JP7534065B2 - 誘導システム - Google Patents
誘導システム Download PDFInfo
- Publication number
- JP7534065B2 JP7534065B2 JP2022144758A JP2022144758A JP7534065B2 JP 7534065 B2 JP7534065 B2 JP 7534065B2 JP 2022144758 A JP2022144758 A JP 2022144758A JP 2022144758 A JP2022144758 A JP 2022144758A JP 7534065 B2 JP7534065 B2 JP 7534065B2
- Authority
- JP
- Japan
- Prior art keywords
- unmanned aerial
- vehicle
- aerial vehicle
- height
- guidance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Navigation (AREA)
Description
図1~図4のとおり、誘導システムSは、オペレータOが操作する有人搬送車1を備える。有人搬送車1は、オペレータOが操作することで動作するように構成されている。本実施形態では、有人搬送車1は、カウンタバランス式のフォークリフトであって、オペレータOが操作することで、車体の走行、及びフォークの昇降を行うことができるように構成されている。
図8~図13に基づいて、誘導システムSにおける他の実施形態を説明する。
なお、上記第1実施形態と同様の構成については、重複説明を避けるために省略することがある。
図8のとおり、管理装置3の配置決定部32は、無人飛行体2が荷役位置D2の高さに配置されるよう無人飛行体2の空中停止位置を決定するよう構成されてもよい。即ち、管理装置3の記憶部30は、荷役スケジュールJの各タスクTの荷役位置D2の高さ位置が記憶されている。荷役位置D2の高さ位置とは、各タスクTで荷役される荷物Lの高さである。有人搬送車1によって、荷役位置D2の高さ位置で荷物Lに対して荷取り・荷置きの荷役が行われる。配置決定部32は、各タスクTの荷役位置D2の高さ位置に相当する高さで無人飛行体2がホバリングして空中停止するように構成されている。
図9のとおり、管理装置3の配置決定部32は、無人飛行体2が荷役位置D2の高さ位置に配置されるよう無人飛行体2の空中停止位置を決定するよう構成されてもよい。そして、無人飛行体2は、発光装置(不図示)を備えており、オペレータOが無人飛行体2の位置を容易に認識できるように発光するよう構成されている。
図10のとおり、管理装置3の配置決定部32は、無人飛行体2が荷役位置D2の高さ位置に配置されるよう無人飛行体2の空中停止位置を決定するよう構成されてもよい。そして、無人飛行体2は、投影部23を備えており、投影部23は、施設の天井Cに誘導画像200(201)を投影することができるよう構成されている。
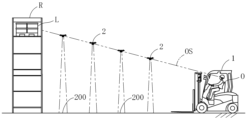
図11のとおり、管理装置3の配置決定部32は、有人搬送車1を操作するオペレータOの目の高さと荷役位置D2の高さ位置とを結ぶ直線OS上に無人飛行体2の空中停止位置を決定するよう構成されてもよい。そして、無人飛行体2は、発光装置(不図示)を備えており、オペレータOが無人飛行体2の位置を容易に認識できるように発光するよう構成されている。
図12のとおり、管理装置3の配置決定部32は、有人搬送車1を操作するオペレータOの目の高さと荷役位置D2の高さ位置とを結ぶ直線OS上に無人飛行体2の空中停止位置を決定するよう構成されてもよい。そして、無人飛行体2は、投影部23を備えており、投影部23は、施設の通路Pに誘導画像200(201)を投影することができるよう構成されている。
図13のとおり、管理装置3の配置決定部32は、無人飛行体2が荷役位置D2の高さ位置に配置されるよう無人飛行体2の空中停止位置を決定するよう構成されてもよい。そして、無人飛行体2は、投影部23を備えており、投影部23は、施設の天井Cに誘導画像200(201)を投影することができるよう構成されている。
管理装置3の投影指示部33は、無人飛行体2が路面P又は天井Cに向けて誘導画像200(201)を投影するときに、無人飛行体2の空中停止位置の高さに応じて、誘導画像200(201)が路面P又は天井Cに鮮明に投影されるようピントを調整するフォーカス調整を行うように制御してもよい。
1 有人搬送車
2 無人飛行体
3 管理装置
4 誘導路
S 誘導システム
22 記憶部
23 投影部
31 誘導路生成部
32 配置決定部
33 撮影指示部
D1 車両位置
D2 荷役位置
D3 屈曲位置
R 棚
P 路面
C 天井
200 第1誘導画像
201 第2誘導画像
Claims (7)
- オペレータが操作する有人搬送車と、
路面に誘導画像を投影するための投影部を有すると共に、空中停止可能な複数台の無人飛行体と、
前記無人飛行体を制御する管理装置と、
前記有人搬送車の車両位置と荷役位置との間に誘導路を生成する誘導路生成部と、
前記誘導路上で前記複数台の無人飛行体が空中停止する位置を決定する配置決定部と、
前記誘導路上に空中停止する前記無人飛行体の間隔の距離に基づいて、前記路面に投影される前記誘導画像を決定して前記投影部に指示を送る投影指示部と、を備え、
前記配置決定部は、前記無人飛行体が前記荷役位置の高さに配置されるよう前記無人飛行体の空中停止位置を決定する
ことを特徴とする誘導システム。 - 前記投影指示部は、
前記無人飛行体の間隔の距離が予め設定された所定距離より短いとき、第1誘導画像を投影し、
前記無人飛行体の間隔の距離が前記所定距離より長いとき、第2誘導画像を投影するよう決定する
ことを特徴とする請求項1に記載の誘導システム。 - 前記第2誘導画像は、前記第1誘導画像より広範囲に投影される
ことを特徴とする請求項2に記載の誘導システム。 - 前記管理装置は、前記荷役位置の高さが棚の最下段の高さに相当するとき、前記無人飛行体が発光するように制御する
ことを特徴とする請求項1に記載の誘導システム。 - 前記管理装置は、前記荷役位置の高さが棚の最下段の高さに相当するとき、前記無人飛行体が天井に向けて誘導画像を投影するように制御する投影指示部を備える
ことを特徴とする請求項1に記載の誘導システム。 - オペレータが操作する有人搬送車と、
路面に誘導画像を投影するための投影部を有すると共に、空中停止可能な複数台の無人飛行体と、
前記無人飛行体を制御する管理装置と、
前記有人搬送車の車両位置と荷役位置との間に誘導路を生成する誘導路生成部と、
前記誘導路上で前記複数台の無人飛行体が空中停止する位置を決定する配置決定部と、
前記誘導路上に空中停止する前記無人飛行体の間隔の距離に基づいて、前記路面に投影される前記誘導画像を決定して前記投影部に指示を送る投影指示部と、を備え、
前記配置決定部は、前記有人搬送車を操作するオペレータの目に相当する高さと前記荷役位置の高さとを結ぶ直線上に前記無人飛行体の空中停止位置を決定する
ことを特徴とする誘導システム。 - 前記管理装置は、前記無人飛行体が路面に向けて誘導画像を投影するように制御する投影指示部を備える
ことを特徴とする請求項6に記載の誘導システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022144758A JP7534065B2 (ja) | 2022-09-12 | 2022-09-12 | 誘導システム |
| JP2024119243A JP7687803B2 (ja) | 2022-09-12 | 2024-07-25 | 誘導システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022144758A JP7534065B2 (ja) | 2022-09-12 | 2022-09-12 | 誘導システム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024119243A Division JP7687803B2 (ja) | 2022-09-12 | 2024-07-25 | 誘導システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2024039975A JP2024039975A (ja) | 2024-03-25 |
| JP7534065B2 true JP7534065B2 (ja) | 2024-08-14 |
Family
ID=90367162
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022144758A Active JP7534065B2 (ja) | 2022-09-12 | 2022-09-12 | 誘導システム |
| JP2024119243A Active JP7687803B2 (ja) | 2022-09-12 | 2024-07-25 | 誘導システム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024119243A Active JP7687803B2 (ja) | 2022-09-12 | 2024-07-25 | 誘導システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP7534065B2 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008520046A (ja) | 2004-11-12 | 2008-06-12 | ザ・ボーイング・カンパニー | 光レーザ誘導システム装置及び方法 |
| JP2016090318A (ja) | 2014-10-31 | 2016-05-23 | 株式会社日本自動車部品総合研究所 | 投影端末 |
| JP2017117353A (ja) | 2015-12-25 | 2017-06-29 | シャダイ株式会社 | 移動体プラットフォームシステム |
| US20200012293A1 (en) | 2019-08-27 | 2020-01-09 | Lg Electronics Inc. | Robot and method of providing guidance service by the robot |
| US20200209886A1 (en) | 2018-12-28 | 2020-07-02 | Cube Ai Co., Ltd. | Method for guiding path of unmanned autonomous vehicle and assistant system for unmanned autonomous vehicle therfor |
| JP2021006954A (ja) | 2019-06-28 | 2021-01-21 | 国立大学法人東海国立大学機構 | 制御システム及び制御プログラム |
| CN113155117A (zh) | 2020-01-23 | 2021-07-23 | 阿里巴巴集团控股有限公司 | 导航系统、方法和装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07200058A (ja) * | 1993-12-28 | 1995-08-04 | Hitachi Zosen Corp | 移動体の誘導方法およびその誘導装置 |
| WO2017057053A1 (ja) | 2015-09-30 | 2017-04-06 | ソニー株式会社 | 情報処理装置、情報処理方法 |
-
2022
- 2022-09-12 JP JP2022144758A patent/JP7534065B2/ja active Active
-
2024
- 2024-07-25 JP JP2024119243A patent/JP7687803B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008520046A (ja) | 2004-11-12 | 2008-06-12 | ザ・ボーイング・カンパニー | 光レーザ誘導システム装置及び方法 |
| JP2016090318A (ja) | 2014-10-31 | 2016-05-23 | 株式会社日本自動車部品総合研究所 | 投影端末 |
| JP2017117353A (ja) | 2015-12-25 | 2017-06-29 | シャダイ株式会社 | 移動体プラットフォームシステム |
| US20200209886A1 (en) | 2018-12-28 | 2020-07-02 | Cube Ai Co., Ltd. | Method for guiding path of unmanned autonomous vehicle and assistant system for unmanned autonomous vehicle therfor |
| JP2021006954A (ja) | 2019-06-28 | 2021-01-21 | 国立大学法人東海国立大学機構 | 制御システム及び制御プログラム |
| US20200012293A1 (en) | 2019-08-27 | 2020-01-09 | Lg Electronics Inc. | Robot and method of providing guidance service by the robot |
| CN113155117A (zh) | 2020-01-23 | 2021-07-23 | 阿里巴巴集团控股有限公司 | 导航系统、方法和装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2024157564A (ja) | 2024-11-07 |
| JP7687803B2 (ja) | 2025-06-03 |
| JP2024039975A (ja) | 2024-03-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7478185B2 (ja) | 誘導システム | |
| CN110945450B (zh) | 人机交互自动导引车辆 | |
| JP7452938B2 (ja) | 誘導システム | |
| JP7478182B2 (ja) | 誘導システム | |
| CN111273654A (zh) | 用于运行自主式地面运输工具的方法和企业内部物流系统 | |
| JP7436132B2 (ja) | 誘導システム | |
| JP7436133B2 (ja) | 誘導システム | |
| JP7430975B2 (ja) | 誘導システム | |
| JP7452940B2 (ja) | 誘導システム | |
| JP7534065B2 (ja) | 誘導システム | |
| JP7488016B2 (ja) | 誘導システム | |
| JP7553525B2 (ja) | 誘導システム | |
| JP7478198B2 (ja) | 誘導システム | |
| JP7478192B2 (ja) | 誘導システム | |
| JP7444531B2 (ja) | 誘導システム | |
| JP7478200B2 (ja) | 誘導システム | |
| JP7509511B2 (ja) | 誘導システム | |
| JP2025055860A (ja) | 搬送システム | |
| JP7529724B2 (ja) | 誘導システム | |
| JP7517785B2 (ja) | 誘導システム | |
| EP4603441A1 (en) | Systems and methods for projections from a material handling vehicle | |
| JP6687313B1 (ja) | 搬送システム | |
| JP2025055861A (ja) | 搬送システム | |
| JP2024067649A (ja) | 誘導システム | |
| JP2020170286A (ja) | 無人航空機の室内飛行制御システム、無人航空機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230926 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20240604 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20240604 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240703 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240725 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240731 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240731 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7534065 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |