JP7533253B2 - 自律移動システム、自律移動方法及び自律移動プログラム - Google Patents
自律移動システム、自律移動方法及び自律移動プログラム Download PDFInfo
- Publication number
- JP7533253B2 JP7533253B2 JP2021015378A JP2021015378A JP7533253B2 JP 7533253 B2 JP7533253 B2 JP 7533253B2 JP 2021015378 A JP2021015378 A JP 2021015378A JP 2021015378 A JP2021015378 A JP 2021015378A JP 7533253 B2 JP7533253 B2 JP 7533253B2
- Authority
- JP
- Japan
- Prior art keywords
- person
- car
- autonomous mobile
- cage
- elevator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/34—Details, e.g. call counting devices, data transmission from car to control system, devices giving information to the control system
- B66B1/46—Adaptations of switches or switchgear
- B66B1/468—Call registering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B13/00—Doors, gates, or other apparatus controlling access to, or exit from, cages or lift well landings
- B66B13/02—Door or gate operation
- B66B13/14—Control systems or devices
- B66B13/143—Control systems or devices electrical
- B66B13/146—Control systems or devices electrical method or algorithm for controlling doors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B13/00—Doors, gates, or other apparatus controlling access to, or exit from, cages or lift well landings
- B66B13/02—Door or gate operation
- B66B13/14—Control systems or devices
- B66B13/16—Door or gate locking devices controlled or primarily controlled by condition of cage, e.g. movement or position
- B66B13/165—Door or gate locking devices controlled or primarily controlled by condition of cage, e.g. movement or position electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B17/00—Hoistway equipment
- B66B17/14—Applications of loading and unloading equipment
- B66B17/16—Applications of loading and unloading equipment for loading and unloading mining-hoist cars or cages
- B66B17/20—Applications of loading and unloading equipment for loading and unloading mining-hoist cars or cages by moving vehicles into, or out of, the cars or cages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0006—Monitoring devices or performance analysers
- B66B5/0012—Devices monitoring the users of the elevator system
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0088—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/028—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using a RF signal
- G05D1/0282—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using a RF signal generated in a local control room
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/227—Handing over between remote control and on-board control; Handing over between remote control arrangements
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/646—Following a predefined trajectory, e.g. a line marked on the floor or a flight path
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/20—Details of the evaluation method for the allocation of a call to an elevator car
- B66B2201/211—Waiting time, i.e. response time
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/40—Details of the change of control mode
- B66B2201/46—Switches or switchgear
- B66B2201/4607—Call registering systems
- B66B2201/4615—Wherein the destination is registered before boarding
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/40—Details of the change of control mode
- B66B2201/46—Switches or switchgear
- B66B2201/4607—Call registering systems
- B66B2201/4653—Call registering systems wherein the call is registered using portable devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/40—Details of the change of control mode
- B66B2201/46—Switches or switchgear
- B66B2201/4607—Call registering systems
- B66B2201/4661—Call registering systems for priority users
- B66B2201/4669—Call registering systems for priority users using passenger condition detectors
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Business, Economics & Management (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Elevator Control (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
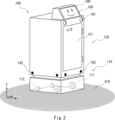
実施形態1に係る自律移動システムを説明する。本実施形態では、自律移動システムを、自律移動装置に置き換えてもよいし、自律移動装置を、自律移動システムに置き換えてもよい。また、本実施形態の自律移動システムは、自律移動装置を備えるとしてもよい。自律移動装置は、所定の施設内を自律移動する。自律移動装置は、例えば、自律移動する移動ロボットでもよいし、物品を搬送するために自律移動する搬送ロボットでもよい。以下では、移動ロボットを自律移動装置の一例として説明する。移動ロボットについて、<移動ロボットの構成>及び<移動ロボットの動作>に分けて説明する。
図1は、実施形態1に係る移動ロボットを例示した概略図である。図1に示すように、移動ロボット100は、エレベータ700を有する施設900内を自律移動する自律移動装置の一例である。施設900は、例えば、病院である。なお、施設900は、エレベータ700を有し、移動ロボット100が自律移動可能な施設であれば、病院に限らず、ホテル、ショッピングモール等でもよい。
次に、本実施形態の移動ロボットの動作を説明する。例えば、ユーザは、移動ロボット100の電源をオンさせる。そして、ユーザは、操作受付部140に所望のタスクを入力する。なお、電源をオンする際、または、操作受付部140で操作する際に、必要があれば、IDセンサ170によって、ユーザのIDを識別させる。
次に、実施形態2に係る自律移動システムを説明する。本実施形態の自律移動システムは、エレベータ700を有する施設900内を自律移動する自律移動装置を制御するシステムである。自律移動システムについて、<自律移動システムの構成>及び<自律移動システムの動作>に分けて説明する。
自律移動システムは、移動ロボット100を備えている。自律移動システムは、複数の移動ロボット100を備えてもよい。また、自律移動システムは、移動ロボット100の他、サーバ装置300を備えてもよい。
本実施形態の移動ロボット100の構成は、前述の実施形態1と同様である。本実施形態の移動ロボット100は、実施形態1の移動ロボット100における機能のいくつかをサーバ装置300にさせてもよい。
サーバ装置300は、例えば、通信機能を有するコンピュータである。サーバ装置300は、自律移動システムの各構成と通信可能であれば任意の場所に設置されてよい。サーバ装置300は、移動ロボット100との間で走行情報を送受信する。また、サーバ装置300は、エレベータ制御部780を制御して、または、エレベータ制御部780の代わりに、エレベータ700の籠750の昇降を制御してもよい。
次に、自律移動システムの動作を説明する。図9は、実施形態2に係る自律移動システムの動作を例示したシークエンス図である。
(付記1)
エレベータを有する施設内を自律移動する自律移動装置の自律移動方法であって、
前記エレベータの籠内において、前記籠内に乗り込む人または前記籠内に乗り込む物を判定するステップと、
前記人または前記物に基づいて、前記籠内の待機位置を移動させるステップと、
を備えた、自律移動方法。
(付記2)
前記判定するステップにおいて、
前記籠がフロアに停止する前または前記籠の扉が開く前に、前記人または前記物を判定し、
前記籠内の待機位置を移動させるステップにおいて、
前記籠が前記フロアに停止する前または前記籠の扉が開く前に、前記待機位置を移動させる、
付記1に記載の自律移動方法。
(付記3)
前記判定するステップにおいて、
前記籠が、前記人または前記物の行先フロアに到着するよりも前に、前記自律移動装置の前記行先フロアに到着するか判定し、
前記籠内の待機位置を移動させるステップにおいて、
前記人または前記物が前記籠内に乗り込むフロアにおいて、一旦、前記籠から降り、前記人または前記物の後から前記籠内に乗り込む、
付記1または2に記載の自律移動方法。
(付記4)
前記物は、他の自律移動システムであり、
前記判定するステップにおいて、
前記籠がフロアに停止する前または前記籠の扉が開く前に、前記他の自律移動システムの行先フロアの情報を取得する、
付記1~3のいずれか1項に記載の自律移動方法。
(付記5)
エレベータを有する施設内を自律移動する自律移動装置の自律移動プログラムであって、
前記エレベータの籠内において、前記籠内に乗り込む人または前記籠内に乗り込む物を判定させ、
前記人または前記物に基づいて、前記籠内の待機位置を移動させる、
ことをコンピュータに実行させる自律移動プログラム。
(付記6)
前記判定する際に、
前記籠がフロアに停止する前または前記籠の扉が開く前に、前記人または前記物を判定させ、
前記籠内の待機位置を移動させる際に、
前記籠が前記フロアに停止する前または前記籠の扉が開く前に、前記待機位置を移動させる、
ことをコンピュータに実行させる付記5に記載の自律移動プログラム。
(付記6)
前記判定する際に、
前記籠が、前記人または前記物の行先フロアに到着するよりも前に、前記自律移動装置の前記行先フロアに到着するか判定させ、
前記籠内の待機位置を移動させる際に、
前記人または前記物が前記籠内に乗り込むフロアにおいて、一旦、前記籠から降りさせ、前記人または前記物の後から前記籠内に乗り込ませる、
ことをコンピュータに実行させる付記5または6に記載の自律移動プログラム。
(付記8)
前記物は、他の自律移動システムであり、
前記判定する際に
前記籠がフロアに停止する前または前記籠の扉が開く前に、前記他の自律移動システムの行先フロアの情報を取得させる、
ことをコンピュータに実行させる付記5~7のいずれか1項に記載の自律移動プログラム。
110 駆動部
111 駆動輪
112 キャスター
120 筐体部
121 収納室扉
130 通信部
140 操作受付部
150 表示部
160 センサ群
161 ロボットカメラ
162 距離センサ
170 IDセンサ
180 制御部
190 記憶部
300 サーバ装置
330 通信部
380 制御部
390 記憶部
400 施設カメラ
500 アクセスポイント
610 人
620 物
700 エレベータ
710 呼び出しスイッチ
720 行先スイッチ
740 籠扉
750 籠
760 エレベータホール
770 エレベータ扉
780 エレベータ制御部
900 施設
910 床面
920 天井
Claims (10)
- エレベータを有する施設内を自律移動する自律移動システムであって、
エレベータホールを撮像した画像から前記エレベータホールで待機する人及び物を判定し、
前記エレベータの籠内において、前記籠内に乗り込む前記人または前記籠内に乗り込む前記物に基づいて、前記籠内の待機位置を移動させる、
自律移動システム。 - 前記籠がフロアに停止する前または前記籠の扉が開く前に、前記人または前記物を判定し、前記籠が前記フロアに停止する前または前記籠の扉が開く前に、前記待機位置を移動させる、
請求項1に記載の自律移動システム。 - 前記人の行先フロアの情報を記憶した記憶部またはサーバ装置から前記人の前記行先フロアの情報を取得し、
前記籠が、前記人の行先フロアに到着するよりも前に、前記自律移動システムの前記行先フロアに到着する場合には、前記人が前記籠内に乗り込むフロアにおいて、一旦、前記籠から降り、前記人が乗り込んだ後から前記籠内に乗り込む、
請求項1または2に記載の自律移動システム。 - 前記物は、他の自律移動システムであり、
前記籠がフロアに停止する前または前記籠の扉が開く前に、前記他の自律移動システムの行先フロアの情報を取得する、
請求項1~3のいずれか1項に記載の自律移動システム。 - エレベータを有する施設内を自律移動する自律移動装置と、
前記自律移動装置との間で走行情報を送受信するサーバ装置と、
を備え、
前記サーバ装置は、エレベータホールを撮像した画像から前記エレベータホールで待機する人及び物を判定し、
前記サーバ装置は、前記エレベータの籠内に乗り込む前記人または前記籠内に乗り込む前記物に基づいて、前記籠内の前記自律移動装置の待機位置を移動させる、
自律移動システム。 - 前記サーバ装置は、前記籠がフロアに停止する前または前記籠の扉が開く前に、前記人または前記物を判定し、前記籠が前記フロアに停止する前または前記籠の扉が開く前に、前記自律移動装置の前記待機位置を移動させる、
請求項5に記載の自律移動システム。 - 前記サーバ装置は、前記人の行先フロアの情報を記憶し、前記人の前記行先フロアの情報を取得し、
前記サーバ装置は、前記籠が前記人の行先フロアに到着するよりも前に、前記自律移動装置の前記行先フロアに到着する場合には、前記人が前記籠内に乗り込むフロアにおいて、一旦、前記自律移動装置を前記籠から降りさせ、前記人の後から前記籠内に乗り込ませる、
請求項5または6に記載の自律移動システム。 - 前記自律移動装置は、第1の自律移動装置及び第2の自律移動装置を含む複数であり、
前記籠内の前記自律移動装置は、前記第1の自律移動装置であり、
前記物は、前記第2の自律移動装置であり、
前記サーバ装置は、前記籠がフロアに停止する前または前記籠の扉が開く前に、前記第2の自律移動装置の行先フロアの情報を前記第1の自律移動装置に送信する、
請求項5~7のいずれか1項に記載の自律移動システム。 - エレベータを有する施設内を自律移動する自律移動装置の自律移動方法であって、
エレベータホールを撮像した画像から前記エレベータホールで待機する人及び物を判定するステップと、
前記エレベータの籠内において、前記籠内に乗り込む前記人または前記籠内に乗り込む前記物を判定させるステップと、
前記人または前記物に基づいて、前記籠内の待機位置を移動させるステップと、
を備えた自律移動方法。 - エレベータを有する施設内を自律移動する自律移動装置の自律移動プログラムであって、
エレベータホールを撮像した画像から前記エレベータホールで待機する人及び物を判定させ、
前記エレベータの籠内において、前記籠内に乗り込む前記人または前記籠内に乗り込む前記物を判定させ、
前記人または前記物に基づいて、前記籠内の待機位置を移動させる、
ことをコンピュータに実行させる自律移動プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021015378A JP7533253B2 (ja) | 2021-02-03 | 2021-02-03 | 自律移動システム、自律移動方法及び自律移動プログラム |
| US17/530,590 US12111660B2 (en) | 2021-02-03 | 2021-11-19 | Autonomous movement system, autonomous movement method, and autonomous movement program |
| CN202210079328.1A CN114852809B (zh) | 2021-02-03 | 2022-01-24 | 自主移动系统、自主移动方法和存储介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021015378A JP7533253B2 (ja) | 2021-02-03 | 2021-02-03 | 自律移動システム、自律移動方法及び自律移動プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022118737A JP2022118737A (ja) | 2022-08-16 |
| JP7533253B2 true JP7533253B2 (ja) | 2024-08-14 |
Family
ID=82612468
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021015378A Active JP7533253B2 (ja) | 2021-02-03 | 2021-02-03 | 自律移動システム、自律移動方法及び自律移動プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12111660B2 (ja) |
| JP (1) | JP7533253B2 (ja) |
| CN (1) | CN114852809B (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102363944B1 (ko) * | 2020-07-15 | 2022-02-17 | 네이버랩스 주식회사 | 로봇 탑승을 위한 엘리베이터 제어 방법 및 시스템 |
| KR102932140B1 (ko) | 2023-05-20 | 2026-03-03 | 현대엘리베이터주식회사 | 엘리베이터 제어 방법 및 시스템 |
| GB2634104A (en) * | 2023-09-29 | 2025-04-02 | Continental Automotive Tech Gmbh | A method for controlling a conveyor system for automated conveying of autonomous mobile robots |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018066056A1 (ja) | 2016-10-04 | 2018-04-12 | 三菱電機株式会社 | エレベーターシステム |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4811775B2 (ja) * | 2001-09-13 | 2011-11-09 | 株式会社安川電機 | エレベータ籠内物体認識装置 |
| JP2005018382A (ja) * | 2003-06-25 | 2005-01-20 | Matsushita Electric Works Ltd | エレベータ乗降自律移動ロボット |
| EP2295361B1 (en) * | 2008-07-07 | 2014-10-22 | Mitsubishi Electric Corporation | Elevator control apparatus and elevator control method |
| JP2011057322A (ja) * | 2009-09-07 | 2011-03-24 | Toshiba Elevator Co Ltd | エレベータシステム |
| JP5572018B2 (ja) * | 2010-07-08 | 2014-08-13 | 株式会社日立製作所 | 自律移動装置同乗エレベータシステム |
| US11325250B2 (en) * | 2017-02-06 | 2022-05-10 | Cobalt Robotics Inc. | Robot with rotatable arm |
| WO2017199343A1 (ja) | 2016-05-17 | 2017-11-23 | 三菱電機株式会社 | エレベータシステム |
| JP6791399B2 (ja) * | 2017-10-11 | 2020-11-25 | 三菱電機株式会社 | エレベーターの防犯システム |
| JP6729979B1 (ja) | 2019-01-30 | 2020-07-29 | 東芝エレベータ株式会社 | エレベータを用いた配達システム、エレベータ制御装置、およびエレベータ制御方法 |
-
2021
- 2021-02-03 JP JP2021015378A patent/JP7533253B2/ja active Active
- 2021-11-19 US US17/530,590 patent/US12111660B2/en active Active
-
2022
- 2022-01-24 CN CN202210079328.1A patent/CN114852809B/zh active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018066056A1 (ja) | 2016-10-04 | 2018-04-12 | 三菱電機株式会社 | エレベーターシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022118737A (ja) | 2022-08-16 |
| US12111660B2 (en) | 2024-10-08 |
| CN114852809A (zh) | 2022-08-05 |
| US20220244730A1 (en) | 2022-08-04 |
| CN114852809B (zh) | 2024-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7468332B2 (ja) | 自律移動システム、自律移動方法及び自律移動プログラム | |
| US12135553B2 (en) | Robotic cart | |
| JP7484761B2 (ja) | 制御システム、制御方法、及びプログラム | |
| JP7533253B2 (ja) | 自律移動システム、自律移動方法及び自律移動プログラム | |
| JP7484758B2 (ja) | ロボット制御システム | |
| JP7494746B2 (ja) | 自律移動システム、自律移動方法及び自律移動プログラム | |
| JP7480698B2 (ja) | 自律移動システム、自律移動方法及び自律移動プログラム | |
| US11919168B2 (en) | Robot control system, robot control method, and computer readable medium | |
| JP7468338B2 (ja) | 自律移動システム、自律移動方法及び自律移動プログラム | |
| US12306631B2 (en) | Robot control system, robot control method, and program | |
| JP7521442B2 (ja) | 自律移動システム、自律移動方法及び自律移動プログラム | |
| US11914397B2 (en) | Robot control system, robot control method, and program | |
| JP7548041B2 (ja) | ロボット制御システム | |
| JP7491229B2 (ja) | 自律移動システム、自律移動方法及び自律移動プログラム | |
| JP7567639B2 (ja) | ロボット制御システム、ロボット制御方法、及び、制御プログラム | |
| JP7480639B2 (ja) | 移動ロボット制御システム | |
| JP7484742B2 (ja) | 自律移動システム、自律移動方法及び自律移動プログラム | |
| WO2024106064A1 (ja) | ロボット制御システム、ロボット制御方法、及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230822 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240327 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240514 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240702 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240715 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7533253 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |