測装置21を除き、データ処理装置25だけで歩容計測システム20を構成してもよい。図11には計測装置21を一つしか図示していないが、左右両足に計測装置21が一つずつ(計二つ)配置されてもよい。
次に、計測装置21の詳細について図面を参照しながら説明する。図12は、計測装置21の詳細構成の一例を示すブロック図である。計測装置21は、加速度センサ211、角速度センサ212、制御部213、および送信部219を有する。また、計測装置21は、図示しない電源を含む。加速度センサ211、角速度センサ212、および制御部213は、データ取得部210(データ取得装置)を構成する。
次に、データ処理装置25の詳細について図面を参照しながら説明する。図13は、データ処理装置25の詳細構成の一例を示すブロック図である。データ処理装置25は、受信部251、特徴量生成部255、および処理部257を有する。
次に、第3の実施形態に係る学習システムについて図面を参照しながら説明する。本実施形態の学習システムは、計測装置によって計測されたセンサデータから抽出された特徴量を用いた学習によって、特徴量の入力に応じて身体的特徴を推定するための推定モデルを生成する。
図14は、本実施形態の学習システム30の構成の一例を示すブロック図である。学習システム30は、計測装置31および学習装置35を備える。計測装置31と学習装置35は、有線で接続されてもよいし、無線で接続されてもよい。計測装置31と学習装置35は、単一の装置で構成してもよい。また、学習システム30の構成から計測装置31を除き、学習装置35だけで学習システム30を構成してもよい。図14には計測装置31を一つしか図示していないが、左右両足に計測装置31が一つずつ(計二つ)配置されてもよい。また、学習装置35は、計測装置31に接続されず、予め計測装置31によって生成されてデータベースに格納されていた特徴量データを用いて、学習を実行するように構成されてもよい。
次に、学習装置35の詳細について図面を参照しながら説明する。図15は、学習装置35の詳細構成の一例を示すブロック図である。学習装置35は、受信部351、学習部353、および記憶部355を有する。
次に、第4の実施形態に係る歩容計測システムについて図面を参照しながら説明する。本実施形態の歩容計測システムは、第3の実施形態の学習システムによって学習された推定モデルを用いて、ユーザの身体的特徴を推定する。
図17は、本実施形態の歩容計測システム40の構成の一例を示すブロック図である。歩容計測システム40は、計測装置41およびデータ処理装置45を備える。計測装置41とデータ処理装置45は、有線で接続されてもよいし、無線で接続されてもよい。計測装置41とデータ処理装置45は、単一の装置で構成してもよい。また、歩容計測システム40の構成から計測装置41を除き、データ処理装置45だけで歩容計測システム40を構成してもよい。図17には計測装置41を一つしか図示していないが、左右両足に計測装置41が一つずつ(計二つ)配置されてもよい。
次に、データ処理装置45の詳細について図面を参照しながら説明する。図18は、データ処理装置45の詳細構成の一例を示すブロック図である。データ処理装置45は、受信部451、記憶部455、および推定部457を有する。
図20は、計測装置41が設置された履物400を履いて歩行するユーザの携帯する携帯端末460の表示部に、データ処理装置45の推定部457による推定結果を表示させる一例を示す概念図である。図20は、ユーザの歩行中に蓄積された特徴量データを用いた推定結果に応じた情報を、携帯端末460の表示部に表示させる例である。
次に、第5の実施形態に係る特徴量生成装置について図面を参照しながら説明する。本実施形態の特徴量生成装置は、第1~第4の実施形態の特徴量生成部を簡略化した構成である。
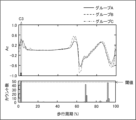
次に、時間軸上に正規化された一歩行周期分の歩行波形を、1%の歩行フェーズ(歩行周期)ごとに、外反母趾の進行度との相関性を分析した検証例について、図面を参照しながら説明する。本検証例は、足の動きに関するセンサデータに基づいて、外反母趾の進行度について検証した例である。本検証では、9種類の歩行波形(3軸加速度、3軸角速度、3軸足底角)について検証した。以下においては、外反母趾の進行度に関する特徴量が抽出される歩行波形を示す。
ここで、本開示の各実施形態に係る制御や処理を実行するハードウェア構成について、図31の情報処理装置90を一例として挙げて説明する。なお、図31の情報処理装置90は、各実施形態の制御や処理を実行するための構成例であって、本開示の範囲を限定するものではない。
11、21、31、41 計測装置
15、25、45 データ処理装置
30 学習システム
35 学習装置
110、210 データ取得部
111、211 加速度センサ
112、212 角速度センサ
113、213 制御部
115、255 特徴量生成部
116、516 抽出部
117、517 生成部
119、219 送信部
151、251、351、451 受信部
157、257 処理部
353 学習部
355、455 記憶部
457 推定部
460 携帯端末
515 特徴量生成装置
Claims (10)
- 足の動きに関するセンサデータの時系列データから一歩行周期分の歩行波形を生成し、生成された前記歩行波形から特徴量を抽出し、特徴量が抽出された時間的に連続する複数の歩行フェーズを統合して歩行フェーズクラスターを抽出する抽出手段と、
予め設定された特徴量構成式を用いて前記歩行フェーズクラスターの特徴量を生成し、前記歩行フェーズクラスターを構成する複数の前記歩行フェーズと、前記歩行フェーズクラスターの特徴量とが対応付けられた特徴量データを生成する生成手段と、を備える特徴量生成装置。 - 時間的に連続しない単独の歩行フェーズから特徴量が抽出された場合、
前記抽出手段は、
前記単独の歩行フェーズから抽出された特徴量を前記生成手段に出力し、
前記生成手段は、
前記単独の歩行フェーズと、前記単独の歩行フェーズの特徴量とが対応付けられた特徴量データを生成する請求項1に記載の特徴量生成装置。 - 時間的に連続しない単独の歩行フェーズから特徴量が抽出された場合、
前記抽出手段は、
前記単独の歩行フェーズを歩行フェーズクラスターとして抽出し、
前記生成手段は、
前記歩行フェーズクラスターとして抽出された前記単独の歩行フェーズと、前記単独の歩行フェーズの特徴量とが対応付けられた特徴量データを生成する請求項1に記載の特徴量生成装置。 - 前記抽出手段は、
予め設定された抽出対象の前記歩行フェーズクラスターを構成する前記歩行フェーズの特徴量を抽出する請求項1乃至3のいずれか一項に記載の特徴量生成装置。 - 前記抽出手段は、
特定の身体的特徴の影響を受ける歩容に関する特徴量を抽出し、
前記生成手段は、
前記特定の身体的特徴の影響を受ける歩容に関する特徴量を含む特徴量データを生成する請求項1乃至4のいずれか一項に記載の特徴量生成装置。 - 請求項1乃至5のいずれか一項に記載の特徴量生成装置と、計測対象であるユーザの履物に配置され、前記ユーザの歩行に応じて空間加速度および空間角速度を計測し、計測された前記空間加速度および前記空間角速度に基づくセンサデータを生成し、生成された前記センサデータを前記特徴量生成装置に出力するデータ取得装置とを有し、前記特徴量生成装置によって抽出される歩行フェーズクラスターの特徴量を含む特徴量データを送信する計測装置と、
前記特徴量生成装置によって送信される前記歩行フェーズクラスターの特徴量を受信し、受信された前記歩行フェーズクラスターの特徴量を用いて、前記ユーザの歩容に現れた特徴を検証するためのデータ処理を実行するデータ処理装置と、を備える歩容計測システム。 - 前記データ処理装置は、
入力された特徴量に応じて身体的特徴を出力する推定モデルに、前記ユーザの歩行に伴って計測される前記センサデータの時系列データから抽出される前記歩行フェーズクラスターの特徴量を入力し、前記推定モデルから出力される推定値に基づいて前記ユーザの身体的特徴を推定する請求項6に記載の歩容計測システム。 - 前記データ処理装置は、
入力された特徴量に応じて外反母趾の度合を出力する推定モデルに、前記ユーザの歩行に伴って計測される前記センサデータの時系列データから抽出される前記歩行フェーズクラスターの特徴量を入力し、前記推定モデルから出力される推定値に基づいて前記ユーザの外反母趾の度合を推定する請求項7に記載の歩容計測システム。 - コンピュータが、
足の動きに関するセンサデータの時系列データから一歩行周期分の歩行波形を生成し、生成された前記歩行波形から特徴量を抽出し、
特徴量が抽出された時間的に連続する複数の歩行フェーズを統合して歩行フェーズクラスターを抽出し、
特徴量構成式を用いて前記歩行フェーズクラスターの特徴量を生成し、
前記歩行フェーズクラスターを構成する複数の前記歩行フェーズと、前記歩行フェーズクラスターの特徴量とが対応付けられた特徴量データを生成する特徴量生成方法。 - 足の動きに関するセンサデータの時系列データから一歩行周期分の歩行波形を生成する処理と、生成された前記歩行波形から特徴量を抽出する処理と、
特徴量が抽出された時間的に連続する複数の歩行フェーズを統合して歩行フェーズクラスターを抽出する処理と、
特徴量構成式を用いて前記歩行フェーズクラスターの特徴量を生成する処理と、
前記歩行フェーズクラスターを構成する複数の前記歩行フェーズと、前記歩行フェーズクラスターの特徴量とが対応付けられた特徴量データを生成する処理とをコンピュータに実行させるプログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/012132 WO2022201338A1 (ja) | 2021-03-24 | 2021-03-24 | 特徴量生成装置、歩容計測システム、特徴量生成方法、および記録媒体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2022201338A1 JPWO2022201338A1 (ja) | 2022-09-29 |
| JPWO2022201338A5 JPWO2022201338A5 (ja) | 2023-10-16 |
| JP7525052B2 true JP7525052B2 (ja) | 2024-07-30 |
Family
ID=83396465
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023508238A Active JP7525052B2 (ja) | 2021-03-24 | 2021-03-24 | 特徴量生成装置、歩容計測システム、特徴量生成方法、およびプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (3) | US20240023835A1 (ja) |
| JP (1) | JP7525052B2 (ja) |
| WO (1) | WO2022201338A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004358229A (ja) | 2003-04-10 | 2004-12-24 | Matsushita Electric Ind Co Ltd | 身体運動解析装置および身体運動解析システム |
| JP2010005033A (ja) | 2008-06-25 | 2010-01-14 | Panasonic Electric Works Co Ltd | 歩行動作分析装置 |
| WO2019069417A1 (ja) | 2017-10-05 | 2019-04-11 | 日本電気株式会社 | 生体情報処理装置、生体情報処理システム、生体情報処理方法、および記憶媒体 |
| WO2020240751A1 (ja) | 2019-05-29 | 2020-12-03 | 日本電気株式会社 | 情報処理装置、個人識別装置、個人識別システム、情報処理方法及び記憶媒体 |
-
2021
- 2021-03-24 WO PCT/JP2021/012132 patent/WO2022201338A1/ja not_active Ceased
- 2021-03-24 JP JP2023508238A patent/JP7525052B2/ja active Active
- 2021-03-24 US US18/266,414 patent/US20240023835A1/en active Pending
-
2023
- 2023-12-22 US US18/393,929 patent/US20240138711A1/en active Pending
- 2023-12-22 US US18/393,969 patent/US20240138712A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004358229A (ja) | 2003-04-10 | 2004-12-24 | Matsushita Electric Ind Co Ltd | 身体運動解析装置および身体運動解析システム |
| JP2010005033A (ja) | 2008-06-25 | 2010-01-14 | Panasonic Electric Works Co Ltd | 歩行動作分析装置 |
| WO2019069417A1 (ja) | 2017-10-05 | 2019-04-11 | 日本電気株式会社 | 生体情報処理装置、生体情報処理システム、生体情報処理方法、および記憶媒体 |
| WO2020240751A1 (ja) | 2019-05-29 | 2020-12-03 | 日本電気株式会社 | 情報処理装置、個人識別装置、個人識別システム、情報処理方法及び記憶媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022201338A1 (ja) | 2022-09-29 |
| US20240138712A1 (en) | 2024-05-02 |
| JPWO2022201338A1 (ja) | 2022-09-29 |
| US20240138711A1 (en) | 2024-05-02 |
| US20240023835A1 (en) | 2024-01-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7327516B2 (ja) | 異常検出装置、判定システム、異常検出方法、およびプログラム | |
| US20260088177A1 (en) | Estimation device, estimation system, estimation method, and recording medium | |
| US20240148277A1 (en) | Estimation device, estimation method, and program recording medium | |
| US20240172966A1 (en) | Harmonic index estimation device, estimation system, harmonic index estimation method, and recording medium | |
| JP7729406B2 (ja) | 動的バランス推定装置、動的バランス推定システム、動的バランス推定方法、およびプログラム | |
| JP7525052B2 (ja) | 特徴量生成装置、歩容計測システム、特徴量生成方法、およびプログラム | |
| JP7459965B2 (ja) | 判別装置、判別システム、判別方法、およびプログラム | |
| JP7704216B2 (ja) | 特徴量データ生成装置、歩容計測装置、身体状態推定システム、特徴量データ生成方法、およびプログラム | |
| JP7772091B2 (ja) | 筋力指標推定装置、筋力指標推定システム、筋力指標推定方法、およびプログラム | |
| JP7715212B2 (ja) | 静的バランス推定装置、静的バランス推定システム、静的バランス推定方法、およびプログラム | |
| JP7790451B2 (ja) | 移動能力推定装置、移動能力推定システム、移動能力推定方法、およびプログラム | |
| JP7852383B2 (ja) | フレイル推定装置、推定システム、フレイル推定方法、およびプログラム | |
| JP7726299B2 (ja) | 易転倒性推定装置、易転倒性推定システム、易転倒性推定方法、およびプログラム | |
| JP7525057B2 (ja) | 生体情報処理装置、情報処理システム、生体情報処理方法、およびプログラム | |
| US20230397879A1 (en) | Pelvic inclination estimation device, estimation system, pelvic inclination estimation method, and recording medium | |
| JP7670172B2 (ja) | 下肢筋力推定装置、下肢筋力推定システム、下肢筋力推定方法、およびプログラム | |
| JP2024101908A (ja) | 推定装置、推定システム、推定方法、およびプログラム | |
| JP2023179870A (ja) | 腰部揺動推定装置、推定システム、腰部揺動推定方法、およびプログラム | |
| JP2024140356A (ja) | 膝痛リスク推定装置、身体状態推定システム、膝痛リスク推定方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230719 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230719 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240531 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240618 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240701 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7525052 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |